
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Multipath Suppression and High-precision Angle Measurement Method Based on Feature Game Preprocessing
-
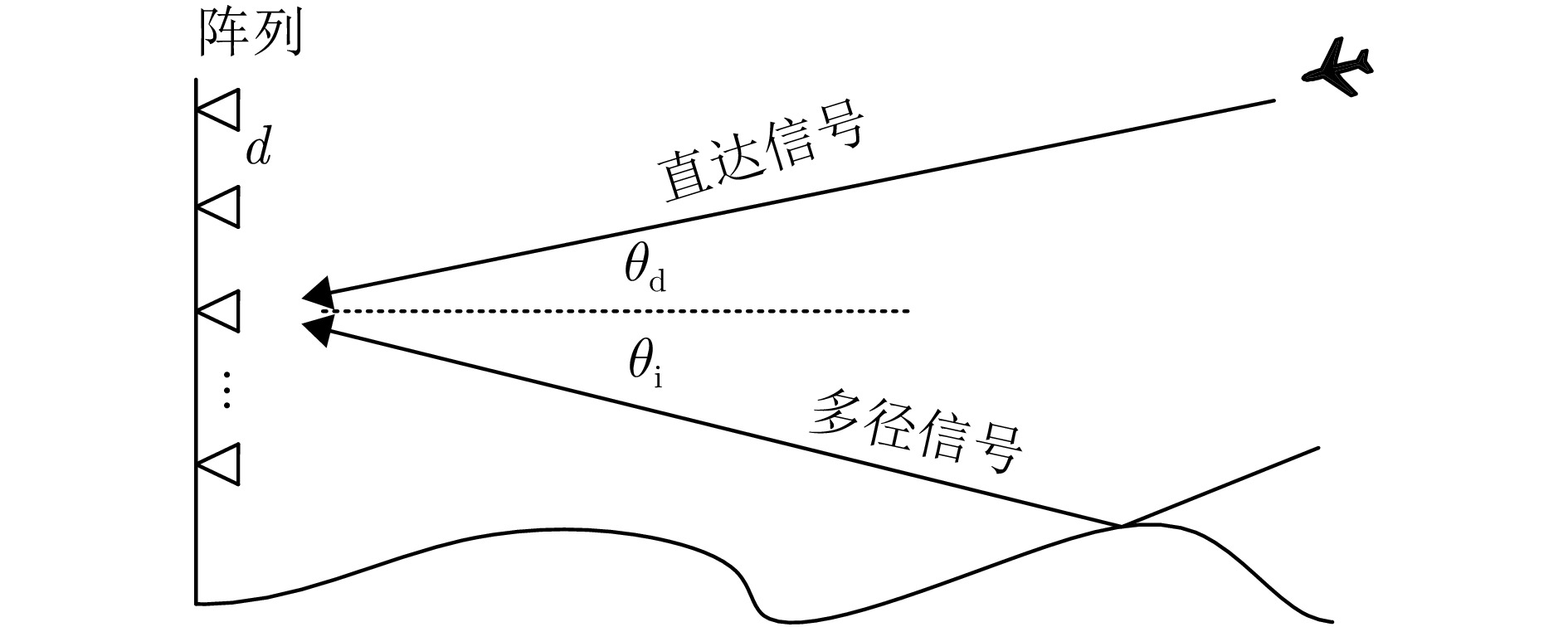
摘要: 米波雷达波束较宽,探测低仰角目标时多径信号严重影响直达信号的显著性,低仰角测角性能较差。针对此问题,该文提出了一种信号级特征博弈的多径抑制与高精度测角方法,构建一组直达信号提取器和直达信号特征检验器,直达信号提取器挖掘出多径信号湮没的直达信号,直达信号特征检验器用于鉴别、分析提取的直达信号的有效性,直达信号提取器和直达信号特征检验器相互博弈、优化,有效实现直达信号增强和多径信号抑制的效果,并利用已有的超分辨算法进行波达方向估计(DOA)。计算机仿真结果表明,所提算法不依赖于严格的目标角度信息,能够有效抑制多径信号,经典的超分辨算法在多种场景下的估计性能显著提升,且较已有的有监督学习模型而言,所提算法对未知的信号参数及多径分布模型具有更好的泛化性。Abstract: The meter-wave radar, known for its wide beamwidth, often faces challenges in detecting low-elevation targets due to interference from multipath signals. These reflected signals diminish the strength of the direct signal, leading to poor accuracy in low-elevation angle measurements. To solve this problem, this paper proposes a multipath suppression and high-precision angle measurement method. This method, based on a signal-level feature game approach, incorporates two interconnected components working together. The direct signal extractor mines the direct signal submerged within the multipath signal. The direct signal feature discriminator ensures the integrity and validity of the extracted direct signal. By continuously interacting and optimizing one another, these components suppress the multipath interference effectively and enhance the quality of the direct signal. The refined signal is then processed using advanced super-resolution algorithms to estimate the Direction of Arrival (DoA). Computer simulations have shown that the proposed algorithm achieves high performance without relying on strict target angle information, effectively suppressing multipath signals. This approach noticeably enhances the estimation accuracy of classic super-resolution algorithms. Compared to existing supervised learning models, the proposed algorithm offers better generalization to unknown signal parameters and multipath distribution models.
-
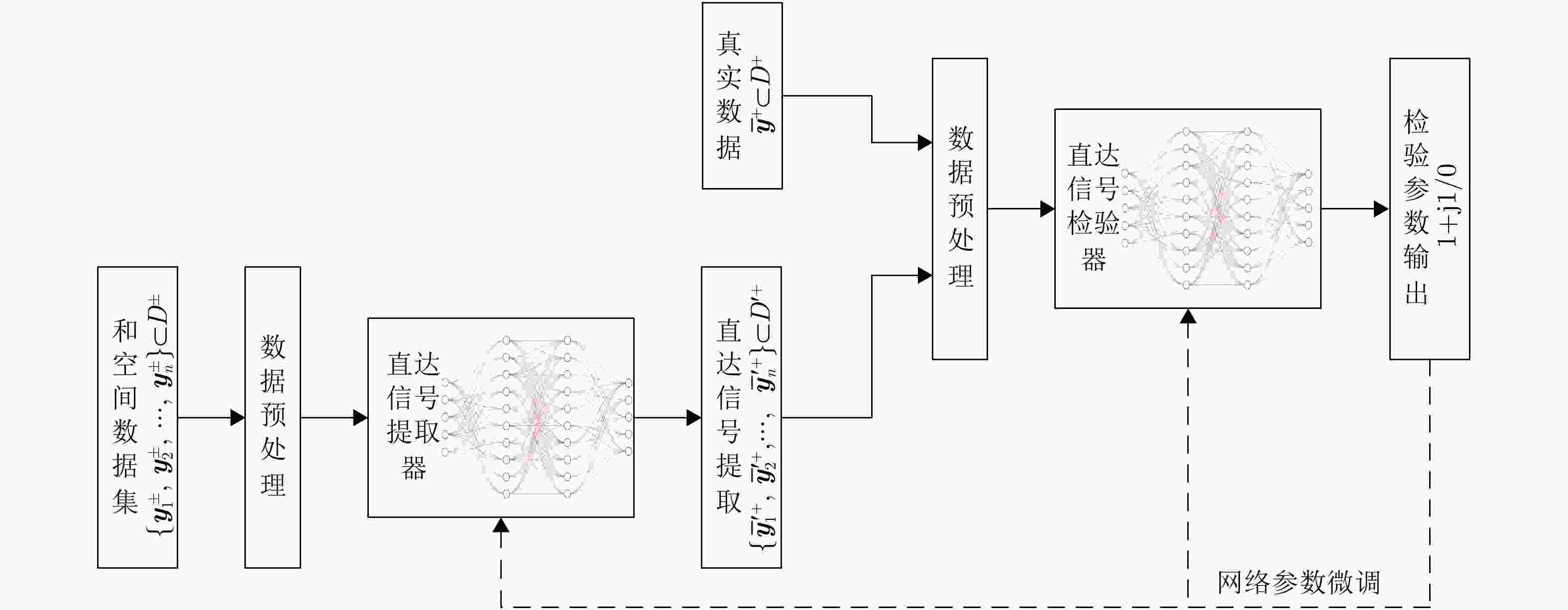
图 2 特征博弈预处理的多径抑制方法框图
Figure 2. A block diagram of multipath suppression method using feature game preprocessing
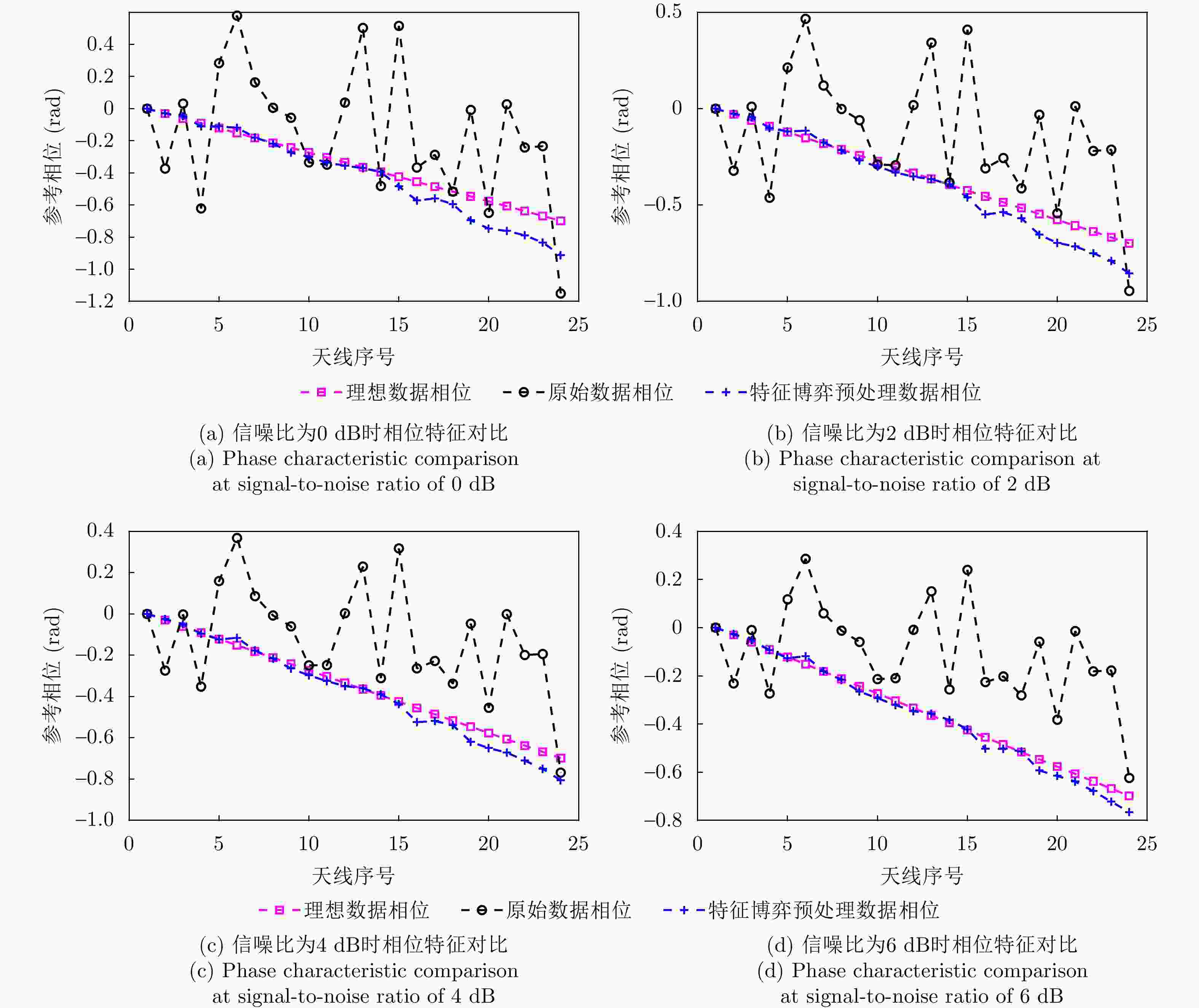
图 3 特征博弈预处理前后数据相位分布分析
Figure 3. Phase distribution analysis of data before and after feature game preprocessing
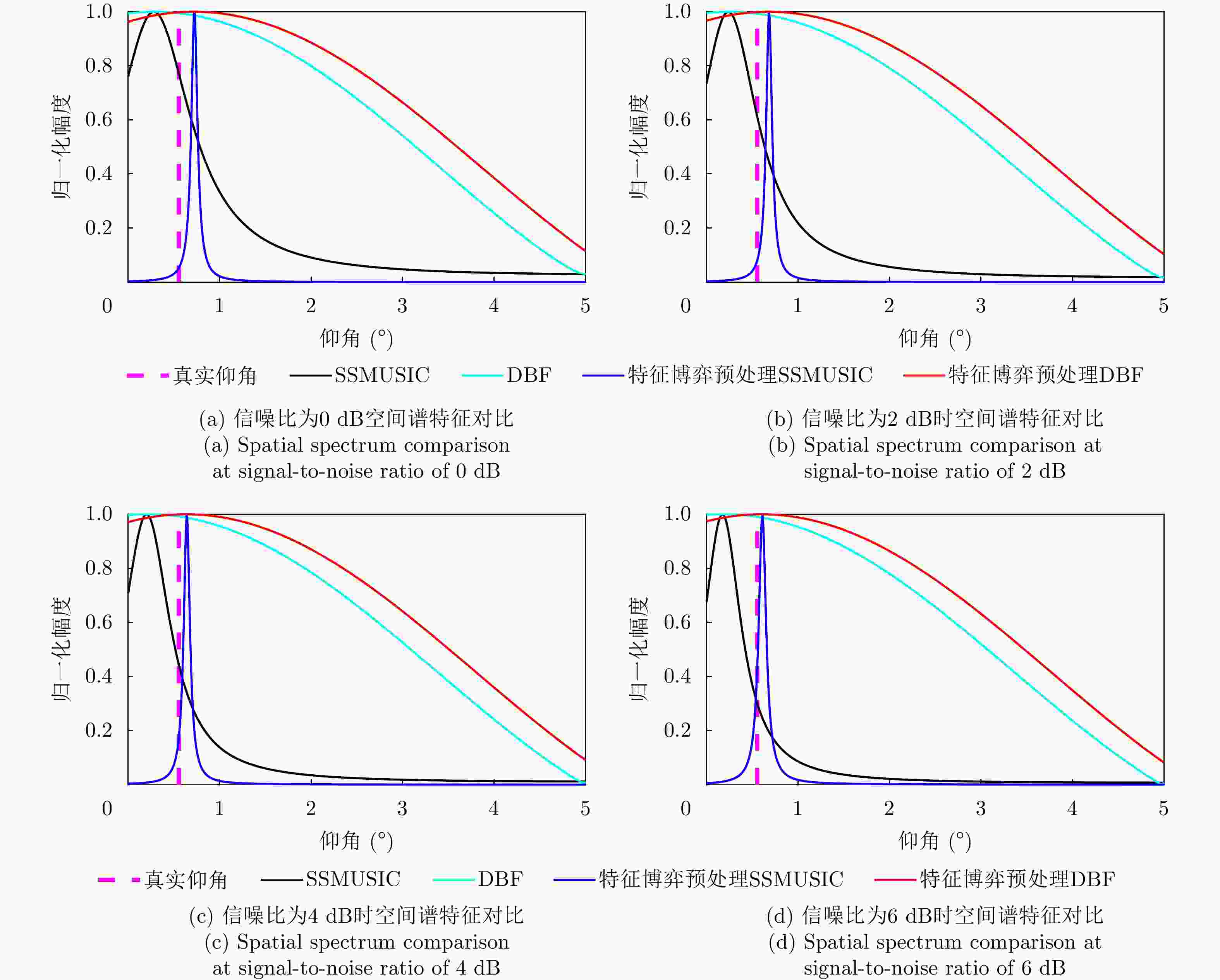
图 4 特征博弈预处理前后数据空间谱分析
Figure 4. Spatial spectrum analysis of data before and after feature game preprocessing
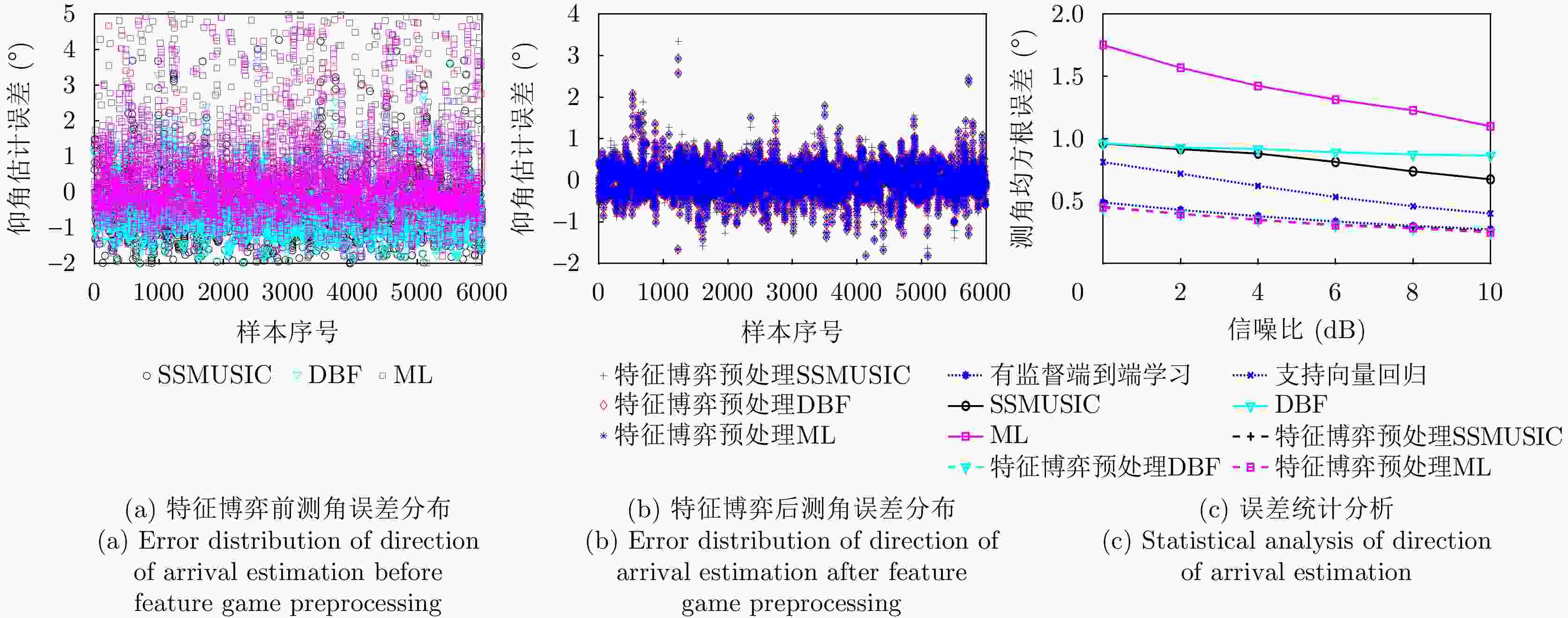
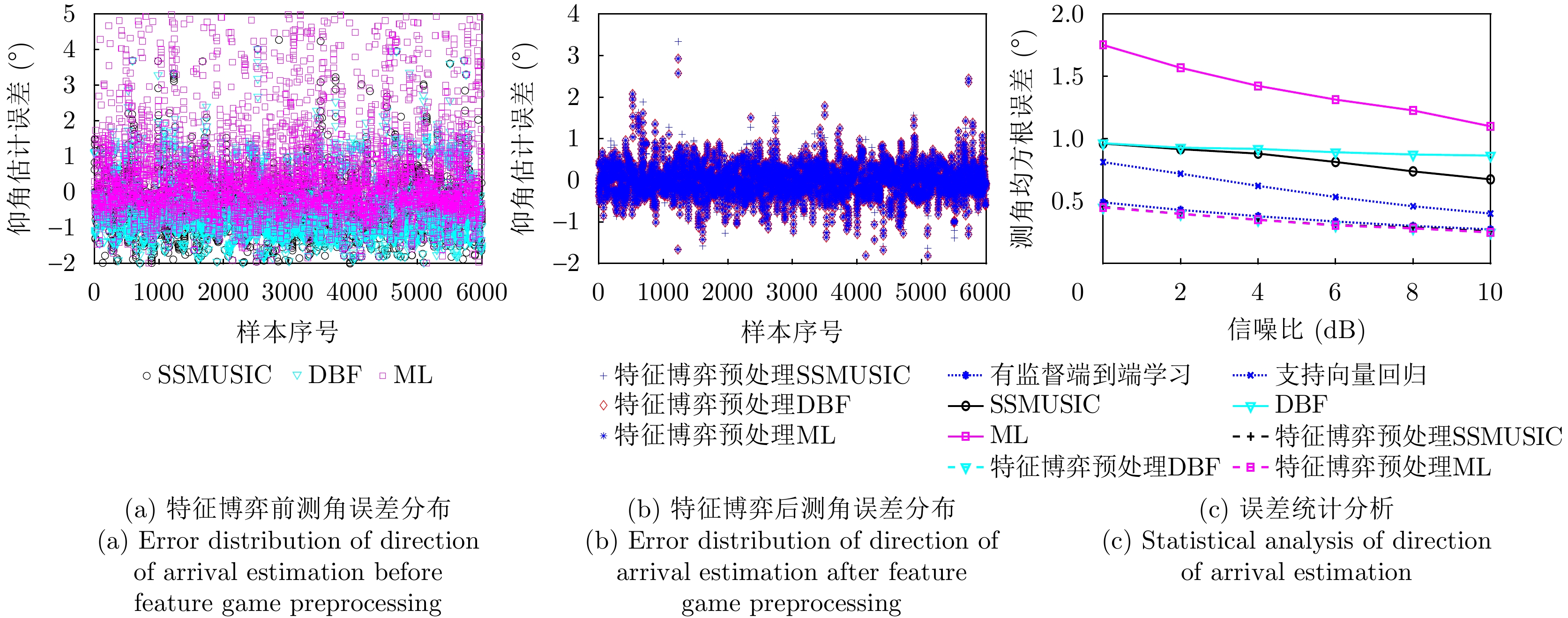
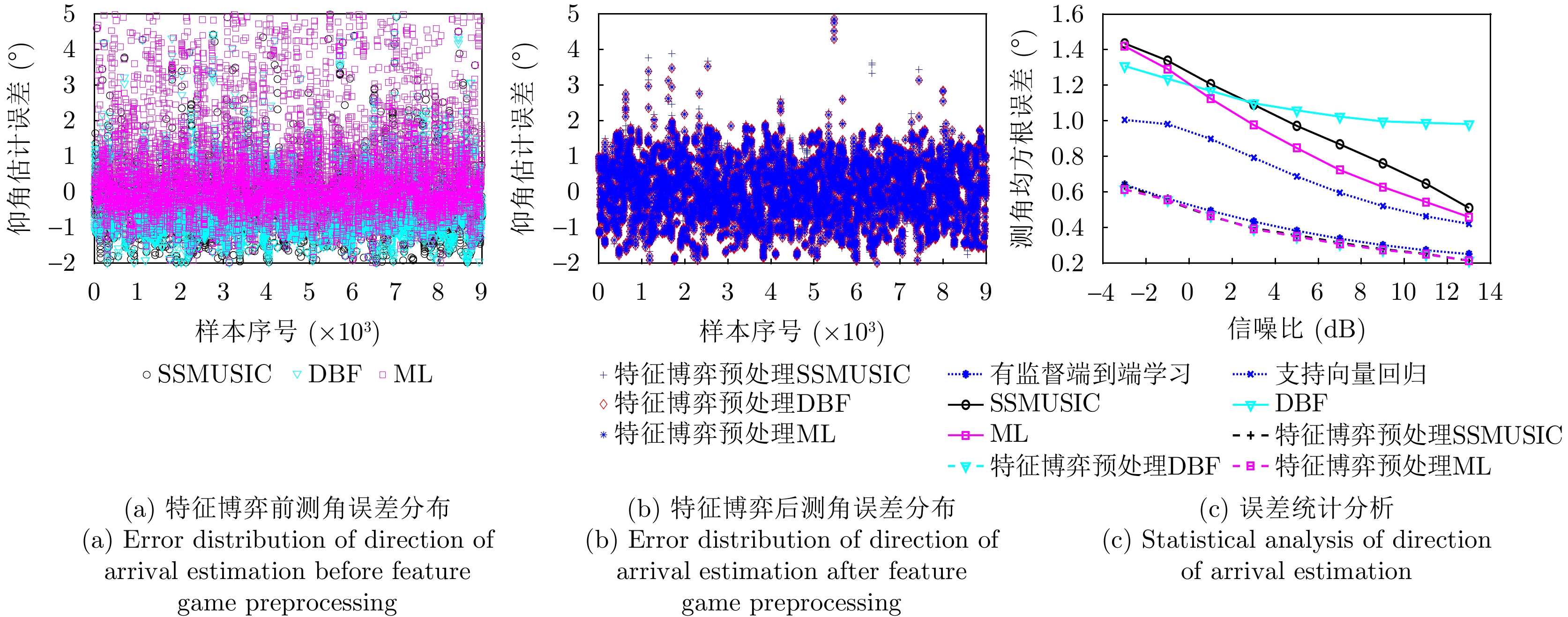
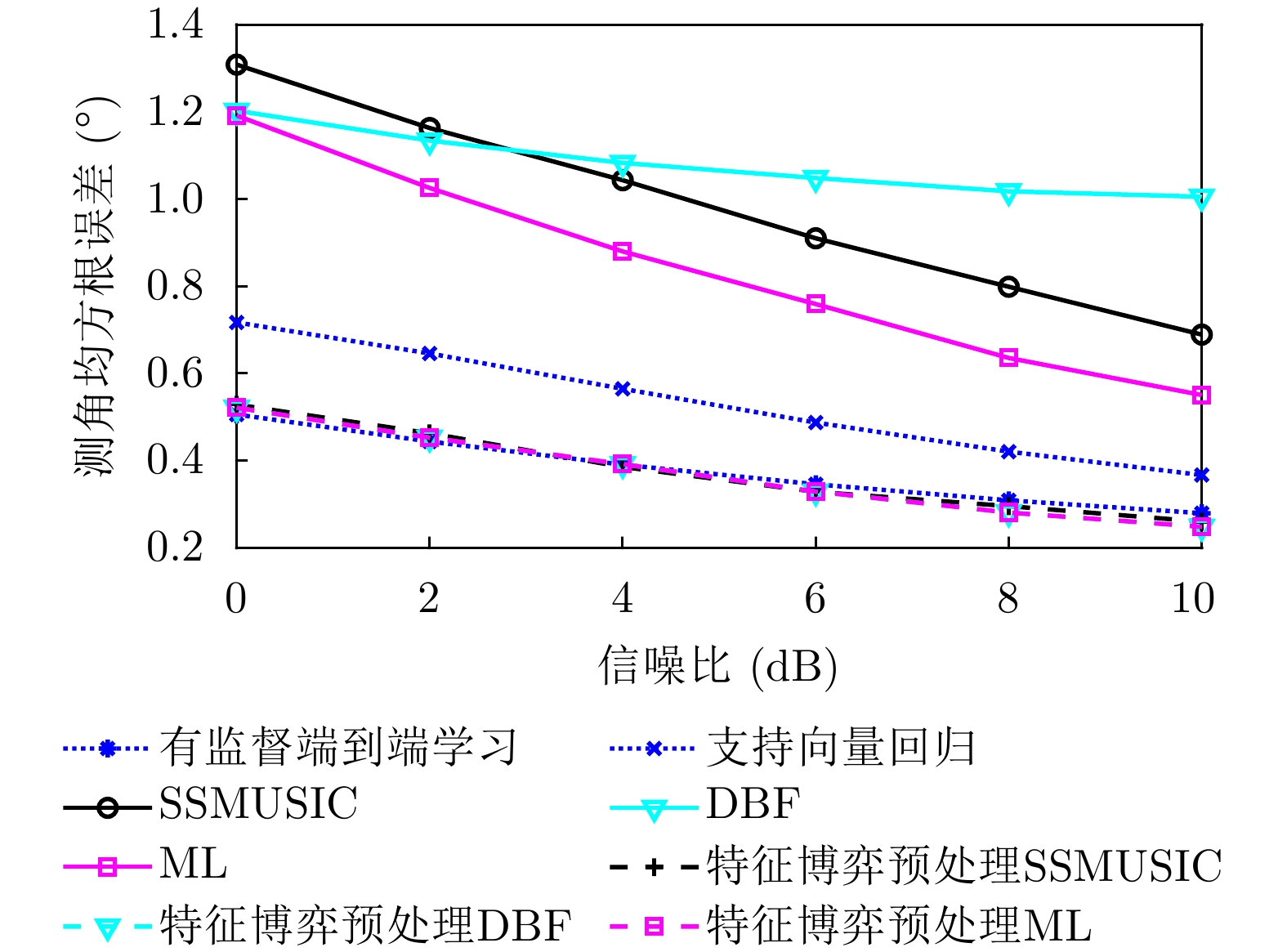
图 5 不同信噪比条件下测角误差分布和均方根误差对比
Figure 5. Error distribution of DOA estimation and root mean square error comparison under different SNR conditions
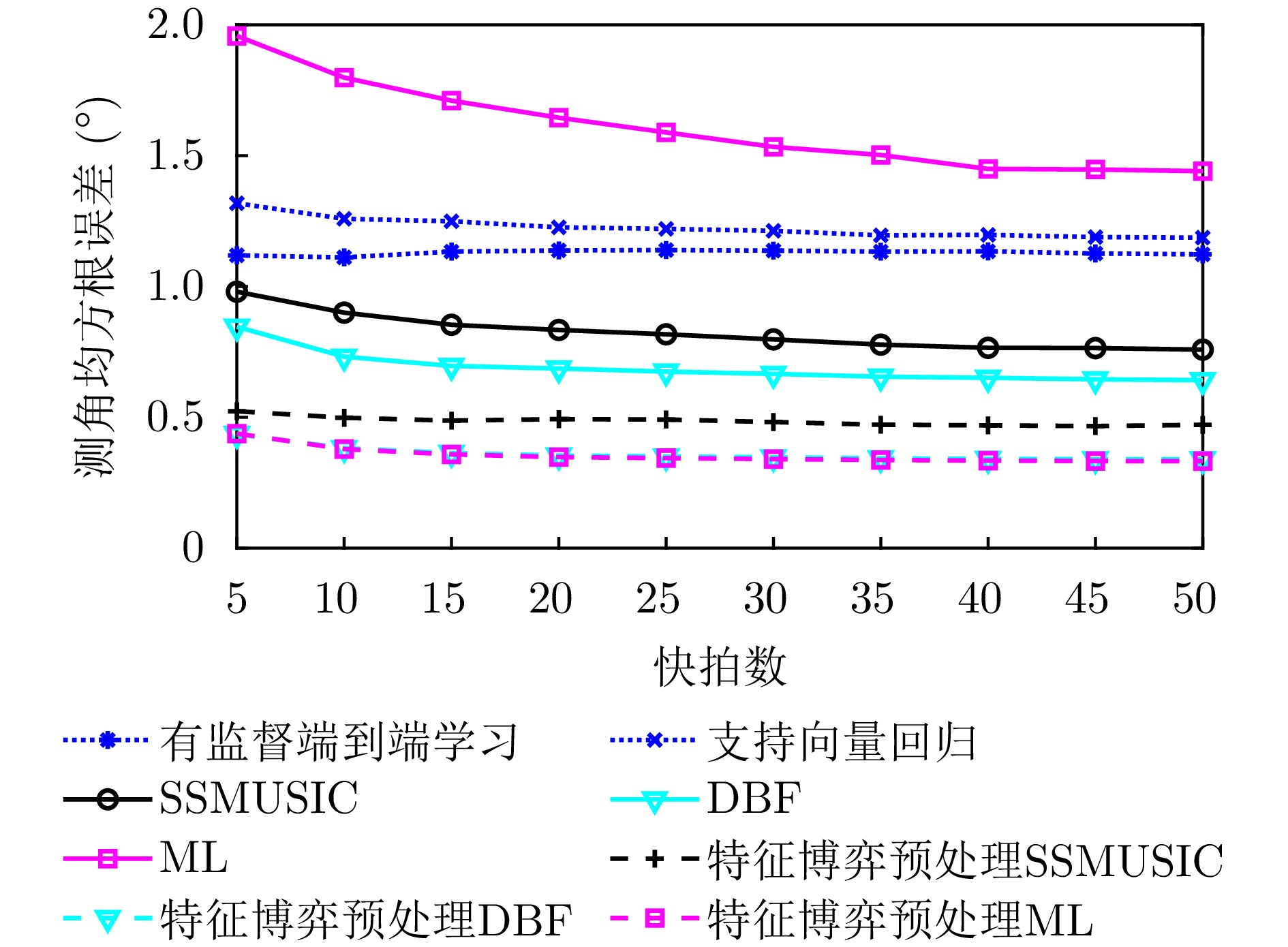
图 6 测角均方根误差与快拍数关系曲线
Figure 6. The relationship curve between root mean square error of direction of arrival estimation and number of snapshots
图 7 特征博弈预处理方法泛化性分析
Figure 7. Generalization analysis of feature game preprocessing method
-
[1] 吴剑旗. 先进米波雷达[M]. 北京: 国防工业出版社, 2015: 294.WU Jianqi. Advanced Metric Wave Radar[M]. Beijing: National Defense Industry Press, 2015: 294. [2] WU Jianqi, ZHU Wei, and CHEN Baixiao. Compressed sensing techniques for altitude estimation in multipath conditions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1891–1900. doi: 10.1109/TAES.2015.130841. [3] 王鸿帧, 郑桂妹, 陈晨, 等. 米波雷达低仰角估计技术分析与展望[J]. 火力与指挥控制, 2023, 48(11): 6–16. doi: 10.3969/j.issn.1002-0640.2023.11.002.WANG Hongzhen, ZHENG Guimei, CHEN Chen, et al. Analysis and prospect of low elevation estimation technology for meter wave radar[J]. Fire Control & Command Control, 2023, 48(11): 6–16. doi: 10.3969/j.issn.1002-0640.2023.11.002. [4] 郑轶松, 陈伯孝. 米波雷达低仰角目标多径模型及其反演方法研究[J]. 电子与信息学报, 2016, 38(6): 1468–1474. doi: 10.11999/JEIT151013.ZHENG Yisong and CHEN Baixiao. Multipath model and inversion method for low-angle target in very high frequency radar[J]. Journal of Electronics & Information Technology, 2016, 38(6): 1468–1474. doi: 10.11999/JEIT151013. [5] SCHMIDT R. Multiple emitter location and signal parameter estimation[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3): 276–280. doi: 10.1109/TAP.1986.1143830. [6] ROY R and KAILATH T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(7): 984–995. doi: 10.1109/29.32276. [7] ZISKIND I and WAX M. Maximum likelihood localization of diversely polarized sources by simulated annealing[J]. IEEE Transactions on Antennas and Propagation, 1990, 38(7): 1111–1114. doi: 10.1109/8.55625. [8] LE JEUNE D, JARRY P, SALAUN A, et al. Performance evaluation of Marple modified FBLP and MINNORM methods for angle of arrival estimation using real multipath active sonar data[C]. The Fifth ASSP Workshop on Spectrum Estimation and Modeling, Rochester, USA, 1990: 352–356. doi: 10.1109/SPECT.1990.205606. [9] PAN Jingjing, SUN Meng, WANG Yide, et al. Simplified spatial smoothing for DOA estimation of coherent signals[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 70(2): 841–845. doi: 10.1109/TCSII.2022.3214321. [10] ZISKIND I and WAX M. Maximum likelihood localization of multiple sources by alternating projection[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1988, 36(10): 1553–1560. doi: 10.1109/29.7543. [11] 项厚宏. 基于深度学习的米波雷达阵列超分辨DOA估计方法研究[D]. [博士论文], 西安电子科技大学, 2021. doi: 10.27389/d.cnki.gxadu.2021.000059.XIANG Houhong. Study on super-resolution DOA estimation methods based on deep learning for VHF radar[D]. [Ph.D. dissertation], Xidian University, 2021. doi: 10.27389/d.cnki.gxadu.2021.000059. [12] 李存勖. 米波雷达低仰角测高相关问题研究[D]. [博士论文], 西安电子科技大学, 2018.LI Cunxu. Study on some issues of altitude measurement of low-angle target for VHF array radar[D]. [Ph.D. dissertation], Xidian University, 2018. [13] 朱伟. 米波数字阵列雷达低仰角测高方法研究[D]. [博士论文], 西安电子科技大学, 2013.ZHU Wei. Study on low-angle altitude measurement in VHF radar[D]. [Ph.D. dissertation], Xidian University, 2013. [14] 李妙歌, 陈渤, 王东升, 等. 面向SAR图像目标分类的CNN模型可视化方法[J]. 雷达学报(中英文), 2024, 13(2): 359–373. doi: 10.12000/JR23107.LI Miaoge, CHEN Bo, WANG Dongsheng, et al. CNN model visualization method for SAR image target classification[J]. Journal of Radars, 2024, 13(2): 359–373. doi: 10.12000/JR23107. [15] 张群, 胡健, 罗迎, 等. 微动目标雷达特征提取、成像与识别研究进展[J]. 雷达学报, 2018, 7(5): 531–547. doi: 10.12000/JR18049.ZHANG Qun, HU Jian, LUO Ying, et al. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions[J]. Journal of Radars, 2018, 7(5): 531–547. doi: 10.12000/JR18049. [16] 牟效乾, 陈小龙, 关键, 等. 基于INet的雷达图像杂波抑制和目标检测方法[J]. 雷达学报, 2020, 9(4): 640–653. doi: 10.12000/JR20090.MOU Xiaoqian, CHEN Xiaolong, GUAN Jian, et al. Clutter suppression and marine target detection for radar images based on INet[J]. Journal of Radars, 2020, 9(4): 640–653. doi: 10.12000/JR20090. [17] XU Xiaoxuan and HUANG Qinghua. MD-DOA: A model-based deep learning DOA estimation architecture[J]. IEEE Sensors Journal, 2024, 24(12): 20240–20253. doi: 10.1109/JSEN.2024.3396337. [18] LABBAF N, DALILI OSKOUEI H R, and ABEDI M R. Robust DOA estimation in a uniform circular array antenna with errors and unknown parameters using deep learning[J]. IEEE Transactions on Green Communications and Networking, 2023, 7(4): 2143–2152. doi: 10.1109/TGCN.2023.3294448. [19] YU Jiarun and WANG Yafeng. Deep learning-based multipath DoAs estimation method for mmWave massive MIMO systems in low SNR[J]. IEEE Transactions on Vehicular Technology, 2023, 72(6): 7480–7490. doi: 10.1109/TVT.2023.3239402. [20] LIU Zhangmeng, ZHANG Chenwei, and YU P S. Direction-of-arrival estimation based on deep neural networks with robustness to array imperfections[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(12): 7315–7327. doi: 10.1109/TAP.2018.2874430. [21] WU Liuli and HUANG Zhitao. Coherent SVR learning for wideband direction-of-arrival estimation[J]. IEEE Signal Processing Letters, 2019, 26(4): 642–646. doi: 10.1109/LSP.2019.2901641. -

 下载:
下载:

计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

