
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Distributed Radar Main-lobe Interference Suppression Method Via Joint Optimization of Array Configuration and Subarray Element Number
-
摘要: 针对单基雷达无法有效抑制伴随式主瓣压制干扰的问题,可通过部署稀疏辅助阵形成等效大孔径阵列,从空域上将主瓣干扰与目标进行分离,但该方法易形成空域栅瓣。针对以上问题,该文提出了一种基于阵列构型与阵元数量双参数迭代优化框架,该框架由阵列构型优化与子阵阵元数量优化两部分组成,其中阵列构型优化固定子阵阵元数量,基于最小方差无失真响应准则在主瓣干扰方向形成零陷,利用改进自适应遗传粒子群算法在孔径尺寸、子阵最小间距和主瓣干扰方向零陷深度等约束条件下优化阵列构型,抑制波束栅瓣;子阵阵元数量优化通过改进自适应遗传粒子群算法在有限子阵阵元数量、主瓣干扰方向零陷深度等约束条件下优化子阵阵元数量,进一步抑制波束栅瓣。此外,通过数值仿真验证了相同参数条件下阵列构型与阵元数量双参数迭代优化框架的有效性。最后,针对典型分布式机动平台协同探测场景,探索了主瓣干扰抑制和栅瓣抑制性能边界。
-
关键词:
- 分布式雷达 /
- 主瓣干扰抑制 /
- 栅瓣抑制 /
- 双参数迭代优化框架 /
- 改进自适应遗传粒子群算法
Abstract: To address the ineffectiveness of single-base radar in suppressing adjoint main-lobe interference, an equivalent large-aperture array can be designed by deploying sparse auxiliary arrays to separate main-lobe interference from targets in the spatial domain. However, this method is prone to generating spatial grating lobes. To overcome this problem, this study proposes a dual-parameter iterative optimization framework comprising two parts: array configuration optimization and subarray element number optimization. Array configuration optimization caters to the number of subarray elements and creates nulls in the main-lobe interference direction on the basis of the minimum variance distortionless response criterion. To suppress grating lobes of the beam an improved adaptive genetic particle swarm algorithm is used to optimize the array configuration under constraints, such as aperture size, minimum subarray spacing, and null depth in the main-lobe interference direction. Subarray element number optimization uses the above-mentioned algorithm to optimize the number of subarray elements under constraints, such as a limited number of subarray elements and null depth in the main-lobe interference direction, further suppressing beam grating lobes. Finally, numerical simulations confirmed the effectiveness of the dual-parameter iterative optimization framework for array configuration and element number under the same parameter conditions. Additionally, this study explores the performance boundaries of main-lobe interference suppression and grating lobe suppression for typical distributed mobile platform cooperative detection scenarios. -
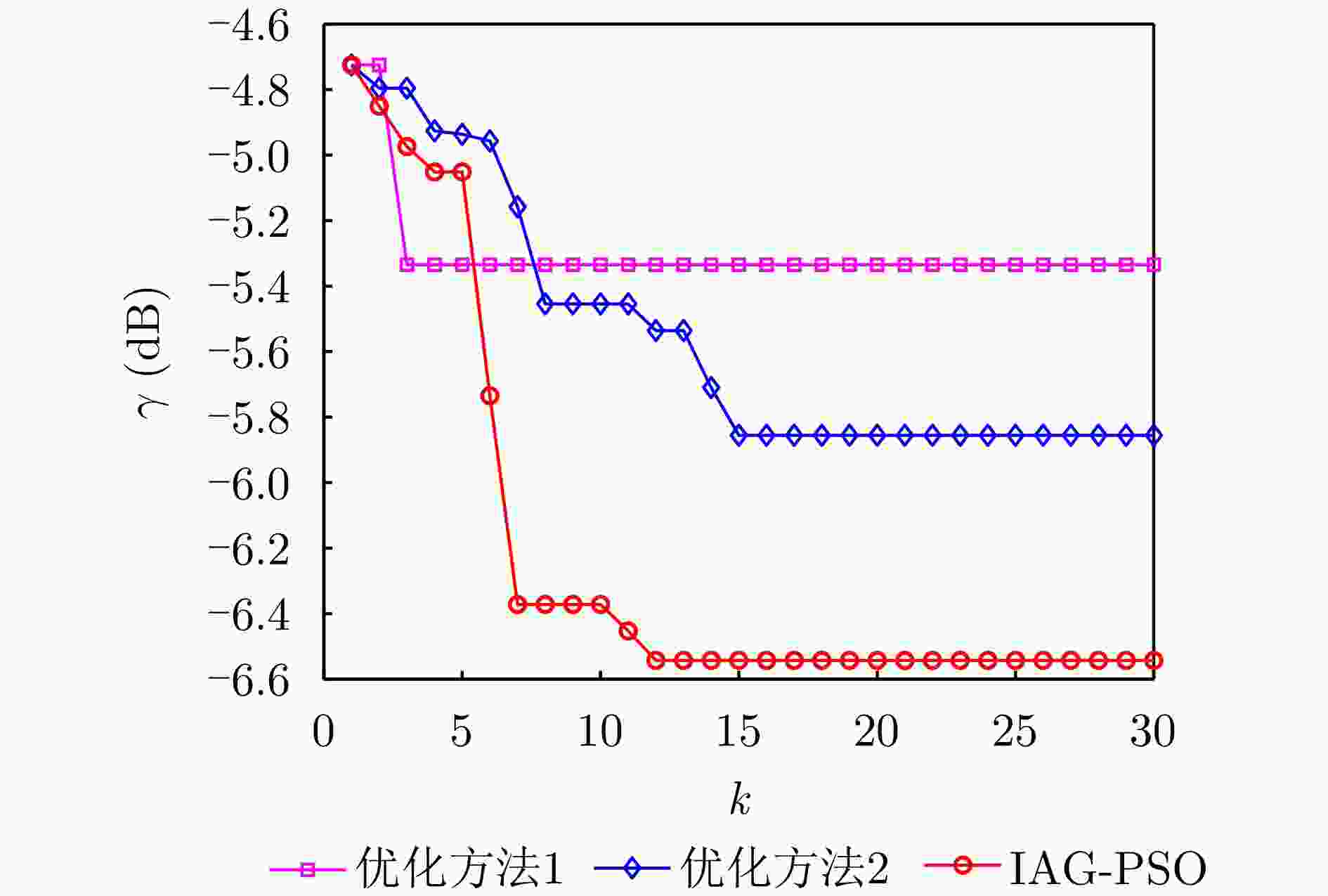
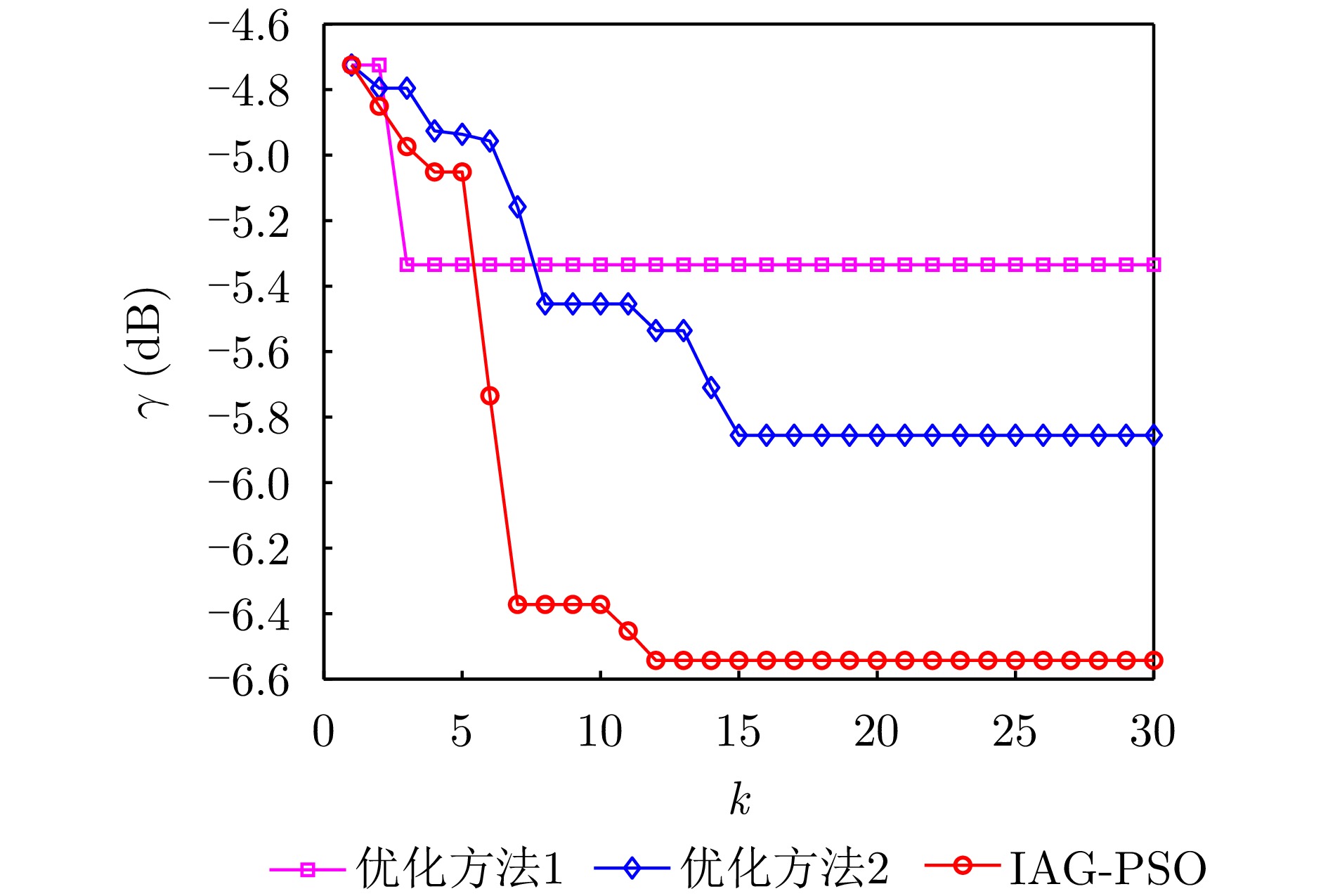
图 5 3种算法$ \gamma $与迭代次数k变化
Figure 5. $ \gamma $ versus iteration number k for three algorithms
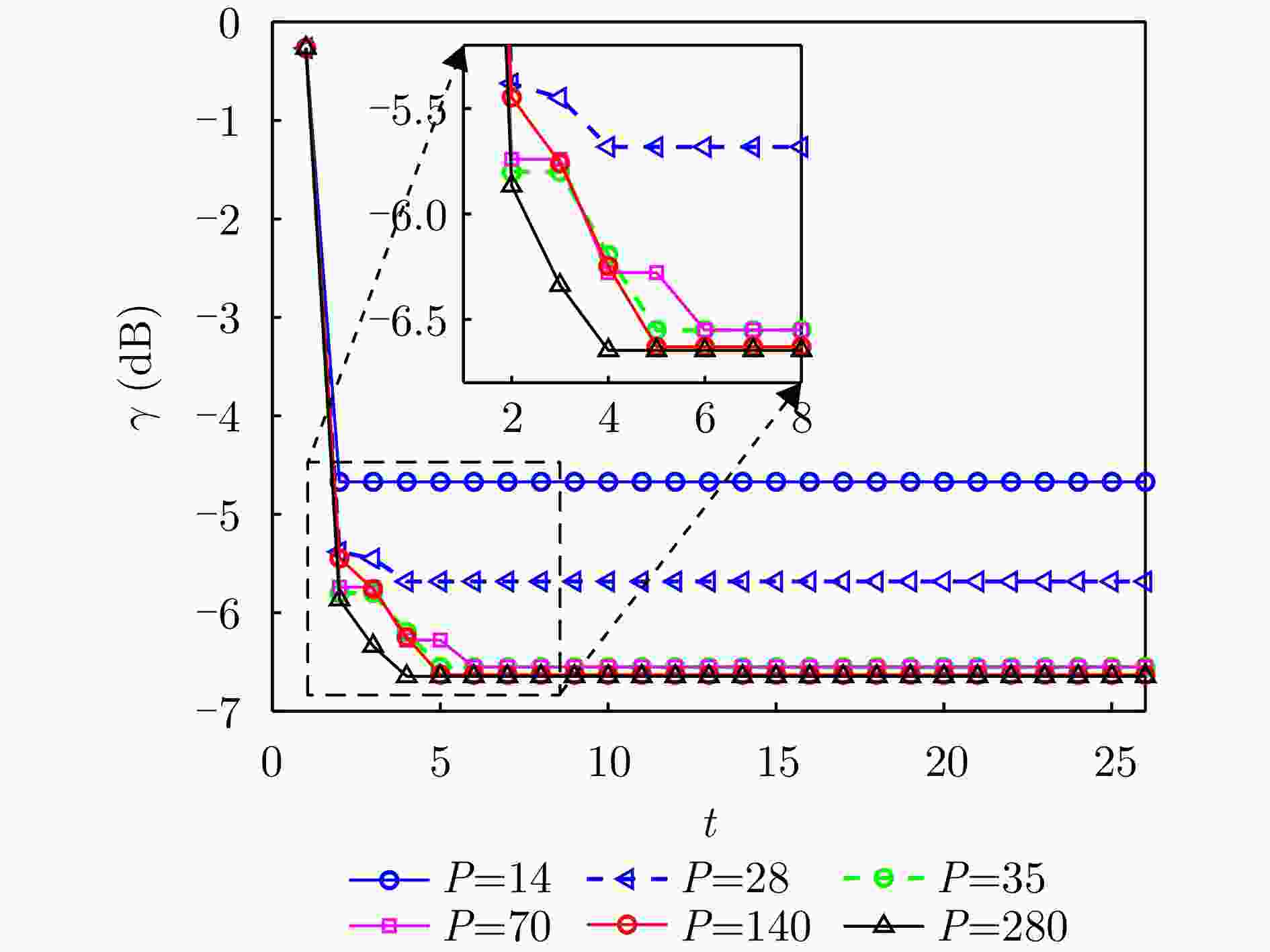
图 6 不同P下$ \gamma $与迭代次数t关系
Figure 6. $ \gamma $ versus iteration number t for different P
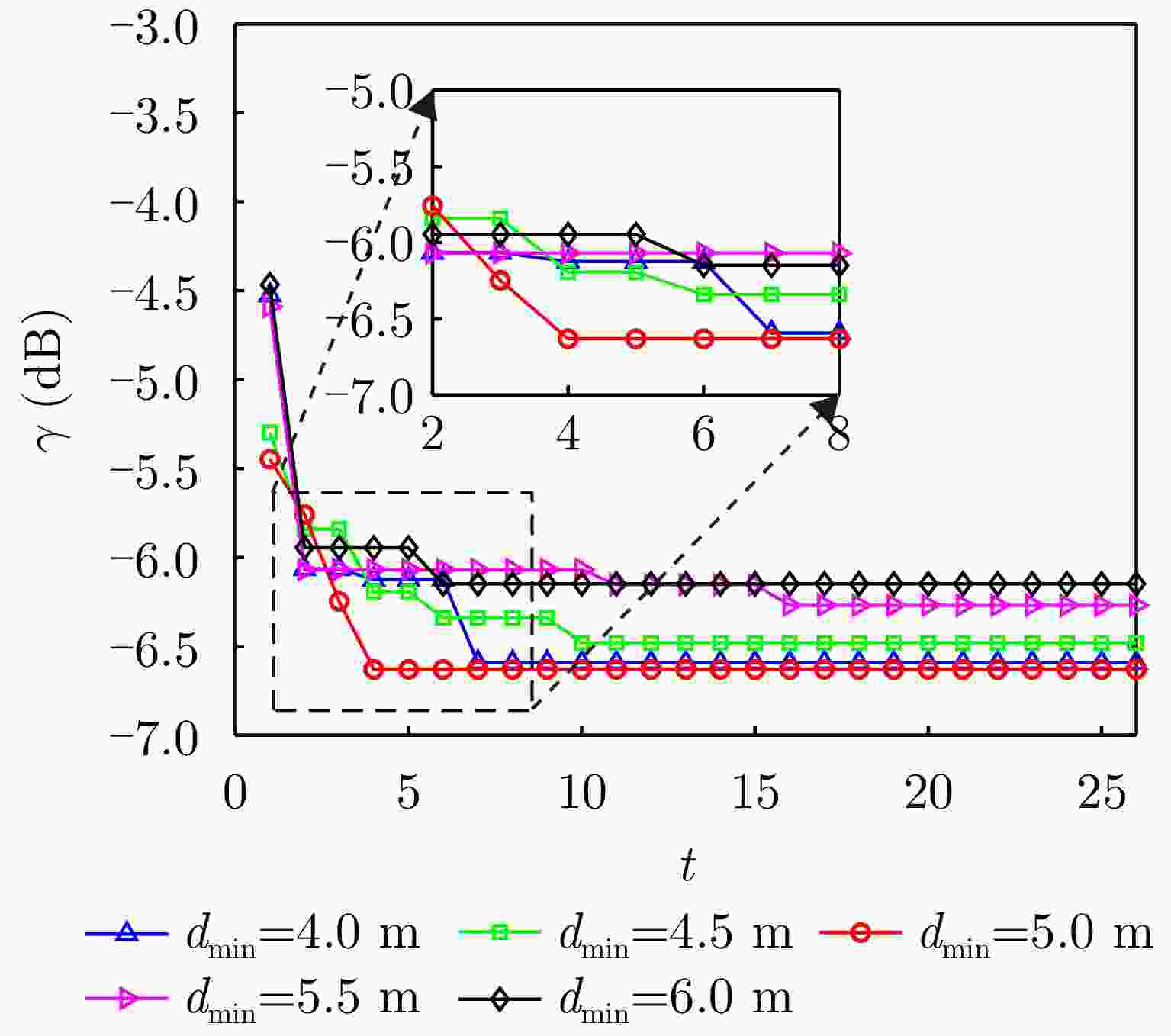
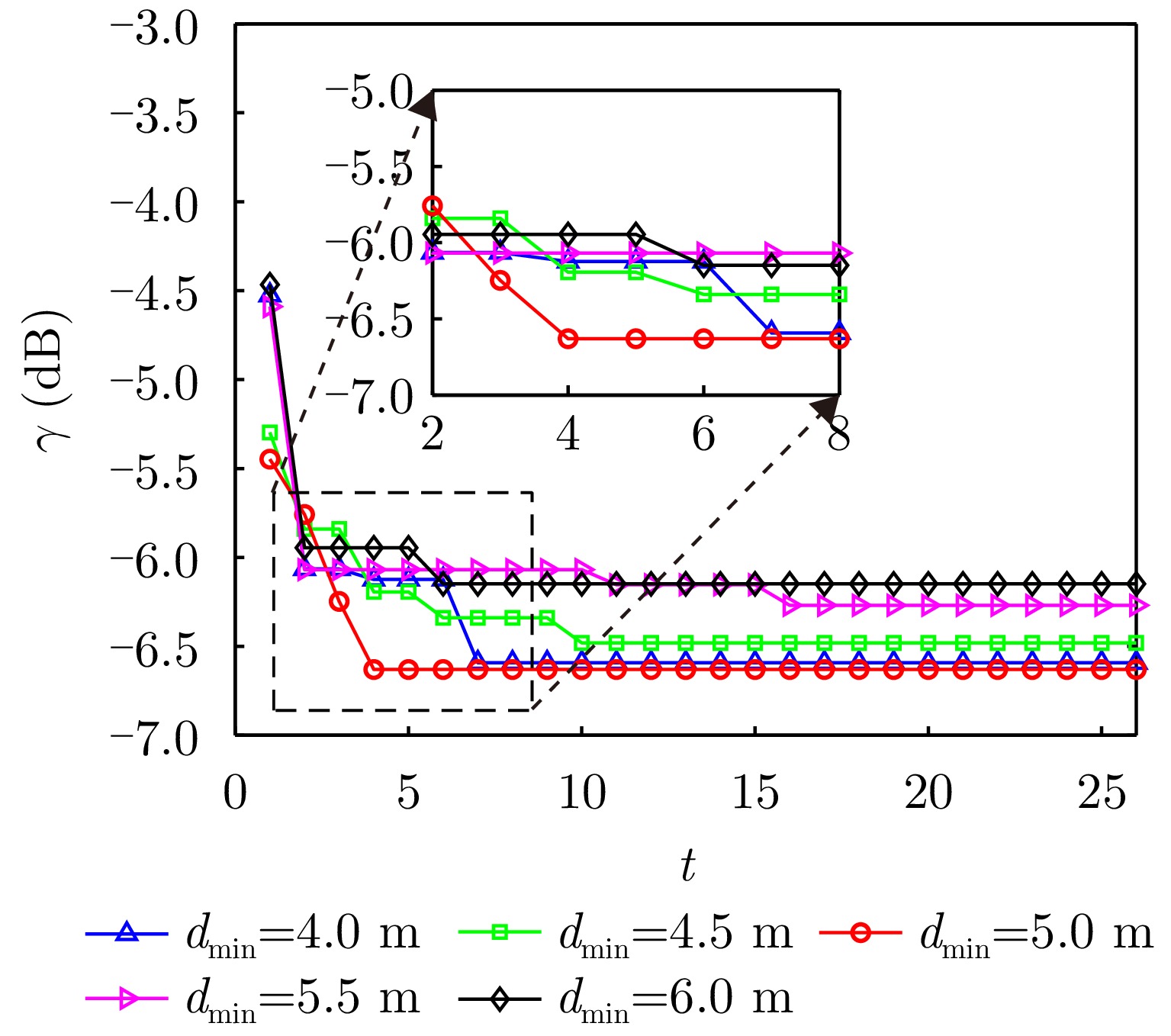
图 7 不同$ {d_{\min }} $下$ \gamma $与迭代次数t关系
Figure 7. $ \gamma $ versus iteration number t for different $ {d_{\min }} $
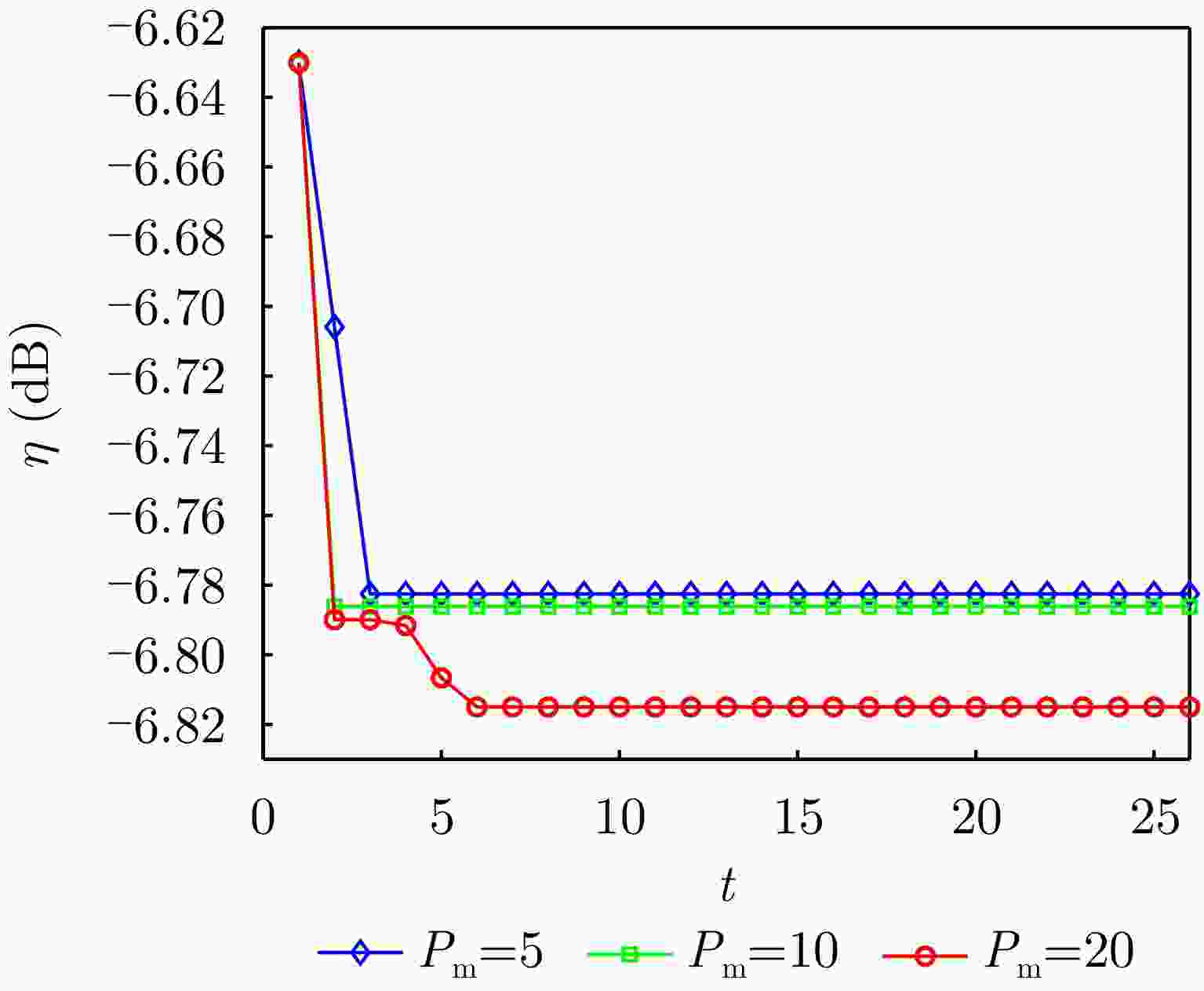
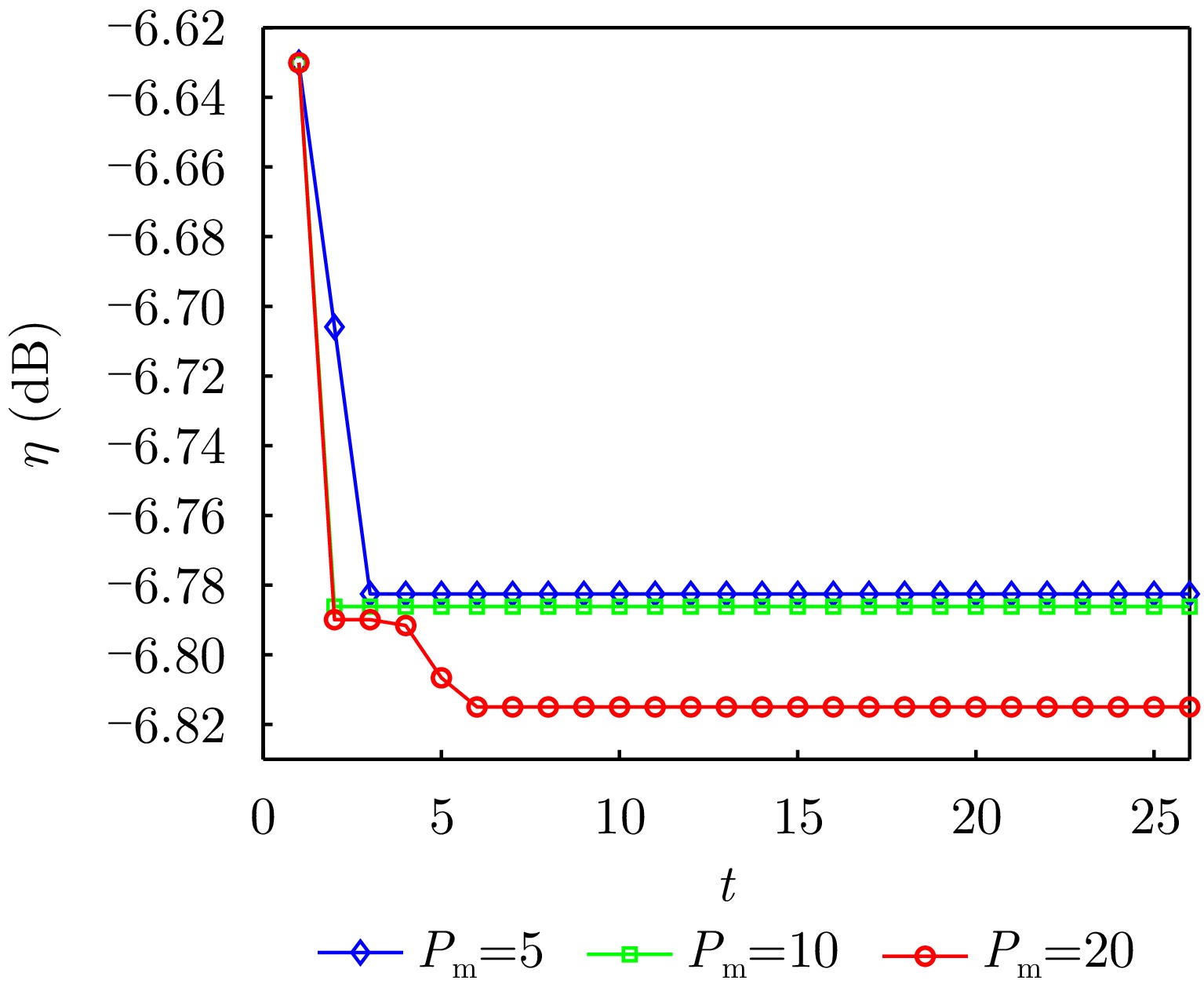
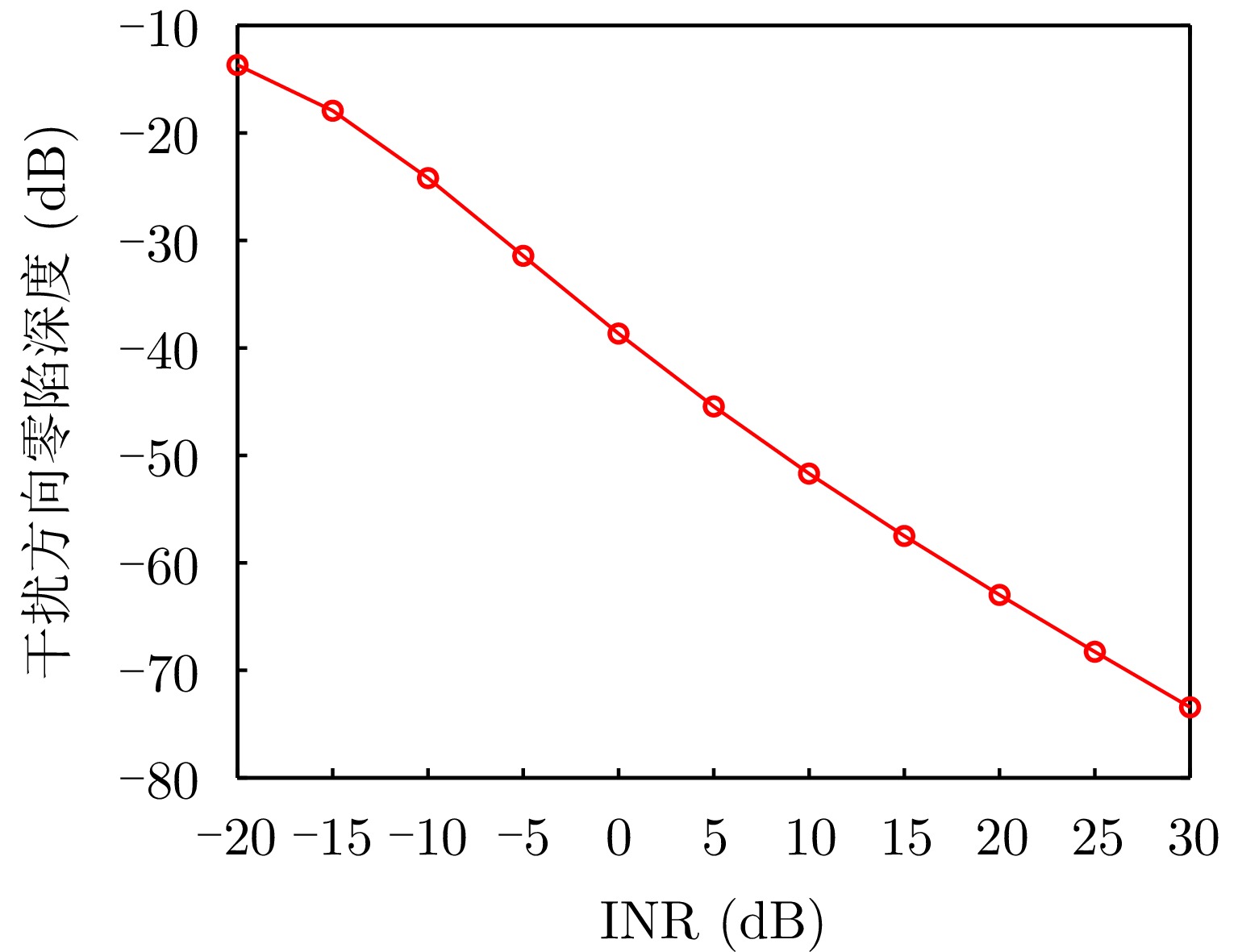
图 8 不同$ {P_{\text{m}}} $下$ \eta $与优化次数t关系
Figure 8. $ \eta $ versus iteration number t for different $ {P_{\text{m}}} $
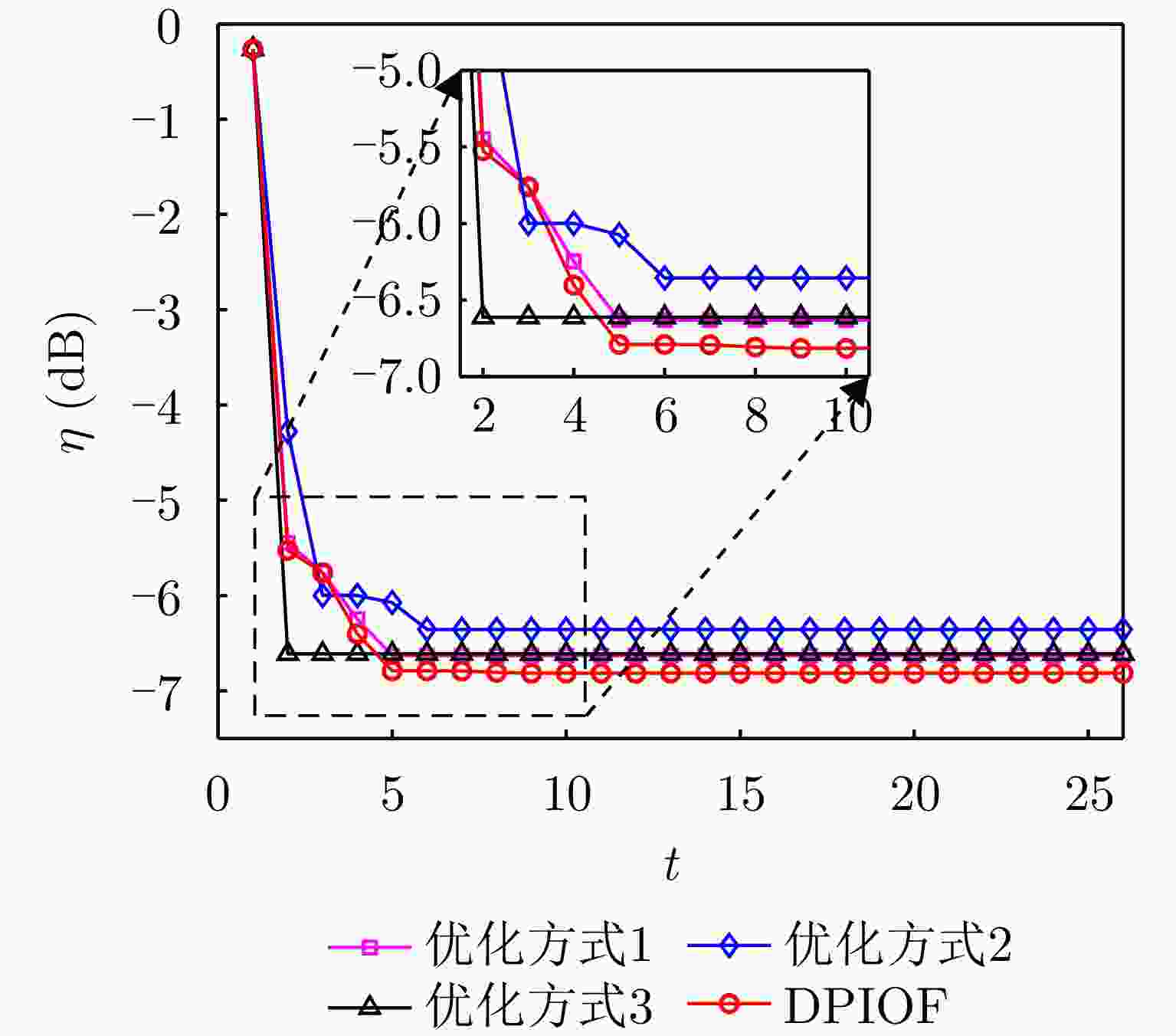
图 9 不同优化方式$ \eta $与迭代次数t关系
Figure 9. $ \eta $ versus iteration number t for different optimization methods
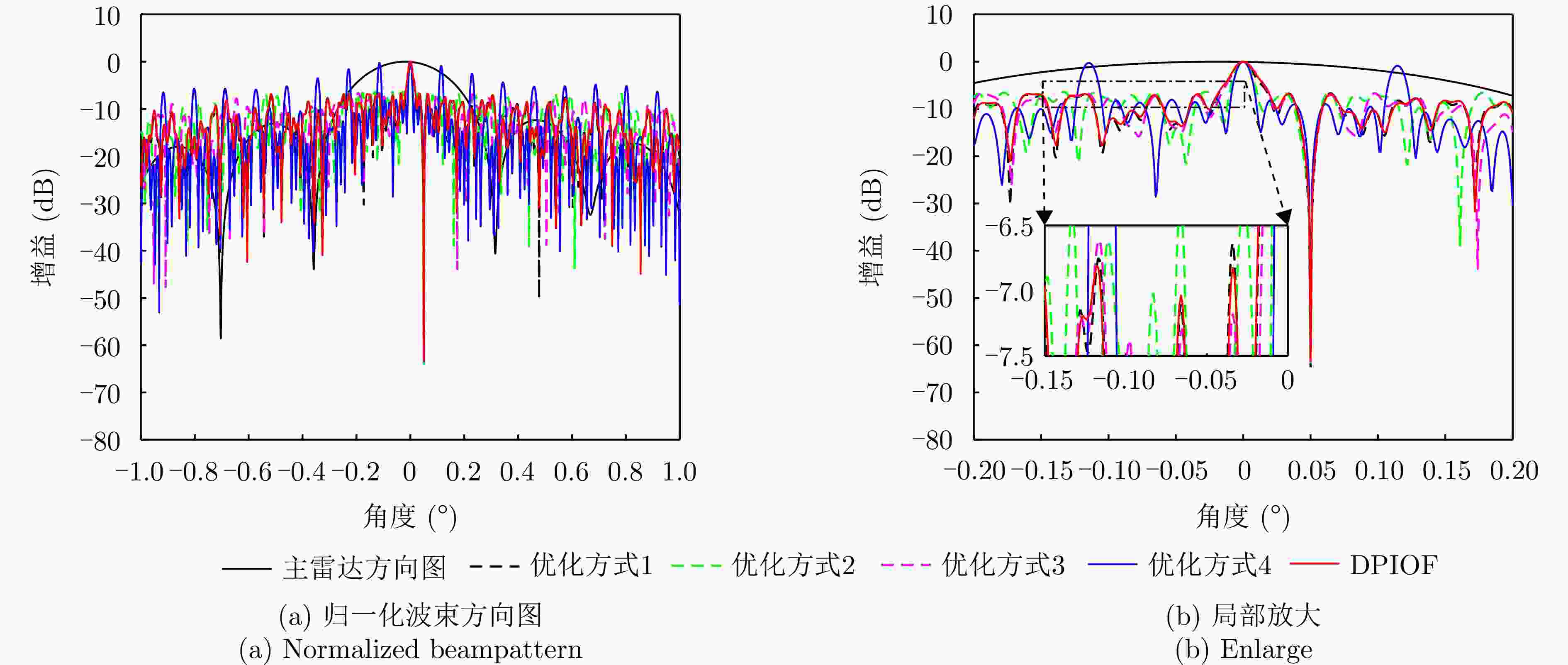
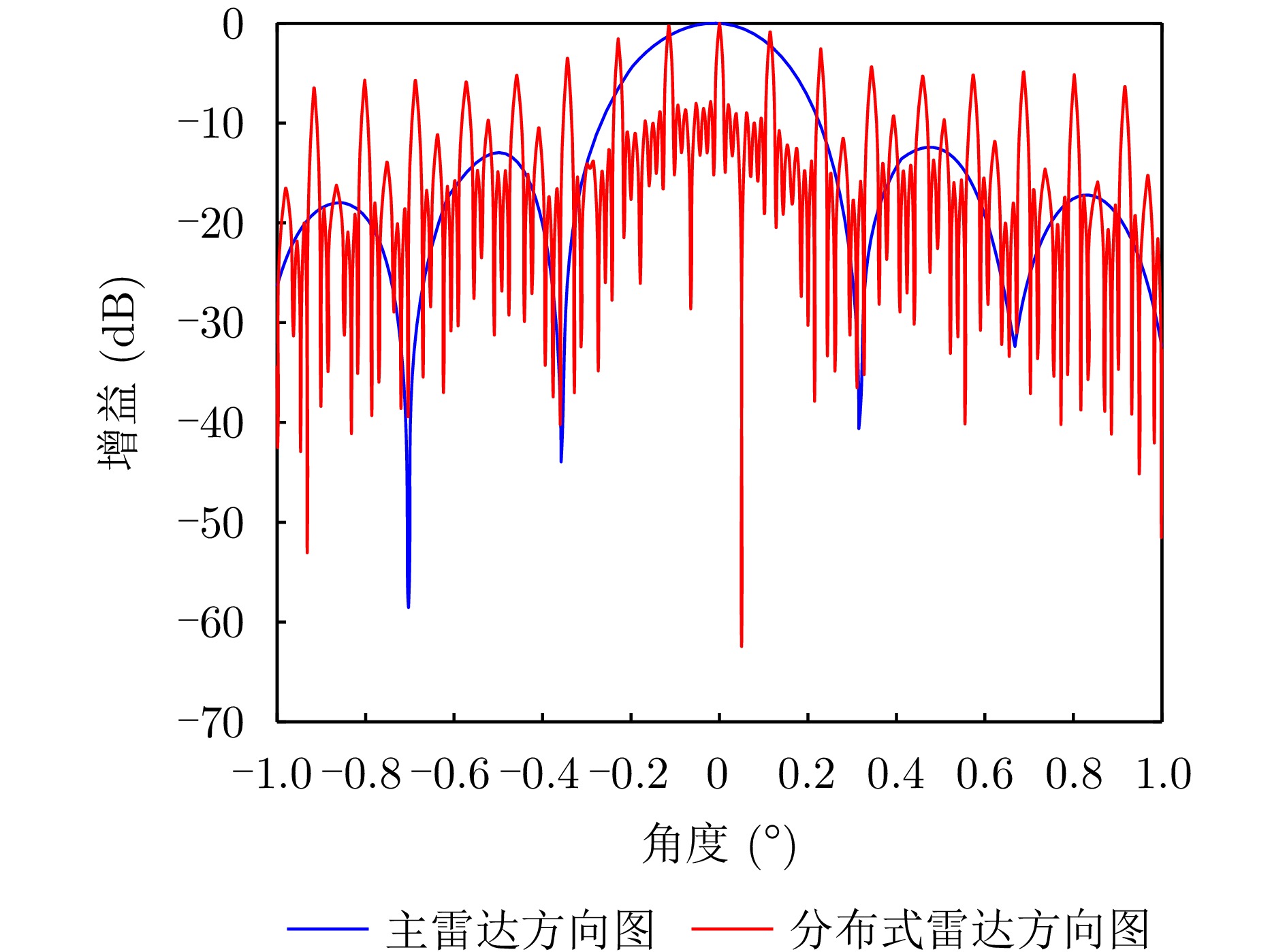
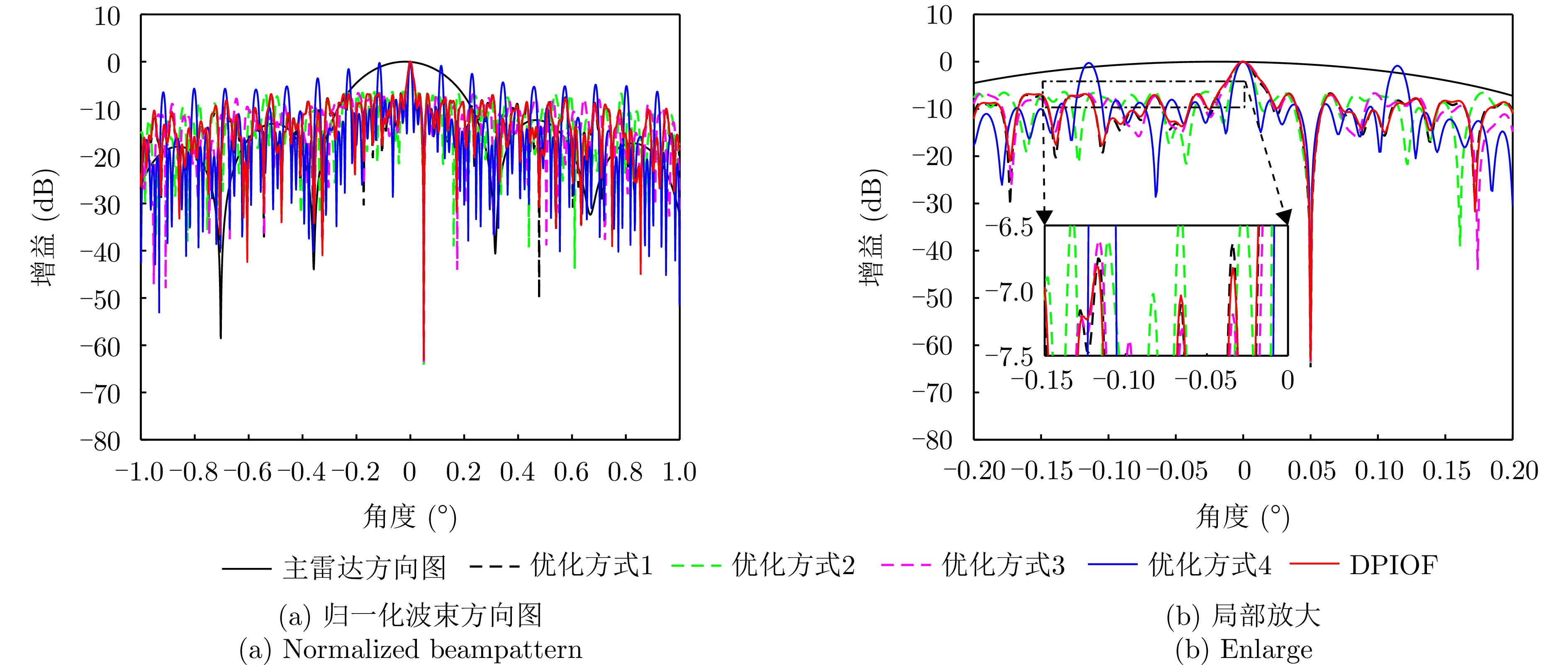
图 10 不同优化方式归一化方向图
Figure 10. Normalized beampattern for different optimization methods
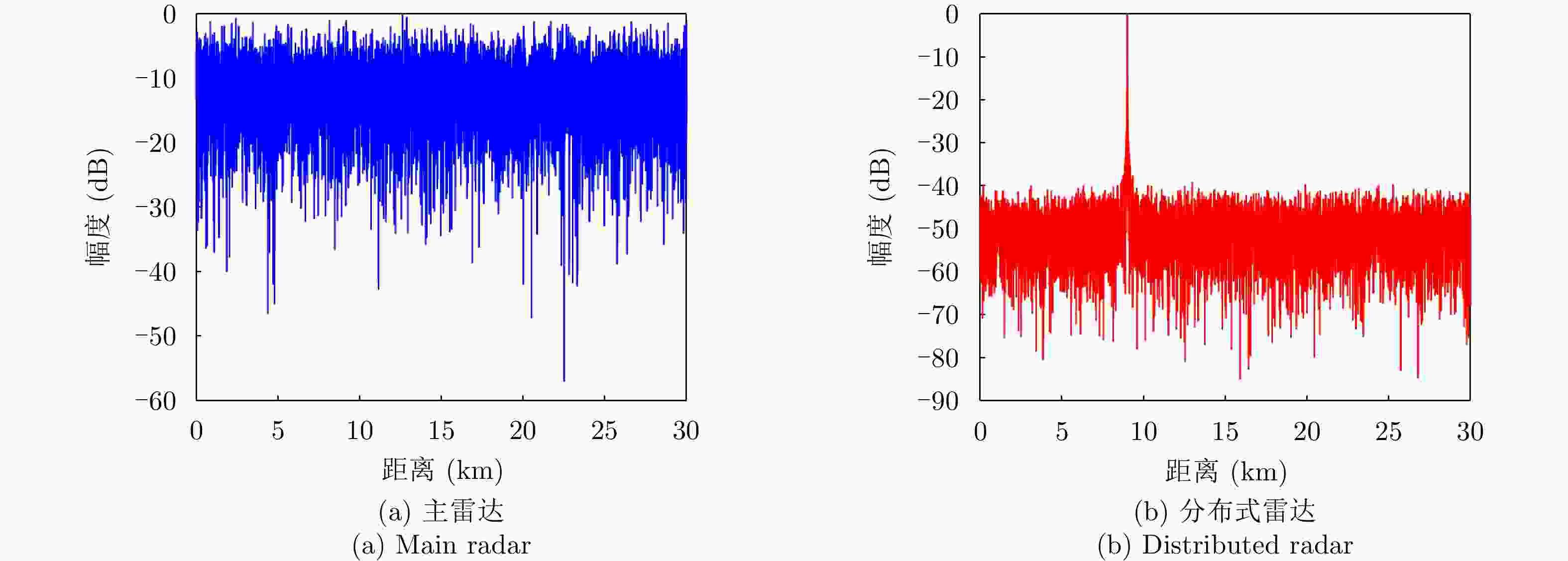
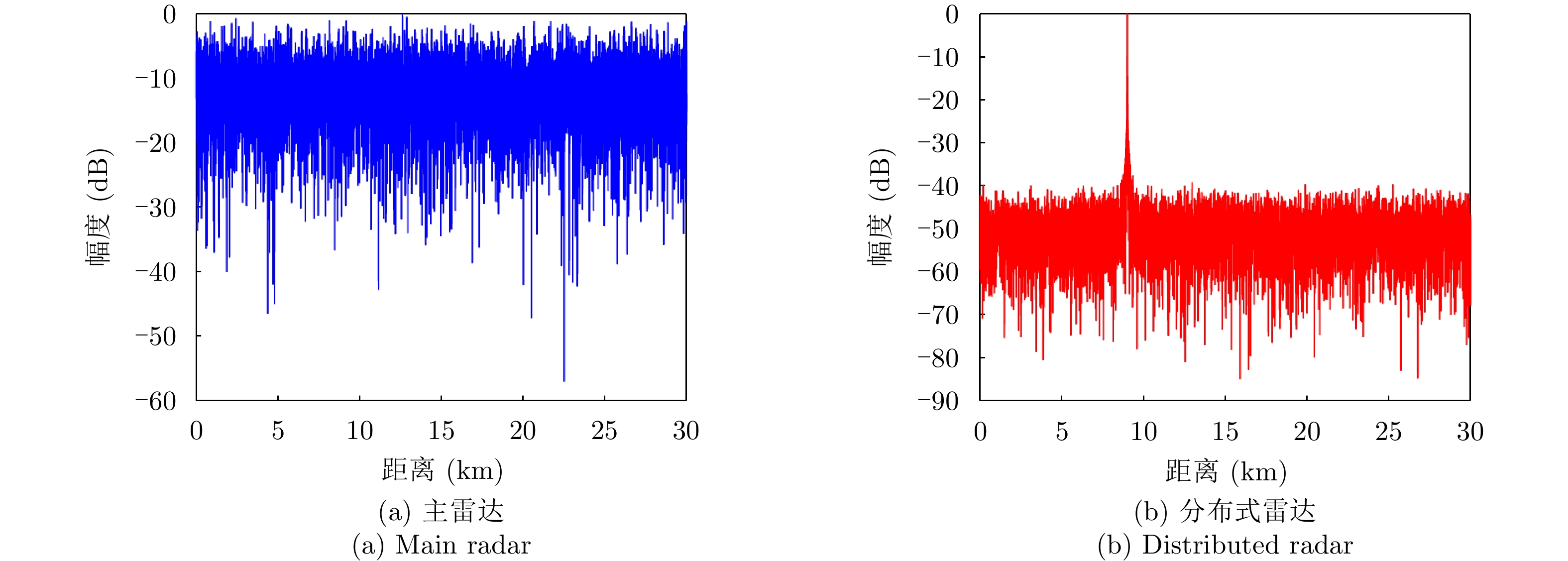
图 12 主雷达回波信号脉压结果与分布式雷达回波信号处理后的脉压结果
Figure 12. Main radar echo signal pulse compression result and distributed radar echo signal processed pulse compression result
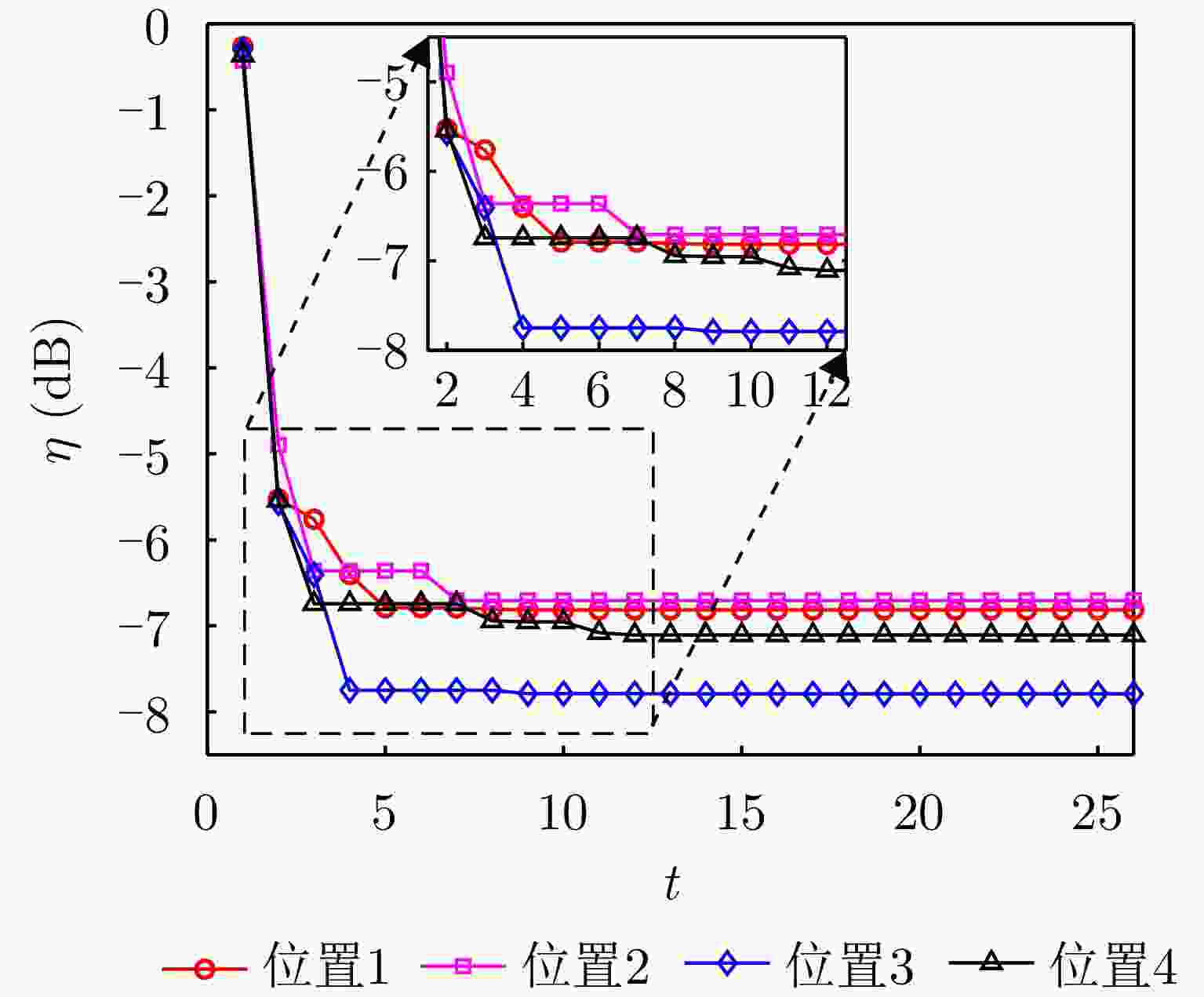
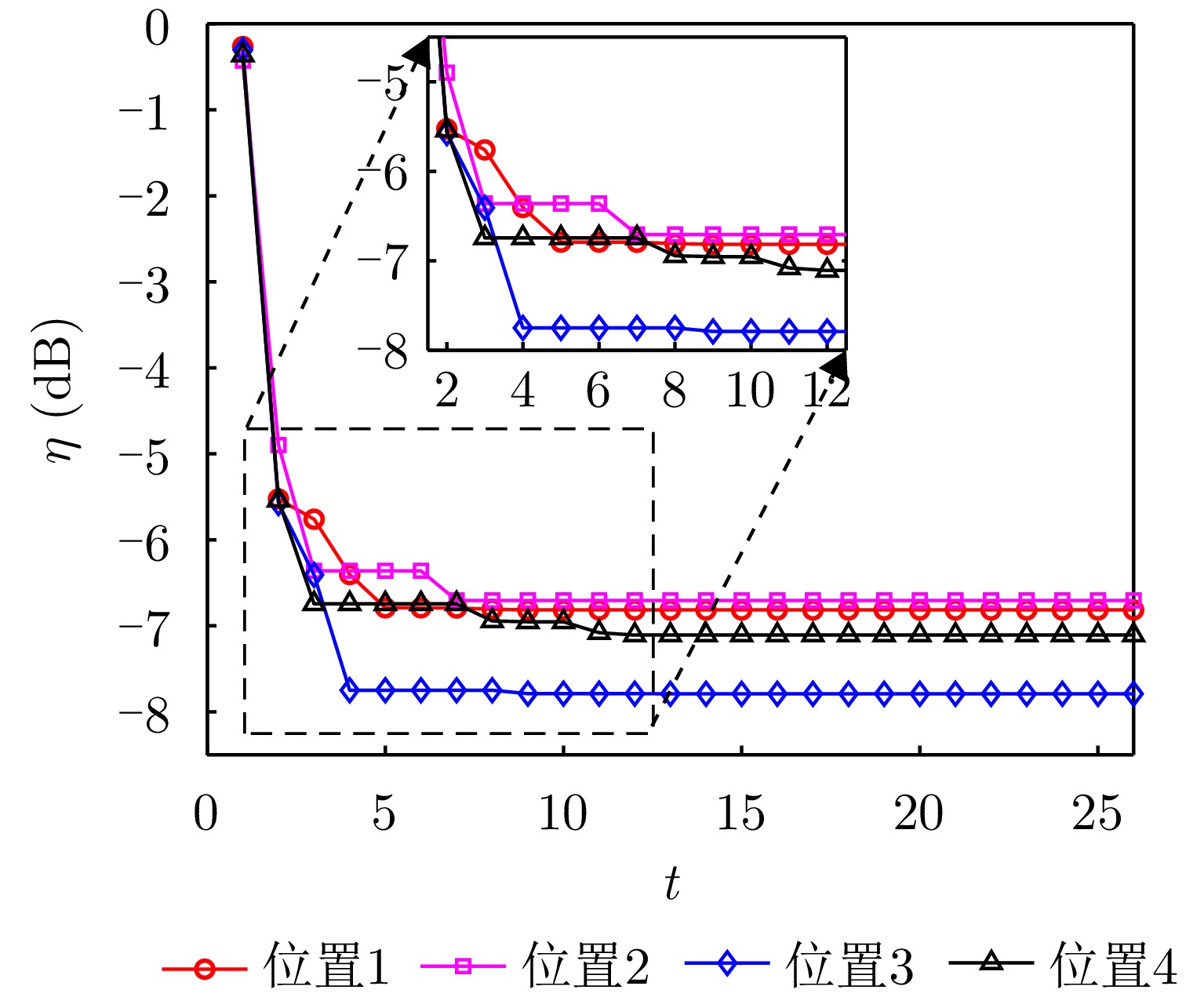
图 13 主雷达不同位置$ \eta $与迭代次数t关系
Figure 13. $ \eta $ versus iteration number t for different main radar position
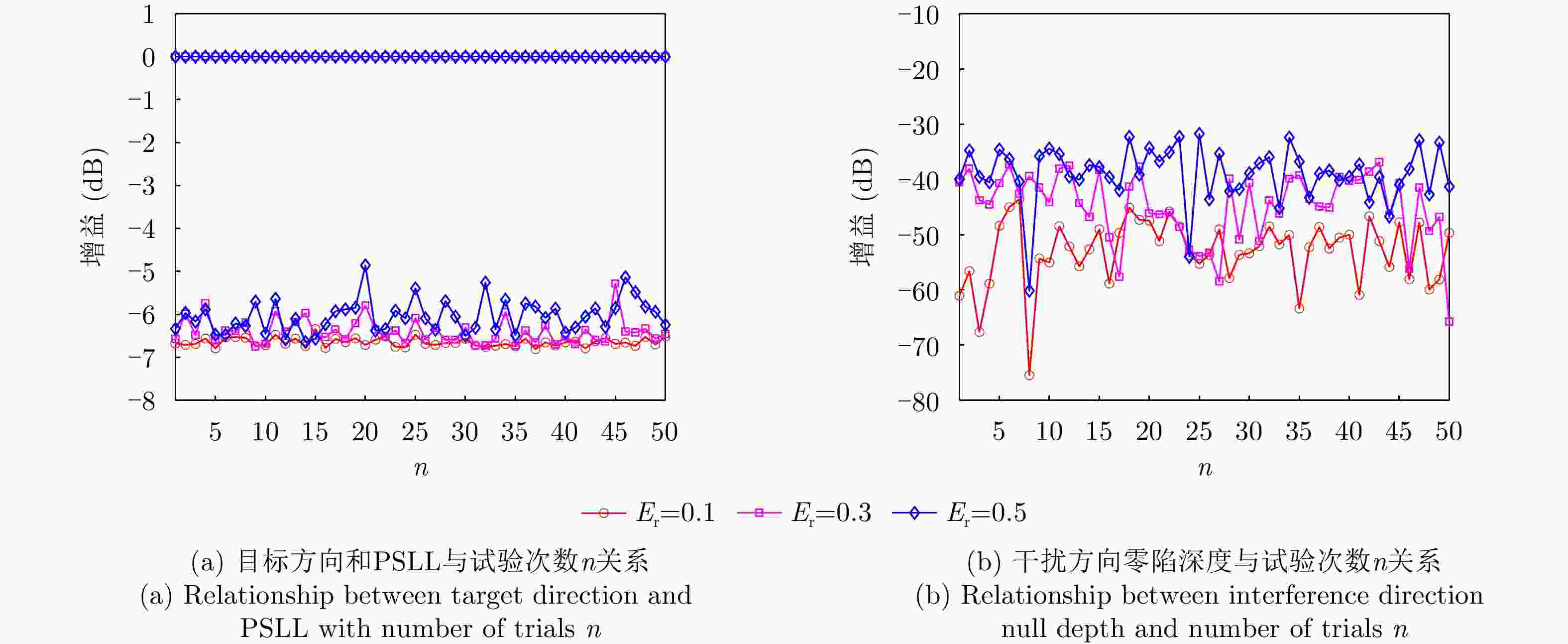
图 14 方向图增益与试验次数n关系
Figure 14. Relationship between pattern gain and number of trials n
1 DPIOF算法流程
1. DPIOF algorithm flow
输入:$ {{\tilde {\boldsymbol{l}}}^{\left( 0 \right)}} $, $ {{{\boldsymbol{m}}}^{\left( 0 \right)}} $, T, P, $ {P_{\text{m}}} $, H; 输出:$ {{\tilde {\boldsymbol{l}}}_{{\text{opt}}}} $, $ {{{\boldsymbol{m}}}_{{\text{opt}}}} $, $ {\eta _{{\text{opt}}}} $; 1: $ t = 0 $; 2: $ t = t + 1 $,$ h = 0 $; 3: $ h = h + 1 $; 4: 固定$ {{\boldsymbol{m}}}_{{\text{opt}}}^{\left( {t - 1,H} \right)} $,利用IAG-PSO算法更新$ {{\tilde {\boldsymbol{l}}}^{\left( {t,h} \right)}} $,得到目标
函数值$ {\gamma ^{\left( {t,h} \right)}} $;5: 如果$ {\gamma ^{\left( {t,h} \right)}} < {\gamma ^{\left( {t - 1,H} \right)}} $,令$ {\tilde {\boldsymbol{l}}}_{{\text{opt}}}^{\left( {t,h} \right)} = {{\tilde {\boldsymbol{l}}}^{\left( {t,h} \right)}} $, $ \gamma _{{\text{opt}}}^{\left( {t,h} \right)} = {\gamma ^{\left( {t,h} \right)}} $;
否则,$ {\tilde {\boldsymbol{l}}}_{{\text{opt}}}^{\left( {t,h} \right)} = {{\tilde {\boldsymbol{l}}}^{\left( {t - 1,H} \right)}} $, $ \gamma _{{\text{opt}}}^{\left( {t,h} \right)} = {\gamma ^{\left( {t - 1,H} \right)}} $;6: 固定$ {\tilde {\boldsymbol{l}}}_{{\text{opt}}}^{\left( {t,h} \right)} $,利用IAG-PSO算法更新$ {{{\boldsymbol{m}}}^{\left( {t,h} \right)}} $,得到目标函数
值$ {\eta ^{\left( {t,h} \right)}} $;7: 如果$ {\eta ^{\left( {t,h} \right)}} < {\eta ^{\left( {t - 1,H} \right)}} $,令$ {{\boldsymbol{m}}}_{{\text{opt}}}^{\left( {t,h} \right)} = {{{\boldsymbol{m}}}^{\left( {t,h} \right)}} $, $ \eta _{{\text{opt}}}^{\left( {t,h} \right)} = {\eta ^{\left( {t,h} \right)}} $;
否则,$ {{\boldsymbol{m}}}_{{\text{opt}}}^{\left( {t,h} \right)} = {{{\boldsymbol{m}}}^{\left( {t - 1,H} \right)}} $, $ \eta _{{\text{opt}}}^{\left( {t,h} \right)} = {\eta ^{\left( {t - 1,H} \right)}} $;8: 如果$ h < H $,继续步骤3; 9: 如果$ t = T $,结束;否则,$ {\text{Initial}}\left( {{\tilde {\boldsymbol{l}}}_{{\text{opt}}}^{\left( {t,h} \right)}} \right) $,令$ {{\boldsymbol{m}}}_{{\text{opt}}}^{\left( {t,H} \right)} = {{{\boldsymbol{m}}}^{\left( 0 \right)}} $,
继续步骤2。 下载: 导出CSV
下载: 导出CSV
2 基于IAG-PSO算法求解流程
2. IAG-PSO algorithm solution flow
输入:$ {\text{Initial}}( {{\tilde {\boldsymbol{l}}}_{{\text{opt}}}^{\left( t \right)}} ) $, P, $ {\text{NP}} $, $ {w_{\max }} $, $ {w_{\min }} $, $ {p_{\text{c}}} $, $ {p_{\text{m}}} $, K,速度和位置边界条件; 输出:$ {{\tilde {\boldsymbol{l}}}^{\left( {t + 1} \right)}} $, $ {\gamma ^{\left( {t + 1} \right)}} $; 1: $ k = 0 $,得到初始化后的新种群,计算种群中所有个体适应度$ {\gamma ^{\left( 0 \right)}}\left( j \right) $,$ j = 1,2, \cdots ,{\text{NP}} $,得到$ \gamma _{\min }^{\left( 0 \right)} $, $ \gamma _{\text{u}}^{\left( 0 \right)} $, $ {{\boldsymbol{p}}}_{{\text{best}}}^{\left( 0 \right)} $, $ {{\boldsymbol{g}}}_{{\text{best}}}^{\left( 0 \right)} $; 2: $ k = k + 1 $; 3: 计算$ c_1^{\left( k \right)} $和$ c_2^{\left( k \right)} $,计算种群中个体j权值$ w_{j}^{\left( k \right)} $,更新其速度和位置信息,越界处理,保留更新后适应度更小的个体,输出更新后种群中
个体j速度$ {{\boldsymbol{v}}}_{j}^{\left( k \right)} $和位置$ {\tilde {\boldsymbol{l}}}_{j}^{\left( k \right)} $,$ j = 1,2, \cdots ,{\text{NP}} $;4: 交叉操作,更新交叉池中个体速度$ {{\boldsymbol{v}}}_i^{\prime\left( k \right)} $和位置$ {\tilde {\boldsymbol{l}}}_i^{\prime\left( k \right)} $,越界处理,保留更新后适应度更小个体,$ i\left( {i = 1,2, \cdots ,{\text{cp}}} \right) $; 5: 变异操作,更新变异池中个体速度$ {{\boldsymbol{v}}}_i^{\prime\prime\left( k \right)} $和位置$ {\tilde {\boldsymbol{l}}}_i^{\prime\prime\left( k \right)} $,越界处理,保留更新后适应度更小个体,$ i\left( {i = 1,2, \cdots ,{\text{mp}}} \right) $; 6: 更新种群个体适应度$ {\gamma ^{\left( k \right)}}\left( j \right) $,得到$ \gamma _{\min }^{\left( k \right)} $, $ \gamma _{\text{u}}^{\left( k \right)} $, $ {{\boldsymbol{p}}}_{{\text{best}}}^{\left( k \right)} $, $ {{\boldsymbol{g}}}_{{\text{best}}}^{\left( k \right)} $; 7: 如果$ k = K $,令$ {{\tilde {\boldsymbol{l}}}^{\left( {t + 1} \right)}} = {{\boldsymbol{g}}}_{{\text{best}}}^{\left( K \right)} $, $ {\gamma ^{\left( {t + 1} \right)}} = \gamma _{\min }^{\left( K \right)} $,结束;否则,继续步骤2。
下载: 导出CSV
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 参数 数值 信号载频$ {f_0} $ 10 GHz 主雷达孔径 5 m 目标角度$ {\theta _0} $ 0° 信噪比SNR 20 dB 干扰角度$ {\theta _{\rm j}} $ 0.05° 干噪比INR 20 dB
下载: 导出CSV
表 2 IAG-PSO算法仿真参数
Table 2. IAG-PSO algorithm simulation parameters
参数 数值 参数 数值 种群数量$ {\text{NP}} $ 100 交叉概率$ {p_{\text{c}}} $ 0.8 最大迭代次数K 30 变异概率$ {p_{\text{m}}} $ 0.3 权重最大值$ {w_{\max }} $ 1 基因数量 6 权重最小值$ {w_{\min }} $ 0.4 速度取值范围 [–2,2]
下载: 导出CSV
表 3 辅助雷达阵元数量与$ {\boldsymbol{\eta}} $
Table 3. The number of auxiliary subarray elements and ${\boldsymbol{ \eta}} $
子阵 优化前 优化后 子阵2 61 61 子阵3 61 55 子阵4 61 61 子阵5 61 59 子阵6 61 47 子阵7 61 57 子阵8 61 41 $ \eta $ –6.630 dB –6.815 dB
下载: 导出CSV
表 4 不同优化方式的优化结果(dB)
Table 4. Optimization results of different approaches (dB)
优化方式 $ \eta $ 优化方式1 –6.630 优化方式2 –6.355 优化方式3 –6.611 优化方式4 –0.265 DPIOF –6.815
下载: 导出CSV
表 5 回波数据的仿真参数
Table 5. Simulation parameters of echo data
参数 数值 参数 数值 信号载频$ {f_0} $ 10 GHz 目标距离 9 km 信号带宽 20 MHz 采样率 50 MHz 信号脉宽 10 μs 干扰类型 噪声干扰 目标角度$ {\theta _0} $ 0° 信噪比SNR –20 dB 干扰角度$ {\theta _{\rm j}} $ 0.05° 干噪比INR 30 dB
下载: 导出CSV
表 6 主雷达不同位置优化结果(dB)
Table 6. Optimization results of different positions of the main radar (dB)
主雷达位置 $ \eta $ 位置1 –6.815 位置2 –6.705 位置3 –7.790 位置4 –7.107
下载: 导出CSV
-
[1] 赵国庆. 雷达对抗原理[M]. 2版. 西安: 西安电子科技大学出版社, 2012: 1–4.ZHAO Guoqing. Principle of Radar Countermeasure[M]. 2nd ed. Xi’an: Xidian University Press, 2012: 1–4. [2] KWAK C M. Application of DRFM in ECM for pulse type radar[C]. 2009 34th International Conference on Infrared, Millimeter, and Terahertz Waves, Busan, Korea (South), 2009. doi: 10.1109/ICIMW.2009.5324673. [3] 于恒力. 多站雷达系统协同抗有源干扰方法研究[D]. [博士论文], 西安电子科技大学, 2020: 27–28. doi: 10.27389/d.cnki.gxadu.2020.000015.YU Hengli. Study on active ECCM in multiple-radar systems[D]. [Ph.D. dissertation], Xidian University, 2020: 27–28. doi: 10.27389/d.cnki.gxadu.2020.000015. [4] 方愚渊, 魏嵩, 何超, 等. 雷达对抗技术研究综述与智能反干扰展望[J]. 信息对抗技术, 2024, 3(2): 5–26. doi: 10.12399/j.issn.2097-163x.2024.02.002.FANG Yuyuan, WEI Song, HE Chao, et al. An overview of radar anti-jamming technology and prospect on intelligent jamming-countermeasure game[J]. Information Countermeasure Technology, 2024, 3(2): 5–26. doi: 10.12399/j.issn.2097-163x.2024.02.002. [5] 王永良, 丁前军, 李荣锋. 自适应阵列处理[M]. 北京: 清华大学出版社, 2009: 66–73.WANG Yongliang, DING Qianjun, and LI Rongfeng. Adaptive Array Processing[M]. Beijing: Tsinghua University Press, 2009: 66–73. [6] 张小飞, 李建峰, 徐大专, 等. 阵列信号处理及MATLAB实现[M]. 2版 北京: 电子工业出版社, 2020: 55–60.ZHANG Xiaofei, LI Jianfeng, XU Dazhuan, et al. Array Signal Processing and MATLAB Implementation[M]. 2nd ed. Beijing: Publishing House of Electronic Industry, 2020: 55–60. [7] 李消霞. 动平台分布式雷达干扰抑制方法研究[D]. [硕士论文], 西安电子科技大学, 2021: 1–4. doi: 10.27389/d.cnki.gxadu.2021.003285.LI Xiaoxia. Research on interference suppression method of distributed radar on moving platform[D]. [Master dissertation], Xidian University, 2021: 1–4. doi: 10.27389/d.cnki.gxadu.2021.003285. [8] 韩博文, 兰天, 杨小鹏. 分布式阵列雷达波束-极化域联合主瓣干扰抑制方法[J]. 现代雷达, 2021, 43(10): 21–26. doi: 10.16592/j.cnki.1004-7859.2021.10.004.HAN Bowen, LAN Tian, and YANG Xiaopeng. Beamspace-polarization domain main-lobe jamming suppression method for distributed array radar[J]. Modern Radar, 2021, 43(10): 21–26. doi: 10.16592/j.cnki.1004-7859.2021.10.004. [9] 宋虎, 顾红, 王建, 等. 主瓣干扰下的自适应旁瓣对消算法设计[J]. 系统工程与电子技术, 2015, 37(8): 1723–1728. doi: 10.3969/j.issn.1001-506X.2015.08.02.SONG Hu, GU Hong, WANG Jian, et al. Adaptive multiple side-lobe canceller design for main-lobe jammer[J]. Systems Engineering and Electronics, 2015, 37(8): 1723–1728. doi: 10.3969/j.issn.1001-506X.2015.08.02. [10] 于芳. 分布式雷达干扰抑制算法与仿真实现研究[D]. [硕士论文], 电子科技大学, 2023: 71–74. doi: 10.27005/d.cnki.gdzku.2023.003667.YU Fang. Research on distributed radar jamming suppression algorithm and simulation implementation[D]. [Master dissertation], Xidian University, 2023: 71–74. doi: 10.27005/d.cnki.gdzku.2023.003667. [11] 蒲伟铭, 梁振楠, 陈新亮, 等. 一种鲁棒的分布式雷达主瓣干扰抑制方法[J]. 信号处理, 2022, 38(2): 250–257. doi: 10.16798/j.issn.1003-0530.2022.02.004.PU Weiming, LIANG Zhennan, CHEN Xinliang, et al. A robust method for mainlobe interference suppression based on distributed array radar[J]. Journal of Signal Processing, 2022, 38(2): 250–257. doi: 10.16798/j.issn.1003-0530.2022.02.004. [12] HEIMILLER R C, BELYEA J E, and TOMLINSON P G. Distributed array radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 1983, AES-19(60): 831–839. doi: 10.1109/TAES.1983.309395. [13] 刘泉华, 张凯翔, 梁振楠, 等. 地基分布式相参雷达技术研究综述[J]. 信号处理, 2022, 38(12): 2443–2459. doi: 10.16798/j.issn.1003-0530.2022.12.001.LIU Quanhua, ZHANG Kaixiang, LIANG Zhennan, et al. Research overview of ground-based distributed coherent aperture radar[J]. Journal of Signal Processing, 2022, 38(12): 2443–2459. doi: 10.16798/j.issn.1003-0530.2022.12.001. [14] 刘兴华, 王国玉, 徐振海, 等. 分布式孔径相参合成原理、发展与技术实现综述[J]. 雷达学报, 2023, 12(6): 1229–1248. doi: 10.12000/JR23195.LIU Xinghua, WANG Guoyu, XU Zhenhai, et al. Review of principles, development and technical implementation of coherently combining distributed apertures[J]. Journal of Radars, 2023, 12(6): 1229–1248. doi: 10.12000/JR23195. [15] 易伟, 袁野, 刘光宏, 等. 多雷达协同探测技术研究进展: 认知跟踪与资源调度算法[J]. 雷达学报, 2023, 12(3): 471–499. doi: 10.12000/JR23036.YI Wei, YUAN Ye, LIU Guanghong, et al. Recent advances in multi-radar collaborative surveillance: Cognitive tracking and resource scheduling algorithms[J]. Journal of Radars, 2023, 12(3): 471–499. doi: 10.12000/JR23036. [16] ZHANG Honggang, LUO Jian, CHEN Xinliang, et al. Fresnel based frequency domain adaptive beamforming for large aperture distributed array radar[C]. 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 2016. doi: 10.1109/ICSPCC.2016.7753658. [17] 殷丕磊. 地基宽带分布式全相参雷达技术研究[D]. [博士论文], 北京理工大学, 2016: 112–116.YIN Pilei. Research on ground-based wideband distributed coherent aperture radar[D]. [Ph.D. dissertation], Beijing Institute of Technology, 2016: 112–116. [18] 张宗傲. 阵列雷达自适应主瓣干扰抑制算法研究[D]. [硕士论文], 北京理工大学, 2015: 23–33.ZHANG Zongao. Research on adaptive mainlobe interference suppression algorithm of array radar[D]. [Master dissertation], Beijing Institute of Technology, 2015: 23–33. [19] YANG Xiaopeng, ZHANG Zongao, ZENG Tao, et al. Mainlobe interference suppression based on Eigen-projection processing and covariance matrix reconstruction[J]. IEEE Antennas and Wireless Propagation Letters, 2014, 13: 1369–1372. doi: 10.1109/LAWP.2014.2339224. [20] ZHANG Honggang, LUO Jian, CHEN Xinliang, et al. Whitening filter for main-lobe interference suppression in distributed array radar[C]. 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 2016. doi: 10.1109/RADAR.2016.8059238. [21] LONG Teng, ZHANG Honggang, ZENG Tao, et al. High accuracy unambiguous angle estimation using multi-scale combination in distributed coherent aperture radar[J]. IET Radar, Sonar & Navigation, 2017, 11(7): 1090–1098. doi: 10.1049/iet-rsn.2016.0450. [22] LIU Ruitao, ZHANG Wei, YU Xianxiang, et al. Transmit-receive beamforming for distributed phased-MIMO radar system[J]. IEEE Transactions on Vehicular Technology, 2022, 71(2): 1439–1453. doi: 10.1109/TVT.2021.3133596. [23] 王铮, 孙雨泽, 杨小鹏, 等. 分布式雷达节点位置优化的多约束遗传算法研究[J]. 信号处理, 2019, 35(6): 979–985. doi: 10.16798/j.issn.1003-0530.2019.06.007.WANG Zheng, SUN Yuze, YANG Xiaopeng, et al. Research on multi-constrained genetic algorithm for distributed radar elements position optimization[J]. Journal of Signal Processing, 2019, 35(6): 979–985. doi: 10.16798/j.issn.1003-0530.2019.06.007. [24] LIU Ruitao, WANG Bing, WEI Wenqiang, et al. A general efficient design method for optimum nonuniform array pattern synthesis[C]. 2023 IEEE Radar Conference (RadarConf23), San Antonio, USA, 2023. doi: 10.1109/RadarConf2351548.2023.10149597. [25] YANG Xiaopeng, YIN Pilei, ZENG Tao, et al. Applying auxiliary array to suppress mainlobe interference for ground-based radar[J]. IEEE Antennas and Wireless Propagation Letters, 2013, 12: 433–436. doi: 10.1109/LAWP.2013.2254698. [26] 席昕, 刘高高, 刘强, 等. 对旁瓣相消的分布式干扰优化布阵方法[J]. 系统工程与电子技术, 2024, 46(8): 2623–2628. doi: 10.12305/j.issn.1001-506X.2024.08.10.XI Xin, LIU Gaogao, LIU Qiang, et al. Distributed interference optimal array method for sidelobe cancellation[J]. Systems Engineering and Electronics, 2024, 46(8): 2623–2628. doi: 10.12305/j.issn.1001-506X.2024.08.10. [27] 陈炽雄, 景小荣, 刘友永, 等. 基于改进粒子群算法的分布式频率分集阵栅瓣抑制方法[J]. 电讯技术, 2022, 62(12): 1813–1821. doi: 10.3969/j.issn.1001-893x.2022.12.015.CHEN Chixiong, JING Xiaorong, LIU Youyong, et al. A grid lobe suppression method of distributed frequency diverse array based on improved particle swarm optimization algorithm[J]. Telecommunication Engineering, 2022, 62(12): 1813–1821. doi: 10.3969/j.issn.1001-893x.2022.12.015. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

