
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
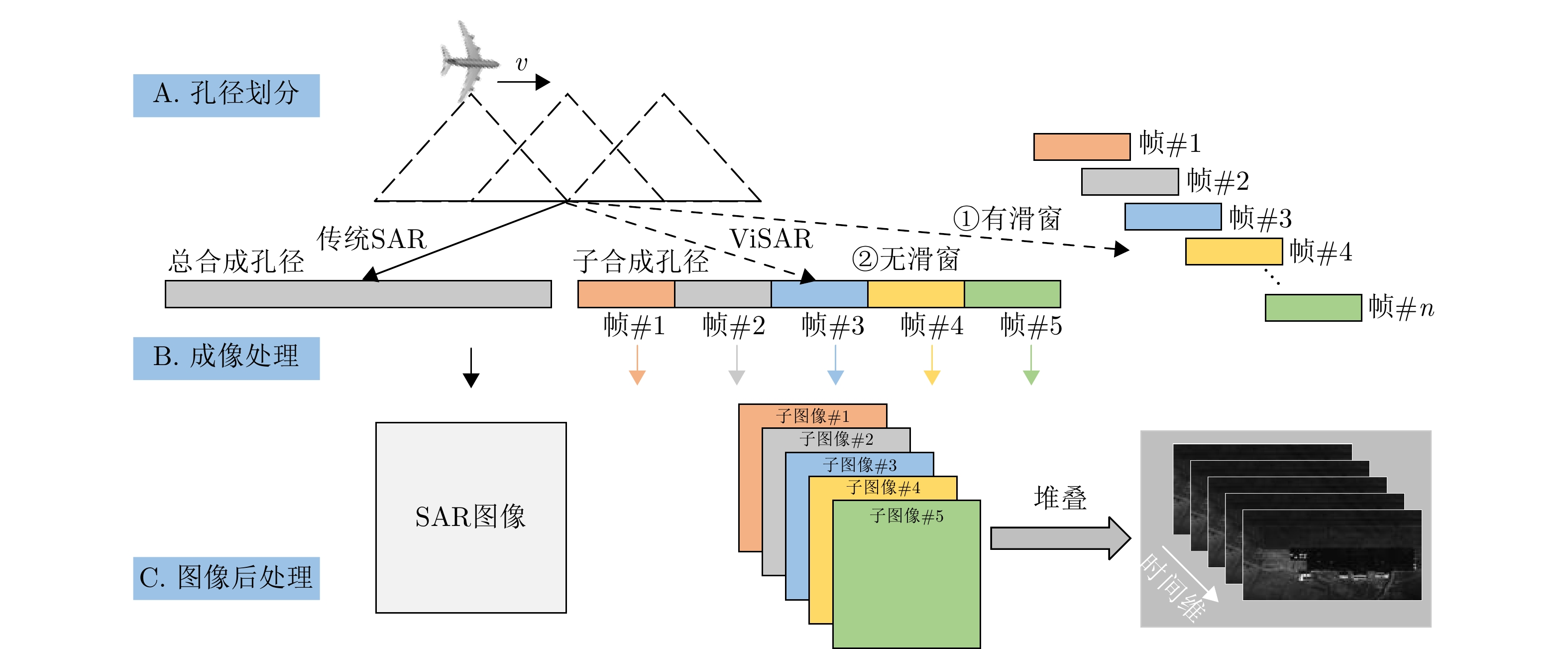
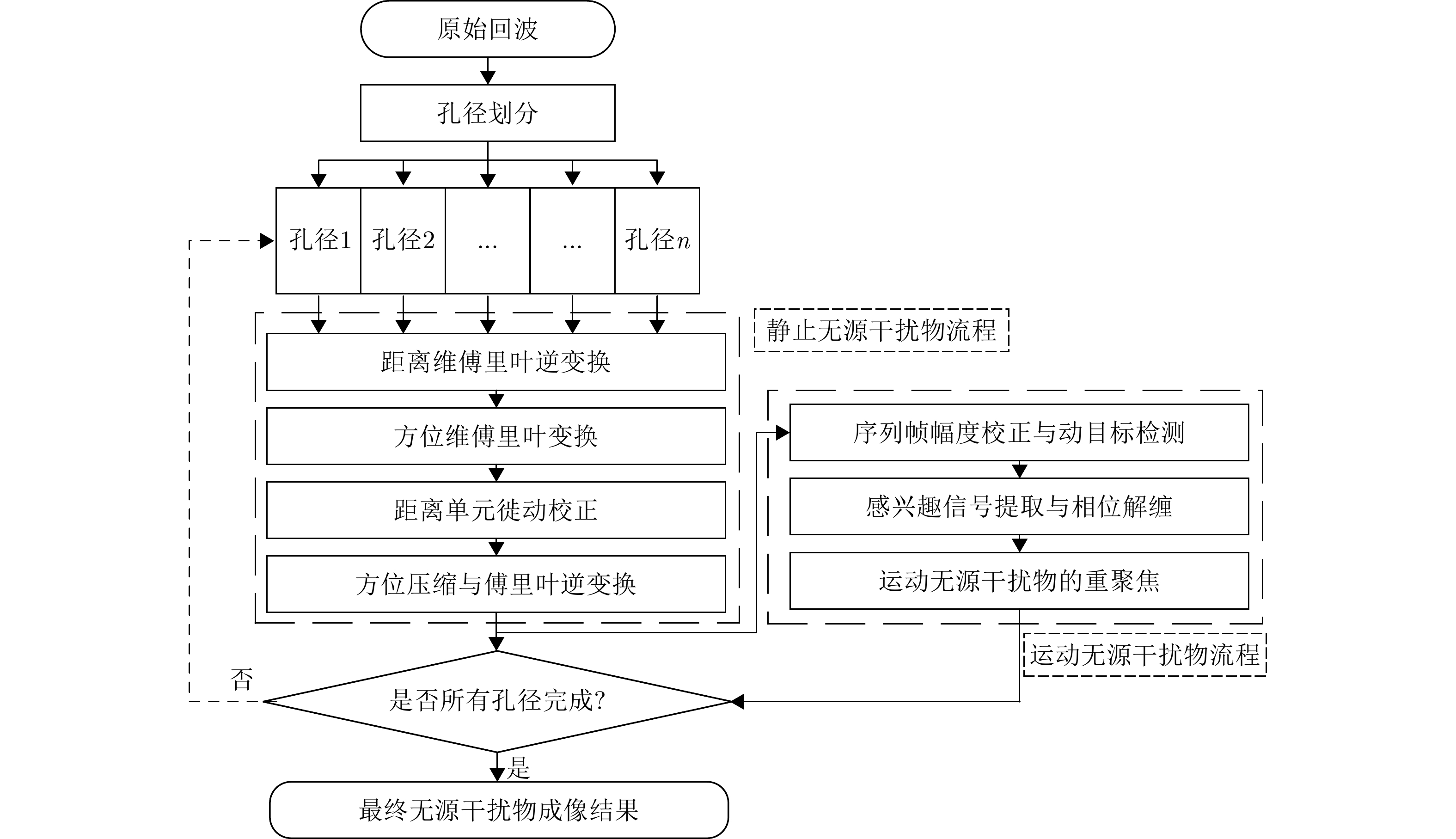
摘要: 无源干扰物的成像一直是雷达成像/对抗研究中的热点问题,直接影响着雷达目标检测和识别性能。然而,在微波频段下,为达到期望的方位分辨率,通常需要较长的驻留时间来形成单幅图像,这使得无源干扰物难以通过成像直接区分,并缺乏时间维的分辨能力。相比之下,太赫兹频段成像系统在实现相同方位分辨率时所需的合成孔径更短,从而更容易获得低延迟、高分辨、高帧率的成像结果。因此,太赫兹雷达在视频合成孔径雷达(ViSAR)技术中具有重要潜力。首先,对机载太赫兹ViSAR的孔径划分及其成像系统指标进行简要分析。随后,静止无源干扰物以角反阵和伪装网为例,探索它们运动补偿前后的成像结果及成像特性,并首次实验验证了具有上下起伏网格结构的伪装网在太赫兹频段将表现出粗糙特性,展现出该频段下特殊的目标特性。接下来,运动无源干扰物以旋转角反为例,分析了旋转角反成像所形成的压制性成像干扰。考虑到静止场景在相邻子孔径下类似,在完成帧间成像结果图像和幅度校准后,可直接在图像域内基于非相干相减实现旋转角反检测,从而提取感兴趣信号并实施非参数化补偿。目前关于太赫兹频段下对无源干扰物的外场成像实验验证甚少。该研究开展了太赫兹频段公里级机载外场试验,有效验证了太赫兹ViSAR具备对无源干扰物良好的高分辨与高帧率成像能力。Abstract: Imaging of passive jamming objects has been a hot topic in radar imaging and countermeasures research, which directly affects the detection and recognition capabilities of radar targets. In the microwave band, the long dwell time required to generate a single image with desired azimuthal resolution makes it difficult to directly distinguish passive jamming objects based on imaging results. In addition, there is a lack of time-dimensional resolution. In comparison, terahertz imaging systems require a shorter synthetic aperture to achieve the same azimuthal resolution, making it easier to obtain low-latency, high-resolution, and high-frame-rate imaging results. Hence, terahertz radar has considerable potential in Video Synthetic Aperture Radar (ViSAR) technology. First, the aperture division and imaging resolutions of airborne terahertz ViSAR are briefly analyzed. Subsequently, imaging results and characteristics of stationary passive jamming objects, such as corner reflector arrays and camouflage mats, are explored before and after motion compensation. Further, the phenomenon that camouflage mats with fluctuating grids exhibit roughness in the terahertz band is demonstrated, exhibiting the special scattering characteristics of the terahertz band. Next, considering rotating corner reflectors as an example of moving passive jamming objects, their characteristics regarding suppressive interference are analyzed. Considering that stationary scenes feature similarity under adjacent apertures, rotating corner reflectors can be directly detected by incoherent image subtraction after inter-frame image and amplitude registrations, followed by the extraction of signals of interest and non-parametrical compensation. Currently, few field experiments regarding the imaging of passive jamming objects using terahertz ViSAR are being reported. Airborne field experiments have been performed to effectively demonstrate the high-resolution and high-frame-rate imaging capabilities of terahertz ViSAR
-
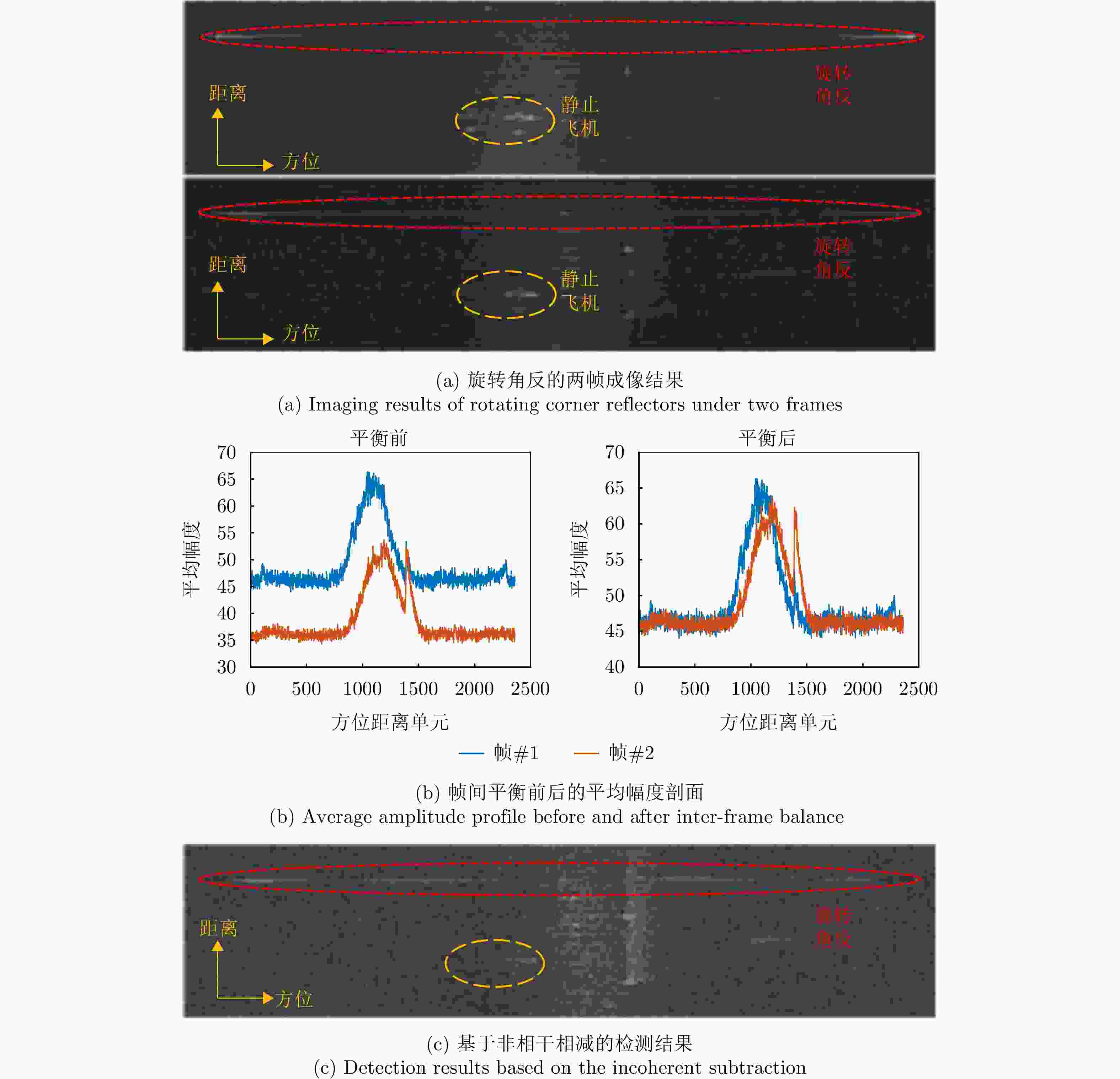
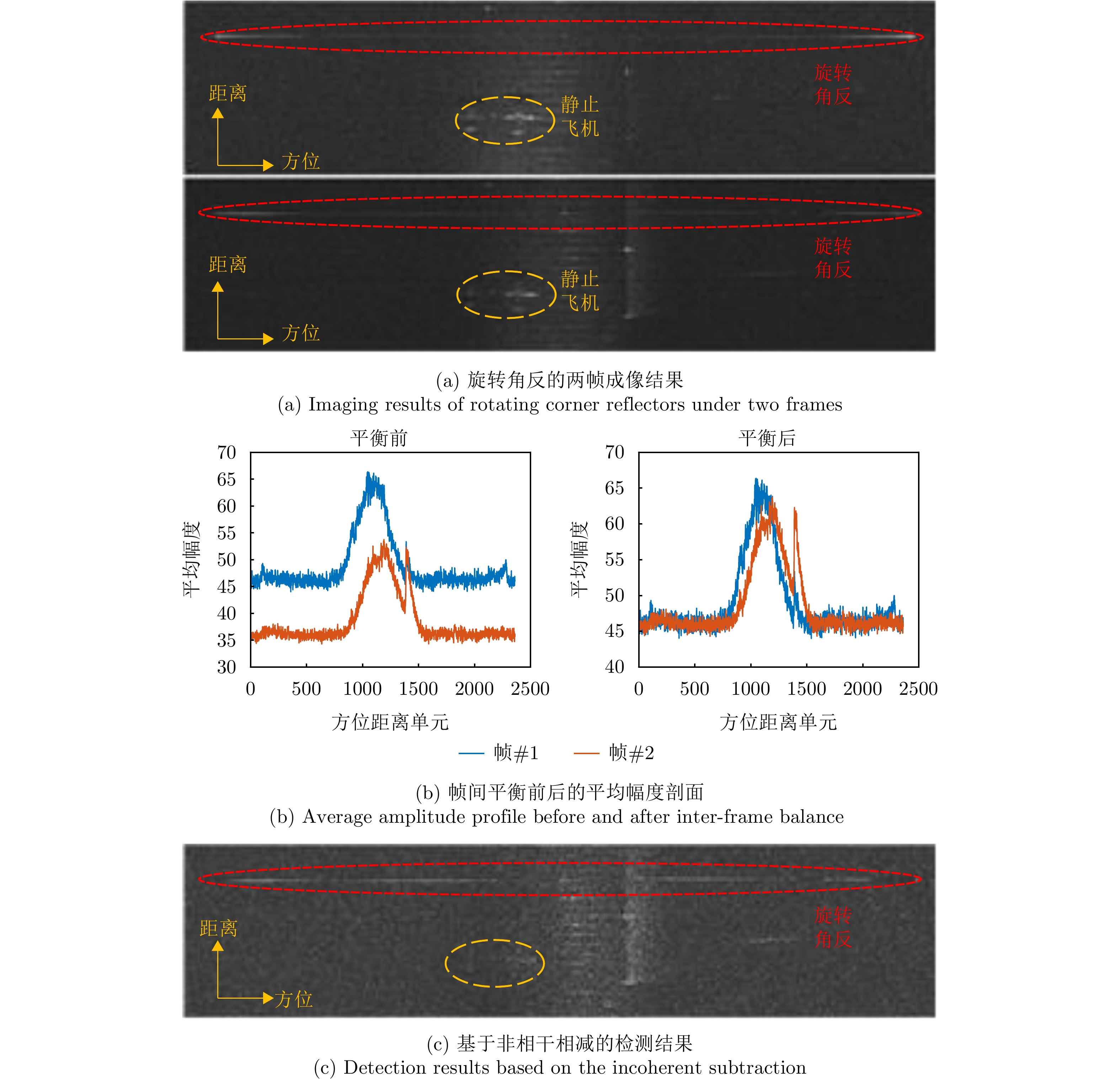
图 4 基于相邻帧间图像的旋转角反检测
Figure 4. Detection of rotating reflectors based on adjacent frames
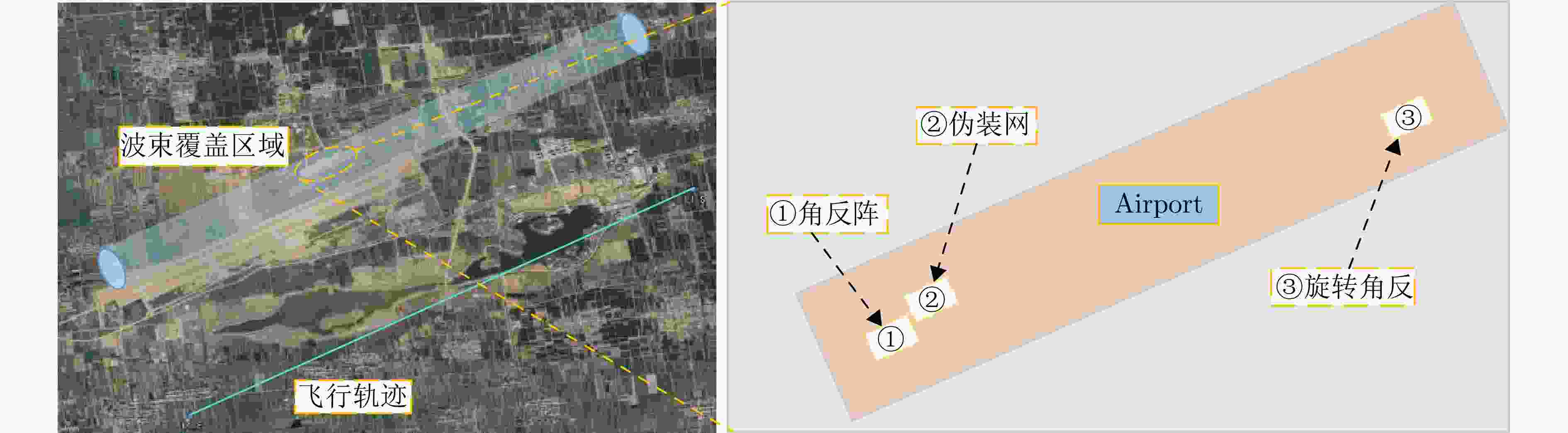
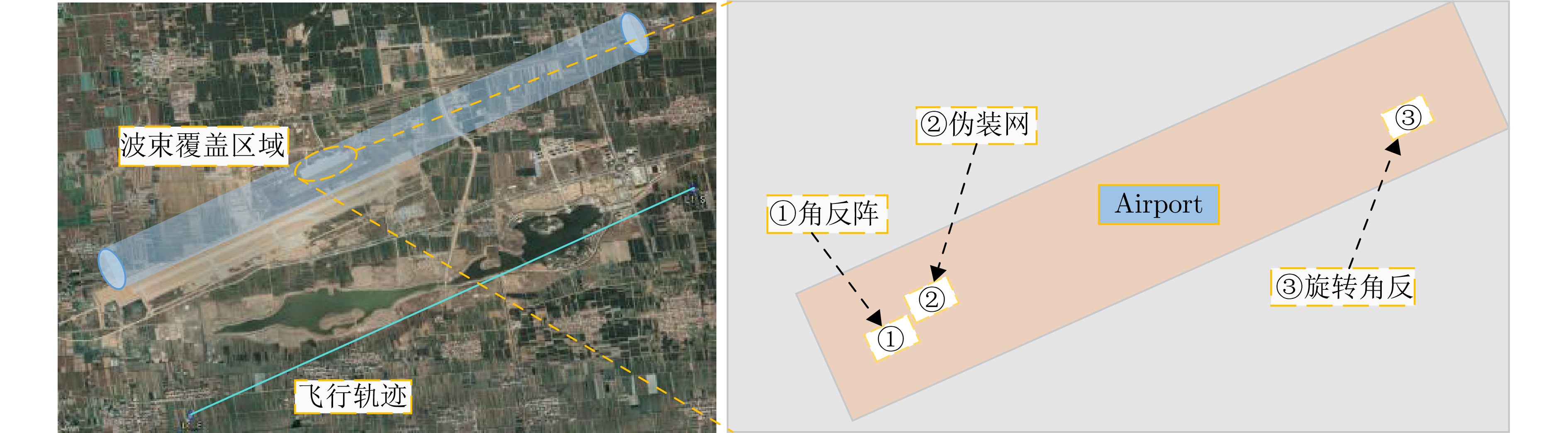
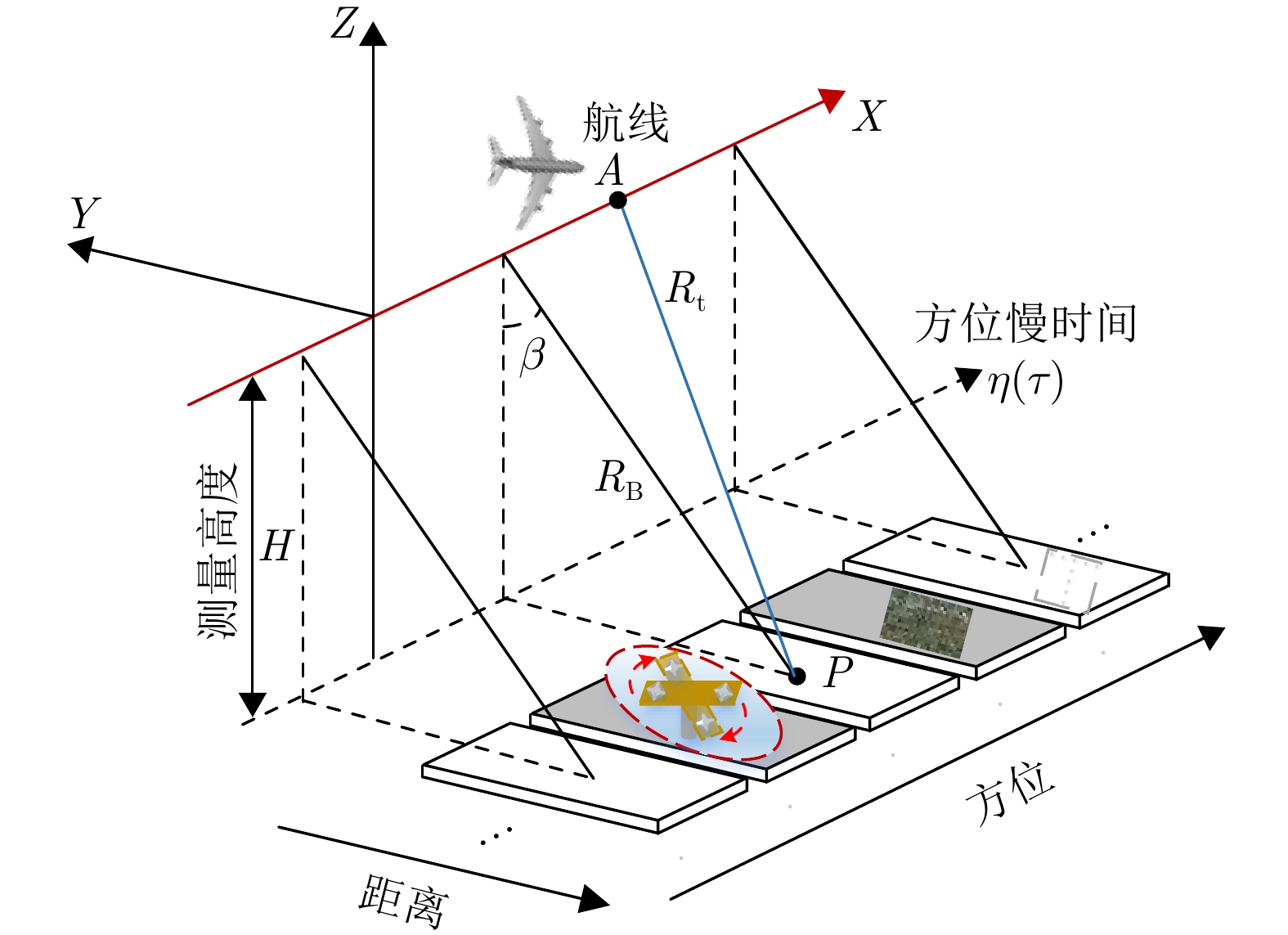
图 5 太赫兹条带ViSAR实验场景示意图
Figure 5. Diagram of airborne experiments regarding stripmap terahertz ViSAR
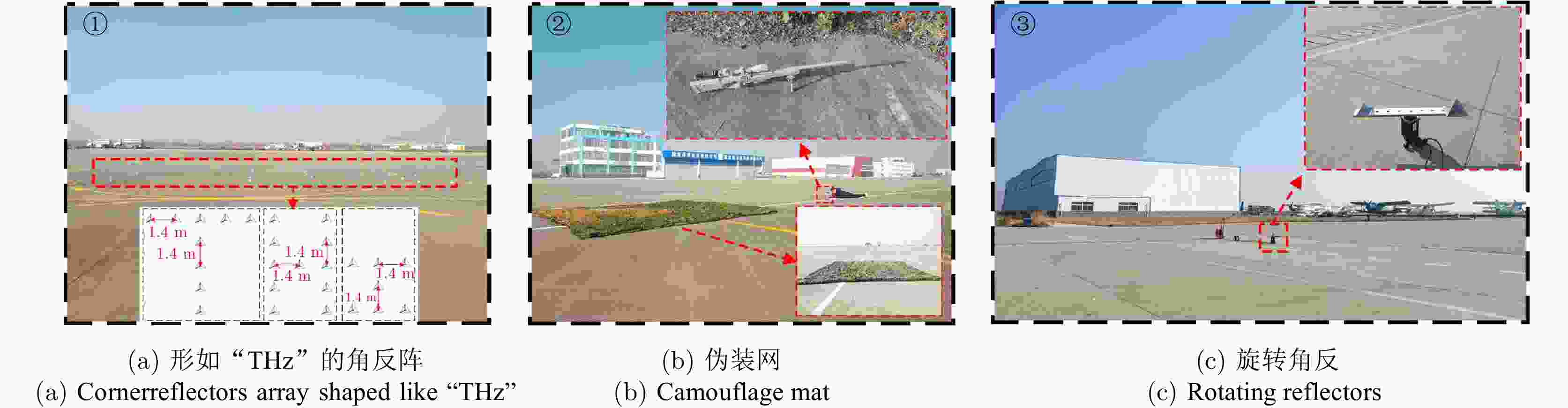
图 6 机场场景下3组实验目标的光学照片
Figure 6. Optical photos of three experimental targets in the airport
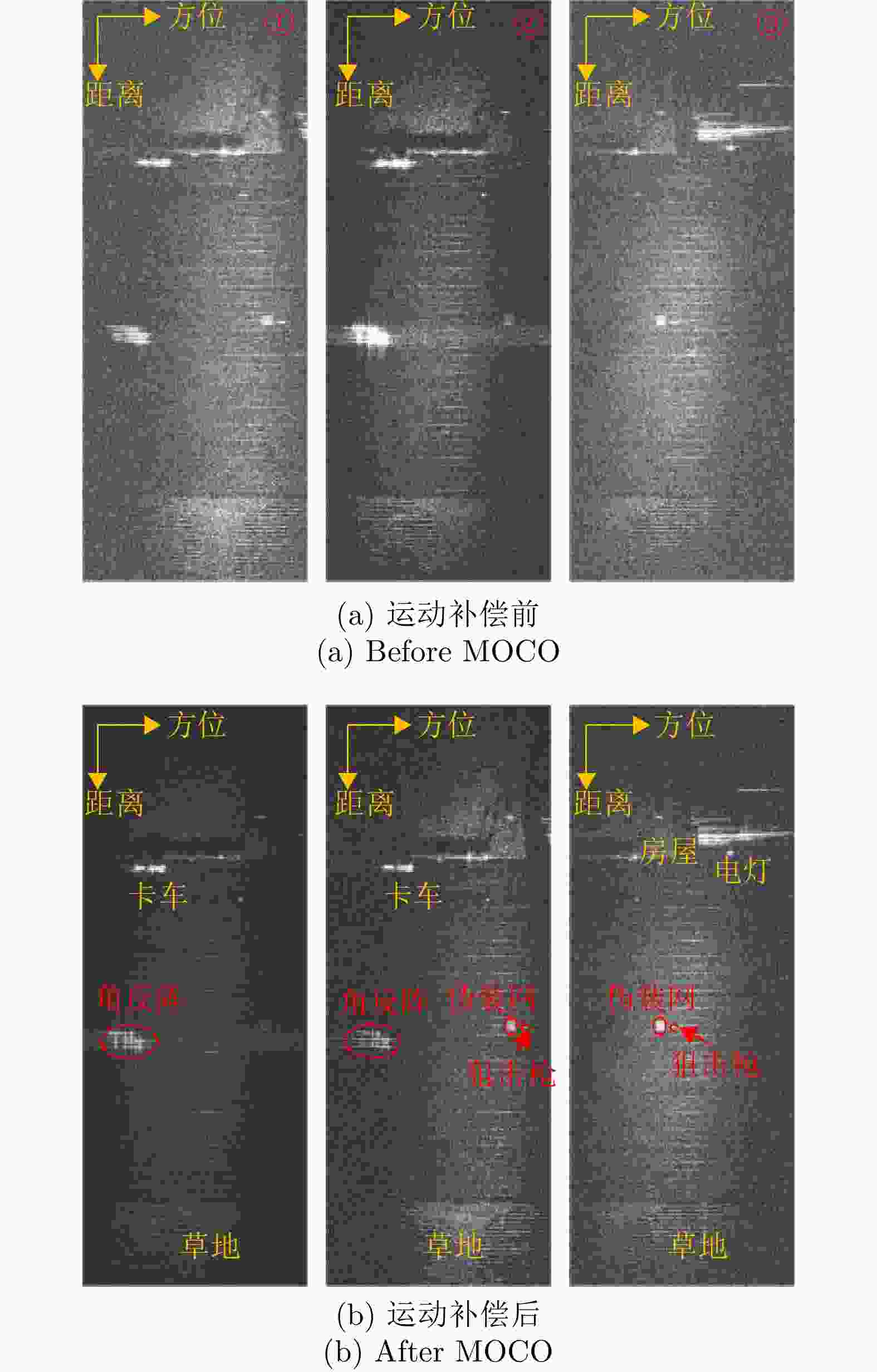
图 8 角反阵与伪装网的运动补偿前后的3帧成像结果
Figure 8. Imaging results of corner reflector array and camouflage mat
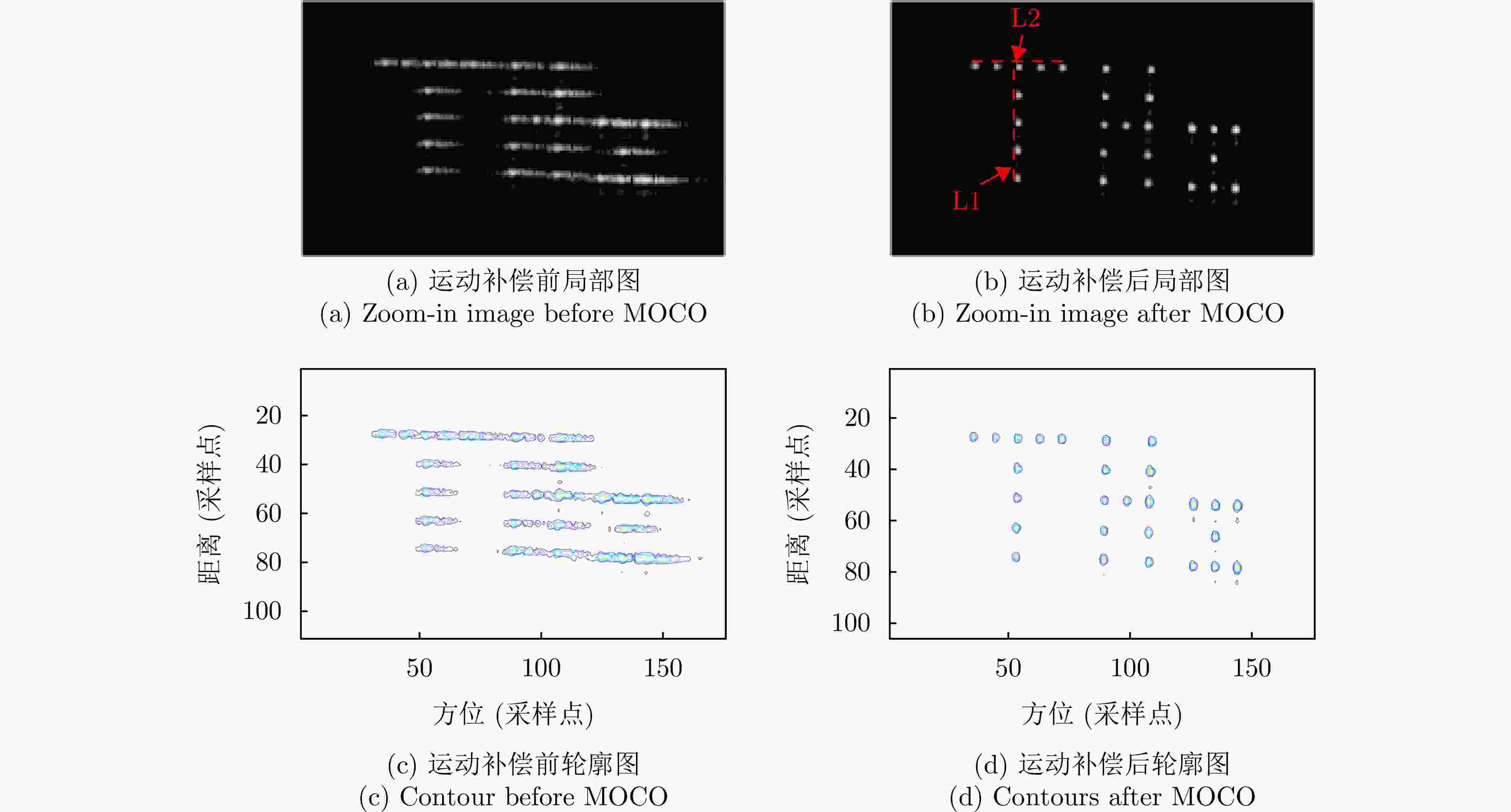
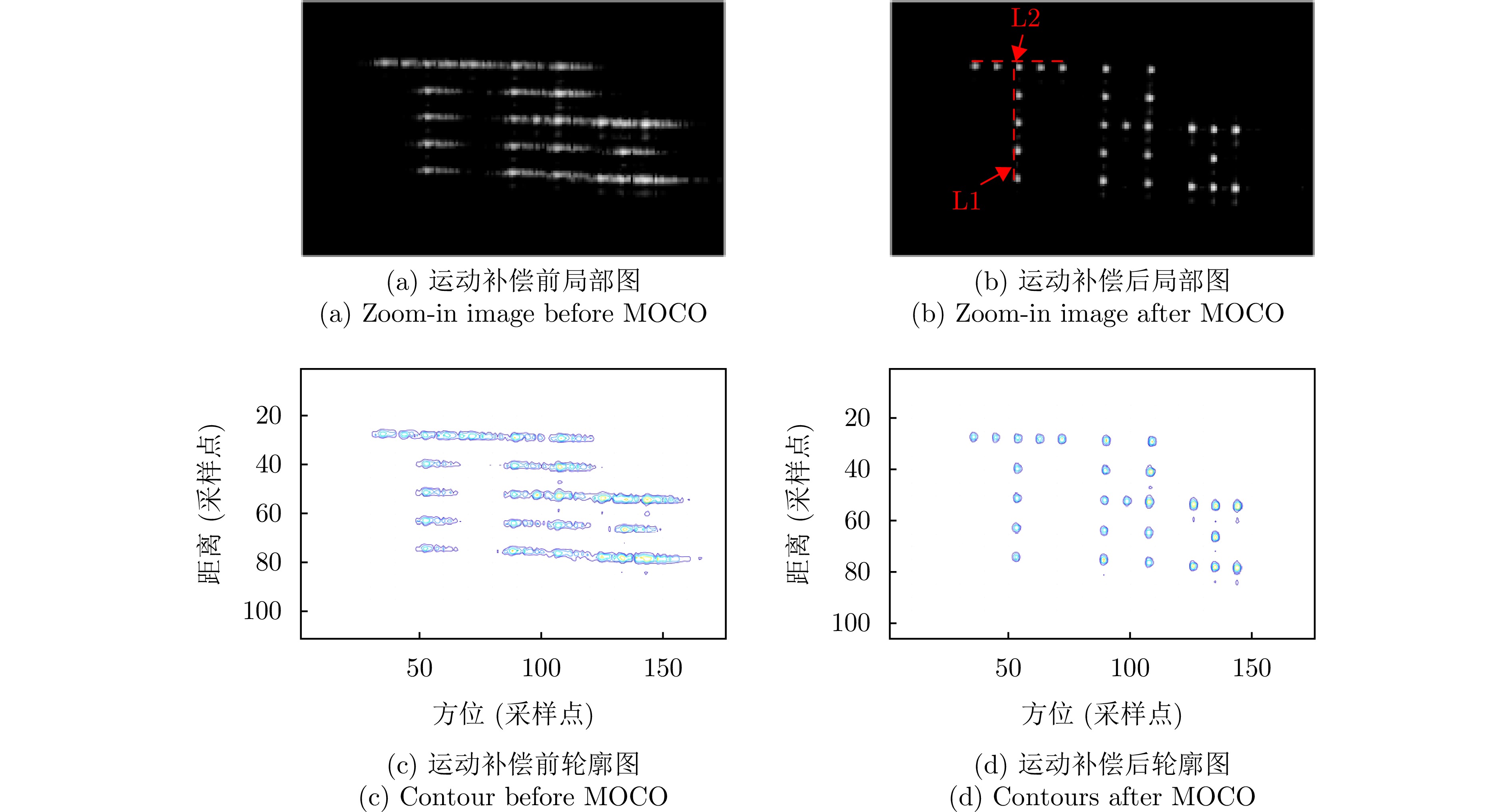
图 9 角反阵运动补偿前后结果对比
Figure 9. Local zoom-in images and contour plots of corner reflector array before and after MOCO
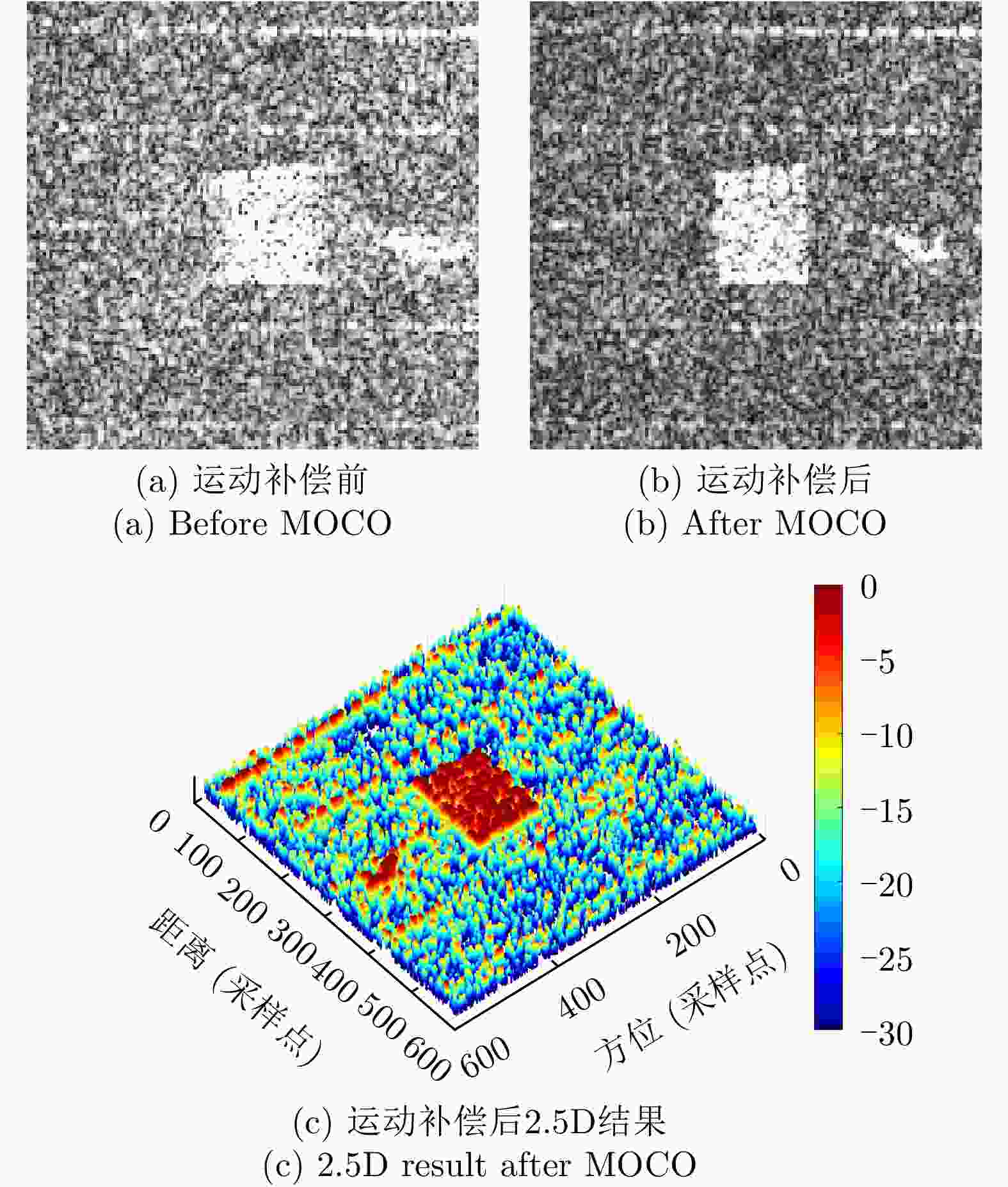
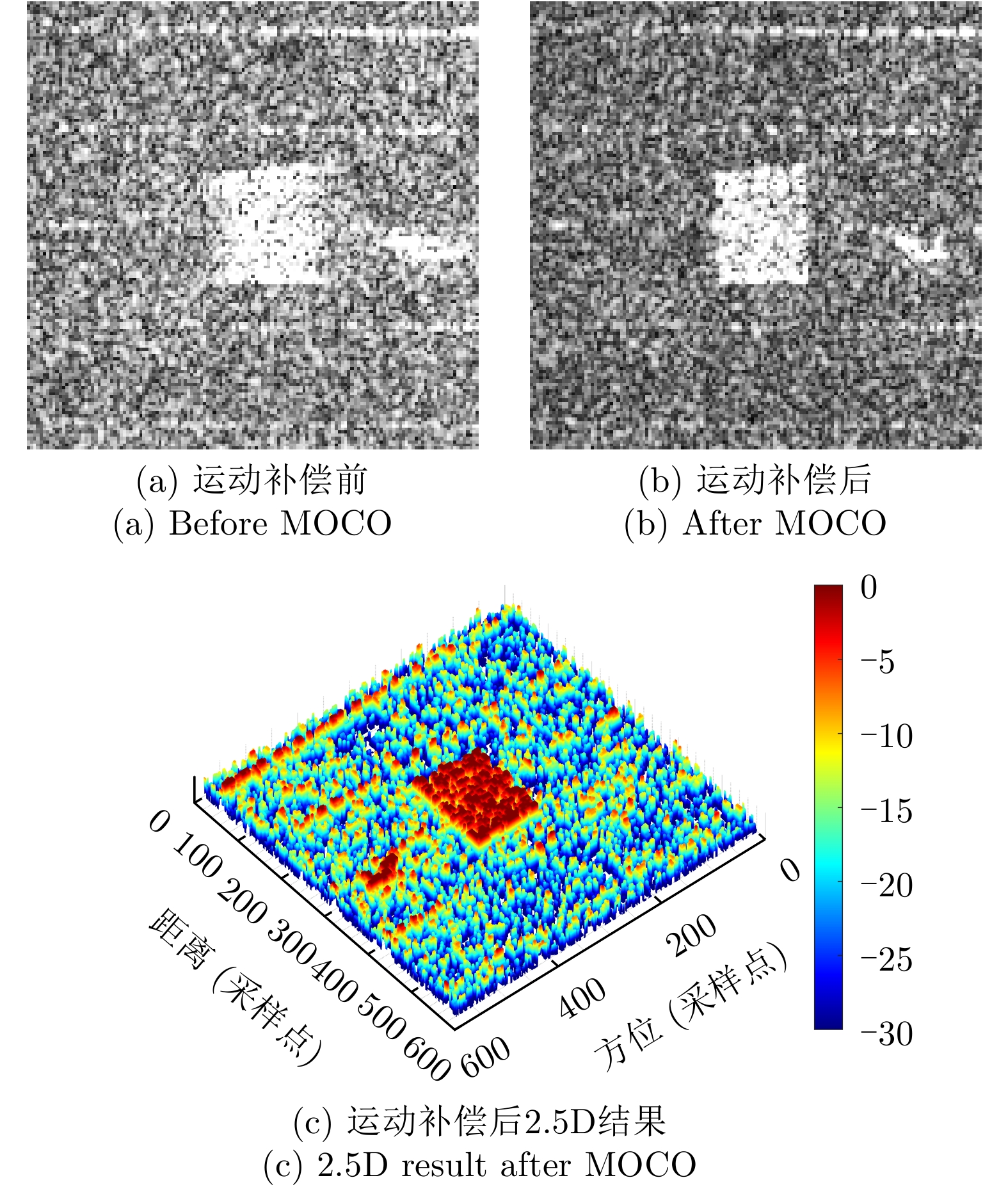
图 11 伪装网在运动补偿前后的局部图以及 2.5D重构图
Figure 11. Zoom-in images of camouflage mat before and after MOCO
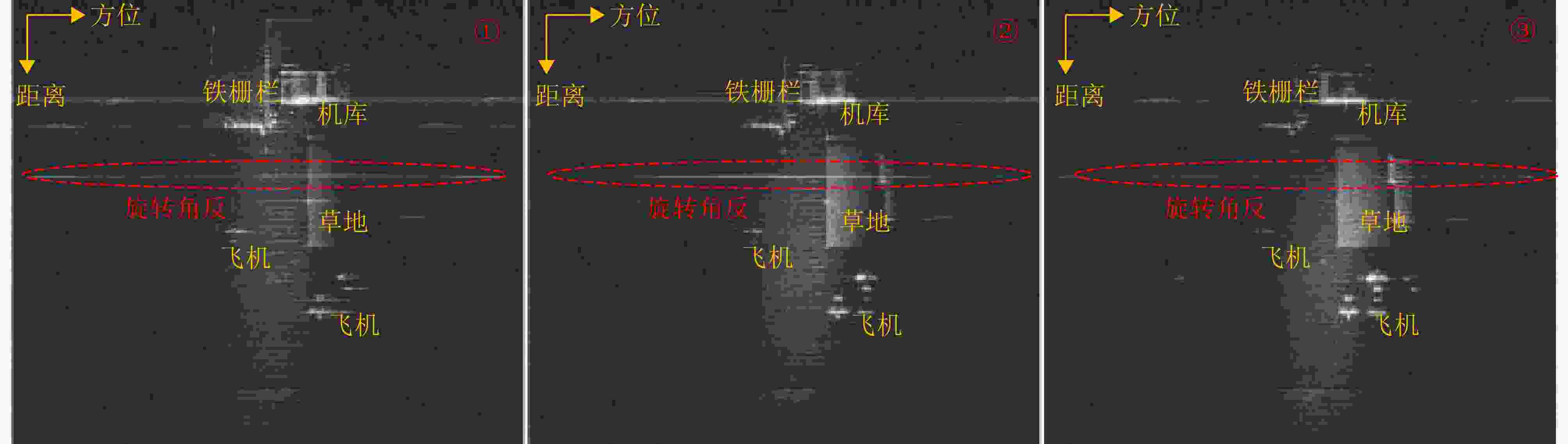
图 12 关于旋转角反的连续3帧整体成像结果
Figure 12. Three consecutive frames of scene containing rotating reflector

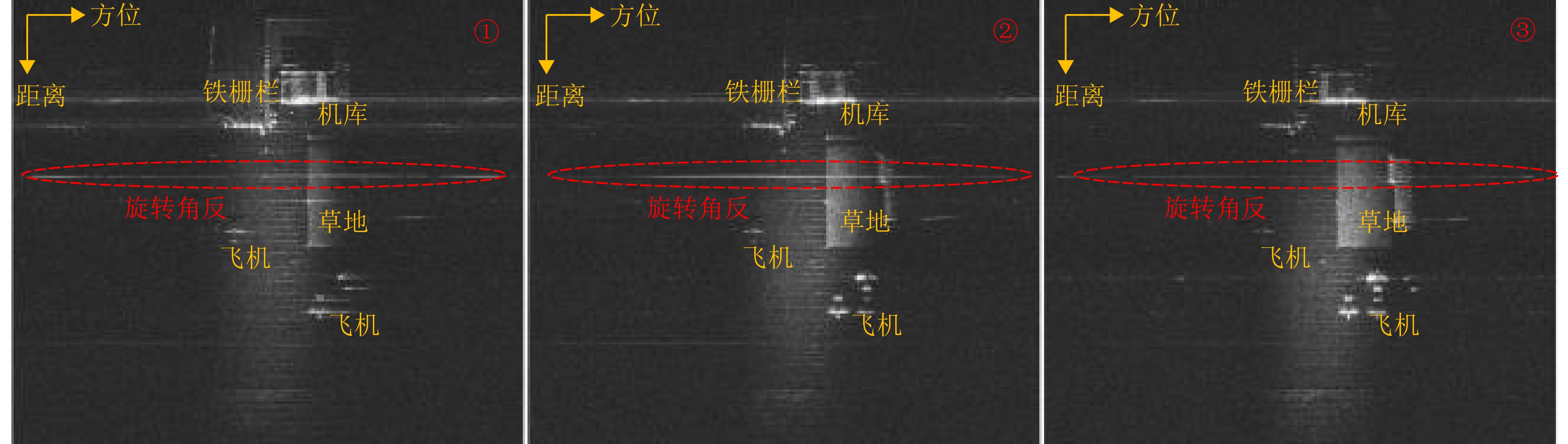
图 13 旋转角反的3帧局部放大图
Figure 13. Local zoom-in images of rotating reflectors under three frames
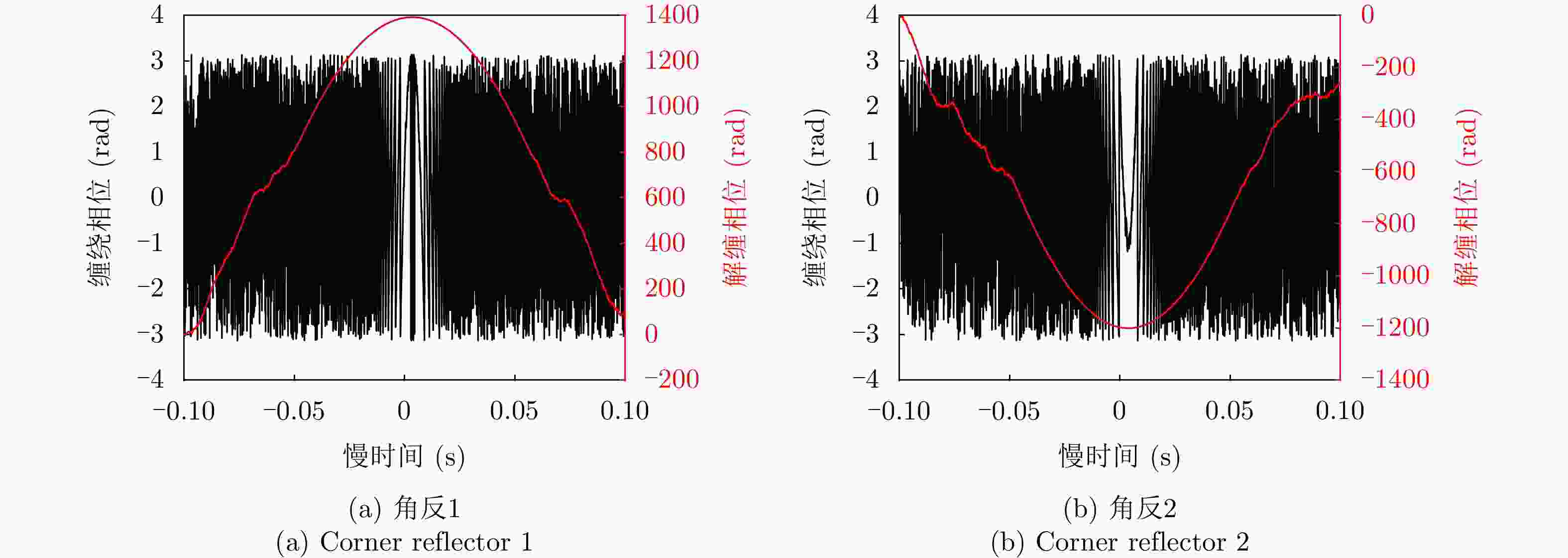
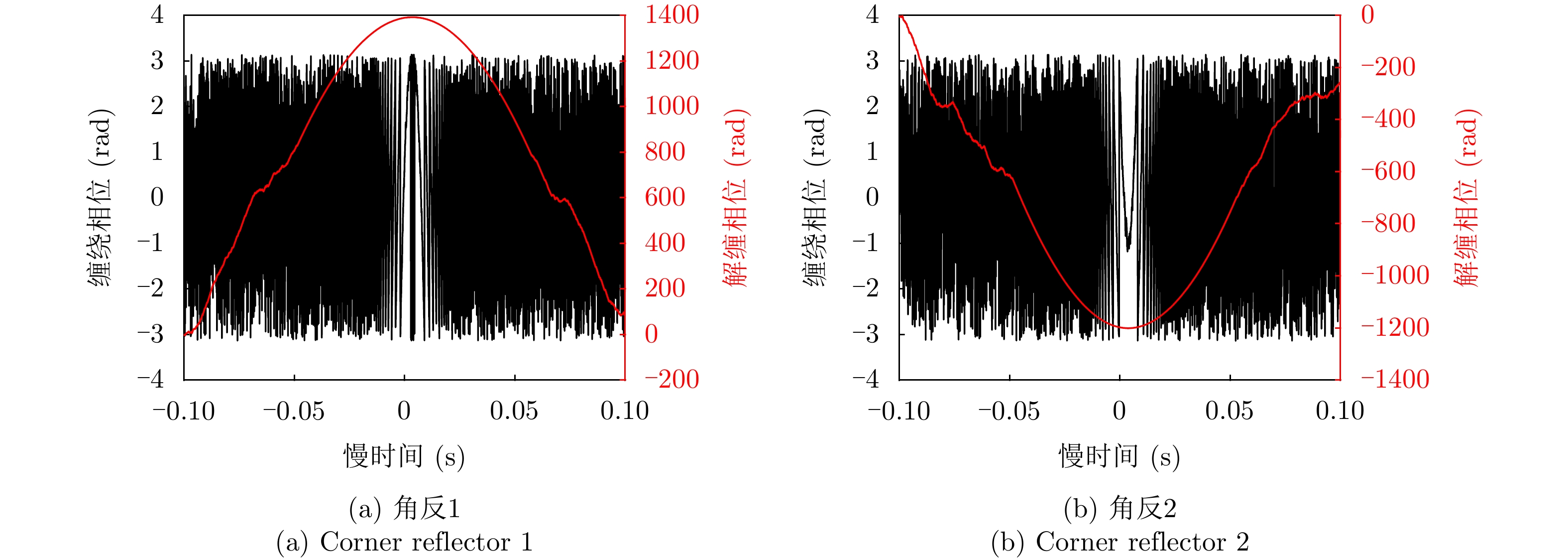
图 14 帧#2下两个旋转角反的感兴趣信号原始相位与解缠相位
Figure 14. Raw phases and unwrapped phases of signals of interests from two corner reflectors under frame #2

图 15 3帧下重构的旋转角反
Figure 15. Reconstructed rotating corner reflectors under three frames
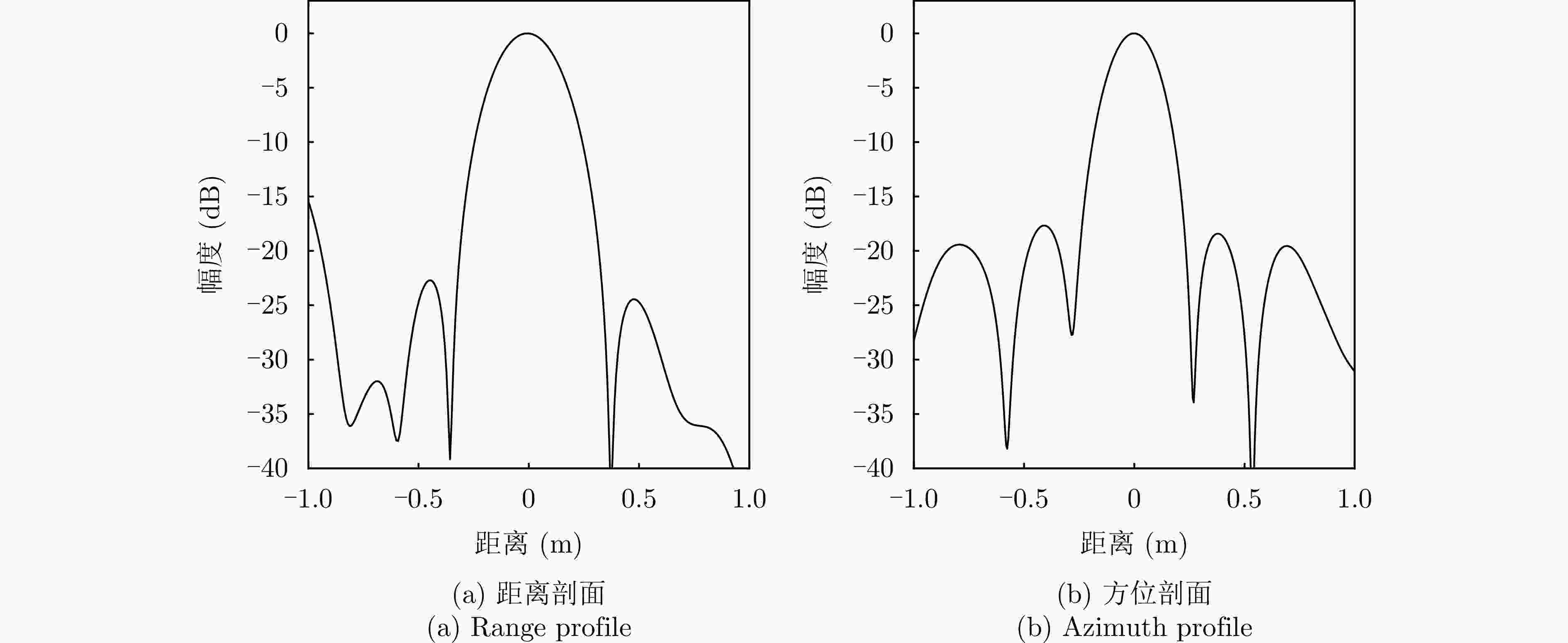
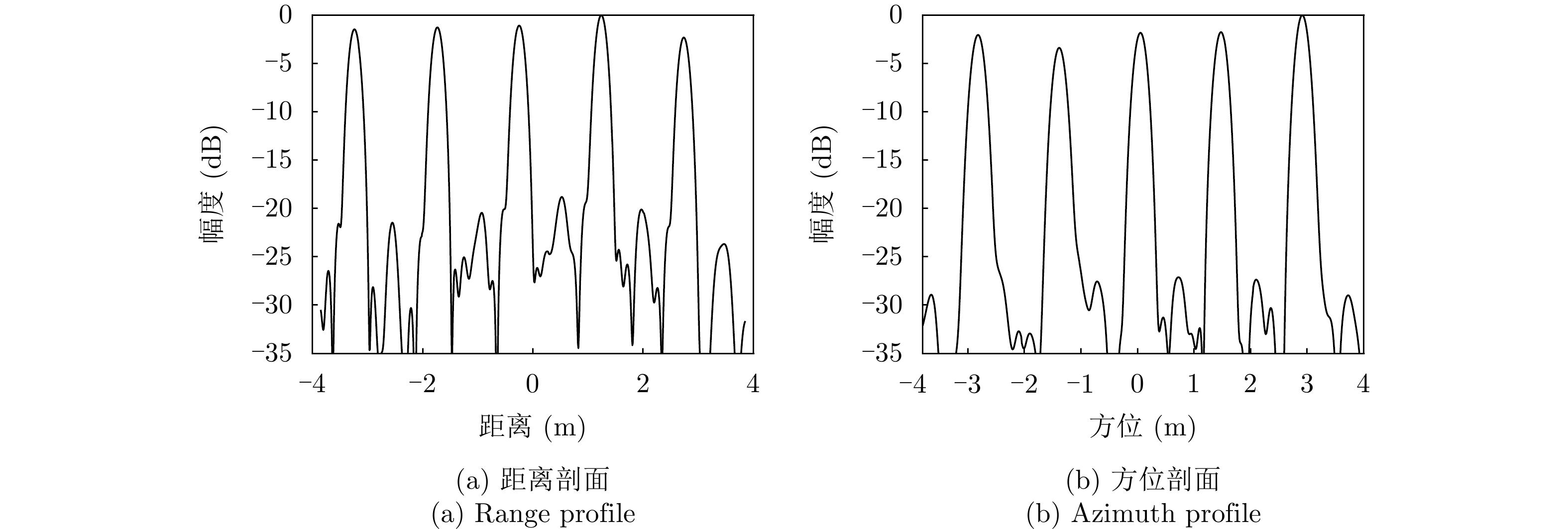
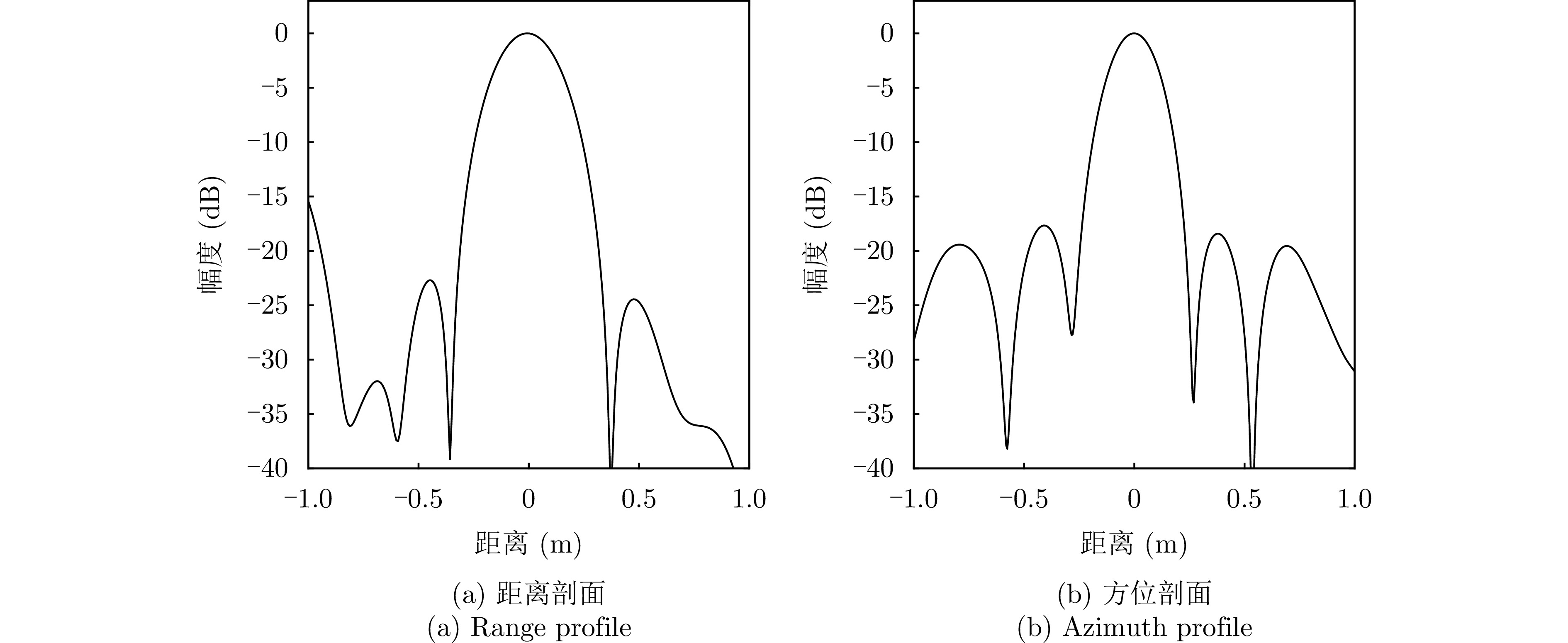
图 16 补偿后旋转角反的距离与方位剖面图
Figure 16. Range and azimuth profiles of the rotating corner reflector after compensation.
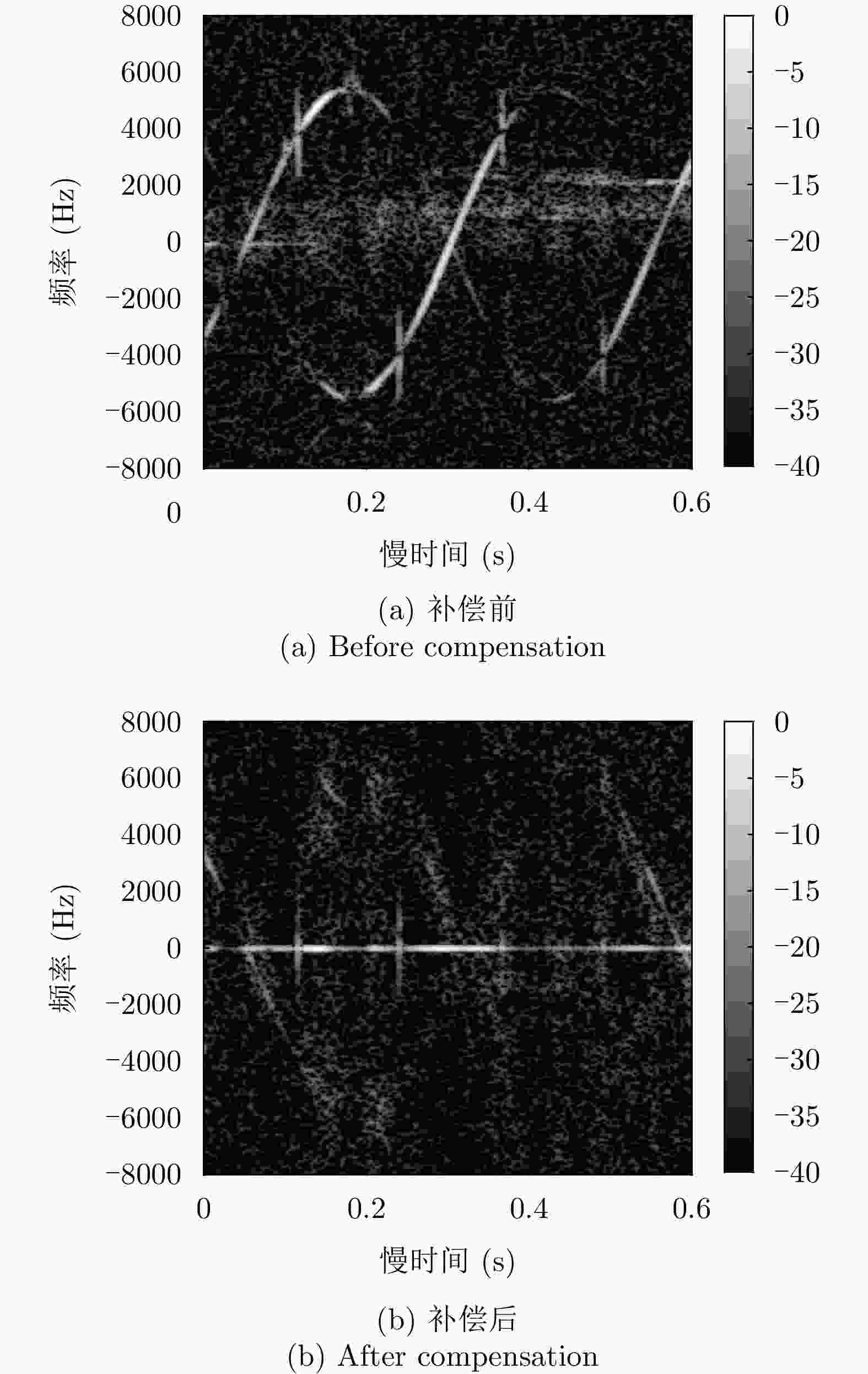
图 17 旋转角反成像补偿前后的时频图
Figure 17. Time-frequency images of rotating corner reflectors before and after compensation
表 1 太赫兹ViSAR系统参数
Table 1. Terahertz ViSAR system parameters
系统指标 数值 飞机型号 Cessna 208B 雷达载频 216 GHz 信号带宽 900 MHz 地距/方位分辨率 0.18 m/0.17 m 工作模式 条带模式 飞行速度 219.6 km/h 飞行高度 1.34 km 地面海拔 0.34 km 下视角 71.8° 脉冲重复频率 16 kHz 合成孔径时间 0.2 s 方位波束宽度 0.745° 成像帧率 5 Hz 极化方式 VV极化  下载: 导出CSV
下载: 导出CSV
-
[1] CUMMING I G and WONG F H. Digital Processing of Synthetic Aperture Radar Data[M]. Boston: Artech House, 2005: 13–78. [2] 李超, 李悦丽, 安道祥, 等. 基于视觉注意机制的UWB SAR叶簇隐蔽目标变化检测[J]. 电子学报, 2016, 44(1): 39–45. doi: 10.3969/j.issn.0372-2112.2016.01.007.LI Chao, LI Yueli, AN Daoxiang, et al. UWB SAR change detection of foliage-concealed targets based on visual attention[J]. Acta Electronica Sinica, 2016, 44(1): 39–45. doi: 10.3969/j.issn.0372-2112.2016.01.007. [3] SONG Juyoung, KIM D J, HWANG J H, et al. Effective vessel recognition in high resolution SAR images using quantitative and qualitative training data enhancement from target velocity phase refocusing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5201714. doi: 10.1109/TGRS.2023.3346171. [4] ZHU Xiaoxiang and BAMLER R. Very high resolution spaceborne SAR tomography in urban environment[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(12): 4296–4308. doi: 10.1109/TGRS.2010.2050487. [5] 邓彬, 吴称光, 秦玉亮, 等. 合成孔径雷达微动目标指示(SAR/MMTI)研究进展[J]. 电子学报, 2013, 41(12): 2436–2442. doi: 10.3969/j.issn.0372-2112.2013.12.018.DENG Bin, WU Chengguang, QIN Yuliang, et al. Advances in synthetic aperture radar micro-motion target indication (SAR/MMTI)[J]. Acta Electronica Sinica, 2013, 41(12): 2436–2442. doi: 10.3969/j.issn.0372-2112.2013.12.018. [6] WANG Qi, PEPIN M, WRIGHT A, et al. Reduction of vibration-induced artifacts in synthetic aperture radar imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(6): 3063–3073. doi: 10.1109/TGRS.2013.2269138. [7] FAN Lei, WANG Hongqiang, YANG Qi, et al. THz-ViSAR-Oriented fast indication and imaging of rotating targets based on nonparametric method[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5217515. doi: 10.1109/TGRS.2024.3427653. [8] 陈思伟, 崔兴超, 李铭典, 等. 基于深度CNN模型的SAR图像有源干扰类型识别方法[J]. 雷达学报, 2022, 11(5): 897–908. doi: 10.12000/JR22143.CHEN Siwei, CUI Xingchao, LI Mingdian, et al. SAR image active jamming type recognition based on deep CNN model[J]. Journal of Radars, 2022, 11(5): 897–908. doi: 10.12000/JR22143. [9] 孙光才, 白雪茹, 周峰, 等. 一种新的无源压制性SAR干扰方法[J]. 电子与信息学报, 2009, 31(3): 610–613. doi: 10.3724/SP.J.1146.2007.01885.SUN Guangcai, BAI Xueru, ZHOU Feng, et al. A new passive barrage jamming method for SAR[J]. Journal of Electronics & Information Technology, 2009, 31(3): 610–613. doi: 10.3724/SP.J.1146.2007.01885. [10] 全斯农, 范晖, 代大海, 等. 一种基于精细极化目标分解的舰船箔条云识别方法[J]. 雷达学报, 2021, 10(1): 61–73. doi: 10.12000/JR20123.QUAN Sinong, FAN Hui, DAI Dahai, et al. Recognition of ships and chaff clouds based on sophisticated polarimetric target decomposition[J]. Journal of Radars, 2021, 10(1): 61–73. doi: 10.12000/JR20123. [11] 吴国庆, 王罗胜斌, 庞晨, 等. 雷达极化域变焦角反组合体对抗方法: 抗冲淡式干扰[J]. 电子学报, 2022, 50(12): 2969–2983. doi: 10.12263/DZXB.20220979.WU Guoqing, WANG Luoshengbin, PANG Chen, et al. Radar polarization modulation countermeasures for combined corner reflector: Anti diluted jamming[J]. Acta Electronica Sinica, 2022, 50(12): 2969–2983. doi: 10.12263/DZXB.20220979. [12] 李玉鹏, 王吉军, 苏荣华, 等. 吸收散射型伪装遮障遮蔽性能仿真分析[J]. 防护工程, 2021, 43(2): 68–72. doi: 10.3969/j.issn.1674-1854.2021.02.010.LI Yupeng, WANG Jijun, SU Ronghua, et al. Simulation analysis of the shielding performance of absorption-scattering camouflage barrier[J]. Protective Engineering, 2021, 43(2): 68–72. doi: 10.3969/j.issn.1674-1854.2021.02.010. [13] LI Xiang, DENG Bin, QIN Yuliang, et al. The influence of target micromotion on SAR and GMTI[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(7): 2738–2751. doi: 10.1109/TGRS.2011.2104965. [14] 王雪松. 雷达极化技术研究现状与展望[J]. 雷达学报, 2016, 5(2): 119–131. doi: 10.12000/JR16039.WANG Xuesong. Status and prospects of radar polarimetry techniques[J]. Journal of Radars, 2016, 5(2): 119–131. doi: 10.12000/JR16039. [15] FAN Lei, WANG Hongqiang, YANG Qi, et al. High-quality airborne terahertz video SAR imaging based on echo-driven robust motion compensation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 2001817. doi: 10.1109/TGRS.2024.3357697. [16] LI Yuliang, LIU Jialu, LI Jin, et al. An extend Kaiser distribution optimization phase compensation algorithm for terahertz airborne SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5215815. doi: 10.1109/TGRS.2024.3420788. [17] ZHANG Ye, WANG Hongqiang, ZENG Yang, et al. Three-dimensional surface reconstruction of space targets using a terahertz MIMO linear array based on multilayer wideband frequency interferometry techniques[J]. IEEE Transactions on Terahertz Science and Technology, 2021, 11(4): 353–366. doi: 10.1109/TTHZ.2021.3067171. [18] LI Yuliang, MIN Rui, LI Jin, et al. Terahertz circular SAR imaging algorithm based on the extraction of scattering characteristics of target structures[J]. IEEE Geoscience and Remote Sensing Letters, 2024, 21: 3504905. doi: 10.1109/LGRS.2024.3379171. [19] FAN Lei, WANG Hongqiang, YANG Qi, et al. High frame-rate and low-latency video SAR based on robust Doppler parameters estimation in the terahertz regime[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5207016. doi: 10.1109/TGRS.2023.3271310. [20] 吴涵, 吴福伟, 尚士泽, 等. 太赫兹视频SAR多普勒中心估计方法[J]. 太赫兹科学与电子信息学报, 2022, 20(11): 1123–1129. doi: 10.11805/TKYDA2021295.WU Han, WU Fuwei, SHANG Shize, et al. Doppler centroid frequency estimation method based on THz video-SAR[J]. Journal of Terahertz Science and Electronic Information Technology, 2022, 20(11): 1123–1129. doi: 10.11805/TKYDA2021295. [21] DAMINI A, BALAJI B, PARRY C, et al. A videoSAR mode for the x-band wideband experimental airborne radar[C]. SPIE 7699, Algorithms for Synthetic Aperture Radar Imagery XVII, Orlando, USA, 2010: 76990E. doi: 10.1117/12.855376. [22] WELLS L, SORENSEN K, DOERRY A, et al. Developments in SAR and IFSAR systems and technologies at sandia national laboratories[C]. 2003 IEEE Aerospace Conference Proceedings, Big Sky, USA, 2003: 1085–1095. doi: 10.1109/AERO.2003.1235522. [23] FRIOUD M, WAHLEN A, WELLIG P, et al. Processing of MIRANDA35 FMCW-SAR data using a time-domain algorithm[C]. 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 2014: 1–4. [24] PALM S, SOMMER R, JANSSEN D, et al. Airborne circular W-band SAR for multiple aspect urban site monitoring[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(9): 6996–7016. doi: 10.1109/TGRS.2019.2909949. [25] KIM S H, FAN R, and DOMINSKI F. ViSAR: A 235 GHz radar for airborne applications[C]. 2018 IEEE Radar Conference, Oklahoma, USA, 2018: 1549–1554. doi: 10.1109/RADAR.2018.8378797. [26] 王宏强, 邓彬, 秦玉亮. 太赫兹雷达技术[J]. 雷达学报, 2018, 7(1): 1–21. doi: 10.12000/JR17107.WANG Hongqiang, DENG Bin, and QIN Yuliang. Review of terahertz radar technology[J]. Journal of Radars, 2018, 7(1): 1–21. doi: 10.12000/JR17107. [27] XING Mengdao, JIANG Xiuwei, WU Renbiao, et al. Motion compensation for UAV SAR based on raw radar data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(8): 2870–2883. doi: 10.1109/TGRS.2009.2015657. [28] GAO Jingkun, QIN Yuliang, DENG Bin, et al. Terahertz wide-angle imaging and analysis on plane-wave criteria based on inverse synthetic aperture techniques[J]. Journal of Infrared, Millimeter, and Terahertz Waves, 2016, 37(4): 373–393. doi: 10.1007/s10762-016-0249-x. [29] 丁金闪, 仲超, 温利武, 等. 视频合成孔径雷达双域联合运动目标检测方法[J]. 雷达学报, 2022, 11(3): 313–323. doi: 10.12000/JR22036.DING Jinshan, ZHONG Chao, WEN Liwu, et al. Joint detection of moving target in video synthetic aperture radar[J]. Journal of Radars, 2022, 11(3): 313–323. doi: 10.12000/JR22036. [30] KHOSRAVI M R and SAMADI S. Mobile multimedia computing in cyber-physical surveillance services through UAV-borne Video-SAR: A taxonomy of intelligent data processing for IoMT-enabled radar sensor networks[J]. Tsinghua Science and Technology, 2022, 27(2): 288–302. doi: 10.26599/TST.2021.9010013. [31] 赵雨露, 张群英, 李超, 等. 视频合成孔径雷达振动误差分析及补偿方案研究[J]. 雷达学报, 2015, 4(2): 230–239. doi: 10.12000/JR14153.ZHAO Yulu, ZHANG Qunying, LI Chao, et al. Vibration error analysis and motion compensation of video synthetic aperture radar[J]. Journal of Radars, 2015, 4(2): 230–239. doi: 10.12000/JR14153. [32] 李亚超, 王家东, 张廷豪, 等. 弹载雷达成像技术发展现状与趋势[J]. 雷达学报, 2022, 11(6): 943–973. doi: 10.12000/JR22119.LI Yachao, WANG Jiadong, ZHANG Tinghao, et al. Present situation and prospect of missile-borne radar imaging technology[J]. Journal of Radars, 2022, 11(6): 943–973. doi: 10.12000/JR22119. -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

