
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Closed Space SAR Multipath Suppression Method Based on Multi-angle Dual-layer Deviation Measurement
-
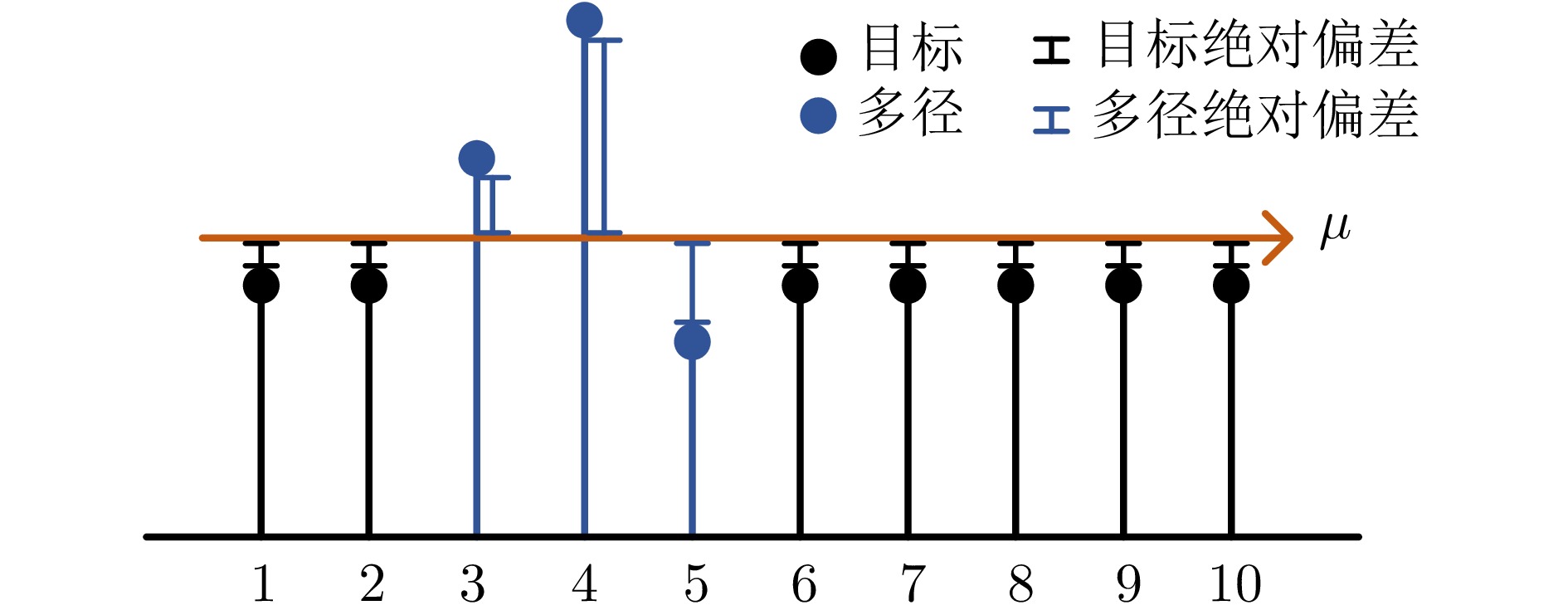
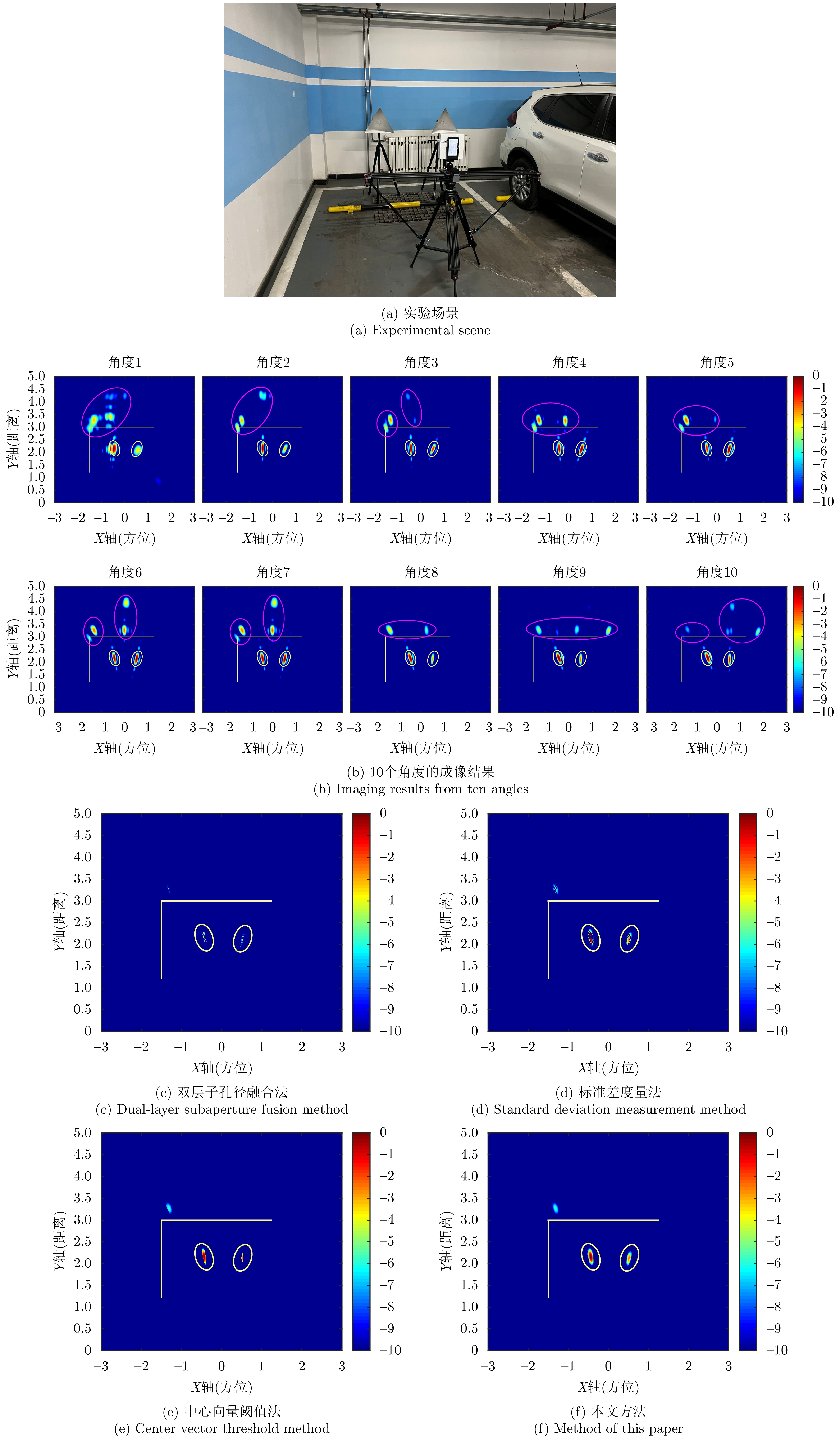
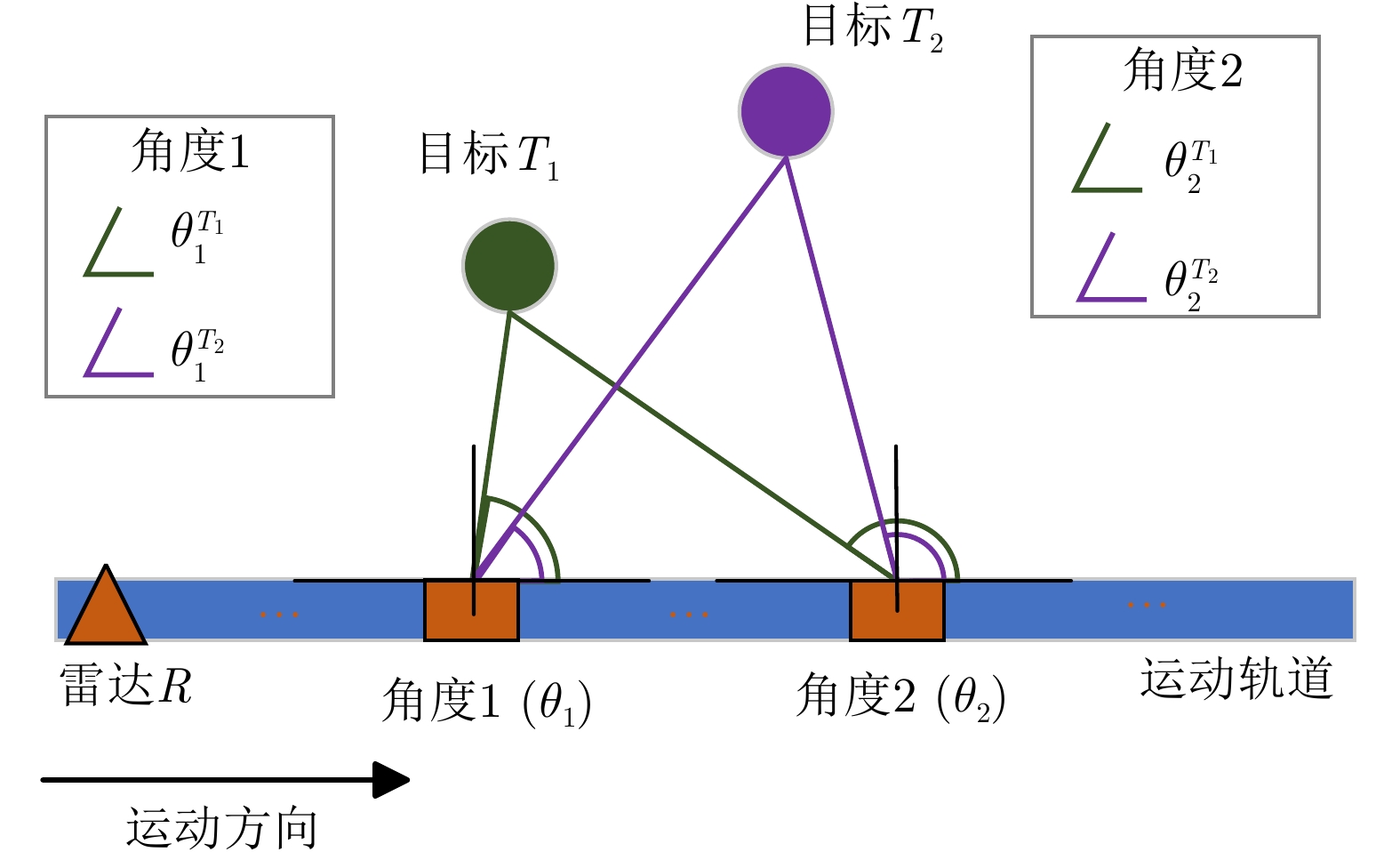
摘要: 合成孔径雷达(SAR)具有全天时全天候非接触式监测的优势,是封闭空间安全监测的重要工具。然而,SAR应用于复杂封闭空间时,易受多径效应影响,导致图像存在大量虚像,严重影响判读。现有方法需要场景先验进行多径推算或通过子孔径加权融合抑制多径,但都难以准确区分多径虚像与目标图像。该文提出了一种新的多角度双层偏差度量方法,可有效获取多径虚像与目标间的特征差异。该方法首先采用大视角差对观测场景进行多角度观测,可充分利用多径虚像位置随观测角度变化,而实际目标位置保持不变的特性。然后使用双层偏差度量算法,该算法根据多径在多角度序列中的稀疏性,两次计算序列幅度值与序列均值的偏差,精准检测出稀疏、不稳定的多径成分并去除,对剩余稳定成分取均值。这样,在保留目标信息的同时有效抑制多径。最后,仿真和毫米波雷达实际数据处理验证了该文方法的有效性。Abstract: Synthetic Aperture Radar (SAR) has the advantage of noncontact monitoring around the clock and is an important tool for closed space security monitoring. However, when SAR is employed in complex closed spaces, it is susceptible to multipath effects, resulting in a considerable number of virtual images in the image, which has a detrimental impact on interpretation. Existing methods require scene priors for multipath estimation or subaperture weighted fusion to suppress multipath; however, accurately distinguishing multipath virtual images from target images is challenging. This paper proposes a novel multi-angle dual-layer deviation measurement method that effectively distinguishes multipath virtual images from targets. The proposed method employs a large viewing angle difference to conduct multi-angle observation of the target scene, capitalizing on the fact that the position of the multipath virtual image varies with the observation angle, whereas the actual target position remains constant; this is followed by applying a dual-layer deviation measurement algorithm. The algorithm calculates the deviation between the sequence amplitude value and mean twice based on the sparsity of multipath in the multiangle sequence. The proposed method accurately detects and removes sparse and unstable multipath components, whereas the remaining stable components are averaged. This effectively suppresses multipath while retaining target information. Finally, the simulation and actual millimeter wave radar data processing verified the effectiveness of the proposed method.
-
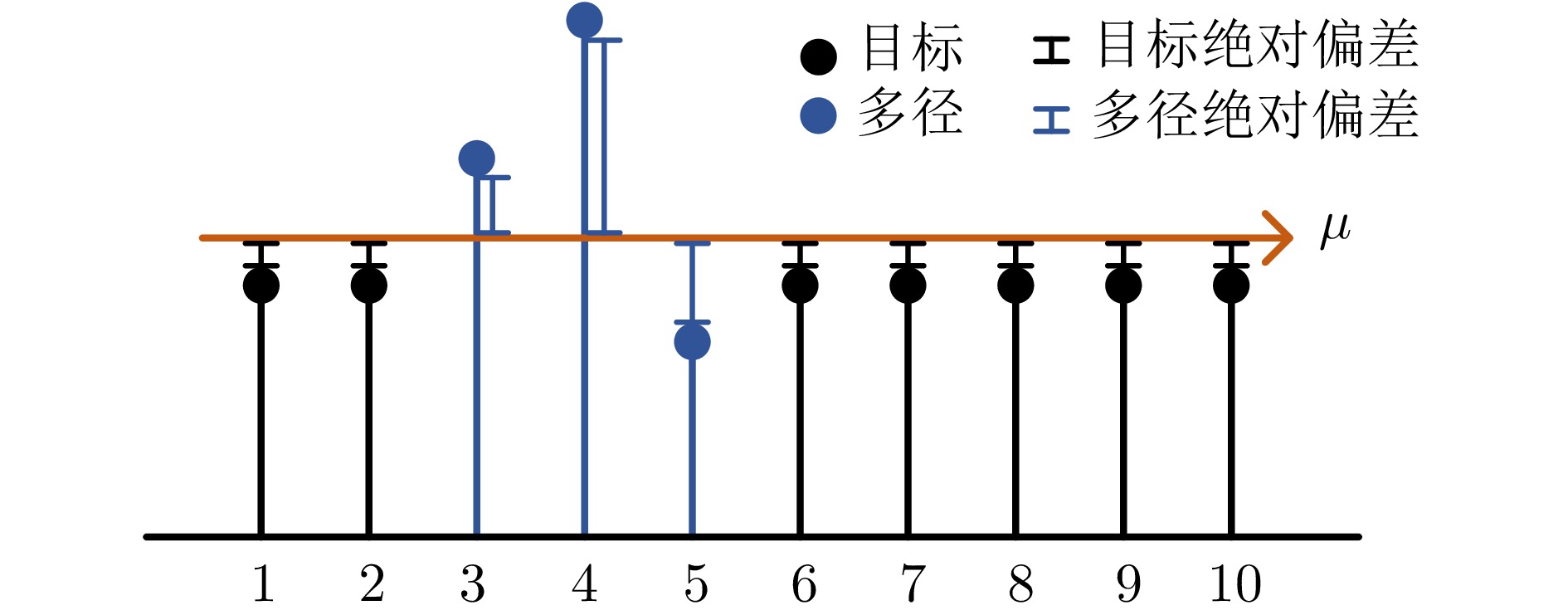
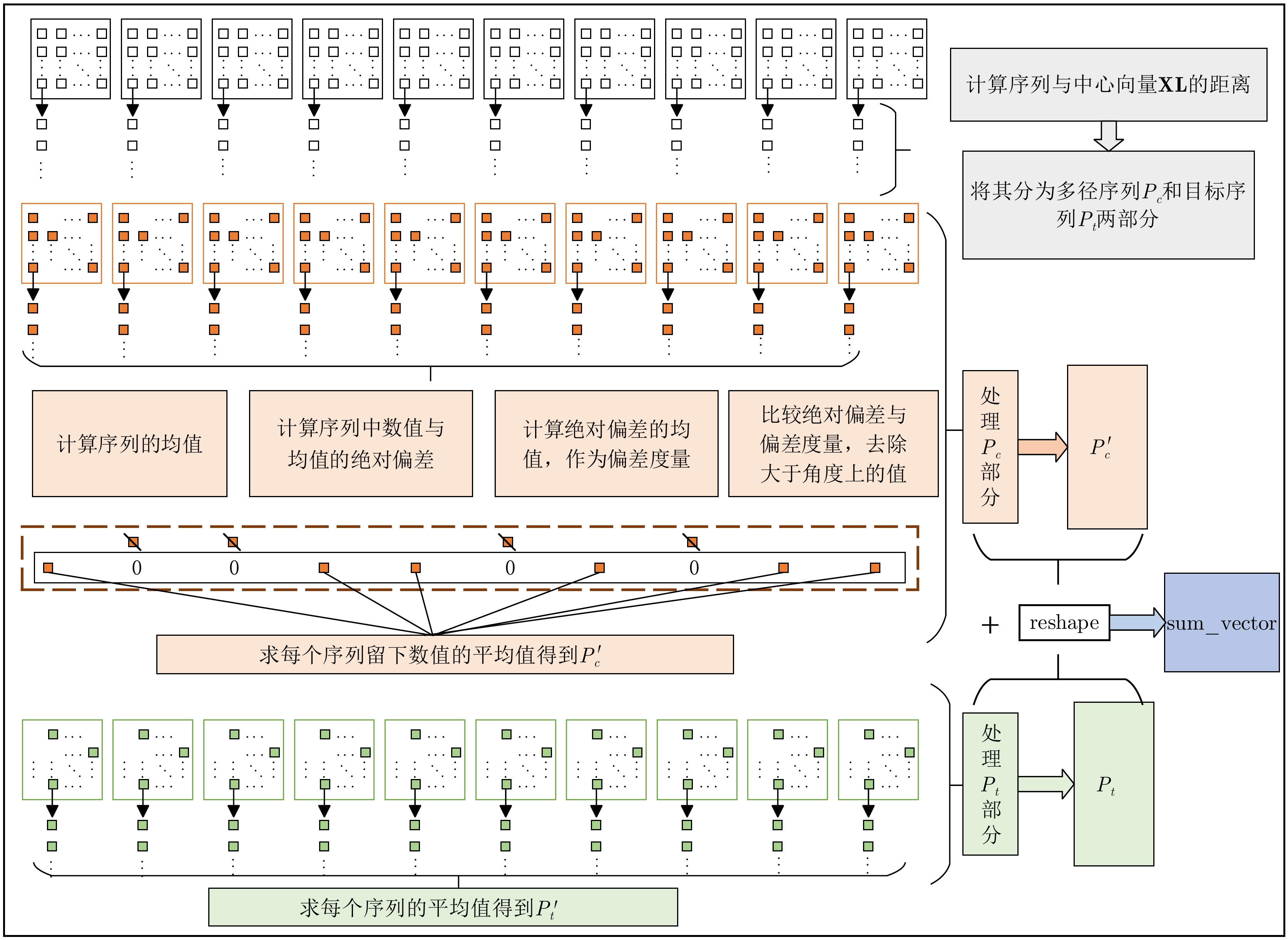
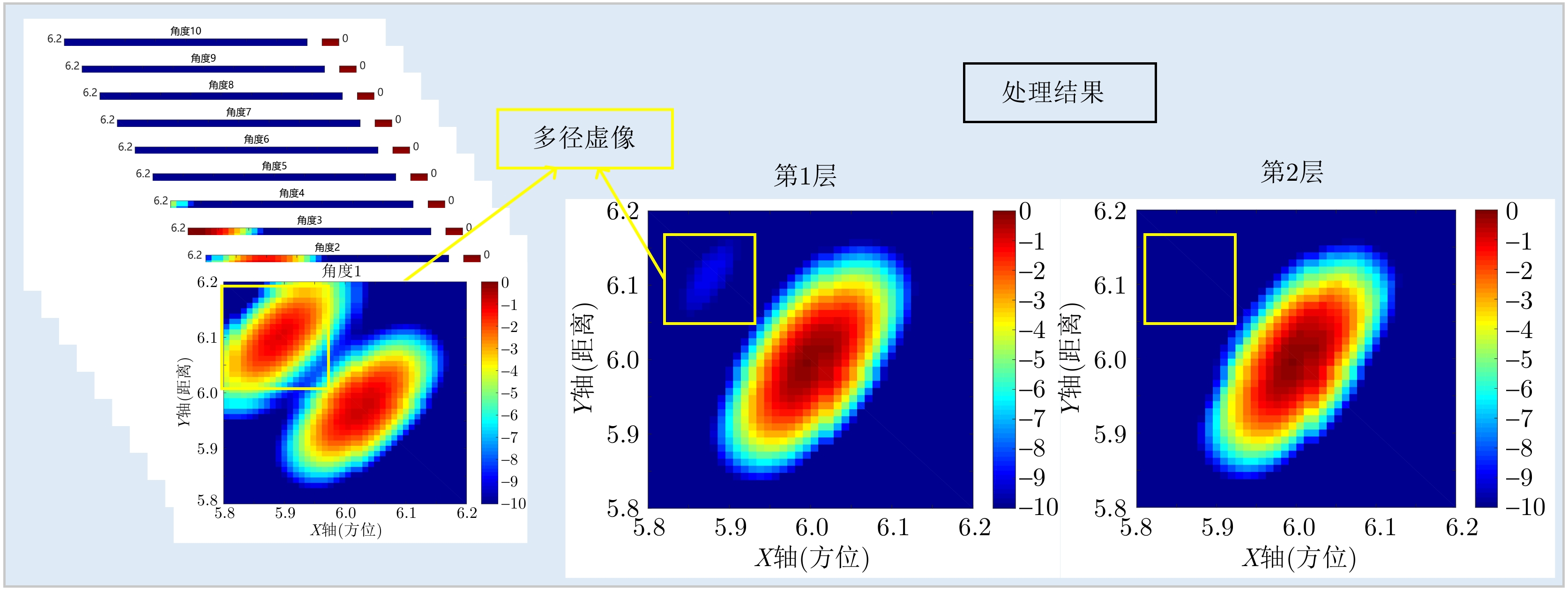
图 4 双层阈值偏差算法示意图
Figure 4. Schematic diagram of dual-layer threshold deviation algorithm
1 多角度序列融合算法
1. Multi-angle sequence fusion algorithm
输入:Pc, Pt 输出:sum_vector 1 // Phase 1: process Pc 2 for i = 1 : length(Pc) do 3 $\mu $= mean(Pc[i]); //calculate average 4 ${\delta _f}$ = |Pc[i]-$\mu $|; //calculate deviations 5 $\overline \delta $ = mean(${\delta _f}$); //calculate deviations metric 6 validvalues = {x∈Pc[i] | x-$\mu $≤$\overline \delta $}; 7 if validvalues ≠ 0 then 8 $P'_c $[i] = mean(validvalues); 9 else 10 $P'_c $[i] = 0; 11 end 12 end 13 // Phase 2: process Pt 14 $P'_t $ = mean(Pt,2); 15 // Phase 3: sequence fusion 16 $ P'_{ct} $ = $P'_c $ + $P'_t $; 17 sum_vector = reshape($P'_{ct} $).  下载: 导出CSV
下载: 导出CSV
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 中心频率 77 GHz 带宽 600 MHz 方位向采样点数 2048 距离向采样点数 1024 轨道长度 1.2 m 频率间隔 585.94 kHz 距离分辨率 0.2498 m孔径长度 0.1 m
下载: 导出CSV
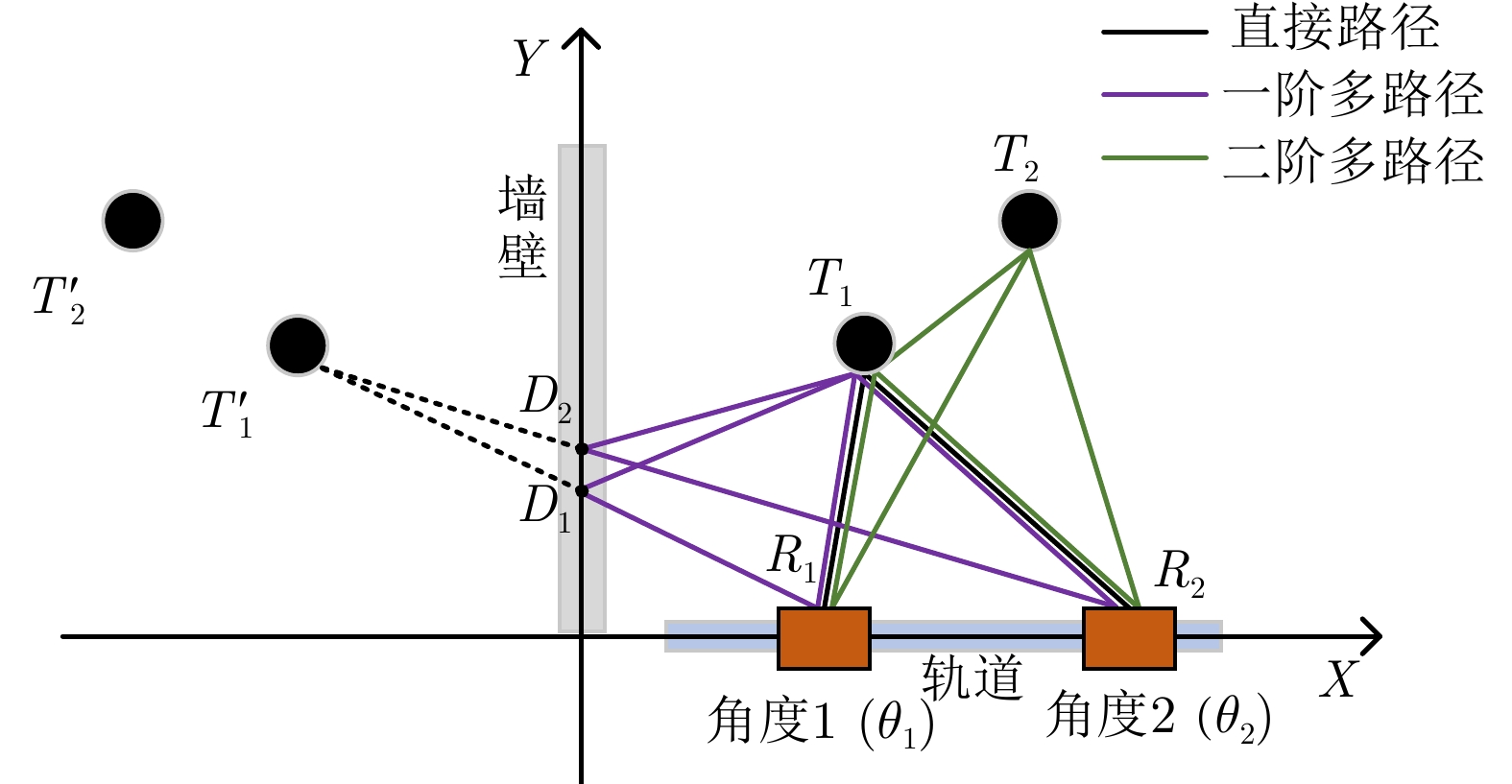
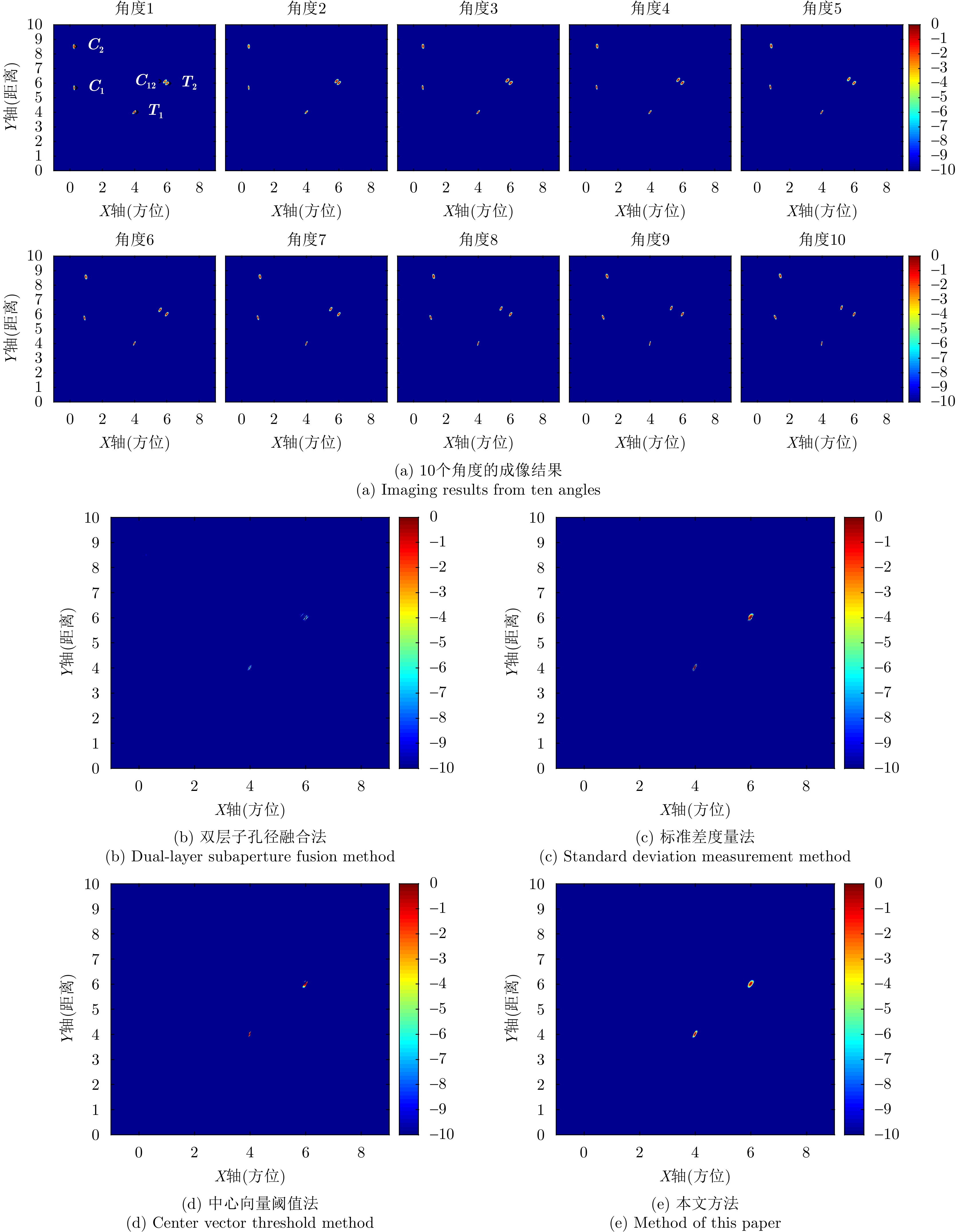
表 2 10个角度下多径虚像的位置坐标(m)
Table 2. Position coordinates of multipath virtual image at ten angles (m)
角度 C1 C2 C12 角度1 (0.28, 5.67) (0.29, 8.49) (5.90, 6.11) 角度2 (0.43, 5.69) (0.44, 8.50) (5.87, 6.13) 角度3 (0.58, 5.69) (0.59, 8.51) (5.80, 6.17) 角度4 (0.70, 5.71) (0.73, 8.52) (5.75, 6.21) 角度5 (0.82, 5.72) (0.88, 8.53) (5.67, 6.26) 角度6 (0.92, 5.75) (1.01, 8.55) (5.59, 6.13) 角度7 (1.00, 5.77) (1.13, 8.57) (5.50, 6.35) 角度8 (1.07, 5.79) (1.25, 8.59) (5.41, 6.39) 角度9 (1.10, 5.80) (1.35, 8.60) (5.32, 6.42) 角度10 (1.12, 5.81) (1.44, 8.63) (5.22, 6.46)
下载: 导出CSV
表 3 实验参数
Table 3. Experimental parameters
参数 数值 载频 77 GHz 发射天线数量 2 接收天线数量
使用通道数4
1带宽 514.14 MHz ADC采样率 12500 ksps总采集时间 120 s 轨道长度 1.2 m 帧数目 60000 采样点数 512 单帧时长 2 ms 子孔径长度 0.1 m
下载: 导出CSV
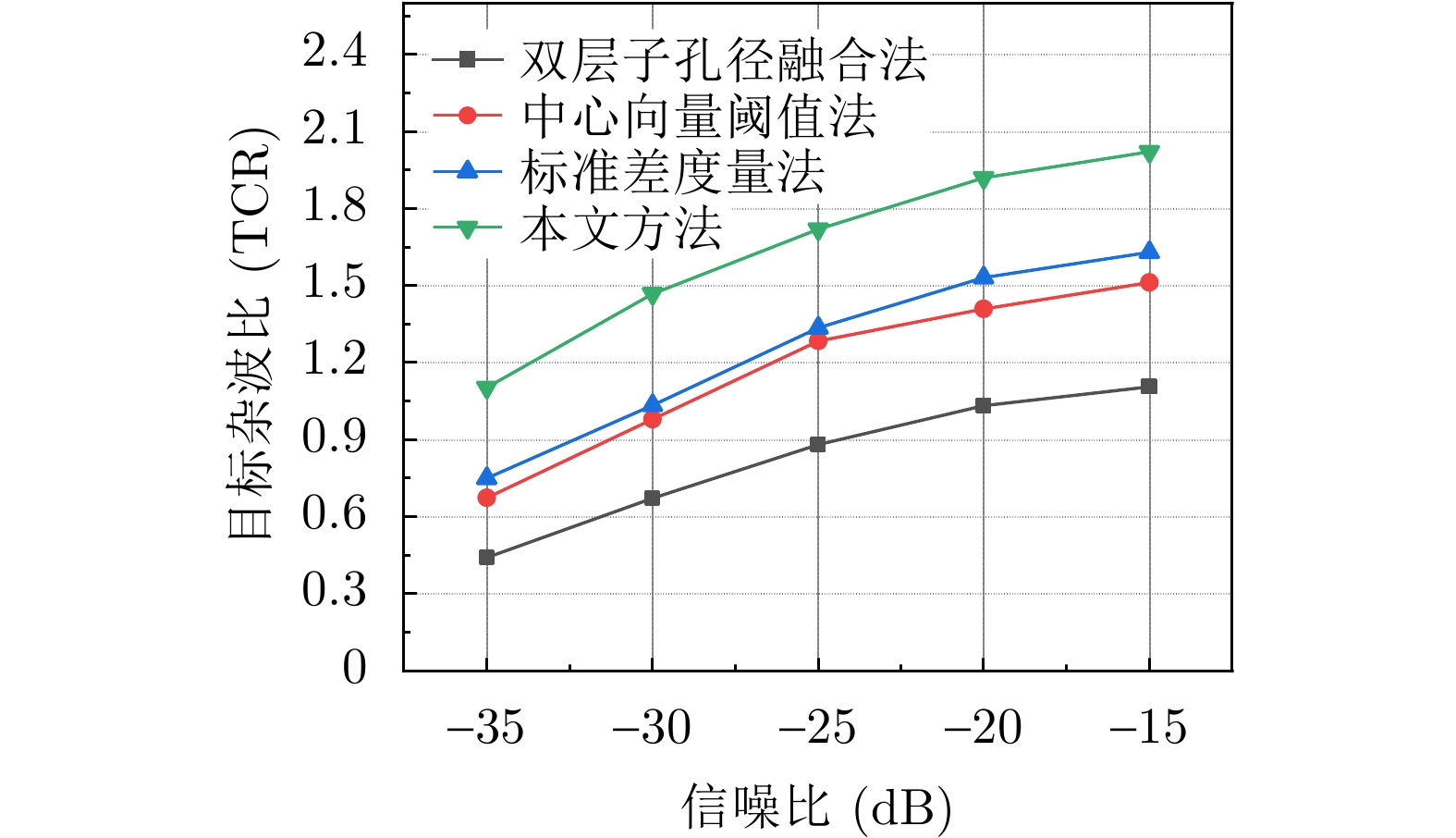
表 4 TCR性能对比
Table 4. TCR performance comparison
方法 实验1 实验2 双层子孔径融合法 1.796 14.194 标准差度量法 2.407 22.725 中心向量阈值法 2.481 24.887 本文方法 3.096 27.162
下载: 导出CSV
-
[1] ANGHEL A, VASILE G, CACOVEANU R, et al. Scattering centers detection and tracking in refocused spaceborne SAR images for infrastructure monitoring[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(8): 4379–4393. doi: 10.1109/TGRS.2015.2396773. [2] MA Peifeng, LIN Hui, WANG Weixi, et al. Toward fine surveillance: A review of multitemporal interferometric synthetic aperture radar for infrastructure health monitoring[J]. IEEE Geoscience and Remote Sensing Magazine, 2022, 10(1): 207–230. doi: 10.1109/MGRS.2021.3098182. [3] CAO Jiaxuan, DING Yipeng, PENG Yiqun, et al. A machine learning-based algorithm for through-wall target tracking by Doppler TWR[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 8501609. doi: 10.1109/TIM.2024.3369133. [4] XU Hang, LI Yong, LI Yingxin, et al. Through-wall human motion recognition using random code radar sensor with multi-domain feature fusion[J]. IEEE Sensors Journal, 2022, 22(15): 15123–15132. doi: 10.1109/JSEN.2022.3183292. [5] CHAN Y K and KOO V C. An introduction to synthetic aperture radar (SAR)[J]. Progress In Electromagnetics Research B, 2008, 2: 27–60. doi: 10.2528/PIERB07110101. [6] WEI Ziping, LI Bin, FENG Tao, et al. Area-based CFAR target detection for automotive millimeter-wave radar[J]. IEEE Transactions on Vehicular Technology, 2023, 72(3): 2891–2906. doi: 10.1109/TVT.2022.3216013. [7] IHMEIDA M and SHAHZAD M. Enhanced change detection performance based on deep despeckling of synthetic aperture radar images[J]. IEEE Access, 2023, 11: 95734–95746. doi: 10.1109/ACCESS.2023.3307208. [8] HOSSEINY B, AMINI J, and AGHABABAEI H. Structural displacement monitoring using ground-based synthetic aperture radar[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 116: 103144. doi: 10.1016/j.jag.2022.103144. [9] FENG Ruoyu, DE GREEF E, RYKUNOV M, et al. Multipath ghost recognition for indoor MIMO radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5104610. doi: 10.1109/TGRS.2021.3109381. [10] LUO Haolan, ZHU Zhihao, JIANG Meiqiu, et al. An effective multipath ghost recognition method for sparse MIMO radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5111611. doi: 10.1109/TGRS.2023.3335454. [11] 孔令讲, 郭世盛, 陈家辉, 等. 多径利用雷达目标探测技术综述与展望[J]. 雷达学报, 2024, 13(1): 23–45. doi: 10.12000/JR23134.KONG Lingjiang, GUO Shisheng, CHEN Jiahui, et al. Overview and prospects of multipath exploitation radar target detection technology[J]. Journal of Radars, 2024, 13(1): 23–45. doi: 10.12000/JR23134. [12] SETLUR P, SMITH G E, AHMAD F, et al. Target localization with a single sensor via multipath exploitation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 1996–2014. doi: 10.1109/TAES.2012.6237575. [13] SETLUR P, AMIN M, and AHMAD F. Multipath model and exploitation in through-the-wall and urban radar sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 4021–4034. doi: 10.1109/TGRS.2011.2128331. [14] PARK J K, PARK J H, and KIM K T. Multipath signal mitigation for indoor localization based on MIMO FMCW radar system[J]. IEEE Internet of Things Journal, 2024, 11(2): 2618–2629. doi: 10.1109/JIOT.2023.3292349. [15] DING Rui, WANG Zhuang, JIANG Libing, et al. Radar target localization with multipath exploitation in dense clutter environments[J]. Applied Sciences, 2023, 13(4): 2032. doi: 10.3390/app13042032. [16] 谭云华, 王李波, 李廉林. 一种抑制探地/穿墙成像多径虚假目标的新型概率模型: 数值研究[J]. 雷达学报, 2015, 4(5): 509–517. doi: 10.12000/JR15066.TAN Yunhua, WANG Libo, and LI Lianlin. A novel probability model for suppressing multipath ghosts in GPR and TWI imaging: A numerical study[J]. Journal of Radars, 2015, 4(5): 509–517. doi: 10.12000/JR15066. [17] AN Daoxiang, WANG Wu, and CHEN Leping. Extended subaperture imaging method for airborne low frequency Ultrawideband SAR data[J]. Sensors, 2019, 19(20): 4516. doi: 10.3390/s19204516. [18] 李家强, 陈德昌, 陈金立, 等. 强杂波背景下穿墙成像雷达多径虚像抑制[J]. 雷达科学与技术, 2020, 18(2): 145–150, 155. doi: 10.3969/j.issn.1672-2337.2020.02.005.LI Jiaqiang, CHEN Dechang, CHEN Jinli, et al. Multipath virtual image suppression of through-the-wall imaging radar under strong clutter background[J]. Radar Science and Technology, 2020, 18(2): 145–150, 155. doi: 10.3969/j.issn.1672-2337.2020.02.005. [19] GUO Ping, WU Fuen, TANG Shiyang, et al. Implementation method of automotive video SAR (ViSAR) based on sub-aperture spectrum fusion[J]. Remote Sensing, 2023, 15(2): 476. doi: 10.3390/rs15020476. [20] 申文婷, 晋良念, 刘琦. 穿墙雷达室内多径机理分析与抑制方法[J]. 雷达科学与技术, 2016, 14(6): 605–613. doi: 10.3969/j.issn.1672-2337.2016.06.009.SHEN Wenting, JIN Liangnian, and LIU Qi. Through-the-wall radar indoor multipath mechanism analysis and mitigation strategies[J]. Radar Science and Technology, 2016, 14(6): 605–613. doi: 10.3969/j.issn.1672-2337.2016.06.009. [21] 屈乐乐, 杨永席, 杨天虹. 基于二维最小相位相干因子的MIMO穿墙雷达成像方法[J]. 电讯技术, 2021, 61(12): 1534–1539. doi: 10.3969/j.issn.1001-893x.2021.12.011.QU Lele, YANG Yongxi, and YANG Tianhong. MIMO through-the-wall radar imaging based on 2D minimum phase coherence factor[J]. Telecommunication Engineering, 2021, 61(12): 1534–1539. doi: 10.3969/j.issn.1001-893x.2021.12.011. [22] 许强, 金添, 邱磊. 基于多特征结合的MIMO穿墙雷达“鬼影”抑制[J]. 现代电子技术, 2015, 38(19): 1–7. doi: 10.3969/j.issn.1004-373X.2015.19.001.XU Qiang, JIN Tian, and QIU Lei. “Ghost” suppression for through-the-wall radar with MIMO antenna arrays based on multi-feature combination[J]. Modern Electronics Technique, 2015, 38(19): 1–7. doi: 10.3969/j.issn.1004-373X.2015.19.001. [23] FENG Ruoyu, DE GREEF E, RYKUNOV M, et al. Multipath ghost recognition and joint target tracking with wall estimation for indoor MIMO radar[J]. IEEE Transactions on Radar Systems, 2024, 2: 154–164. doi: 10.1109/TRS.2024.3354509. [24] YANG Yiping, CHEN Chuan, JIA Yong, et al. Non-line-of-sight target detection based on dual-view observation with single-channel UWB radar[J]. Remote Sensing, 2022, 14(18): 4532. doi: 10.3390/rs14184532. [25] ZHANG Wei, XU Zihan, GUO Shisheng, et al. MIMO through-wall-radar down-view imaging for moving target with ground ghost suppression[J]. Digital Signal Processing, 2023, 134: 103886. doi: 10.1016/j.dsp.2022.103886. [26] GUO Shisheng, CHEN Jiahui, SHI Zhenpeng, et al. Graph matching based image registration for multi-view through-the-wall imaging radar[J]. IEEE Sensors Journal, 2022, 22(2): 1486–1494. doi: 10.1109/JSEN.2021.3131326. [27] PEI Jifang, HUANG Yulin, HUO Weibo, et al. SAR automatic target recognition based on multiview deep learning framework[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(4): 2196–2210. doi: 10.1109/TGRS.2017.2776357. [28] QU Lele, WANG Chang’an, YANG Tianhong, et al. Enhanced through-the-wall radar imaging based on deep layer aggregation[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4023705. doi: 10.1109/LGRS.2022.3171714. [29] DING Lei, ZHENG Kai, LIN Dong, et al. MP-ResNet: Multipath residual network for the semantic segmentation of high-resolution PolSAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4014205. doi: 10.1109/LGRS.2021.3079925. [30] KANG M S and BAEK J M. SAR image reconstruction via incremental imaging with compressive sensing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 4450–4463. doi: 10.1109/TAES.2023.3241893. [31] TANG Junkui, LIU Zheng, RAN Lei, et al. Enhancing forward-looking image resolution: Combining low-rank and sparsity priors[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5100812. doi: 10.1109/TGRS.2023.3237332. [32] BONFERT C, RUOPP E, and WALDSCHMIDT C. Improving SAR imaging by superpixel-based compressed sensing and backprojection processing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5209212. doi: 10.1109/TGRS.2024.3385027. [33] LIN Yun, ZHAO Jiameng, WANG Yanping, et al. SAR multi-angle observation method for multipath suppression in enclosed spaces[J]. Remote Sensing, 2024, 16(4): 621. doi: 10.3390/rs16040621. [34] BERGER T and HAMRAN S E. Harmonic synthetic aperture radar processing[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(10): 2066–2069. doi: 10.1109/LGRS.2015.2447517. [35] 邢孟道, 马鹏辉, 楼屹杉, 等. 合成孔径雷达快速后向投影算法综述[J]. 雷达学报, 2024, 13(1): 1–22. doi: 10.12000/JR23183.XING Mengdao, MA Penghui, LOU Yishan, et al. Review of fast back projection algorithms in synthetic aperture radar[J]. Journal of Radars, 2024, 13(1): 1–22. doi: 10.12000/JR23183. -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

