
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Trajectory Planning Method for UAV-through-the-wall 3D SAR Based on a Genetic Algorithm
-
摘要: 传统手持或车载穿墙雷达由于架设高度受限,无法对城市高层建筑内部目标进行透视成像,无人机载穿墙雷达具有灵活机动、高效便捷、无高度限制等优势,可对城市高层楼宇进行大范围三维穿透探测。三维层析合成孔径雷达(SAR)成像广泛采用多基线扫描模式,以获得高度向高分辨能力,但存在高度向空域欠采样导致的栅瓣问题。对此,该文提出一种基于遗传算法的无人机载穿墙三维SAR航迹规划方法,通过非均匀化飞行航迹,削弱周期性的雷达回波能量叠加,从而抑制栅瓣、实现更优的成像质量。该算法结合飞行距离与无人机载穿墙雷达成像质量的内在关系,建立了无人机航迹规划代价函数;利用遗传算法对3种典型的无人机飞行轨迹关键控制点进行基因编码,并进行基因杂交、变异等以优化种群与个体;最终通过最小化代价函数,分别筛选出3种典型飞行模式下的最优飞行航迹。仿真和实测数据的三维成像结果表明:相较于传统等间距多基线飞行模式,所提方法显著抑制了成像目标的栅瓣效应;此外,无人机斜线飞行的航迹长度明显缩短,提高了无人机载穿墙SAR成像效率。Abstract: Due to height limitations, the traditional handheld or vehicle-mounted Through-the-Wall Radar (TWR) cannot provide the perspective imaging of internal targets in urban high-rise buildings. Unmanned Aerial Vehicle-TWR (UAV-TWR) offers flexibility, efficiency, convenience, and no height limitations, allowing for large-scale three-Dimensional (3D) penetration detection of urban high-rise buildings. While the multibaseline scanning mode is widely used in 3D tomographic Synthetic Aperture Radar (SAR) imaging to provide resolution in the altitude direction, it often suffers from the grating lobe problem owing to under-sampling in the altitude spatial domain. Therefore, this paper proposes a trajectory planning algorithm for UAV-through-the-wall 3D SAR imaging based on a genetic algorithm to address this issue. By nonuniformizing flight trajectories, the periodic radar echo energy superposition is weakened, thereby suppressing grating lobes to achieve better imaging quality. The proposed algorithm combines the inherent relationship between the flight distance and TWR imaging quality and establishes a cost function for UAV-TWR trajectory planning. We use the genetic algorithm to encode genes for three typical flight trajectory control points and optimize the population and individuals through gene hybridization and mutation. The optimal flight trajectory for each of the three flight modes is selected by minimizing the cost function. Compared with the traditional equidistant multibaseline flight mode, the imaging results from simulations and measured data show that the proposed algorithm significantly suppresses the grating lobe effect of targets. In addition, oblique UAV flight trajectories are significantly shortened, improving the efficiency of through-the-wall SAR imaging.
-

图 1 无人机载穿墙雷达高层建筑探测场景示意图
Figure 1. Schematic diagram of detection scenario for UAV-TWR in high-rise buildings

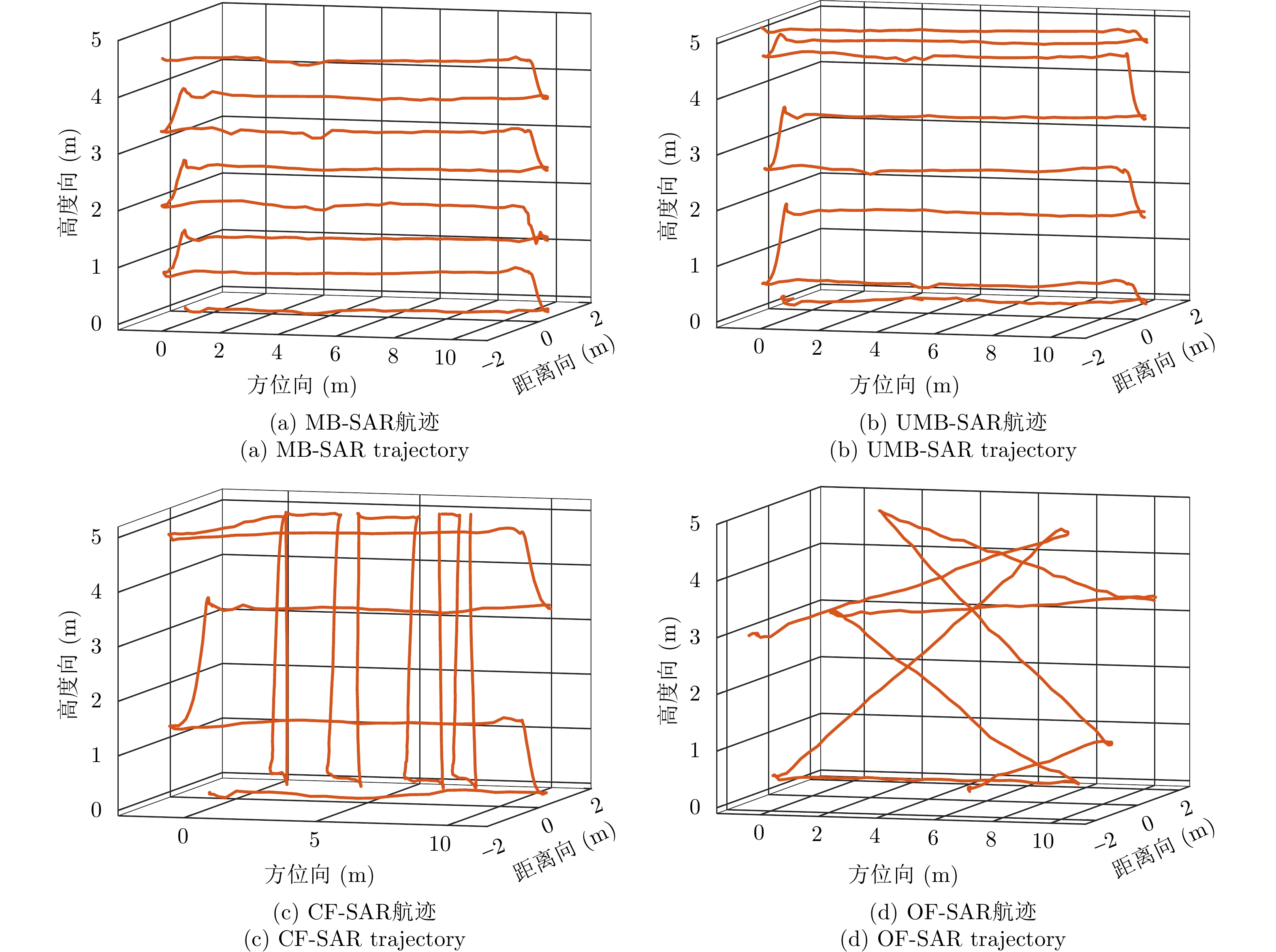
图 14 实测穿墙场景下不同模式的无人机飞行航迹
Figure 14. Actual measurement of UAV flight trajectory in different modes in through-the-wall scenarios

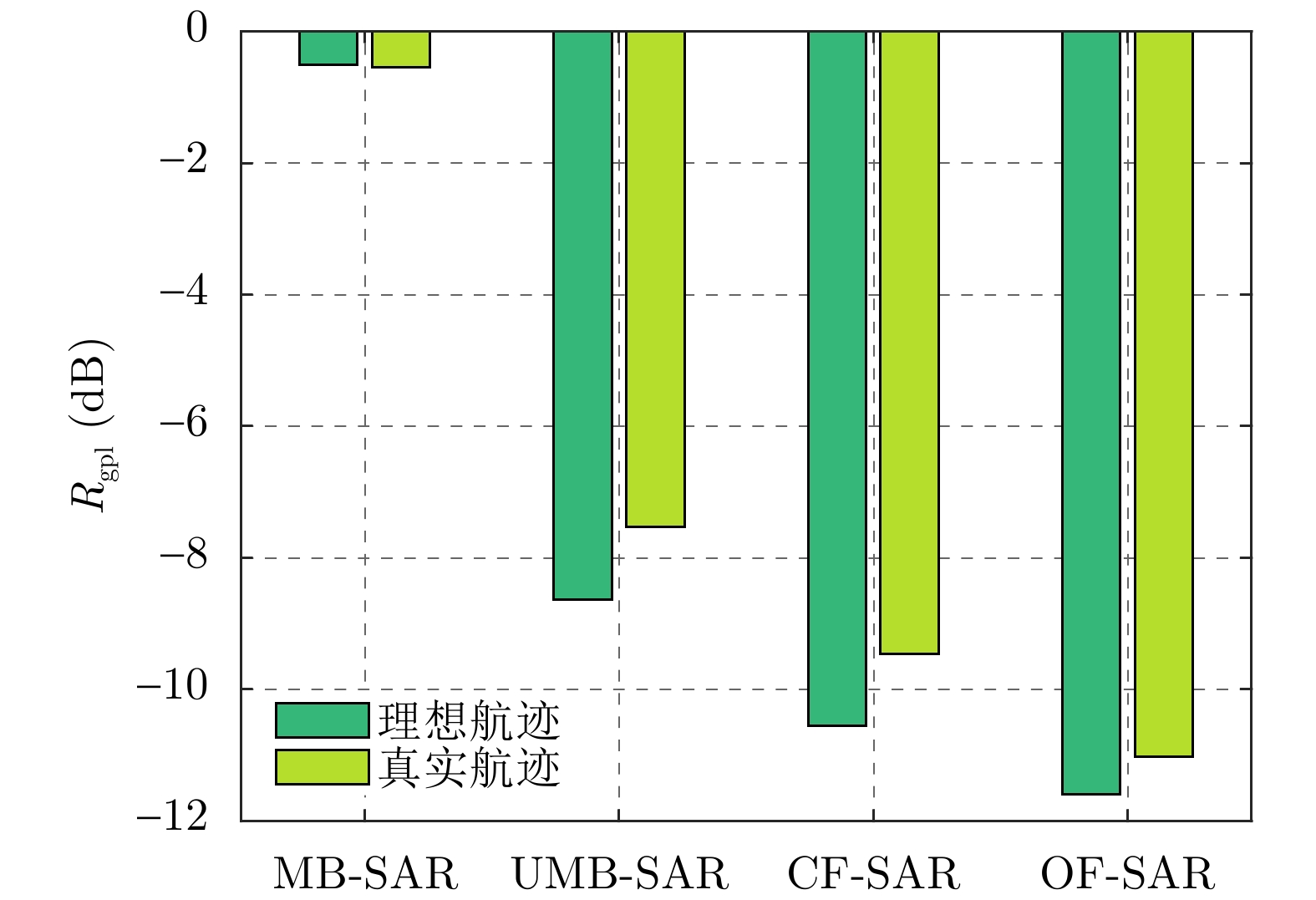
图 15 理想与实测航迹$ {R_{\rm{pgl}}} $仿真对比
Figure 15. Comparison of $ {R_{\rm{pgl}}} $ between ideal and real trajectory in simulation

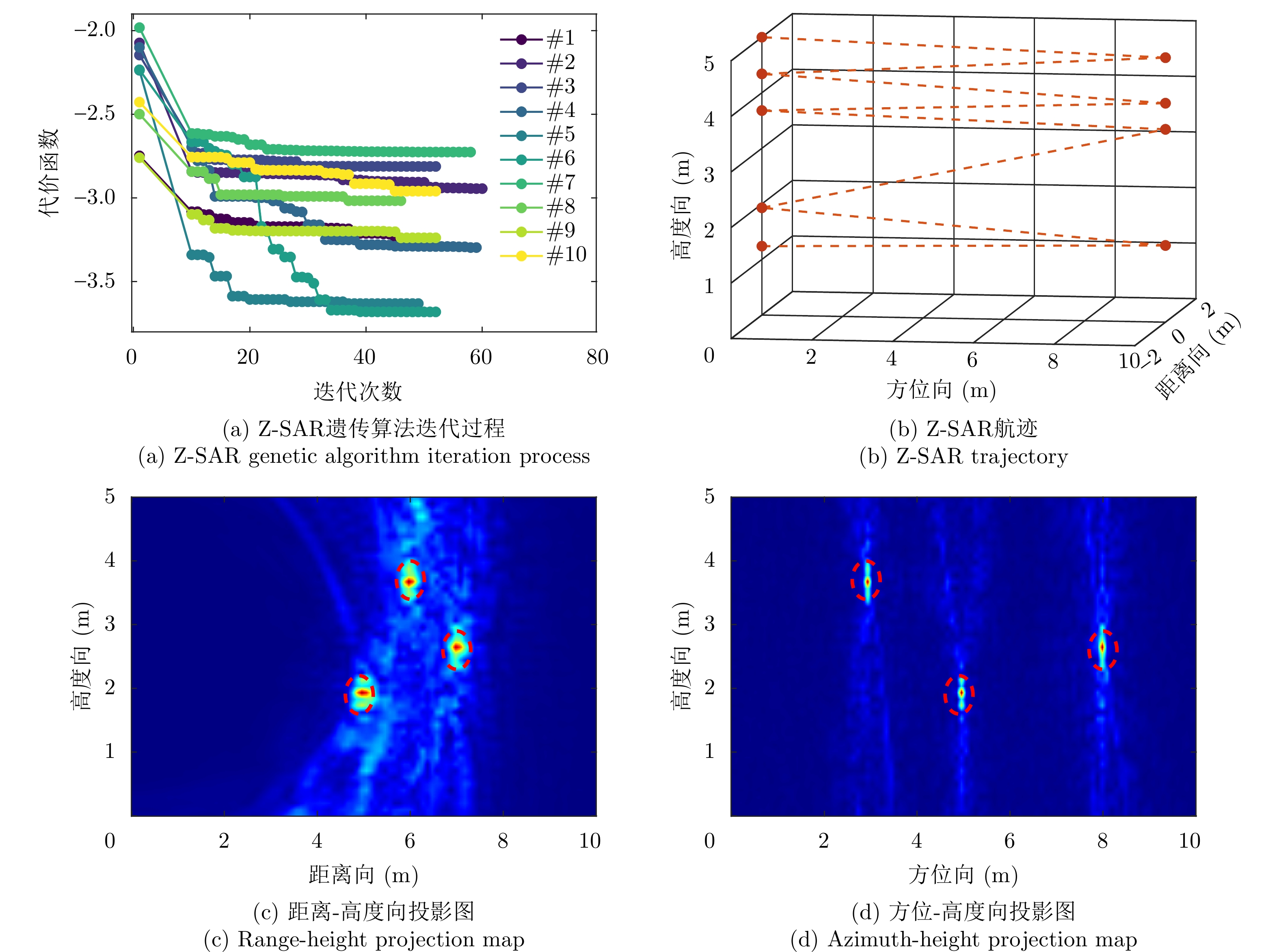
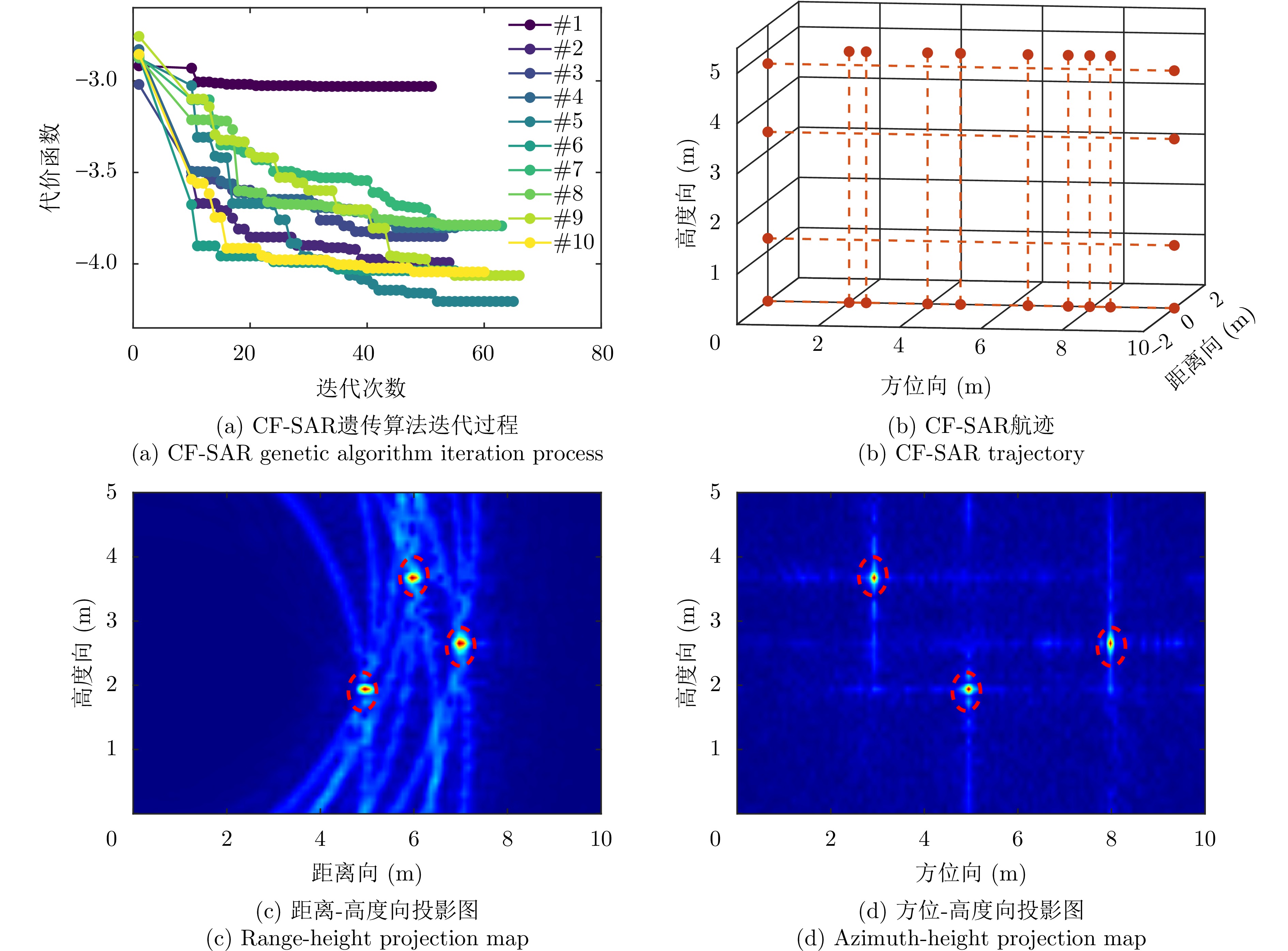
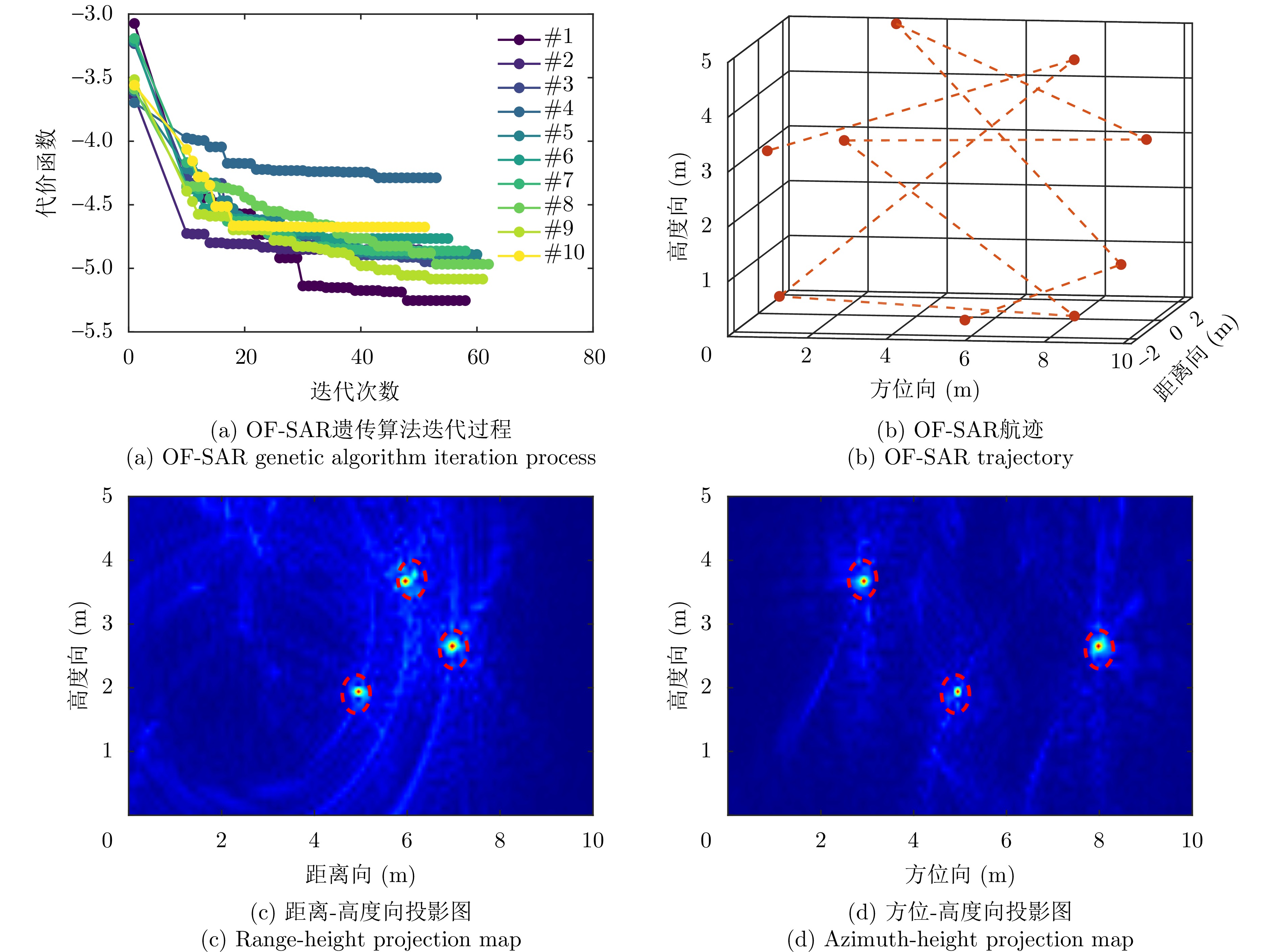
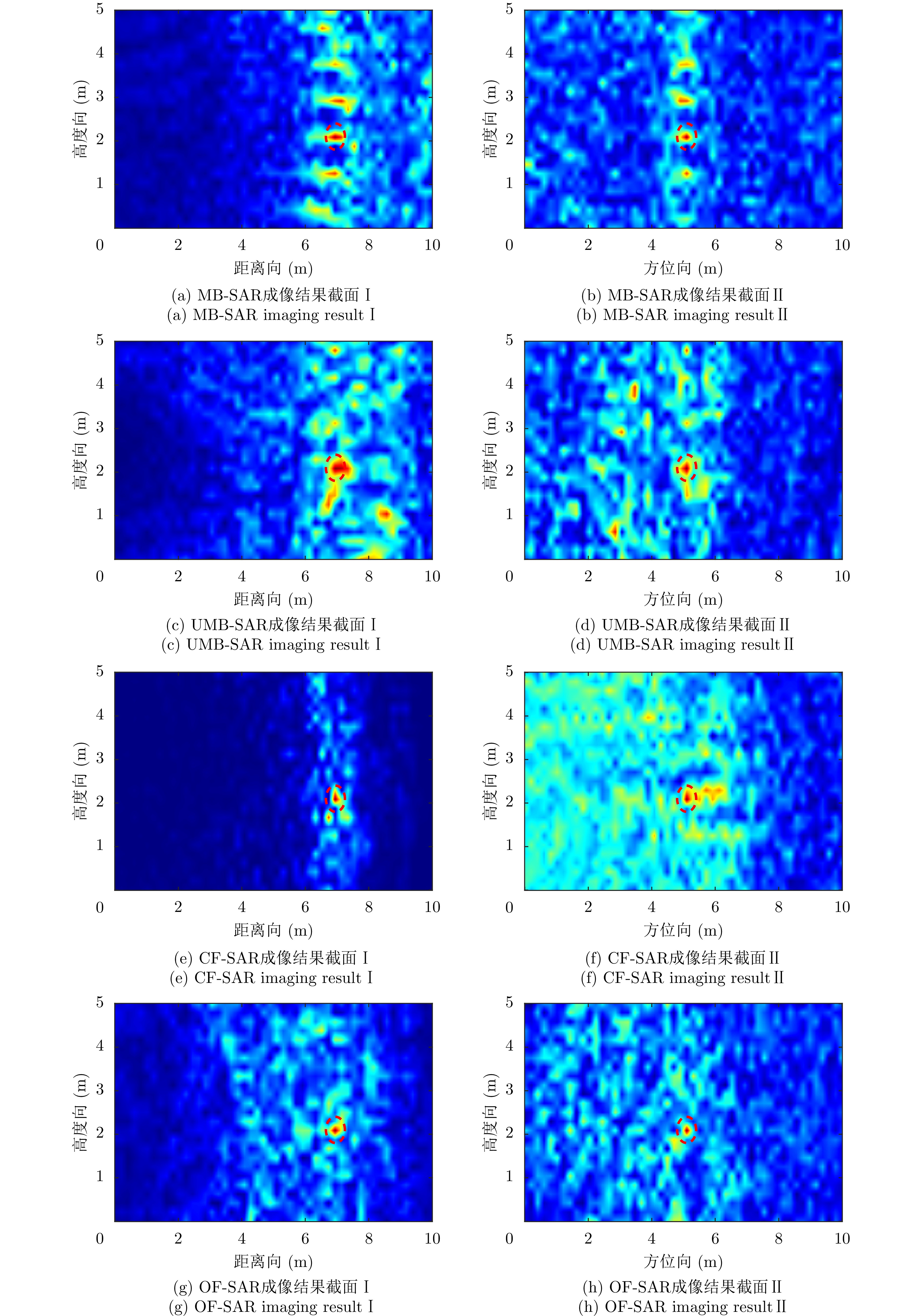
图 16 穿墙场景下4种模式的成像情况(“Ⅰ”表示距离-高度向截面,“Ⅱ”表示方位-高度向截面)
Figure 16. Imaging situation of four modes in through-the-wall scenario (“Ⅰ” represents the range-height section, “Ⅱ” represents the azimuth-height section)
表 1 穿墙场景数值仿真参数
Table 1. Simulation parameter settings
参数 数值 雷达载频 2.95 GHz 雷达带宽 440 MHz 场景方位向范围 0~10 m 场景高度向范围 0~5 m 场景距离向范围 0~10 m 墙体厚度 0.2 m 墙体相对介电常数 4.0 点目标1坐标 (8.0 m, 7.0 m, 2.7 m) 点目标2坐标 (5.0 m, 5.0 m, 2.0 m) 点目标3坐标 (2.0 m, 6.0 m, 3.7 m) 超参数权重$ ({w_1},{w_2},{w_3}) $ (0.02, 0.43, 0.55)  下载: 导出CSV
下载: 导出CSV
表 2 算法仿真结果对比
Table 2. Comparison of algorithm simulation results
飞行模式 代价函数 $ {R_{\rm{pgl}}} $(dB) MB-SAR \ −0.51 UMB-SAR −3.15 −8.64 Z-SAR −3.68 −9.73 CF-SAR −4.21 −10.56 OF-SAR −5.25 −11.60
下载: 导出CSV
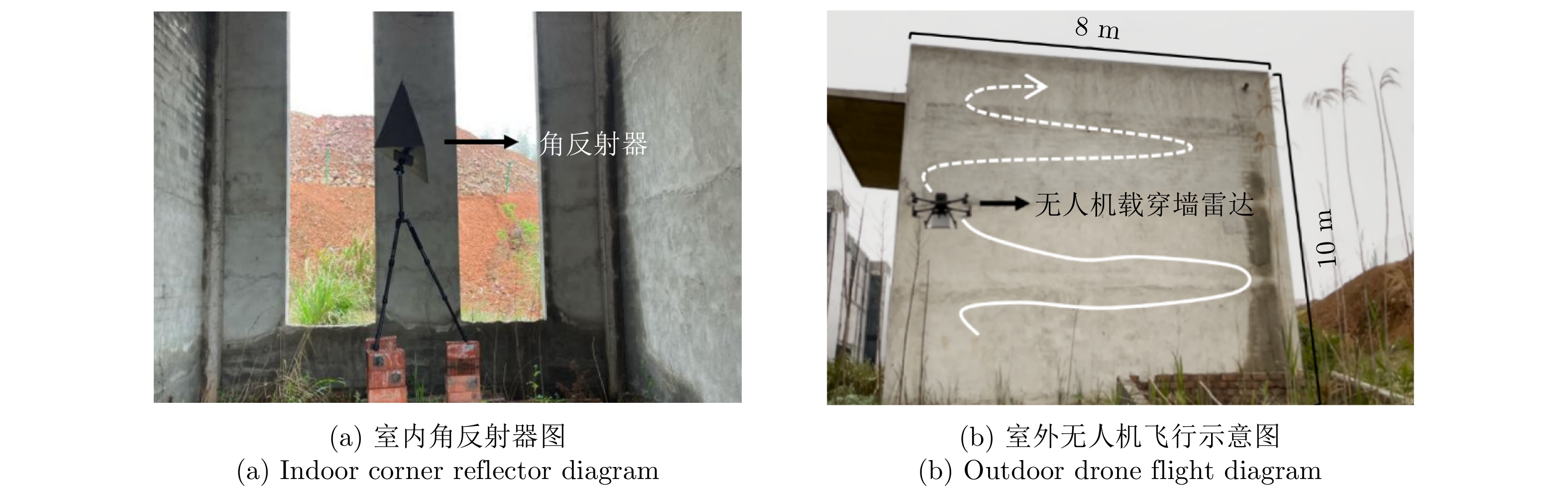
表 3 实测数据参数
Table 3. Actual measured data parameters
实验参数 数值 雷达载频 2.95 GHz 脉冲重复频率 1923 Hz 雷达带宽 440 MHz 采样率 10 MHz 飞行速度 2 m/s
下载: 导出CSV
表 4 算法实测结果对比(dB)
Table 4. Comparison of algorithm measured results (dB)
算法 $ {R_{\rm{pgl}}} $ MB-SAR −1.91 UMB-SAR −4.14 CF-SAR −7.71 OF-SAR −9.52
下载: 导出CSV
-
[1] GAO Weicheng, YANG Xiaopeng, QU Xiaodong, et al. TWR-MCAE: A data augmentation method for through-the-wall radar human motion recognition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5118617. doi: 10.1109/TGRS.2022.3213748. [2] YANG Xiaopeng, GAO Weicheng, QU Xiaodong, et al. A lightweight multiscale neural network for indoor human activity recognition based on macro and micro-Doppler features[J]. IEEE Internet of Things Journal, 2023, 10(24): 21836–21854. doi: 10.1109/JIOT.2023.3301519. [3] 金添, 宋勇平, 崔国龙, 等. 低频电磁波建筑物内部结构透视技术研究进展[J]. 雷达学报, 2021, 10(3): 342–359. doi: 10.12000/JR20119.JIN Tian, SONG Yongping, CUI Guolong, et al. Advances on penetrating imaging of building layout technique using low frequency radio waves[J]. Journal of Radars, 2021, 10(3): 342–359. doi: 10.12000/JR20119. [4] UNAL M, CALISKAN A, TURK A S, et al. Subsurface and through-wall SAR imaging techniques for ground penetrating radar[J]. Технология и Конструирование в Электронной Аппаратуре, 2013(6): 32–36. doi: 10.15222/tkea2013.6.32. [5] WANG Yazhou and FATHY A E. Advanced system level simulation platform for three-dimensional UWB through-wall imaging SAR using time-domain approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(5): 1986–2000. doi: 10.1109/tgrs.2011.2170694. [6] SÉVIGNY P. Joint through-wall 3-D radar imaging and motion detection using a stop-and-go SAR trajectory[C]. 2016 IEEE Radar Conference, Philadelphia, USA, 2016: 1–5. doi: 10.1109/RADAR.2016.7485325. [7] LIU Jiangang, JIA Yong, KONG Lingjiang, et al. MIMO through-wall radar 3-D imaging of a human body in different postures[J]. Journal of Electromagnetic Waves and Applications, 2016, 30(7): 849–859. doi: 10.1080/09205071.2016.1159996. [8] KONG Lingjiang, CUI Guolong, YANG Xiaobo, et al. Three-dimensional human imaging for through-the-wall radar[C]. 2009 IEEE Radar Conference, Pasadena, USA, 2009: 1–4. doi: 10.1109/RADAR.2009.4976932. [9] ZHAO Yikun, YANG Wenfu, LI Yinchuan, et al. Multi-path suppression algorithm for through-the-wall imaging[J]. The Journal of Engineering, 2019, 2019(19): 5629–5633. doi: 10.1049/joe.2019.0126. [10] FREY O and MEIER E. 3-D time-domain SAR imaging of a forest using airborne multibaseline data at L- and P-bands[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3660–3664. doi: 10.1109/tgrs.2011.2128875. [11] DOGARU T, PHELAN B, and LIAO Dahan. Imaging of buried targets using UAV-based, ground penetrating, synthetic aperture radar[C]. SPIE 11003, Radar Sensor Technology XXIII, Baltimore, USA, 2019. doi: 10.1117/12.2519116. [12] ANDRE D, FAULKNER B, and FINNIS M. Low-frequency 3D synthetic aperture radar for the remote intelligence of building interiors[J]. Electronics Letters, 2017, 53(15): 984–987. doi: 10.1049/el.2017.1584. [13] 廖明生, 魏恋欢, 汪紫芸, 等. 压缩感知在城区高分辨率SAR层析成像中的应用[J]. 雷达学报, 2015, 4(2): 123–129. doi: 10.12000/JR15031.LIAO Mingsheng, WEI Lianhuan, WANG Ziyun, et al. Compressive sensing in high-resolution 3D SAR tomography of urban scenarios[J]. Journal of Radars, 2015, 4(2): 123–129. doi: 10.12000/JR15031. [14] ALISTARH C A, PODILCHAK S K, RE P D H, et al. Sectorized FMCW MIMO radar by modular design with non-uniform sparse arrays[J]. IEEE Journal of Microwaves, 2022, 2(3): 442–460. doi: 10.1109/jmw.2022.3165401. [15] FENG Chen, YE Haojian, HONG Hong, et al. A hybrid algorithm for sparse antenna array optimization of MIMO radar[C]. 2022 IEEE Radio and Wireless Symposium, Las Vegas, USA, 2022: 115–117. doi: 10.1109/RWS53089.2022.9719968. [16] HARTMANN F and OSTERMANN J. Investigation of the effect of the flight path on the three dimensional locatability of targets[C]. 2021 7th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Bali, Indonesia, 2021: 1–6. doi: 10.1109/APSAR52370.2021.9688372. [17] BROWN A and ANDERSON D. Trajectory optimization for high-altitude long-endurance UAV maritime radar surveillance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(3): 2406–2421. doi: 10.1109/taes.2019.2949384. [18] DROZDOWICZ J and SAMCZYNSKI P. Drone-based 3D synthetic aperture radar imaging with trajectory optimization[J]. Sensors, 2022, 22(18): 6990. doi: 10.3390/s22186990. [19] SAEEDI J and FAEZ K. A back-projection autofocus algorithm based on flight trajectory optimization for synthetic aperture radar imaging[J]. Multidimensional Systems and Signal Processing, 2016, 27(2): 411–431. doi: 10.1007/s11045-014-0308-1. [20] JIAO Bowen, WANG Zuyi, and XU Li. Control strategy and flight trajectory optimization strategy based on improved De Casteljau’s algorithm for indoor drone[C]. 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 2021: 4633–4638. doi: 10.1109/CCDC52312.2021.9602413. [21] LAHMERI M A, GHANEM W, KNILL C, et al. Trajectory and resource optimization for UAV synthetic aperture radar[C]. 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 2022: 897–903. doi: 10.1109/GCWkshps56602.2022.10008658. [22] TASHTARIAN G and MAJEDI M S. Grating lobes reduction in linear arrays composed of subarrays using PSO[C]. 2019 International Symposium on Networks, Computers and Communications (ISNCC), Istanbul, Turkey, 2019: 1–6. doi: 10.1109/ISNCC.2019.8909108. [23] INDU N, SINGH R P, CHOUDHARY H R, et al. Trajectory design for UAV-to-ground communication with energy optimization using genetic algorithm for agriculture application[J]. IEEE Sensors Journal, 2021, 21(16): 17548–17555. doi: 10.1109/jsen.2020.3046463. [24] 王楚涵, 李小龙, 望明星, 等. 一种机载分布式MIMO雷达节点位置与路径分步优化管控方法[J]. 信号处理, 2024, 40(7): 1249–1265. doi: 10.16798/j.issn.1003-0530.2024.07.007.WANG Chuhan, LI Xiaolong, WANG Mingxing, et al. A stepwise optimization and control method for node location and path of airborne distributed MIMO radar[J]. Journal of Signal Processing, 2024, 40(7): 1249–1265. doi: 10.16798/j.issn.1003-0530.2024.07.007. [25] WANG Xiaofeng, RUAN Yaduan, and ZHANG Xinggan. Accuracy improvement of high-resolution wide-swath spaceborne synthetic aperture radar imaging with low pule repetition frequency[J]. Remote Sensing, 2023, 15(15): 3811. doi: 10.3390/rs15153811. [26] WARREN C, GIANNOPOULOS A, GRAY A, et al. A CUDA-based GPU engine for gprMax: Open source FDTD electromagnetic simulation software[J]. Computer Physics Communications, 2019, 237: 208–218. doi: 10.1016/j.cpc.2018.11.007. -










计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

