
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Precise Reconstruction Method for Hidden Targets Based on Non-line-of-sight Radar 3D Imaging
-
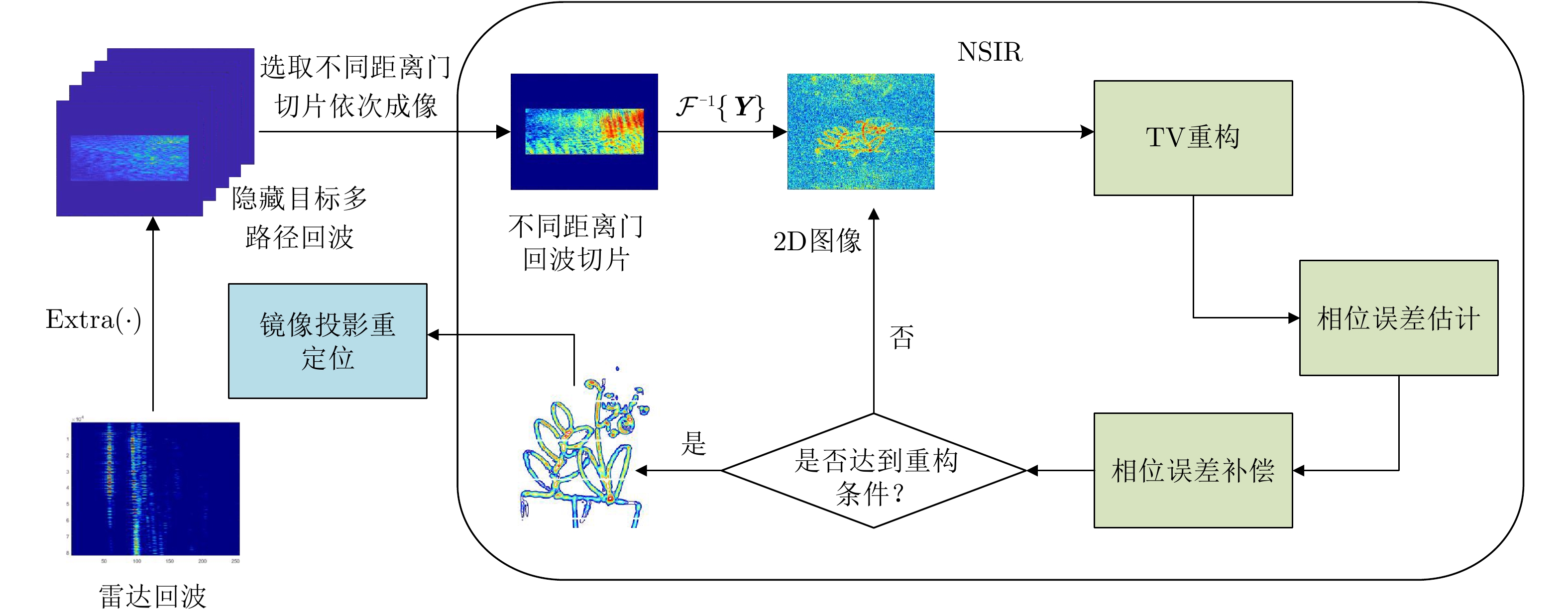
摘要: 非视距(NLOS)三维成像雷达是一种利用多径散射回波探测隐藏目标的新技术,但存在多路径回波分离、孔径遮蔽缩减、反射面相位误差等问题,传统视距雷达三维成像方法难以实现非视距隐藏目标的高精度成像。为此,该文提出了一种基于迭代稀疏重构的非视距隐藏目标三维成像雷达精确成像方法(NSIR)。在该方法中,首先构建非视距毫米波雷达三维成像的多径信号模型,利用视距/非视距回波特性,通过模型驱动方法提取非视距隐藏目标的多路径回波,实现视距/非视距回波信号的分离;其次,构建耦合多径反射面相位误差的全变分多约束隐藏目标重构优化问题,利用分裂Bregman全变分(TV)正则化算子和最小均方误差的相位误差估计准则,联合求解多约束最优化问题,实现非视距目标的精确成像及轮廓重构。最后,搭建平面扫描的三维成像雷达试验平台,完成了拐角非视距场景下刀具、铁架等目标的实验验证,验证了非视距毫米波三维成像雷达隐匿目标探测能力及该文方法的有效性。Abstract: Non-Line-Of-Sight (NLOS) 3D imaging radar is an emerging technology that utilizes multipath scattering echoes to detect hidden targets. However, this technology faces challenges such as the separation of multipath echoes, reduction of aperture occlusion, and phase errors of reflective surfaces, which hinder the high-precision imaging of hidden targets when using traditional Line-Of-Sight (LOS) radar imaging methods. To address these challenges, this paper proposes a precise imaging method for NLOS hidden targets based on Sparse Iterative Reconstruction (NSIR). In this method, we first establish a multipath signal model for NLOS millimeter-wave 3D imaging radar. By exploiting the characteristics of LOS/NLOS echoes, we extract the multipath echoes from hidden targets using a model-driven approach to realize the separation of LOS/NLOS echo signals. Second, we formulate a total variation multiconstraint optimization problem for reconstructing hidden targets, integrating multipath reflective surface phase errors. Using the split Bregman Total Variation (TV) regularization operator and the phase error estimation criterion based on the minimum mean square error, we jointly solve the multiconstraint optimization problem. This approach facilitates precise imaging and contour reconstruction of NLOS targets. Finally, we construct a planar scanning 3D imaging radar experimental platform and conduct experimental verification of targets such as knives and iron racks in a corner NLOS scenario. Results validate the capability of NLOS millimeter-wave 3D imaging radar in detecting hidden targets and the effectiveness of the method proposed in this paper.
-
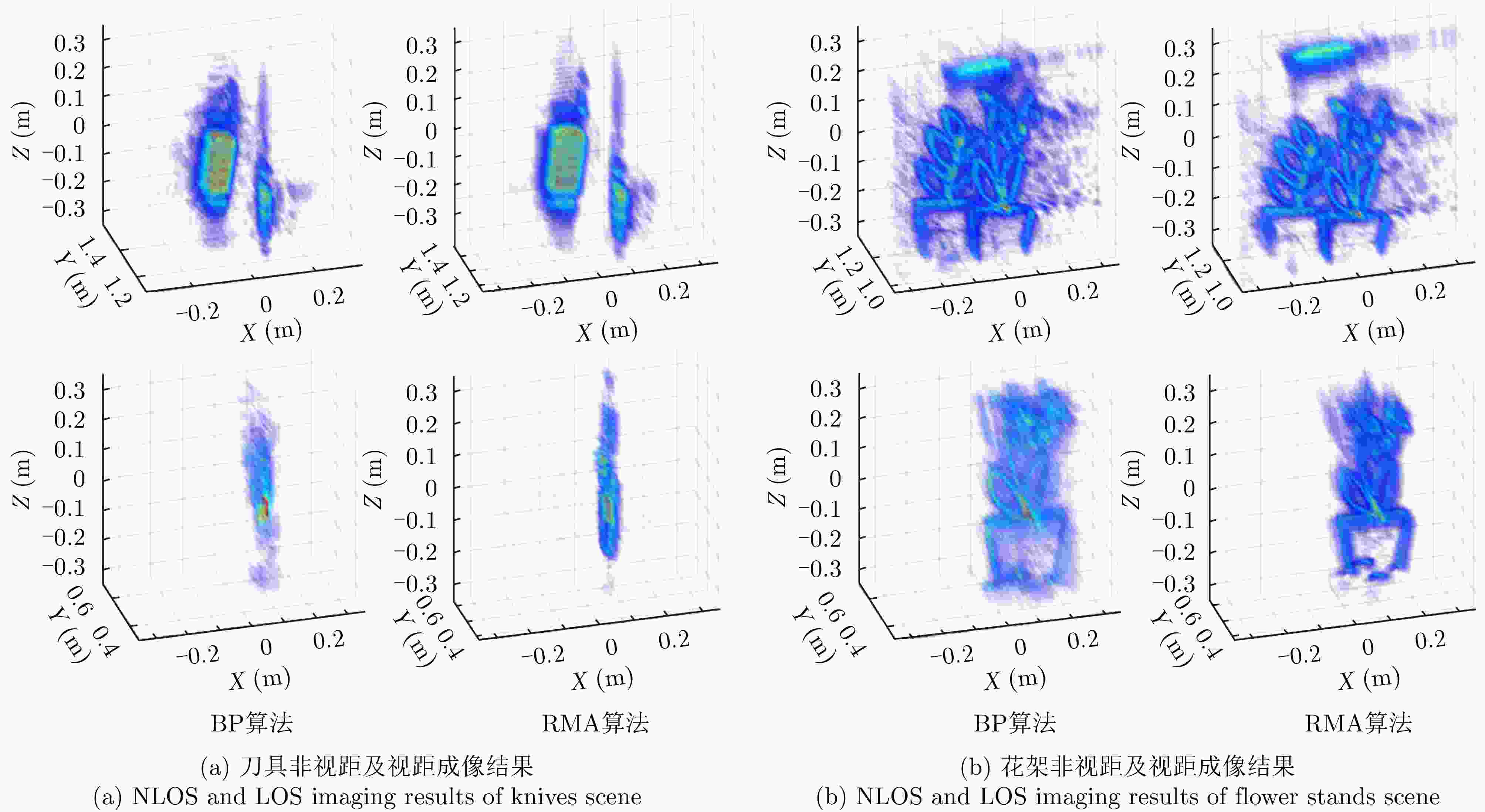
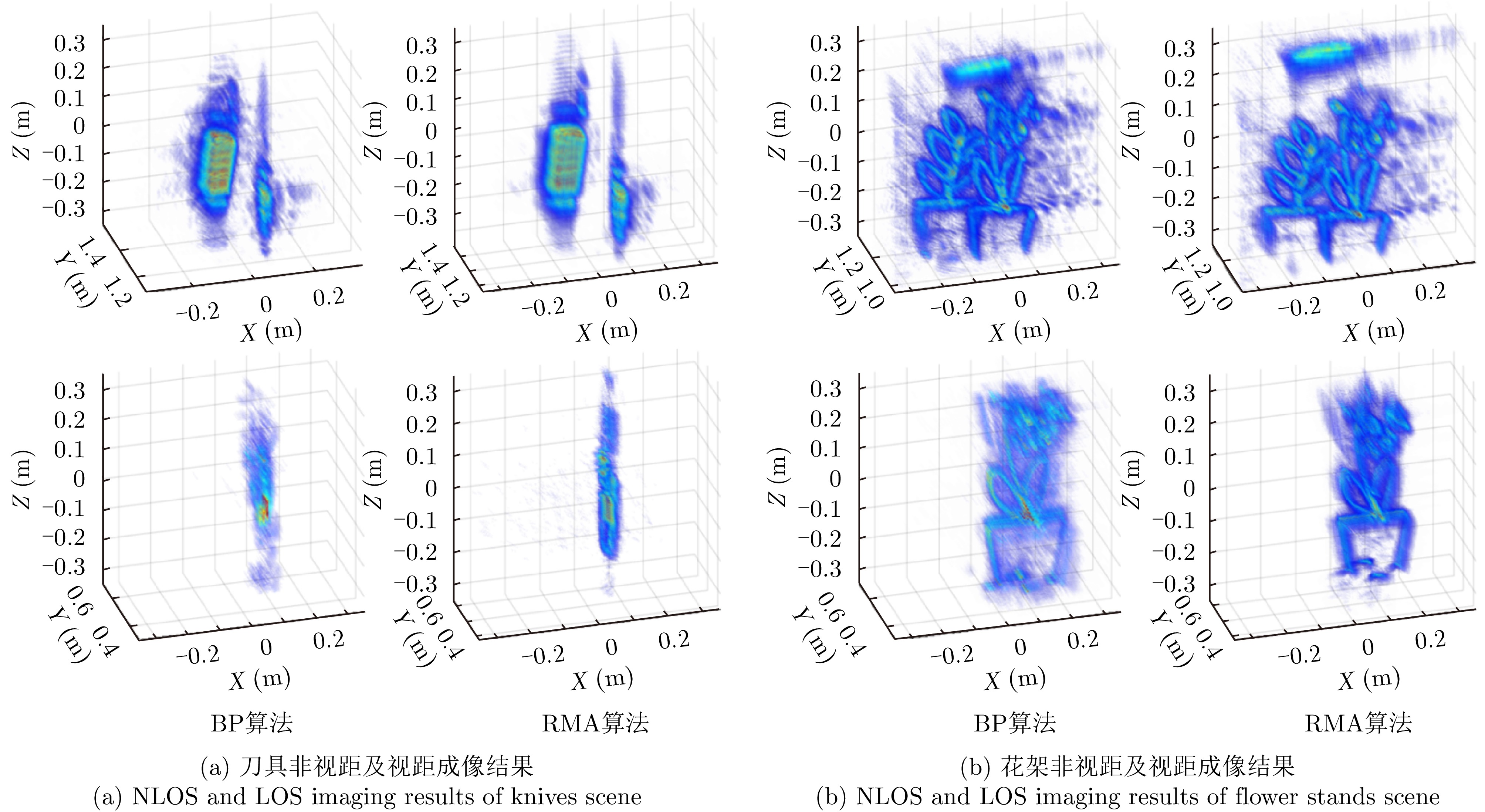
图 7 金属刀具及金属花架非视距及视距成像结果对比(第1行为非视距成像结果,第2行为视距成像结果,采样率均为100%)
Figure 7. Comparison of the NLOS and LOS imaging results of the metal knives and the metal flower stands (the first line is the NLOS imaging result, the second line is the LOS imaging result, the sampling rate is 100%)
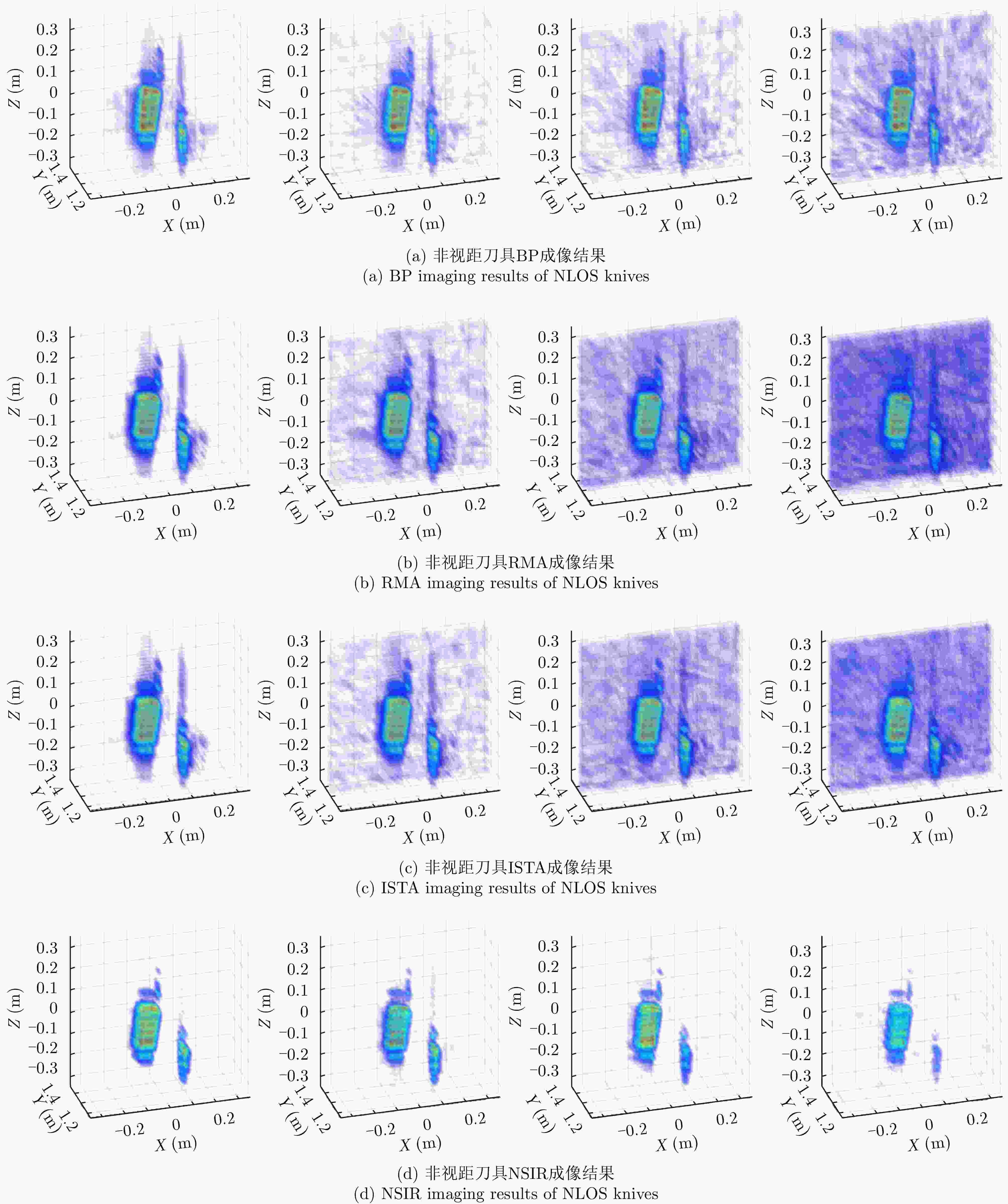
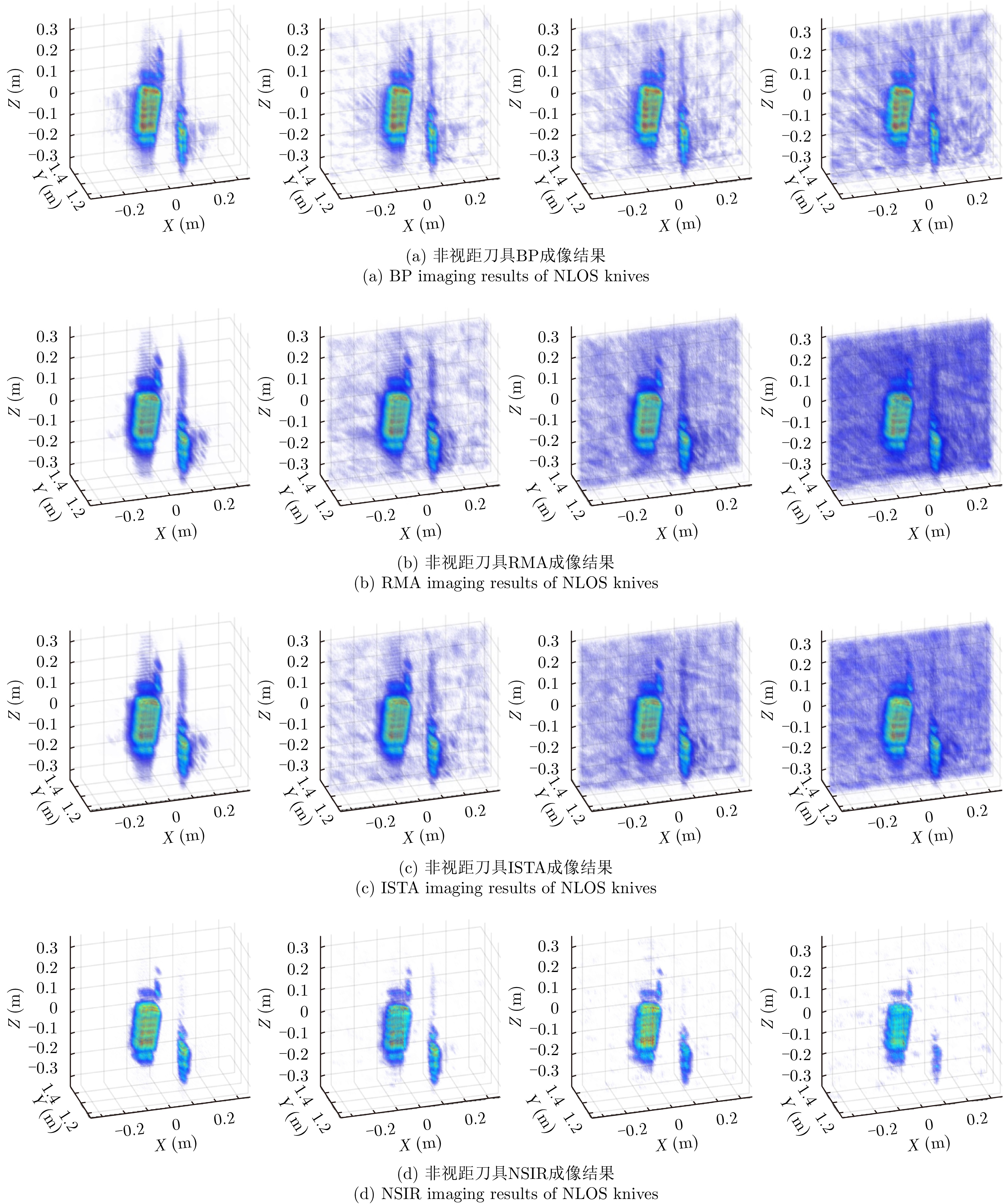
图 8 不同采样率下,4种算法的非视距金属刀具成像结果对比(从左至右:采样率分别为100%, 70%, 50%和30%)
Figure 8. Comparison of NLOS metal knives imaging results of four algorithms with different sampling rates (from left to right: sampling rates of 100%, 70%, 50%, and 30%, respectively)

图 9 不同采样率下,4种算法的非视距金属花架成像结果对比((从左至右:采样率分别为100%, 70%, 50%和30%)
Figure 9. Comparison of NLOS metal flower stands imaging results of four algorithms with different sampling rates (from left to right: sampling rates of 100%, 70%, 50%, and 30%, respectively)
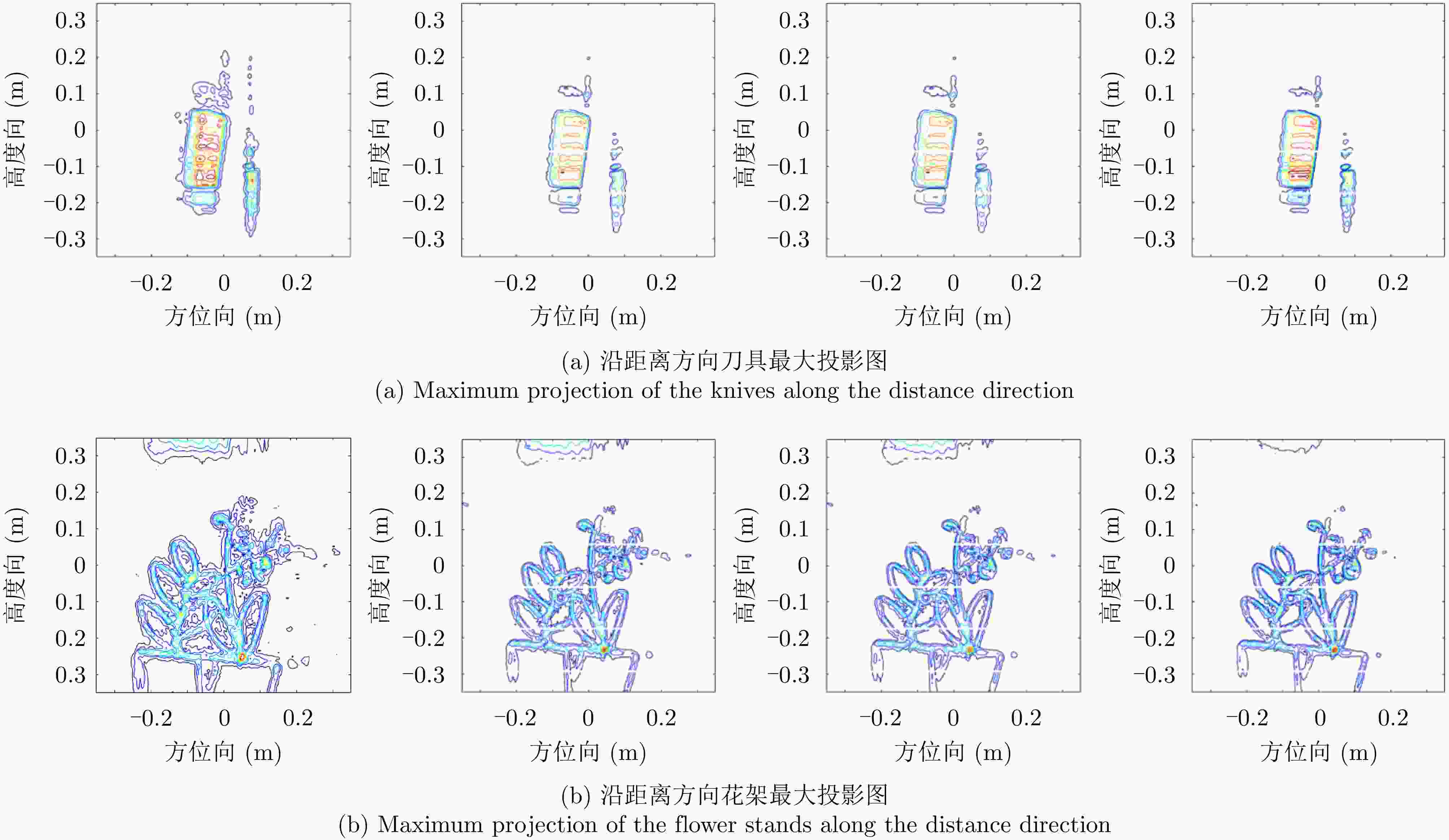
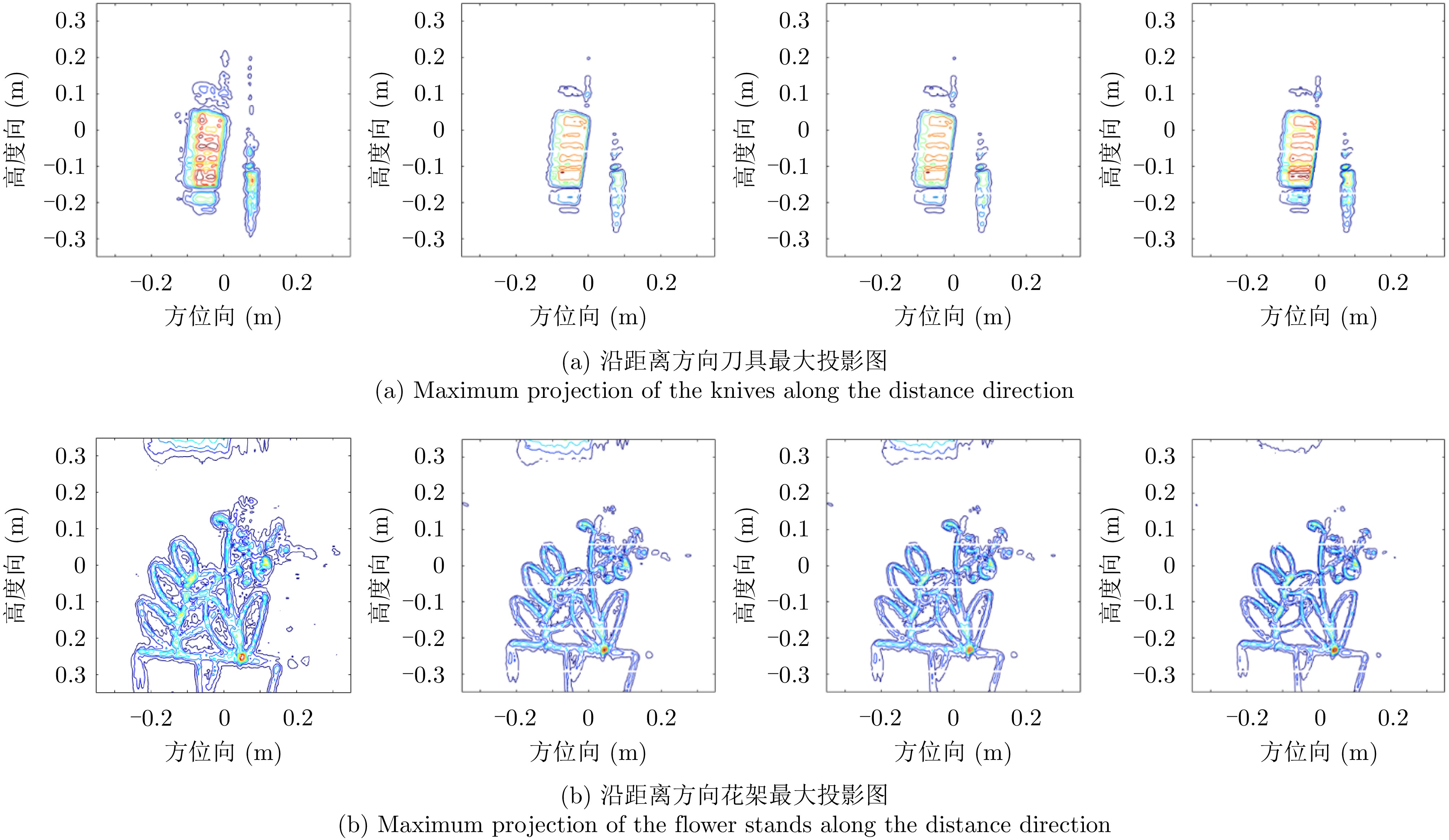
图 10 在全采样率下,4种算法的最大投影结果对比(从左往右分别对应BP, RMA, ISTA和NSIR)
Figure 10. At the full sampling rate, the maximum projection results of the four algorithms are compared (from left to right, corresponding to BP, RMA, ISTA and NSIR)
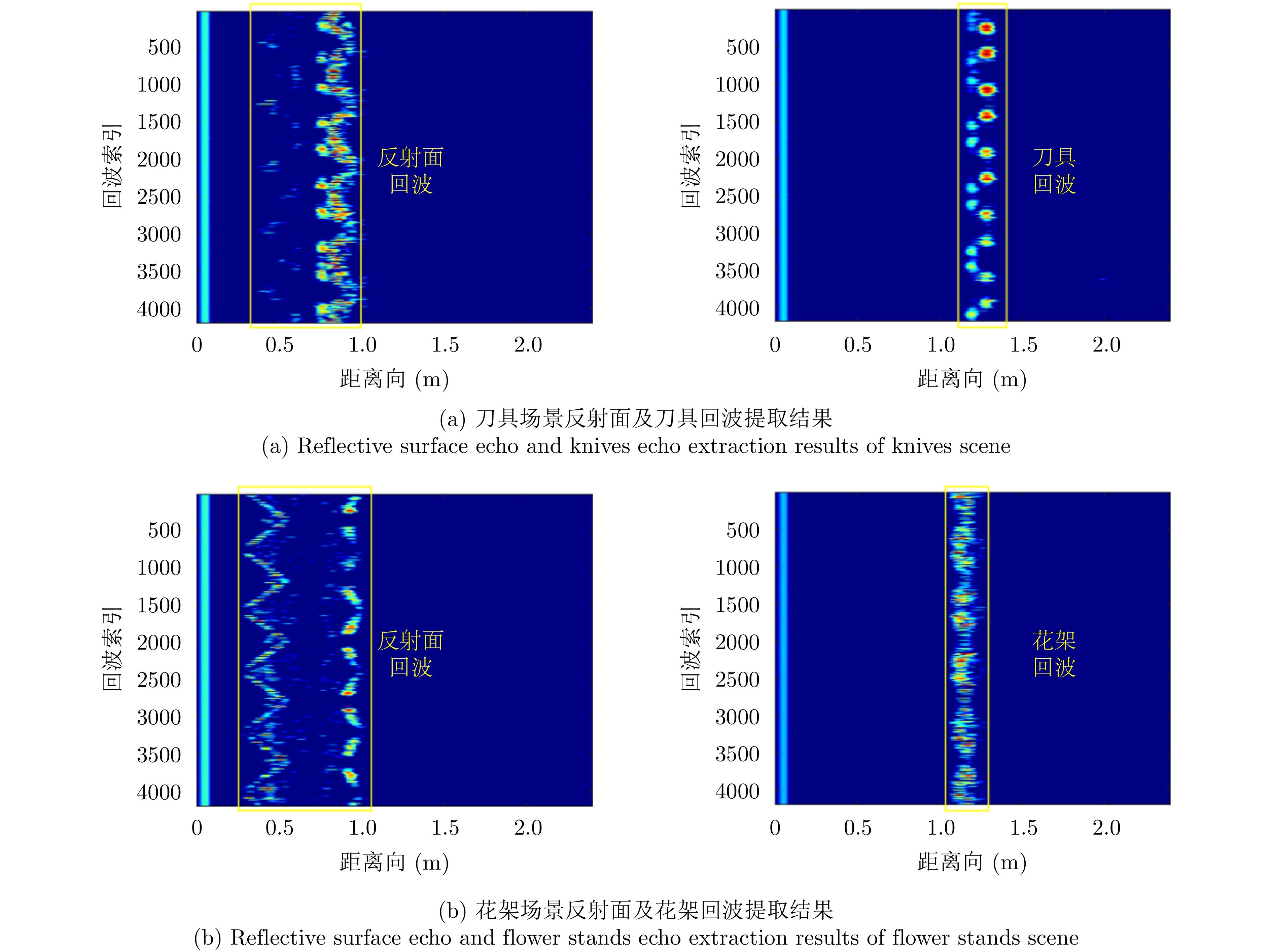
1 NLOS目标多路径回波提取
1. Extraction of NLOS target echoes
输入:LOS环境结构,雷达回波E; 输出:NLOS目标多径回波; RMA粗成像:${{\boldsymbol{I}}_{{\text{RMA}}}} = {\mathcal{G}_{{\text{RMA}}}}\left( {\boldsymbol{E}} \right)$; 结合RMA成像结果与LOS环境布局分析,确定NLOS区域及隐藏
目标:${\varOmega _{{\mathrm{all}}}}\mathop \to \limits^f {\varOmega _{{\mathrm{NLOS}}}}$;距离聚焦:${P_{\text{c}}} = {\text{FFT}}\left( {{\boldsymbol{E}},q} \right)$; 计算隐藏目标对应时延及距离:${y_r} = \left( {\dfrac{{{m_r}}}{{{f_0} \times T \times q}}} \right) \times \dfrac{{\mathrm{c}}}{2}$; 根据镜像对称原理,确定同一目标不同虚像对应的回波; 根据距离历史提取对应回波:${\text{Extra}}\left( {\boldsymbol{E}} \right) \to {{\boldsymbol{E}}_{{\text{NLOS}}}}$; 返回隐藏目标的多径回波。  下载: 导出CSV
下载: 导出CSV
2 三维雷达自聚焦成像算法NSIR
2. 3D radar autofocusing imaging algorithm NSIR
输入:隐藏目标回波${{\boldsymbol{S}}_{\text{e}}} \in {\mathbb{C}^{{N_x} \times {N_z} \times R}}$,参数$\lambda $, ${\gamma _1}$和${\gamma _2}$; 输出:稀疏成像结果$ {\boldsymbol{X}} \in {\mathbb{C}^{R \times N \times N}} $; 初始化:${\boldsymbol{X}}^0 = {\boldsymbol{b}}_1^0 = {\boldsymbol{b}}_2^0 = {\boldsymbol{d}}_1^0 = {\boldsymbol{d}}_2^0 = 0$, ${\boldsymbol{Y}} = {{\boldsymbol{S}}_{\text{e}}}$; 循环开始 (1) 根据式(34),重构${\boldsymbol{X}}^{k + 1}$; (2) 更新辅助变量:$ {\boldsymbol{d}}_1^{k + 1} = \mathcal{T}\left( {\nabla {\boldsymbol{X}}^{k + 1} + {\boldsymbol{b}}_1^k,1/{\gamma _1}} \right) $,
$ {\boldsymbol{d}}_2^{k + 1} = \mathcal{T}\left( {{\boldsymbol{X}}^{k + 1} + {\boldsymbol{b}}_2^k,1/{\gamma _2}} \right) $;(3) 更新参数:$ {\boldsymbol{b}}_1^{k + 1} = {\boldsymbol{b}}_1^k + \nabla {\boldsymbol{X}}^{k + 1} - {\boldsymbol{d}}_1^{k + 1} $,
$ {\boldsymbol{b}}_2^{k + 1} = {\boldsymbol{b}}_2^k + {\boldsymbol{X}}^{k + 1} - {\boldsymbol{d}}_2^{k + 1} $;(4) 由式(32)、式(33)估计相位误差, $t = t + 1$; (5) 迭代判定:若$k \le T$,则重复(1)—(5);否则,结束循环。 循环结束
下载: 导出CSV
表 1 实测系统参数
Table 1. Parameters in real experiments
参数 实测系统值 载频(GHz) 79 带宽(GHz) 3.998 孔径尺寸(cm) 40×40 采样间隔(mm) x: 1; z: 2 脉冲发射间隔(ms) 50
下载: 导出CSV
表 2 不同算法下的实测实验数值评估结果
Table 2. Numerical evaluation results of real experiments with different algorithms
目标 采样率(%) BP RMA ISTA NSIR ENT IC Time (s) ENT IC Time (s) ENT IC Time (s) ENT IC Time (s) 金属刀具 100 11.03 8.74 810.56 10.70 8.41 1.05 10.65 8.48 14.69 10.24 11.05 76.94 70 11.15 8.62 625.30 11.06 7.91 1.06 10.944 8.06 17.58 10.78 11.75 124.38 50 11.27 8.50 308.45 11.39 7.30 1.06 11.237 7.54 17.82 10.00 11.64 77.447 30 11.49 8.12 183.67 11.92 6.19 1.15 11.572 6.79 20.49 9.93 12.08 131.58 金属花架 100 11.25 7.25 251.61 11.93 5.23 0.99 11.61 5.73 23.96 10.71 9.07 80.96 70 11.50 6.82 169.20 12.41 4.56 1.00 11.83 5.44 24.61 10.44 12.08 80.18 50 11.75 5.13 120.88 12.78 3.98 0.98 12.05 5.16 24.48 10.06 16.30 77.25 30 11.10 4.23 73.76 13.23 3.04 0.99 12.26 4.76 24.53 8.59 45.89 77.98
下载: 导出CSV
-
[1] WEI Shunjun, WEI Jinshan, LIU Xinyuan, et al. Nonline-of-sight 3-D imaging using millimeter-wave radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5106518. doi: 10.1109/TGRS.2021.3112579. [2] 孔令讲, 郭世盛, 陈家辉, 等. 多径利用雷达目标探测技术综述与展望[J]. 雷达学报(中英文), 2024, 13(1): 23–45. doi: 10.12000/JR23134.KONG Lingjiang, GUO Shisheng, CHEN Jiahui, et al. Overview and prospects of multipath exploitation radar target detection technology[J]. Journal of Radars, 2024, 13(1): 23–45. doi: 10.12000/JR23134. [3] 杨建宇. 雷达技术发展规律和宏观趋势分析[J]. 雷达学报, 2012, 1(1): 19–27. doi: 10.3724/SP.J.1300.2012.20010.Yang Jianyu. Development laws and macro trends analysis of radar technology[J]. Journal of Radars, 2012, 1(1): 19–27. doi: 10.3724/SP.J.1300.2012.20010. [4] 丁赤飚, 仇晓兰, 吴一戎. 全息合成孔径雷达的概念、体制和方法[J]. 雷达学报, 2020, 9(3): 399–408. doi: 10.12000/JR20063.DING Chibiao, QIU Xiaolan, and WU Yirong. Concept, system, and method of holographic synthetic aperture radar[J]. Journal of Radars, 2020, 9(3): 399–408. doi: 10.12000/JR20063. [5] 丁赤飚, 仇晓兰, 徐丰, 等. 合成孔径雷达三维成像—从层析、阵列到微波视觉[J]. 雷达学报, 2019, 8(6): 693–709. doi: 10.12000/JR19090.DING Chibiao, QIU Xiaolan, XU Feng, et al. Synthetic aperture radar three-dimensional imaging—from TomoSAR and array InSAR to microwave vision[J]. Journal of Radars, 2019, 8(6): 693–709. doi: 10.12000/JR19090. [6] VELTEN A, WILLWACHER T, GUPTA O, et al. Recovering three-dimensional shape around a corner using ultrafast time-of-flight imaging[J]. Nature communications, 2012, 3(1): 745. doi: 10.1038/ncomms1747. [7] KATZ O, HEIDMANN P, FINK M, et al. Non-invasive single-shot imaging through scattering layers and around corners via speckle correlations[J]. Nature photonics, 2014, 8(10): 784–790. doi: 10.1038/nphoton.2014.189. [8] YEDIDIA A B, BARADAD M, THRAMPOULIDIS C, et al. Using unknown occluders to recover hidden scenes[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 12223–12231. doi: 10.1109/CVPR.2019.01251. [9] KIRMANI A, HUTCHISON T, DAVIS J, et al. Looking around the corner using transient imaging[C]. 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 2009: 159–166. doi: 10.1109/ICCV.2009.5459160. [10] LIU Xintong, WANG Jianyu, LI Zhupeng, et al. Non-line-of-sight reconstruction with signal-object collaborative regularization[J]. Light: Science & Applications, 2021, 10(1): 198. doi: 10.1038/s41377-021-00633-3. [11] LINDELL D B, WETZSTEIN G, and KOLTUN V. Acoustic non-line-of-sight imaging[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 6773–6782. doi: 10.1109/CVPR.2019.00694. [12] ADIB F and KATABI D. See through walls with WiFi![C]. ACM SIGCOMM 2013 conference on SIGCOMM, Hong Kong, China, 2013: 75–86. doi: 10.1145/2486001.2486039. [13] PAULI M, GÖTTEL B, SCHERR S, et al. Miniaturized millimeter-wave radar sensor for high-accuracy applications[J]. IEEE Transactions on Microwave Theory and Techniques, 2017, 65(5): 1707–1715. doi: 10.1109/TMTT.2017.2677910. [14] WANG Xiao, XU Linhai, SUN Hongbin, et al. On-road vehicle detection and tracking using MMW radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2075–2084. doi: 10.1109/TITS.2016.2533542. [15] LEIGSNERING M, AHMAD F, AMIN M, et al. Multipath exploitation in through-the-wall radar imaging using sparse reconstruction[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 920–939. doi: 10.1109/TAES.2013.120528. [16] SUME A, GUSTAFSSON M, HERBERTHSON M, et al. Radar detection of moving targets behind corners[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6): 2259–2267. doi: 10.1109/TGRS.2010.2096471. [17] ZETIK R, ESCHRICH M, JOVANOSKA S, et al. Looking behind a corner using multipath-exploiting UWB radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1916–1926. doi: 10.1109/TAES.2015.140303. [18] YANG Xiaqing, FAN Shihao, GUO Shisheng, et al. NLOS target localization behind an L-shaped corner with an L-band UWB radar[J]. IEEE Access, 2020, 8: 31270–31286. doi: 10.1109/ACCESS.2020.2973046. [19] LI Songlin, GUO Shisheng, CHEN Jiahui, et al. Multiple targets localization behind L-shaped corner via UWB radar[J]. IEEE Transactions on Vehicular Technology, 2021, 70(4): 3087–3100. doi: 10.1109/TVT.2021.3068266. [20] KAMANN A, HELD P, PERRAS F, et al. Automotive radar multipath propagation in uncertain environments[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, USA, 2018: 859–864. doi: 10.1109/ITSC.2018.8570016. [21] CAI Xiang, WEI Shunjun, WEN Yanbo, et al. Bayesian-Based 3-D MMW radar imaging of non-line-of-sight environments[C]. 2023 Cross Strait Radio Science and Wireless Technology Conference (CSRSWTC), Guilin, China, 2023: 1–3. doi: 10.1109/CSRSWTC60855.2023.10427181. [22] CAI Xiang, WEI Shunjun, LIU Xinyuan, et al. Compressed sensing imaging of MMW automotive radar via non-line-of-sight observation[C]. 2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, USA, 2023: 1225–1228. doi: 10.1109/IGARSS52108.2023.10282596. [23] WEN Yanbo, WEI Shunjun, WEI Jinshan, et al. Non-line-of-sight imaging of hidden moving target using millimeter-wave inverse synthetic aperture radar[C]. 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 2022: 555–558. doi: 10.1109/IGARSS46834.2022.9883939. [24] LIN Yuqing, LUO Yitong, QIU Xiaolan, et al. Non-line-of-sight target imaging in tomographic SAR by multipath signal analysis[C]. 2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, USA, 2023: 7761–7764. doi: 10.1109/IGARSS52108.2023.10281638. [25] YEGULALP A F. Fast backprojection algorithm for synthetic aperture radar[C]. 1999 IEEE Radar Conference. Radar into the Next Millennium (Cat. No99CH36249), Waltham, USA, 1999: 60–65. doi: 10.1109/NRC.1999.767270. [26] FRANCESCHETTI G and SCHIRINZI G. A SAR processor based on two-dimensional FFT codes[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990, 26(2): 356–366. doi: 10.1109/7.53462. [27] LOPEZ-SANCHEZ J M and FORTUNY-GUASCH J. 3-D radar imaging using range migration techniques[J]. IEEE Transactions on Antennas and Propagation, 2000, 48(5): 728–737. doi: 10.1109/8.855491. [28] BROWN W M. Synthetic aperture radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 1967, AES-3(2): 217–229. doi: 10.1109/TAES.1967.5408745. [29] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306. doi: 10.1109/TIT.2006.871582. [30] FANG Jian, XU Zongben, ZHANG Bingchen, et al. Fast compressed sensing SAR imaging based on approximated observation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(1): 352–363. doi: 10.1109/JSTARS.2013.2263309. [31] WEI Shunjun, ZHANG Xiaoling, SHI Jun, et al. Sparse reconstruction for SAR imaging based on compressed sensing[J]. Progress in Electromagnetics Research, 2010, 109: 63–81. doi: 10.2528/PIER10080805. [32] ÇETIN M, STOJANOVIĆ I, ÖNHON N Ö, et al. Sparsity-driven synthetic aperture radar imaging: Reconstruction, autofocusing, moving targets, and compressed sensing[J]. IEEE Signal Processing Magazine, 2014, 31(4): 27–40. doi: 10.1109/MSP.2014.2312834. [33] BARANIUK R and STEEGHS P. Compressive radar imaging[C]. 2007 IEEE Radar Conference, Waltham, USA, 2007: 128–133. doi: 10.1109/RADAR.2007.374203. [34] XU Gang, XIA Xianggen, and WEI Hong. Nonambiguous SAR image formation of maritime targets using weighted sparse approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(3): 1454–1465. doi: 10.1109/TGRS.2017.2763147. [35] PU Wei, WU Junjie, WANG Xiaodong, et al. Joint sparsity-based imaging and motion error estimation for BFSAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(3): 1393–1408. doi: 10.1109/TGRS.2018.2866437. [36] WEI Shunjun, ZHANG Xiaoling, and SHI Jun. Sparse autofocus via Bayesian learning iterative maximum and applied for LASAR 3-D imaging[C]. 2014 IEEE Radar Conference, Cincinnati, USA, 2014: 0666–0669. doi: 10.1109/RADAR.2014.6875674. [37] STRONG D and CHAN T. Edge-preserving and scale-dependent properties of total variation regularization[J]. Inverse Problems, 2003, 19(6): S165–S187. doi: 10.1088/0266-5611/19/6/059. [38] OSHER S, BURGER M, GOLDFARB D, et al. An iterative regularization method for total variation-based image restoration[J]. Multiscale Modeling & Simulation, 2005, 4(2): 460–489. doi: 10.1137/040605412. [39] WANG Mou, WEI Shunjun, LIANG Jiadian, et al. RMIST-Net: Joint range migration and sparse reconstruction network for 3-D mmW imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5205117. doi: 10.1109/TGRS.2021.3068405. [40] WANG Yingzhou, LI Lijun, and GONG Ke. Narrowband experimental study on millimeter-wave indoor propagation[C]. 1998 International Conference on Communication Technology, Beijing, China, 1998: 5. doi: 10.1109/ICCT.1998.741269. [41] HANSEN P C and O’LEARY D P. The use of the L-curve in the regularization of discrete ill-posed problems[J]. SIAM Journal on Scientific Computing, 1993, 14(6): 1487–1503. doi: 10.1137/0914086. [42] CALVETTI D, REICHEL L, and SHUIBI A. L-curve and curvature bounds for Tikhonov regularization[J]. Numerical Algorithms, 2004, 35(2): 301–314. doi: 10.1023/B:NUMA.0000021764.16526.47. -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

