
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Novel Method for Tracking Complex Maneuvering Star Convex Extended Targets Using Transformer Network
-
摘要: 针对复杂的机动扩展目标跟踪问题,利用Transformer网络设计了一种有效的星凸不规则形状机动扩展目标跟踪方法。首先,该文研究利用alpha-shape算法建立了星凸形状的变化模型,实现了静态场景下的星凸形扩展目标的形状估计。然后,通过对目标状态转移矩阵进行重新设计,结合Transformer网络对机动扩展目标运动状态转移矩阵进行实时估计,实现了对复杂机动目标运动过程的精准跟踪。进一步地,将估计得到的形状轮廓与运动状态进行融合,最终实现了对星凸形机动扩展目标的实时跟踪。最后,通过构造复杂的机动扩展目标跟踪场景,利用多重性能指标测试算法对形状和运动状态的综合估计性能,验证了算法的有效性。
-
关键词:
- 扩展目标跟踪 /
- 机动目标 /
- Transformer /
- 星凸形 /
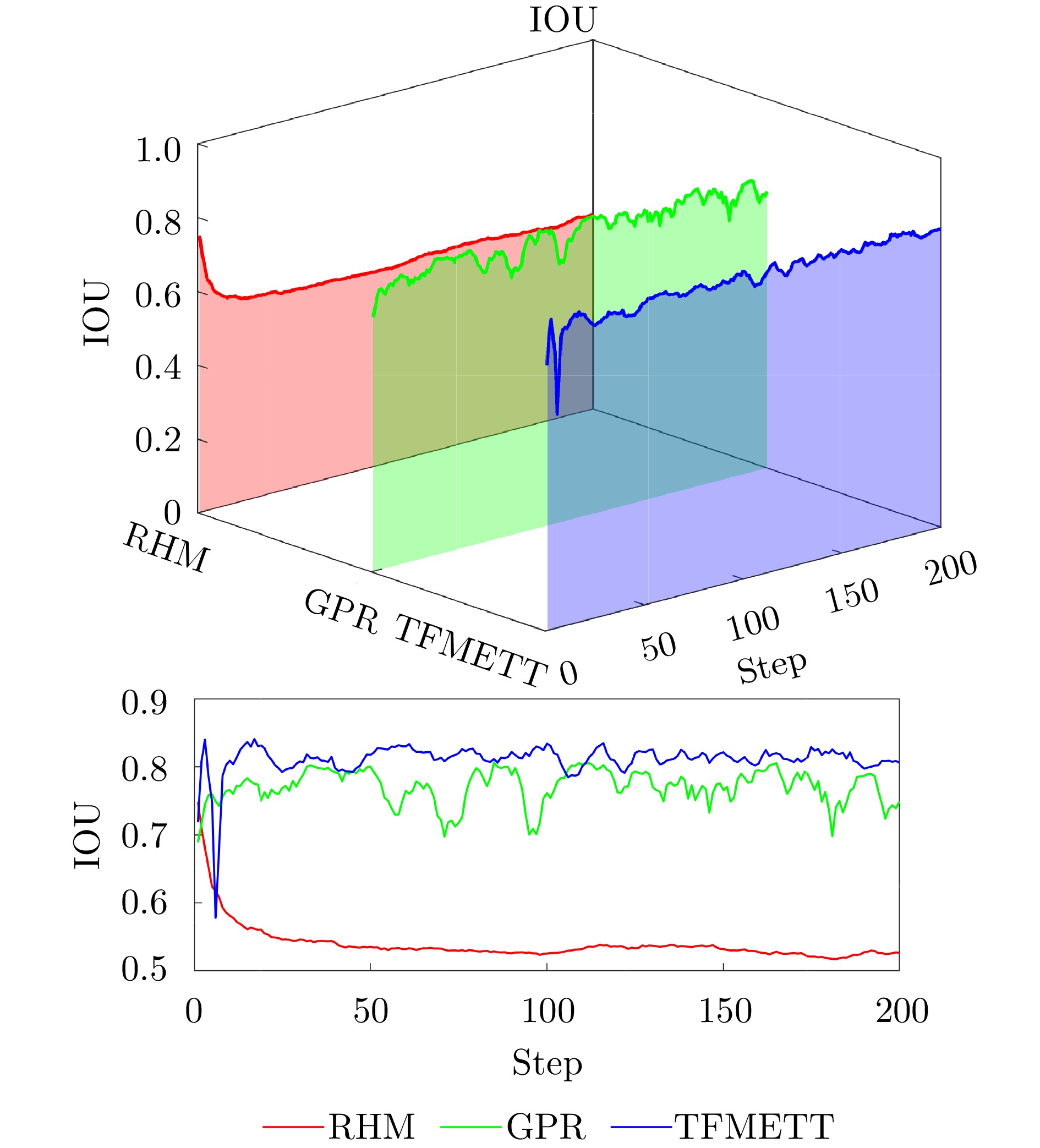
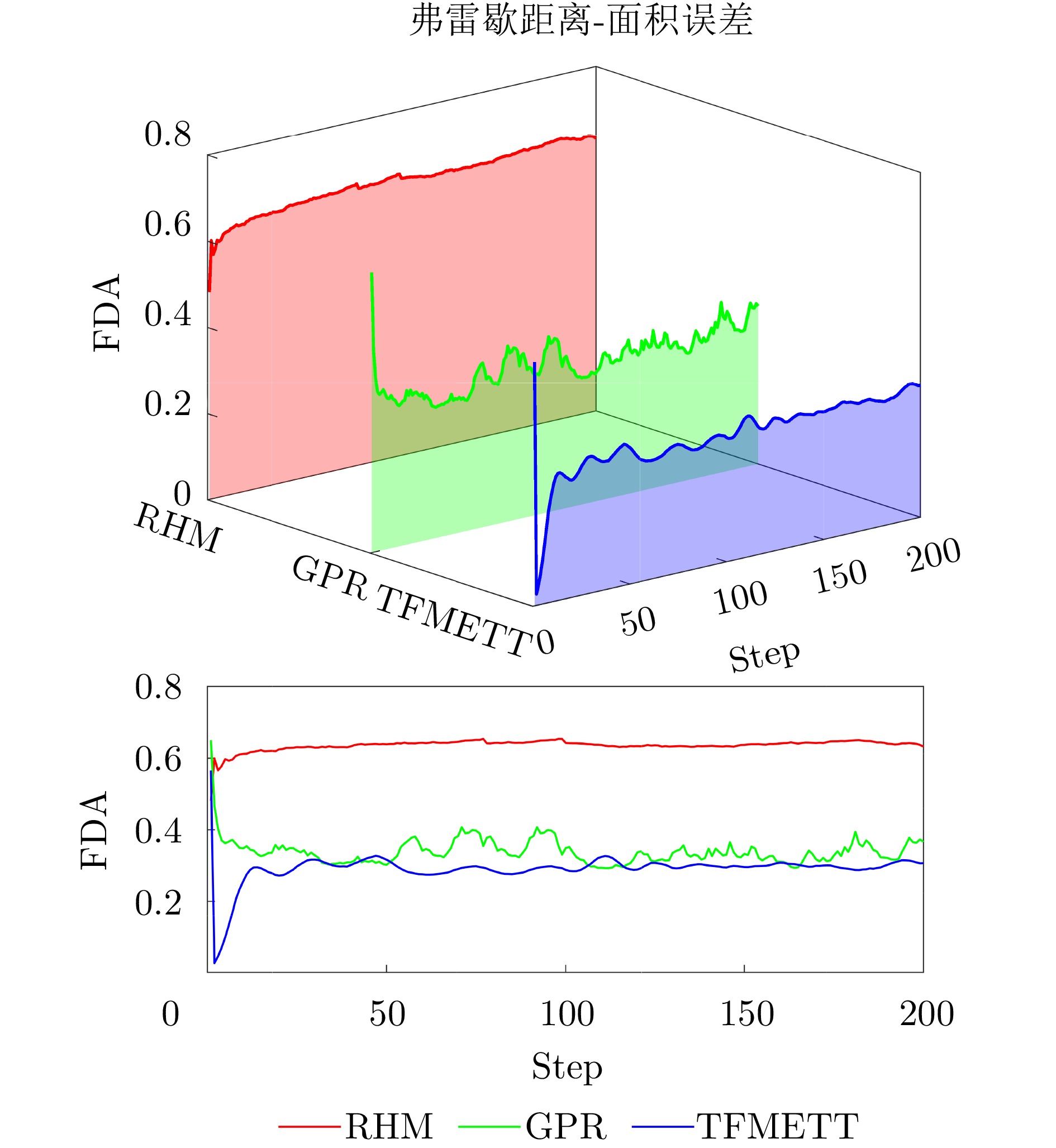
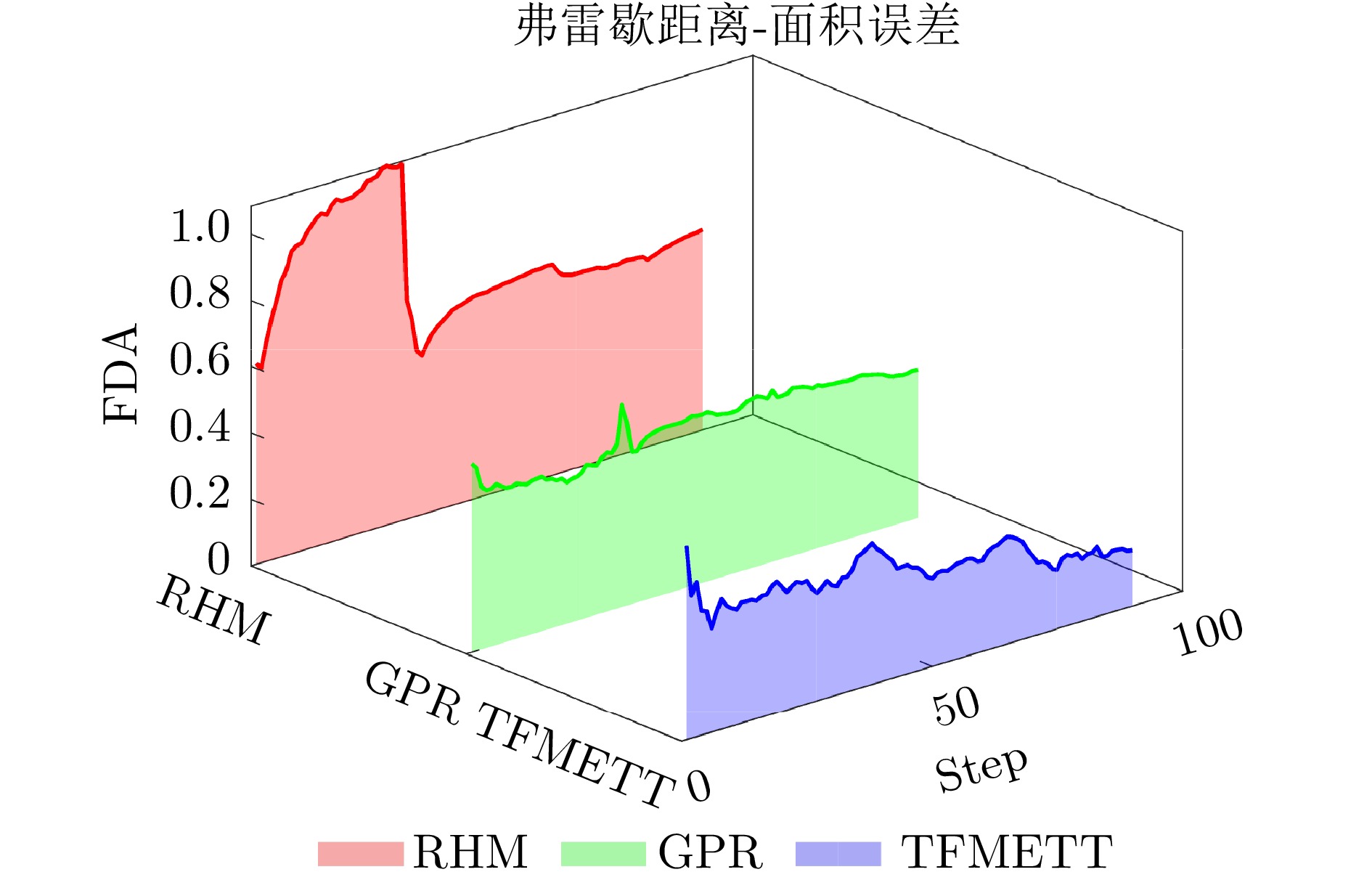
- 弗雷歇距离-面积误差
Abstract: To address the challenges in tracking complex maneuvering extended targets, an effective maneuvering extended target tracking method was proposed for irregularly shaped star-convex using a Transformer network. Initially, the alpha-shape algorithm was used to model the variations in the star-convex shape. In addition, a recursive approach was proposed to estimate the irregular shape of an extended target by detailed derivation in the Bayesian filtering framework. This approach accurately estimated the shape of a static star convex extended target. Moreover, through the structural redesign of the target state transition matrix and the real-time estimation of the maneuvering extended target’s state transition matrix using a transformer network, the accurate tracking of complex maneuvering targets was achieved. Furthermore, the real-time tracking of star convex maneuvering extended targets was achieved by fusing the estimated shape contours with motion states. This study focused on constructing certain complex maneuvering extended target tracking scenarios to assess the performance of the proposed method and the comprehensive estimation capabilities of the algorithm considering both shapes and motion states using multiple performance indicators. -
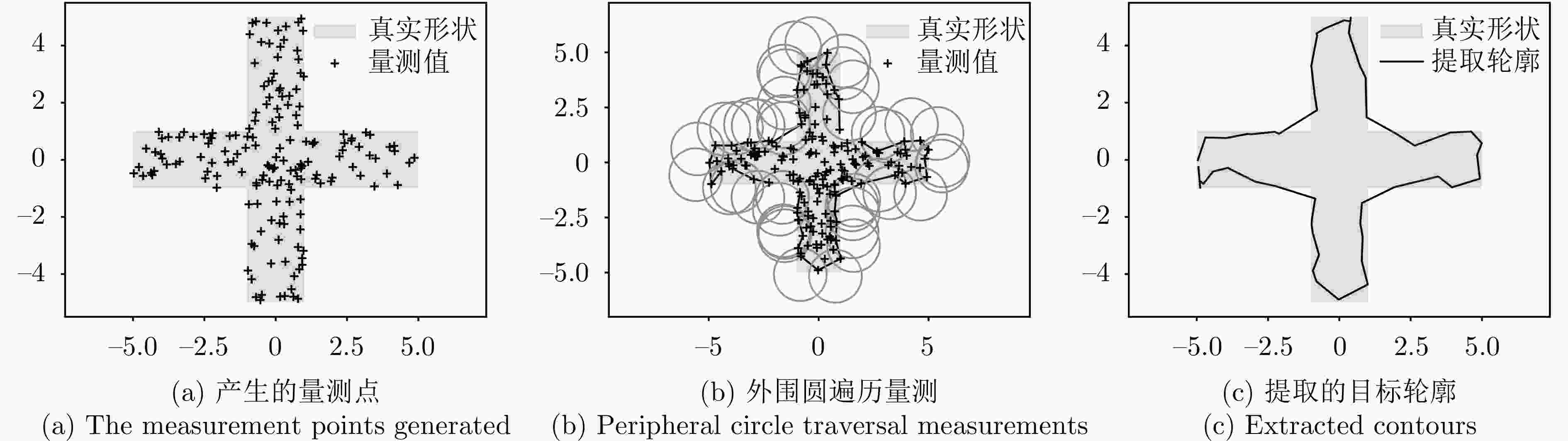
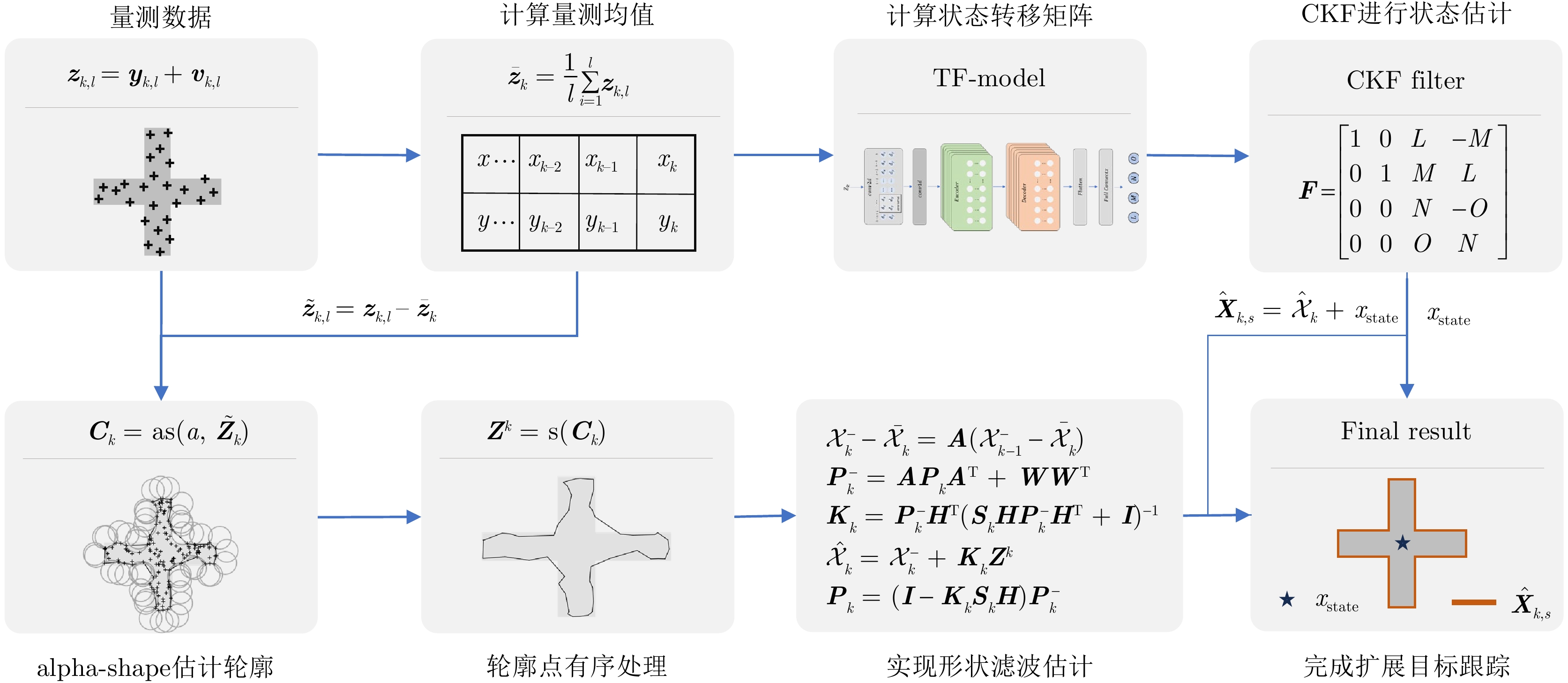
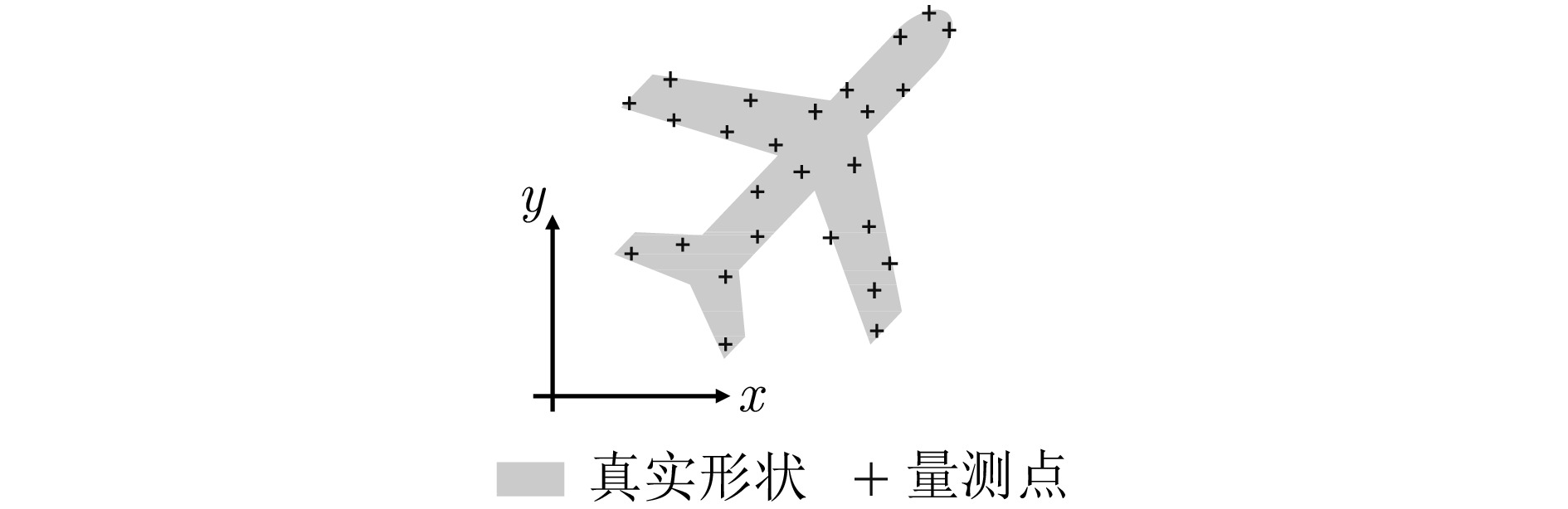
图 2 利用alpha-shape算法提取目标形状
Figure 2. Target shape extraction using alpha-shape algorithm
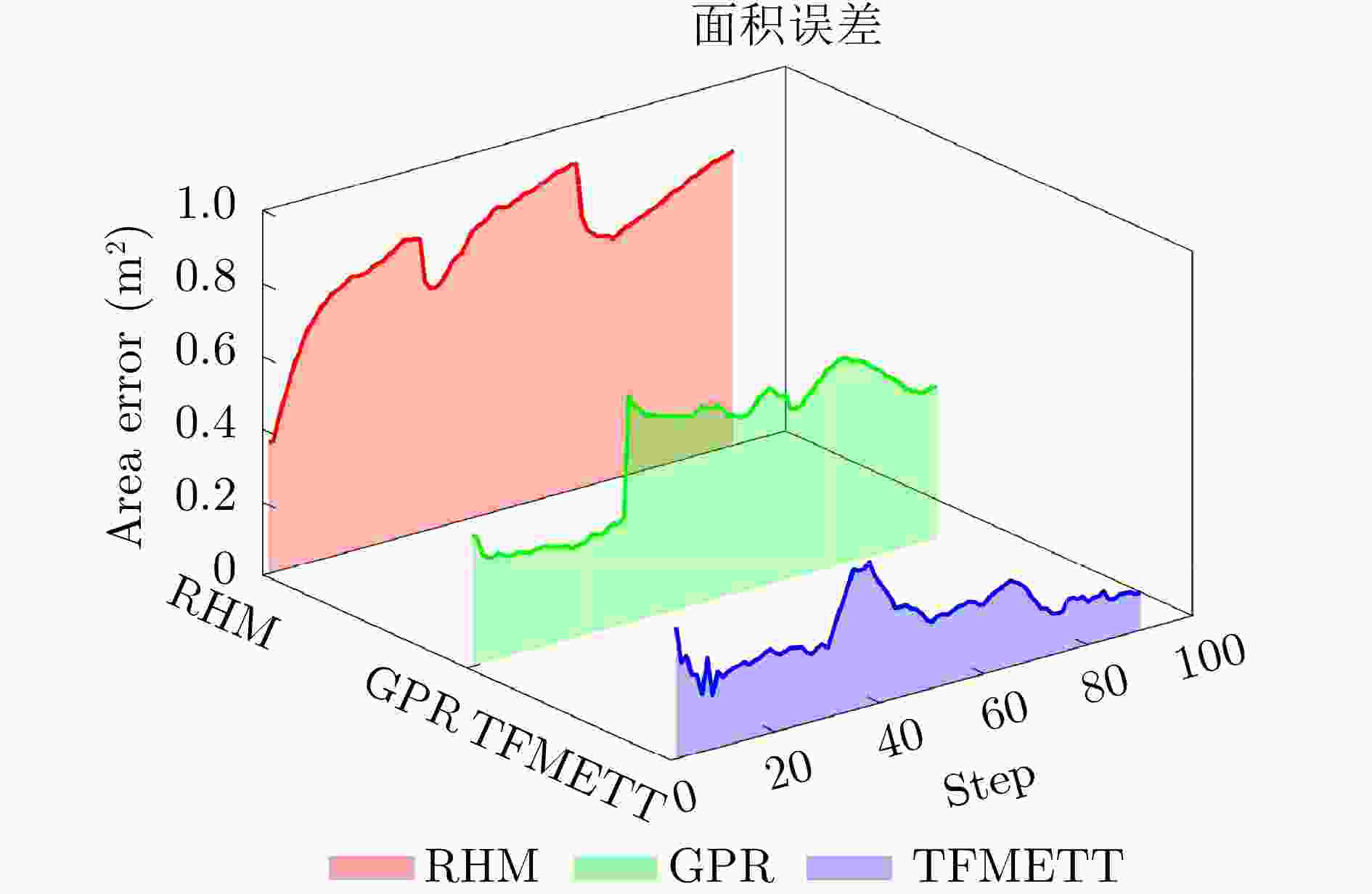
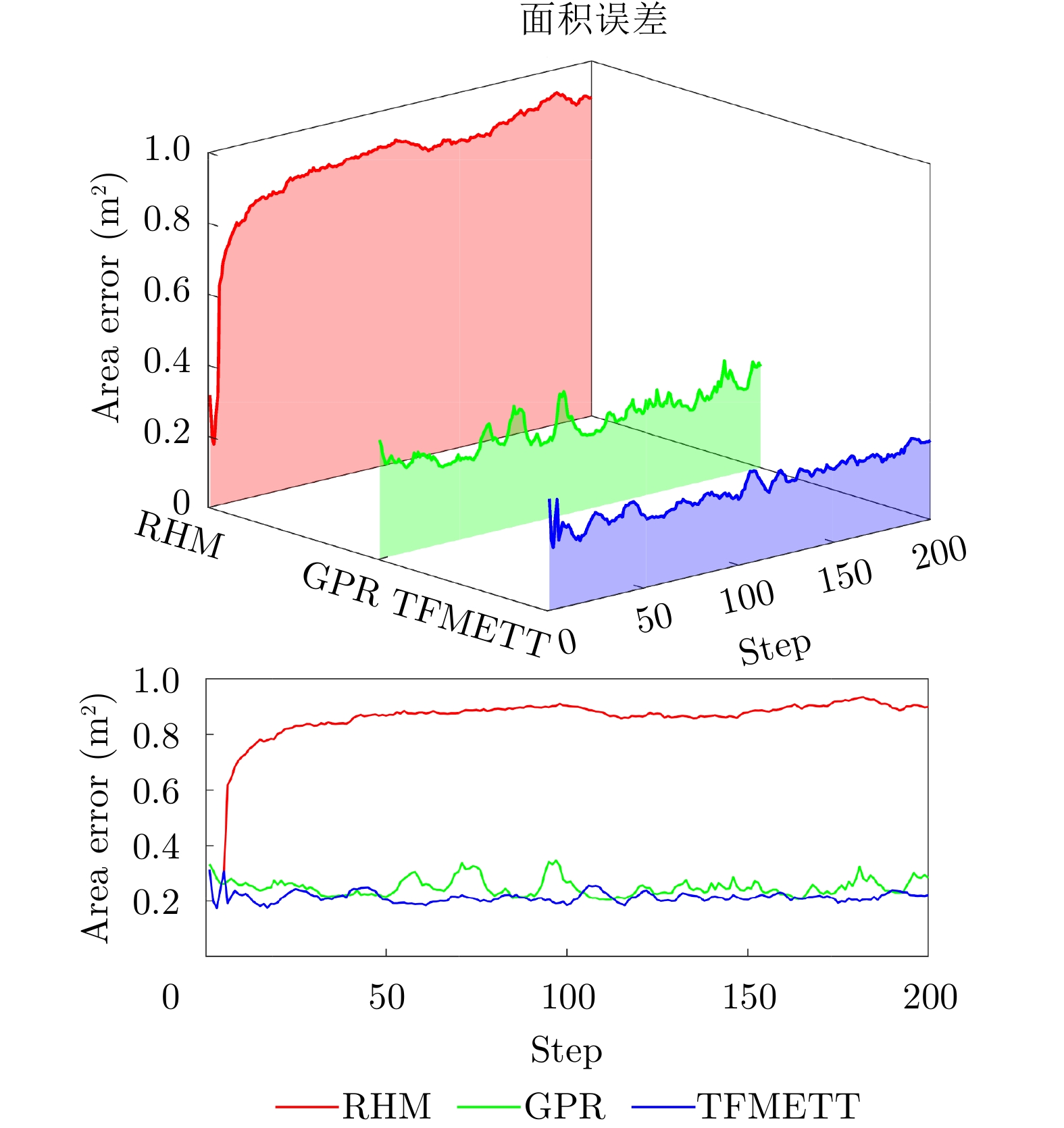
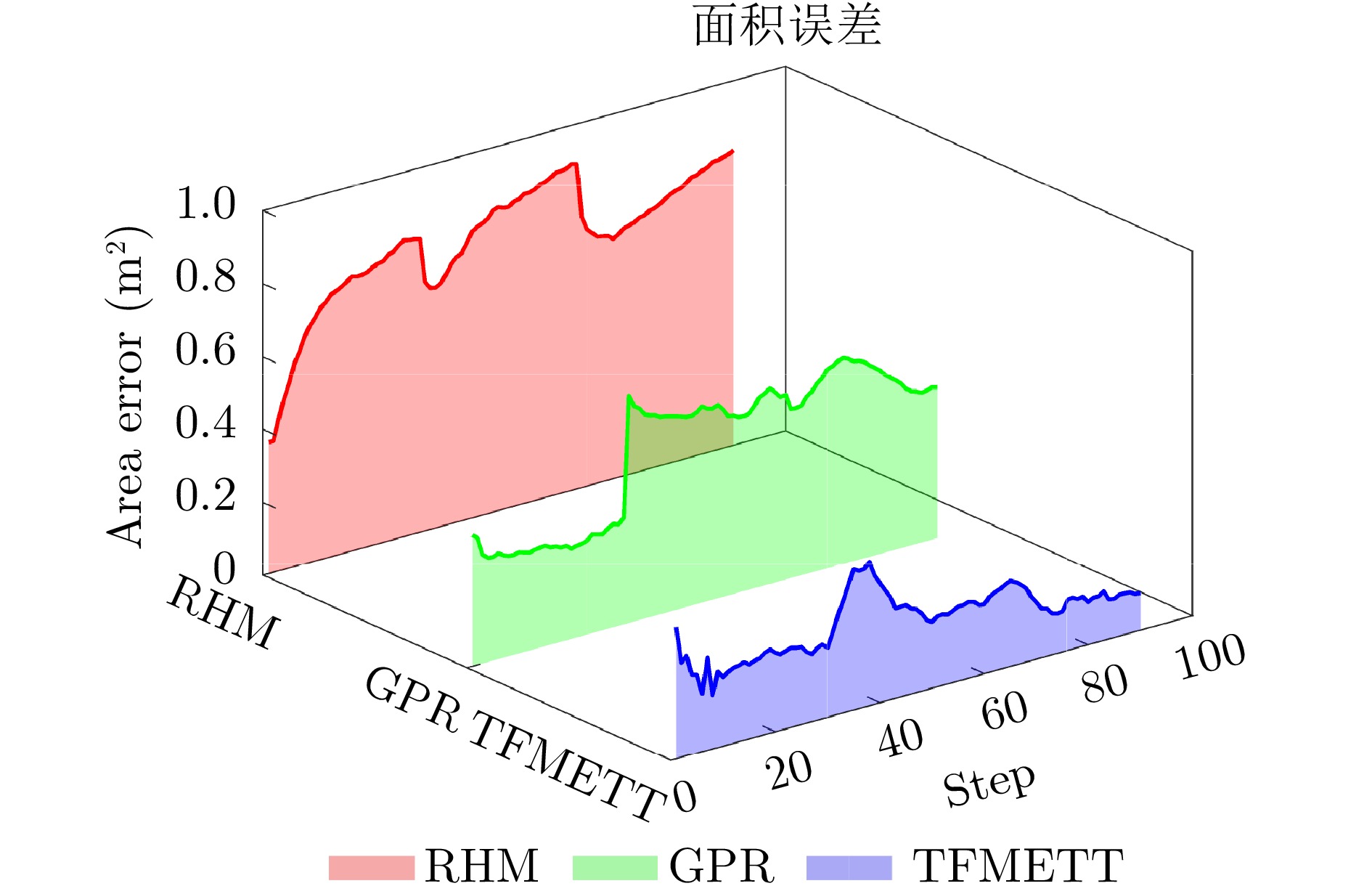
图 16 形状自适应性测试的面积误差对比
Figure 16. Comparison of area errors for the shape adaptation tests
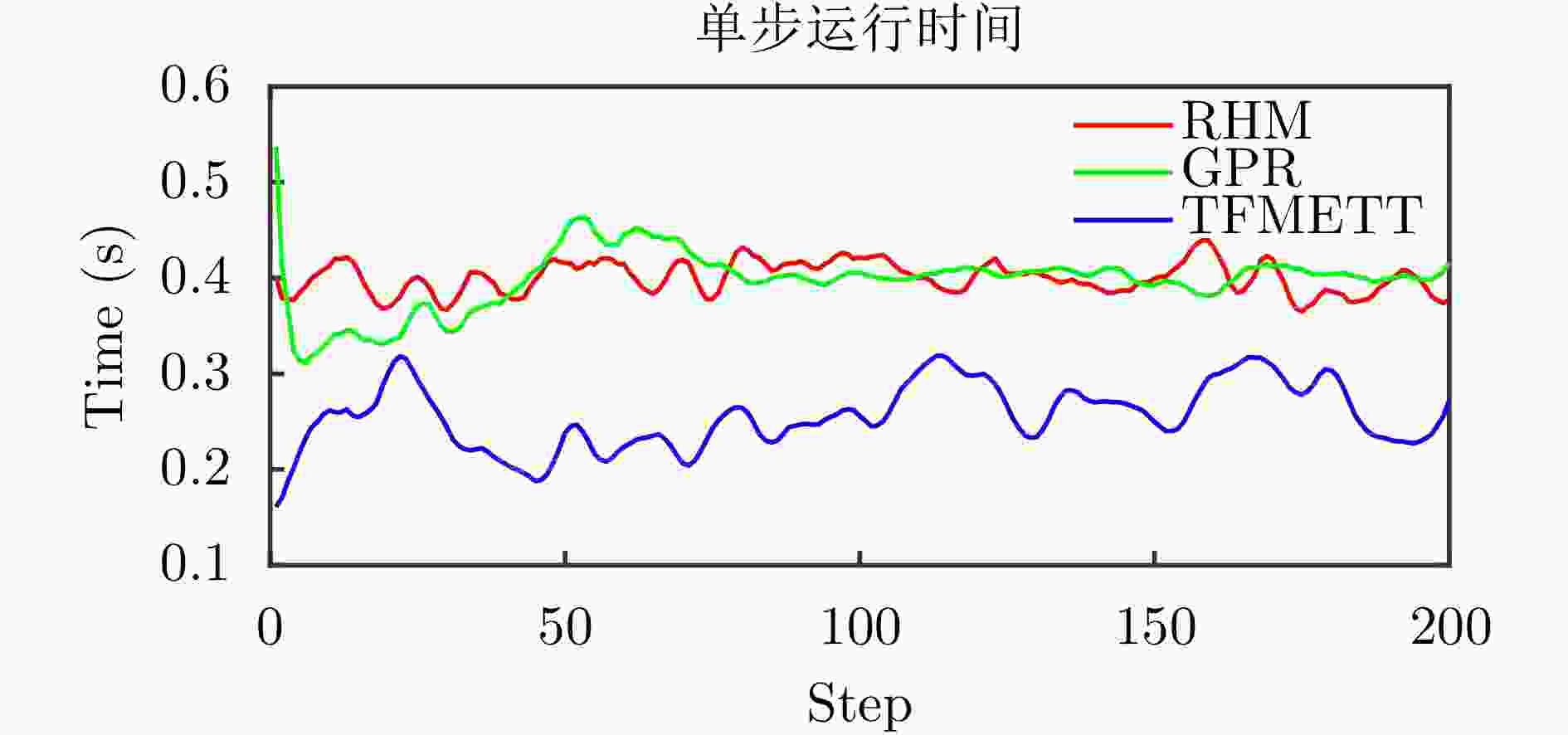
图 19 不同算法的单步运行时间对比
Figure 19. Comparison of single-step running time for different algorithms
1 结合Transformer的星凸形机动扩展目标跟踪部分伪代码
1. The pseudo-code of star convex maneuvering extended target tracking using Transformer algorithm
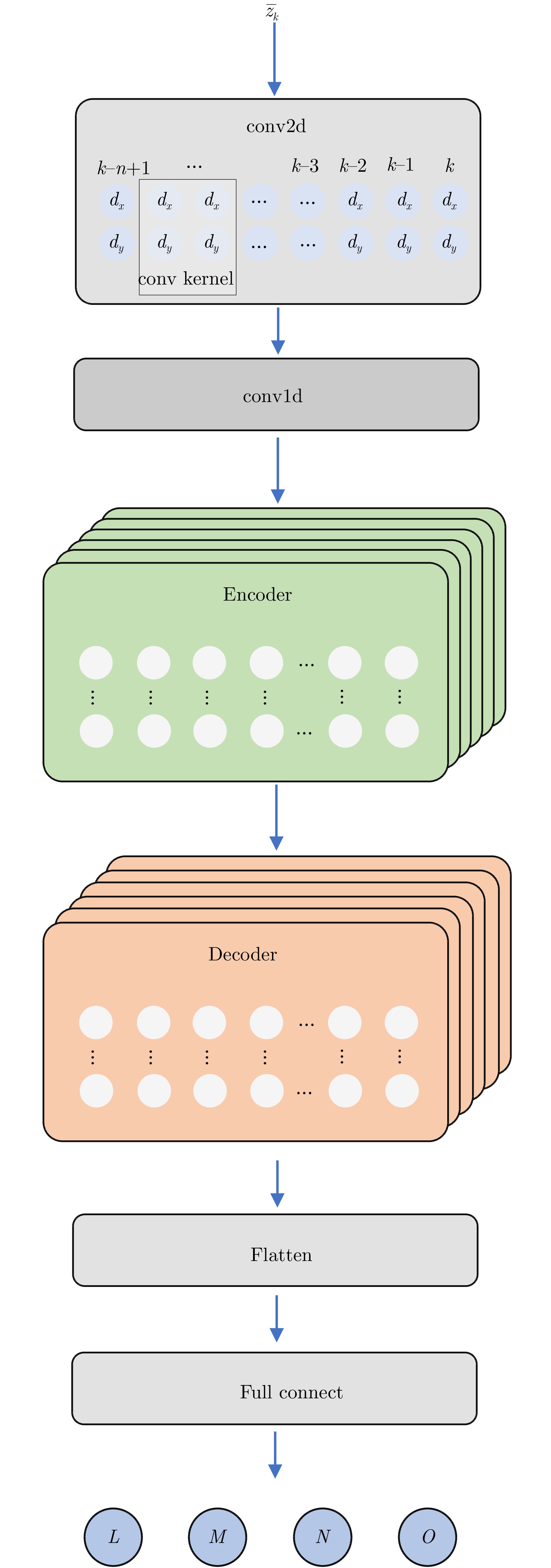
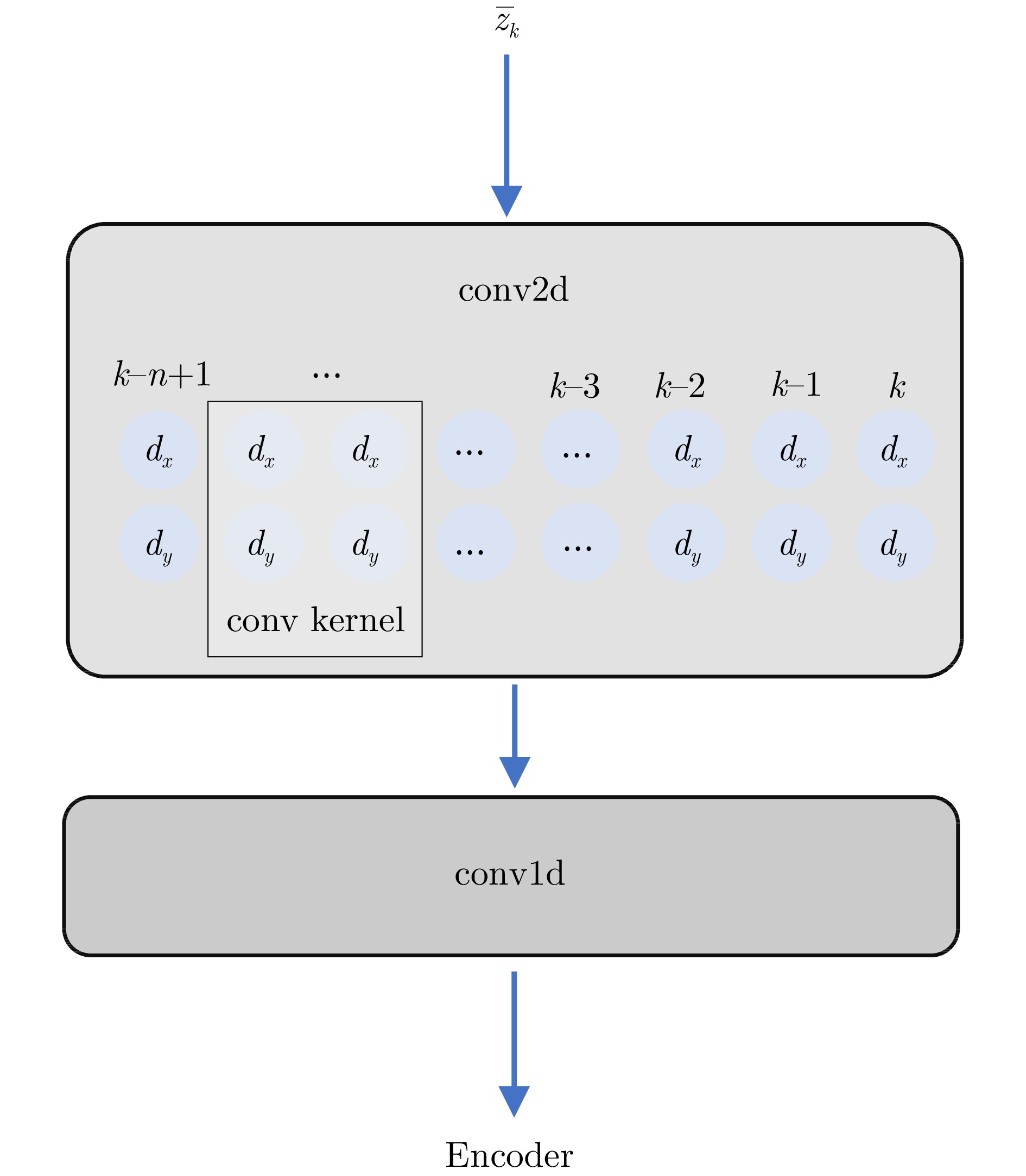
输入:$ {A_1},{A_2},{x_0},{P_0},{W_k},{U_k},{Q_k},{R_k},P_0^{{\text{cap}}} $ 步骤1:预测 for k = 1: steps % 量测集处理与形状初步处理 ${{\boldsymbol{\bar z}}_k} = \dfrac{1}{l}\displaystyle\sum\limits_{i = 1}^l {{{\boldsymbol{z}}_{k,l}}} $ ${{\boldsymbol{\tilde Z}}_k} = \{ {{\boldsymbol{\tilde z}}_{k,l}}\} $ ${{\boldsymbol{C}}_k} = {{\mathrm{as}}} (a,{{\boldsymbol{\tilde Z}}_k})$ ${{\boldsymbol{Z}}^k} = {{\mathrm{s}}} ({{\boldsymbol{C}}_k})$ % 静态形状预测 $ \mathcal{X}_k^ - - {\bar{\mathcal{X}} _k} = {\boldsymbol{A}}(\mathcal{X}_{k - 1}^ - - {\bar {\mathcal{X}} _k}) $ ${\boldsymbol{P}}_k^ - = {\boldsymbol{A}}{{\boldsymbol{P}}_k}{{\boldsymbol{A}}^{\text{T}}} + {{\boldsymbol{W}}_k}{\boldsymbol{W}}_k^{\text{T}}$ % 运动状态预测 $\hat \chi _{k - 1}^j = {\boldsymbol{F}}_k^i\chi _{k - 1}^j$ $ {{\boldsymbol{x}}_{k|k - 1}} = \dfrac{1}{m}\displaystyle\sum\limits_{j = 1}^m {\chi _{k - 1}^j} $ % 形态预测 $\mathcal{X}_{k,s}^ - = \mathcal{X}_k^ - + {{\boldsymbol{x}}_{k|k - 1}}$ end 步骤2:更新 for k = 1: steps % 静态形状更新 ${{\boldsymbol{K}}_k} = {\boldsymbol{P}}_k^ - {{\boldsymbol{H}}^{\text{T}}}{({{\boldsymbol{S}}_k}{\boldsymbol{HP}}_k^ - {{\boldsymbol{H}}^{\text{T}}} + {\boldsymbol{I}})^{ - 1}}$ ${\hat {\mathcal{X}}_k} = \mathcal{X}_k^ - + {{\boldsymbol{K}}_k}{{\boldsymbol{Z}}^k}$ ${{\boldsymbol{P}}_k} = ({\boldsymbol{I}} - {{\boldsymbol{K}}_k}{{\boldsymbol{S}}_k}{\boldsymbol{H}}){\boldsymbol{P}}_k^ - $ % 状态转移矩阵更新 ${{\boldsymbol{F}}_k} = {\text{TFMETT}}({{\boldsymbol{\bar z}}_k})$ % 运动状态更新 ${{\boldsymbol{\hat x}}_k} = {{\boldsymbol{x}}_{k|k - 1}} + {\boldsymbol{K}}_k^{{\text{cap}}}({{\boldsymbol{\bar z}}_k} - {{\boldsymbol{z}}_{k|k - 1}})$ ${\boldsymbol{P}}_k^{{\text{cap}}} = {\boldsymbol{P}}_{k|k - 1}^{{\text{cap}}} - {\boldsymbol{K}}_k^{{\text{cap}}}{\boldsymbol{S}}_k^{{\text{cap}}}{\left( {{\boldsymbol{K}}_k^{{\text{cap}}}} \right)^{\text{T}}}$ % 形态更新 ${\hat {\mathcal{X}}_{k,s}} = {\hat {\mathcal{X}}_k} + {{\boldsymbol{\hat x}}_k}$ end 输出:${\hat {\mathcal{X}}_{k,s}}$  下载: 导出CSV
下载: 导出CSV
表 1 50次蒙特卡罗仿真测试中各种算法的平均单步运行时间
Table 1. Average single-step running time of various algorithms in 50 Monte Carlo simulation tests
算法 平均单步运行时间(s) RHM 0.38 GPR 0.41 TFMETT 0.26
下载: 导出CSV
-
[1] GRANSTRÖM K and BAUM M. A tutorial on multiple extended object tracking[EB/OL]. https://www.techrxiv.org/doi/full/10.36227/techrxiv.19115858.v1, 2022. [2] LAN Jian. Extended object tracking using random matrix with extension-dependent measurement numbers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(04): 4464–4477. doi: 10.1109/TAES.2023.3241888. [3] MANNARI P, THARMARASA R, and KIRUBARAJAN T. Extended target tracking under multitarget tracking framework for convex polytope shapes[J]. Signal Processing, 2024, 217: 109321. doi: 10.1016/j.sigpro.2023.109321. [4] TAN Jintao, QI Guoqing, QI Junjie, et al. Model parameter adaptive approach of extended object tracking using random matrix and identification[C]. 2022 International Conference on Cyber-Physical Social Intelligence, Nanjing, China, 2022: 91–97. doi: 10.1109/ICCSI55536.2022.9970662. [5] BAUR T, REUTER J, ZEA A, et al. Extent estimation of sailing boats applying elliptic cones to 3D LiDAR data[C]. 2022 25th International Conference on Information Fusion (FUSION), Linksping, Sweden, 2022: 1–8. doi: 10.23919/FUSION49751.2022.9841265. [6] ZHANG Yongquan, JI Hongbing, and HU Qi. A box-particle implementation of standard PHD filter for extended target tracking[J]. Information Fusion, 2017, 34: 55–69. doi: 10.1016/j.inffus.2016.06.007. [7] ZHANG Xiaoxiao and LAN Jian. Measurement combination estimator for multisensor extended object tracking using random matrix[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(1): 698–715. doi: 10.1109/TAES.2023.3329075. [8] BAUM M and HANEBECK U D. Random hypersurface models for extended object tracking[C]. 2009 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ajman, UAE, 2009: 178–183. doi: 10.1109/ISSPIT.2009.5407526. [9] BAUM M and HANEBECK U D. Shape tracking of extended objects and group targets with star-convex RHMs[C]. 14th International Conference on Information Fusion, Chicago, USA, 2011: 1–8. [10] YANG Jinlong, LI Peng, and GE Hongwei. Extended target shape estimation by fitting B-spline curve[J]. Journal of Applied Mathematics, 2014, 2014: 741892. doi: 10.1155/2014/741892. [11] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362. [12] FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064. [13] SWAIN A and CLARK D. Extended object filtering using spatial independent cluster processes[C]. 2010 13th International Conference on Information Fusion, Edinburgh, UK, 2010: 1–8. doi: 10.1109/ICIF.2010.5711886. [14] ABDALLAH F, GNING A, and BONNIFAIT P. Box particle filtering for nonlinear state estimation using interval analysis[J]. Automatica, 2008, 44(3): 807–815. doi: 10.1016/j.automatica.2007.07.024. [15] LAN Jian and LI Xiaorong. Tracking of maneuvering non-ellipsoidal extended object or target group using random matrix[J]. IEEE Transactions on Signal Processing, 2014, 62(9): 2450–2463. doi: 10.1109/TSP.2014.2309561. [16] LAN Jian and LI Xiaorong. Tracking of extended object or target group using random matrix—part I: New model and approach[C]. 2012 15th International Conference on Information Fusion, Singapore, Singapore, 2012: 2177–2184. [17] WAHLSTROM N and ÖZKAN E. Extended target tracking using Gaussian processes[J]. IEEE Transactions on Signal Processing, 2015, 63(16): 4165–4178. doi: 10.1109/TSP.2015.2424194. [18] LI Xiaorong and ZHANG Youmin. Multiple-model estimation with variable structure. V. Likely-model set algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 448–466. doi: 10.1109/7.845222. [19] LI Xiaorong, ZWI X, and ZWANG Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 225–241. doi: 10.1109/7.745694. [20] JILKOV V P, ANGELOVA D S, and SEMERDJIEV T A. Design and comparison of mode-set adaptive IMM algorithms for maneuvering target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 343–350. doi: 10.1109/7.745704. [21] 王昱淇, 卢宙, 蔡云泽. 基于一致性的分布式变结构多模型方法[J]. 自动化学报, 2021, 47(7): 1548–1557. doi: 10.16383/j.aas.c190091.WANG Yuqi, LU Zhou, and CAI Yunze. Consensus-based distributed variable structure multiple model[J]. Acta Automatica Sinica, 2021, 47(7): 1548–1557. doi: 10.16383/j.aas.c190091. [22] 赵楚楚, 王子微, 丁冠华, 等. 基于模糊逻辑的改进自适应IMM跟踪算法[J]. 信号处理, 2021, 37(5): 724–734. doi: 10.16798/j.issn.1003-0530.2021.05.005.ZHAO Chuchu, WANG Ziwei, DING Guanhua, et al. Fuzzy-logic adaptive IMM algorithm for target tracking[J]. Journal of Signal Processing, 2021, 37(5): 724–734. doi: 10.16798/j.issn.1003-0530.2021.05.005. [23] LIU Jingxian, YANG Shuhong, and YANG Fan. A cross-and-dot-product neural network based filtering for maneuvering-target tracking[J]. Neural Computing and Applications, 2022, 34(17): 14929–14944. doi: 10.1007/s00521-022-07338-7. [24] SONG Fei, LI Yong, CHENG Wei, et al. An improved Kalman filter based on long short-memory recurrent neural network for nonlinear radar target tracking[J]. Wireless Communications and Mobile Computing, 2022, 2022: 8280428. doi: 10.1155/2022/8280428. [25] GAO Chang, LIU Hongwei, ZHOU Shenghua, et al. Maneuvering target tracking with recurrent neural networks for radar application[C]. 2018 International Conference on Radar (RADAR), Brisbane, Australia, 2018: 1–5. doi: 10.1109/RADAR.2018.8557284. [26] YU Wanting, YU Hongyi, DU Jianping, et al. DeepGTT: A general trajectory tracking deep learning algorithm based on dynamic law learning[J]. IET Radar, Sonar & Navigation, 2021, 15(9): 1125–1150. doi: 10.1049/rsn2.12111. [27] LIU Jingxian, WANG Zulin, and XU Mai. DeepMTT: A deep learning maneuvering target-tracking algorithm based on bidirectional LSTM network[J]. Information Fusion, 2020, 53: 289–304. doi: 10.1016/j.inffus.2019.06.012. [28] JOUABER S, BONNABEL S, VELASCO-FORERO S, et al. NNAKF: A neural network adapted Kalman filter for target tracking[C]. ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, Canada, 2021: 4075–4079. doi: 10.1109/ICASSP39728.2021.9414681. [29] AFTAB W and MIHAYLOVA L. A learning Gaussian process approach for maneuvering target tracking and smoothing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 278–292. doi: 10.1109/TAES.2020.3021220. [30] NEZHADARYA E, LIU Yang, and LIU Bingbing. BoxNet: A deep learning method for 2d bounding box estimation from bird’s-eye view point cloud[C]. 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019: 1557–1564. doi: 10.1109/IVS.2019.8814058. [31] STEUERNAGEL S, THORMANN K, and BAUM M. CNN-based shape estimation for extended object tracking using point cloud measurements[C]. 2022 25th International Conference on Information Fusion (FUSION), Linksping, Sweden, 2022: 1–8. doi: 10.23919/FUSION49751.2022.9841254. [32] BARINGOLTS T V, DOMIN D V, ZHUK S Y, et al. Adaptive algorithm of maneuvering target tracking in complex jamming situation for multifunctional radar with phased antenna array[J]. Radioelectronics and Communications Systems, 2019, 62(7): 342–355. doi: 10.3103/S0735272719070021. [33] XU Xiaolong and HARADA K. Automatic surface reconstruction with alpha-shape method[J]. The Visual Computer, 2003, 19(7): 431–443. doi: 10.1007/s00371-003-0207-1. [34] EDELSBRUNNER H, KIRKPATRICK D, and SEIDEL R. On the shape of a set of points in the plane[J]. IEEE Transactions on Information Theory, 1983, 29(4): 551–559. doi: 10.1109/TIT.1983.1056714. [35] 李世林, 李红军. 自适应步长的Alpha-shape表面重建算法[J]. 数据采集与处理, 2019, 34(3): 491–499. doi: 10.16337/j.1004-9037.2019.03.012.LI Shilin and LI Hongjun. Surface reconstruction algorithm using self-adaptive step Alpha-shape[J]. Journal of Data Acquisition and Processing, 2019, 34(3): 491–499. doi: 10.16337/j.1004-9037.2019.03.012. [36] LÜTKEPOHL H. Vector Autoregressive Models[M]. HASHIMZADE N and THORNTON M A. Handbook of Research Methods and Applications in Empirical Macroeconomics. Cheltenham: Edward Elgar, 2013: 139–164. doi: 10.4337/9780857931023.00012. [37] GHIASI G, LIN T Y, and LE Q V. DropBlock: A regularization method for convolutional networks[C]. The 32nd International Conference on Neural Information Processing Systems, Montréal, Canada, 2018: 10750–10760. [38] BAI Shaojie, KOLTER J Z, and KOLTUN V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling[EB/OL]. https://arxiv.org/abs/1803.01271, 2018. [39] LUO Yi and MESGARANI N. Conv-TasNet: Surpassing ideal time-frequency magnitude masking for speech separation[J]. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2019, 27(8): 1256–1266. doi: 10.1109/TASLP.2019.2915167. [40] BADRINARAYANAN V, KENDALL A, and CIPOLLA R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481–2495. doi: 10.1109/TPAMI.2016.2644615. [41] CHO K, VAN MERRIËNBOER B, BAHDANAU D, et al. On the properties of neural machine translation: Encoder-decoder approaches[C]. Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation, Doha, Qatar, 2014: 103–111. doi: 10.3115/v1/W14-4012. [42] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. The 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 6000–6010. [43] SUBAKAN C, RAVANELLI M, CORNELL S, et al. Attention is all you need in speech separation[C]. ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, Canada, 2021: 21–25. doi: 10.1109/ICASSP39728.2021.9413901. [44] BARRON J T. A general and adaptive robust loss function[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 4326–4334. doi: 10.1109/CVPR.2019.00446. [45] ALT H and GODAU M. Computing the Fréchet distance between two polygonal curves[J]. International Journal of Computational Geometry & Applications, 1995, 5(1/2): 75–91. doi: 10.1142/S0218195995000064. -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

