
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 在诸多的军事和民用领域都存在对手目标蓄意入侵我方重要区域从事恶意伤害活动的场景。对手风险评估是基于我方传感器获取的量测数据,在线评估和预测对手行动对我方资产造成的潜在伤害和损失。为了评估随机且动态变化的对手风险,该文提出一种基于标签多伯努利(LMB)跟踪器的统计对手风险动态评估方法。首先,在LMB跟踪器的框架下,基于加性模型和乘性模型,分别推导了统计对手风险最小均方误差估计的表达式。其次,针对所涉及的非线性函数积分问题,结合混合高斯近似和抽样近似方法,提出统计对手风险最小均方误差估计的数值计算方法;最后,将统计对手风险估计方法与LMB跟踪器的迭代过程有机结合,可实现入侵的多目标对我方重要资产期望损失的动态在线评估。模拟多个具有杀伤能力的目标攻击我方雷达阵地的场景,利用雷达获取的实时点迹量测数据,验证了提出算法的有效性和性能优势。Abstract: In many military and civilian areas, there exists a scenario in which multiple intruders from an adversary attempt to enter important region of our own to carry out intentional malign activity. Adversarial Risk (AR) estimation is used to assess and predict the expected damage to our valuable assets from the actions of online adversaries based on measurements performed by sensors. To evaluate random and time-varying AR, this study proposes a stochastic AR estimation approach based on a Labeled Multi-Bernoulli (LMB) tracker. First, in the formulation of LMB filtering, expressions of the minimum mean squared error estimation of the stochastic AR are derived for the additive and multiplying model. Second, by combining the Gaussian mixture and sampling approximations, we devise a numerical calculation approach for the proposed AR estimations. Third, we achieve an online evaluation of the expected damage to our valuable assets from the adversary by embedding the proposed AR estimation and LMB filtering. The effectiveness and performance advantage of the proposed estimation algorithms are verified using measurements from radars, considering a simulated scenario wherein multiple lethal targets hit the radar positions.
-
图 1 对手目标打击我方资产场景示意图
Figure 1. A schematic diagram of the scenario where the opponent’s targets attack own assets

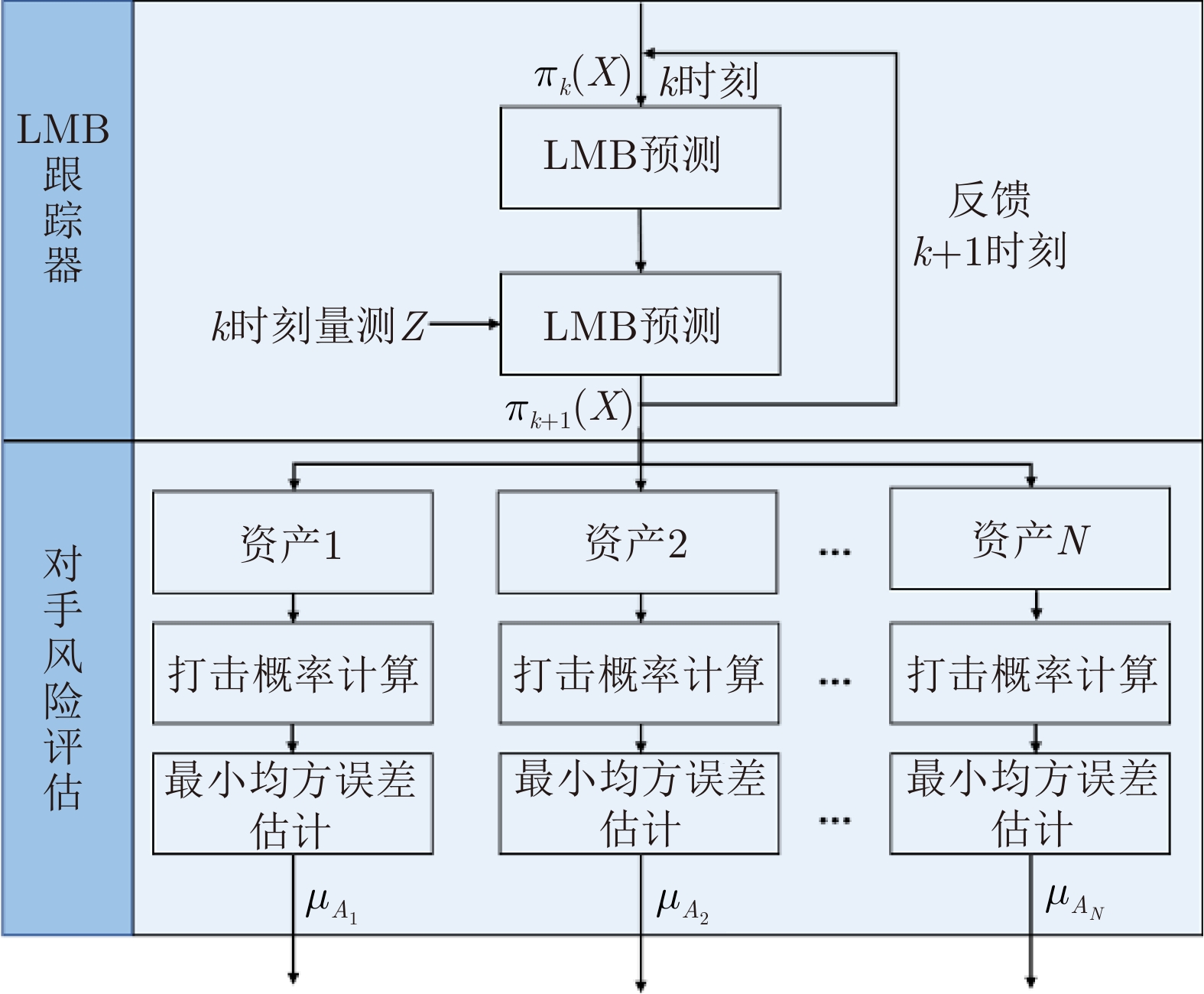
图 2 对手风险评估算法整体流程图
Figure 2. Overall flow chart of adversarial risk assessment algorithm
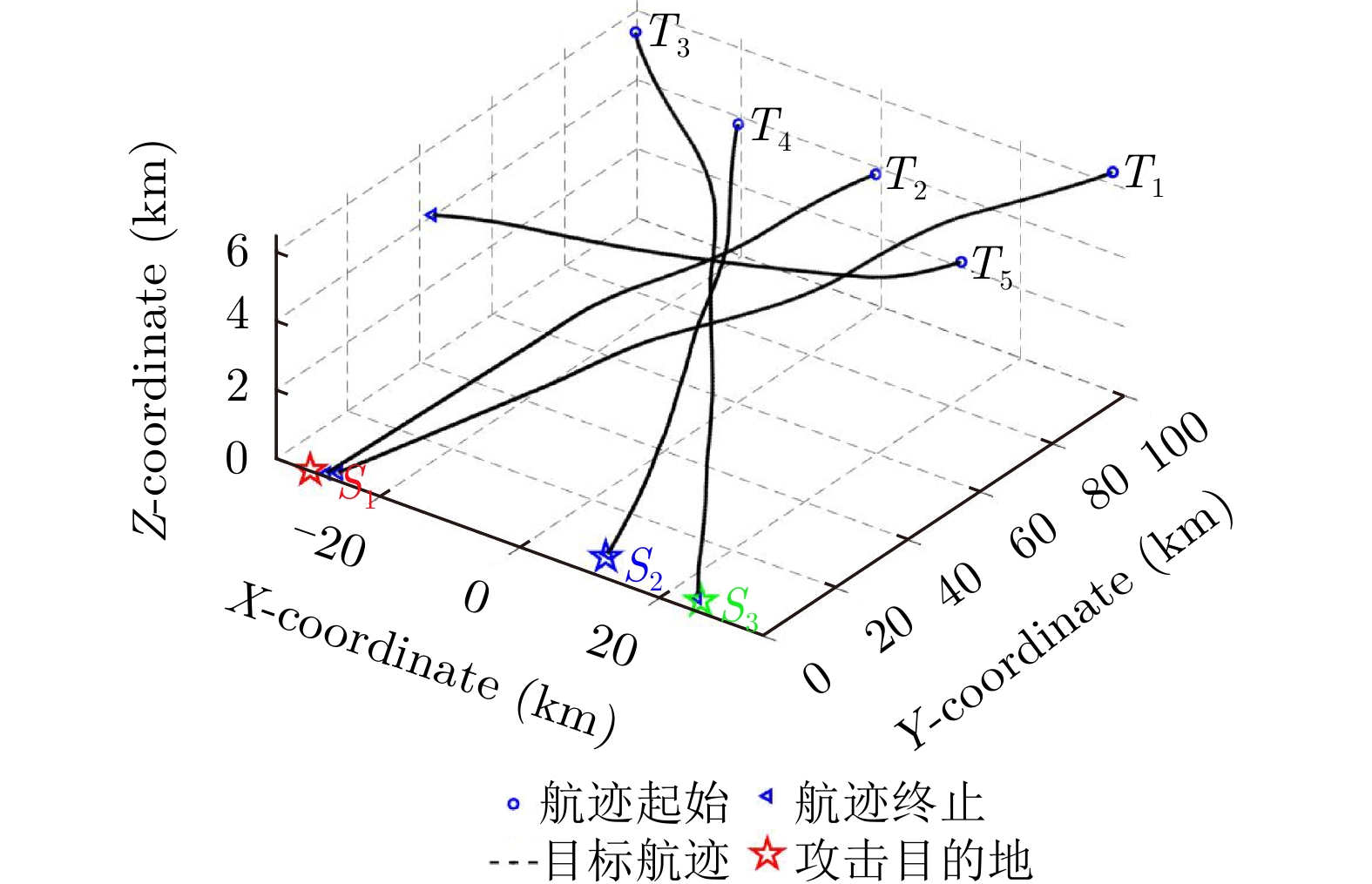
图 3 雷达监视场景-3D视图多目标真实运动轨迹
Figure 3. Radar surveillance scene-3D view multi-target real movement trajectory
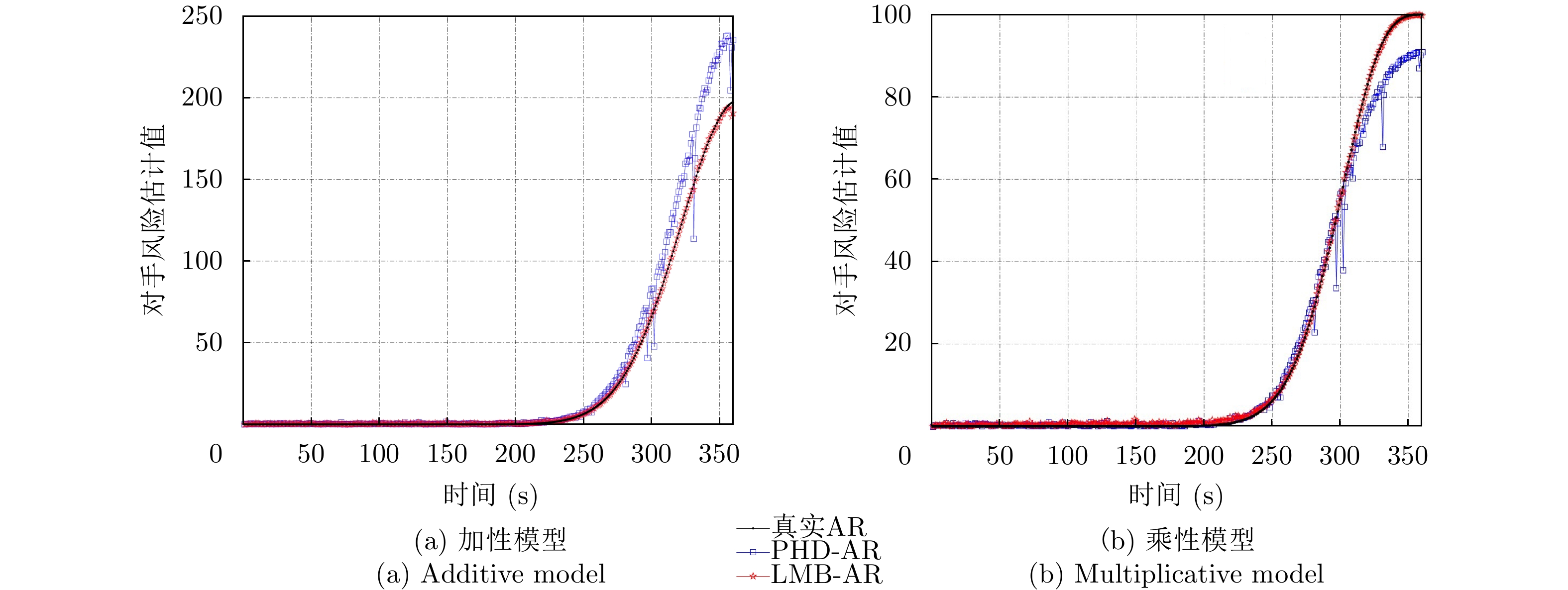
图 4 杂波率
${\lambda _{{c}}} = 25$ ,检测概率${P_{\mathrm{D}}} = 0.8$ 下,资产1的PHD-AR算法和LMB-AR算法的对手风险估计值随时间变化的曲线Figure 4. Curves of the counterparty risk estimates of asset 1’s PHD-AR algorithm and LMB-AR algorithm changing over time under the clutter rate
${\lambda _{{c}}} = 25$ and detection probability${P_{\mathrm{D}}} = 0.8$ 
图 5 LMB-AR算法的全场景对手风险估计热力图
Figure 5. Heat map of full-scenario opponent risk estimation of LMB-AR algorithm
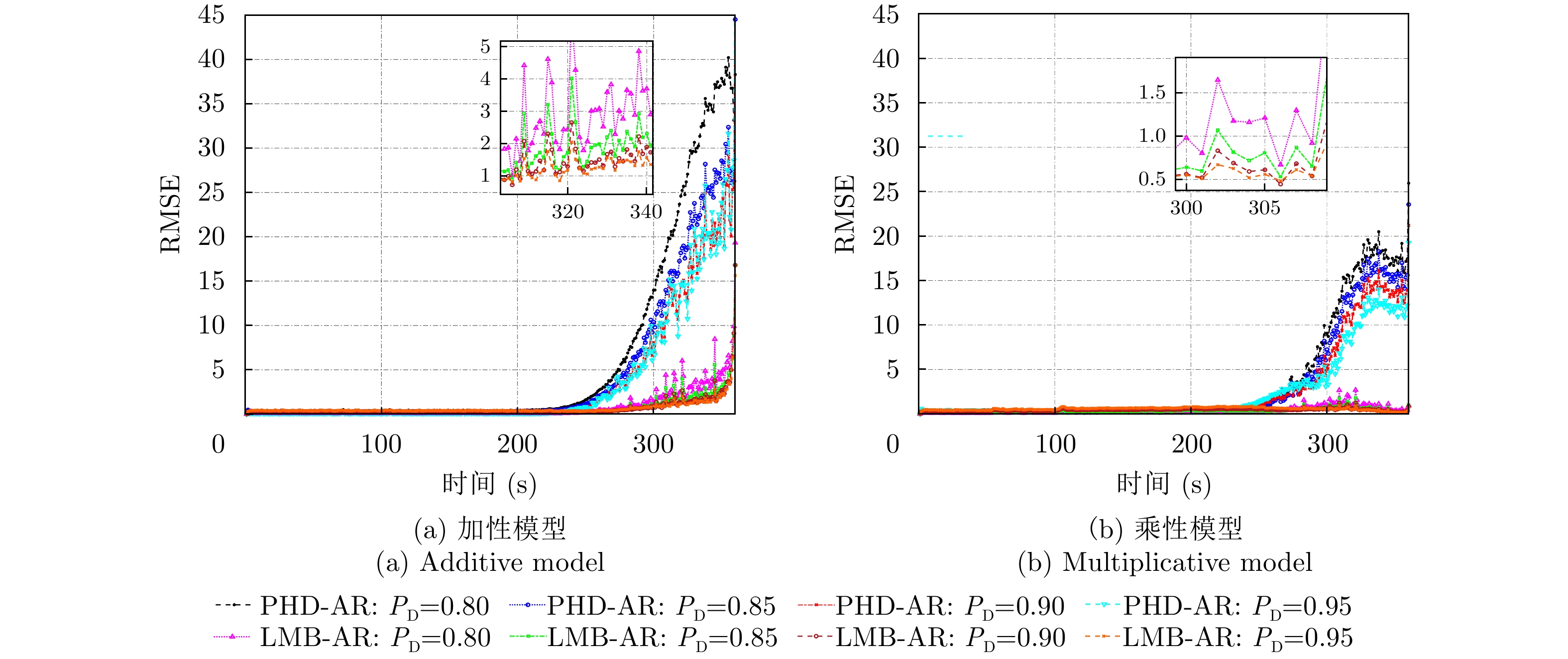
图 6 固定杂波率
${\lambda _{{c}}} = 25$ ,不同检测概率下,资产1的PHD-AR和LMB-AR的对手风险估计RMSE随时间变化的曲线Figure 6. Curve of counterparty risk estimate RMSE of asset 1’s PHD-AR and LMB-AR changing over time under fixed clutter rate
${\lambda _{{c}}} = 25$ and different detection probabilities
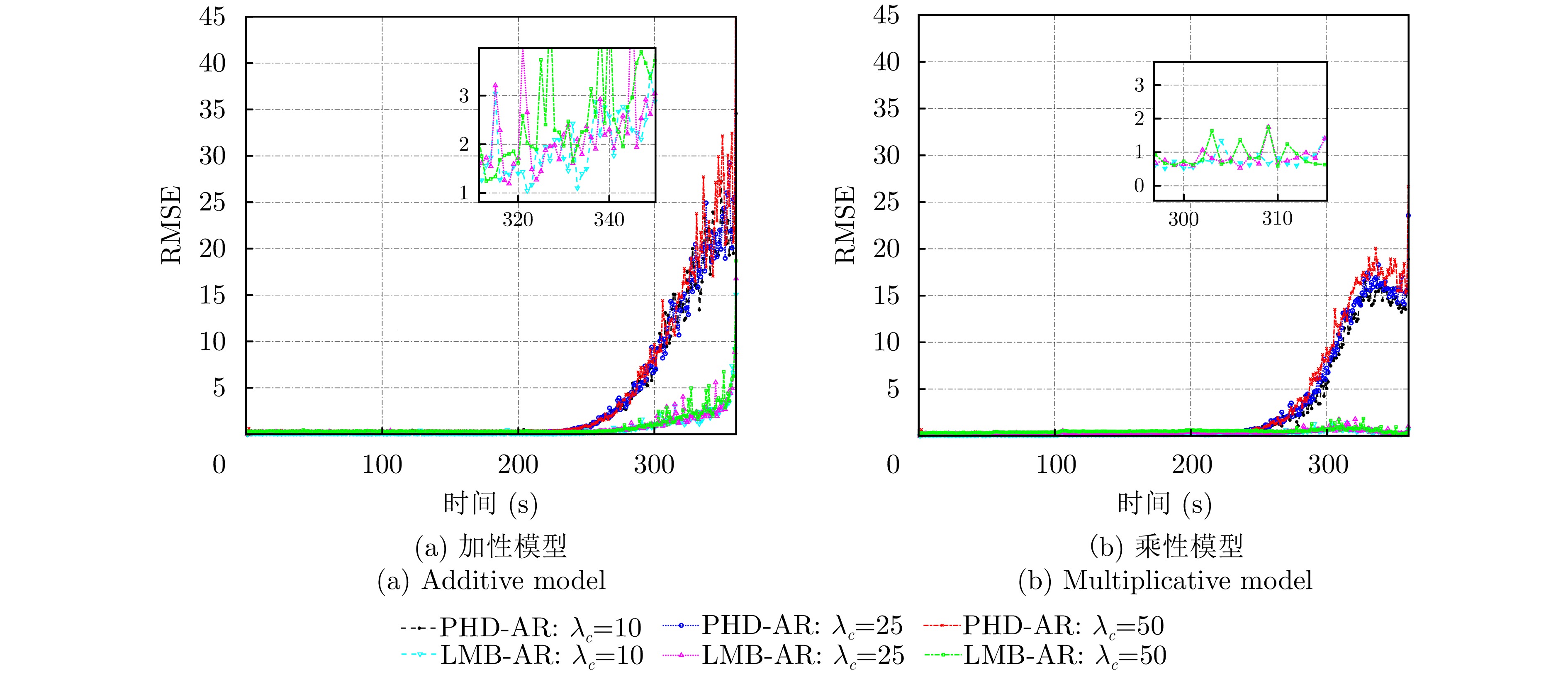
图 7 检测概率
${P_{\mathrm{D}}} = 0.90$ ,不同杂波率下,资产1的PHD-AR和LMB-AR的对手风险估计RMSE随时间变化的曲线Figure 7. Curve of the counterparty risk estimate RMSE of asset 1’s PHD-AR and LMB-AR changing over time under detection probability
${P_{\mathrm{D}}} = 0.90$ and different clutter rates表 1 不同目标的出生时刻和死亡时刻
Table 1. The birth and death moments of different targets
目标 出生帧数 死亡帧数 目标初始位置
(km, km, km)打击目的地 T1 1 360 (34,99,6.5) S1 T2 50 360 (98,80,6) S1 T3 50 360 (–30,90,6.5) S3 T4 100 360 (–10,80,6) S2 T5 100 360 (32,60,6.5) 无  下载: 导出CSV
下载: 导出CSV
表 2 杂波率
${\boldsymbol{{\lambda _{{c}}} = 25}}$ ,不同检测概率下,加性模型PHD-AR算法和LMB-AR算法资产1对手风险估值的平均RMSE比较Table 2. Comparison of average RMSE of asset 1 counterparty risk valuation of additive model PHD-AR algorithm and LMB-AR algorithm under fixed clutter rate
${\boldsymbol{{\lambda _{{c}}} = 25}}$ and different detection probabilities平均RMSE PHD-AR LMB-AR ${P_{\rm D}} = 0.95$ 3.5422 0.8065 ${P_{\rm D}} = 0.90$ 3.5789 0.6440 ${P_{\rm D}} = 0.85$ 4.4482 0.6436 ${P_{\rm D}} = 0.80$ 5.9562 0.6747
下载: 导出CSV
表 3 杂波率
${\boldsymbol{{\lambda _{{c}}}}} {\bf{= 25}}$ ,不同检测概率下,乘性模型PHD-AR算法和LMB-AR算法资产1对手风险估值的平均RMSE比较Table 3. Comparison of average RMSE of asset 1 counterparty risk valuation of multiplicative model PHD-AR algorithm and LMB-AR algorithm under fixed clutter rate
${\boldsymbol{{\lambda _{{c}}} }}{\bf{= 25}}$ and different detection probabilities平均RMSE PHD-AR LMB-AR ${P_{\rm D}} = 0.95$ 2.4355 0.3405 ${P_{\rm D}} = 0.90$ 2.6386 0.3539 ${P_{\rm D}} = 0.85$ 2.9412 0.4587 ${P_{\rm D}} = 0.80$ 3.3243 0.5771
下载: 导出CSV
表 4 检测概率
${{\boldsymbol{P}}_{\bf{D}}} {\bf{= 0.90}}$ ,不同杂波率下,加性模型PHD-AR算法和LMB-AR算法资产1对手风险估值的平均RMSE比较Table 4. Comparison of average RMSE of asset 1 counterparty risk valuation of additive model PHD-AR algorithm and LMB-AR algorithm under detection probability
${{\boldsymbol{P}}_{\bf{D}}} {\bf{= 0.90}}$ and different clutter rates平均RMSE PHD-AR LMB-AR ${\lambda _c} = 10$ 3.3973 0.5588 ${\lambda _c} = 25$ 3.5789 0.6440 ${\lambda _c} = 50$ 3.9733 0.7970
下载: 导出CSV
表 5 检测概率
${{\boldsymbol{P}}_{\bf{D}}} {\bf{= 0.90}}$ ,不同杂波率下,乘性模型PHD-AR算法和LMB-AR算法资产1对手风险估值的平均RMSE比较Table 5. Comparison of average RMSE of asset 1 counterparty risk valuation of multiplicative model PHD-AR algorithm and LMB-AR algorithm under detection probability
${\boldsymbol{{P}}_{\bf{D}}} {\bf{= 0.90}}$ and different clutter rates平均RMSE PHD-AR LMB-AR ${\lambda _c} = 10$ 2.6345 0.2561 ${\lambda _c} = 25$ 2.9412 0.3539 ${\lambda _c} = 50$ 3.3478 0.4985
下载: 导出CSV
-
[1] 刘宝旭, 徐菁, 许榕生. 黑客入侵防护体系研究与设计[J]. 计算机工程与应用, 2001, 37(8): 1–3, 29. doi: 10.3321/j.issn:1002-8331.2001.08.001LIU Baoxu, XU Jing, and XU Rongsheng. The study and design of the defence system of the hacker attacks[J]. Computer Engineering and Applications, 2001, 37(8): 1–3, 29. doi: 10.3321/j.issn:1002-8331.2001.08.001 [2] 王福军, 梅卫, 王春平, 等. 基于敌我对抗信息的目标机动态势估计[J]. 火力与指挥控制, 2010, 35(9): 152–155. doi: 10.3969/j.issn.1002-0640.2010.09.040WANG Fujun, MEI Wei, WANG Chunping, et al. Prediction of target maneuvering situation based on confrontation information between the enemy and ourselves[J]. Fire Control & Command Control, 2010, 35(9): 152–155. doi: 10.3969/j.issn.1002-0640.2010.09.040 [3] LIGGINS II M, HALL D, and LLINAS J. Handbook of Multisensor Data fusion: Theory and Practice[M]. 2nd ed. Boca Raton, USA: CRC Press, 2009: 1–870. [4] GONG Hua, YU Xiaoye, ZHANG Yong, et al. Dynamic threat assessment of air multi-target based on DBN-TOPSIS method[C]. 2021 China Automation Congress, Beijing, China, 2021: 6902–6907. [5] ROY J, PARADIS S, and ALLOUCHE M. Threat evaluation for impact assessment in situation analysis systems[C]. Signal Processing, Sensor Fusion, and Target Recognition XI, Orlando, USA, 2002: 329–341. [6] ERLANDSSON T and NIKLASSON L. Automatic evaluation of air mission routes with respect to combat survival[J]. Information Fusion, 2014, 20: 88–98. doi: 10.1016/j.inffus.2013.12.001 [7] TUZLUKOV V. Signal Processing in Radar Systems[M]. Boca Raton, USA: CRC Press, 2013: 1–632. [8] BOLDERHEIJ F. Mission-driven sensor management: Analysis, design, implementation and simulation[D]. [Ph.D. dissertation], Delft University of Technology, 2007. [9] JOHANSSON F. Evaluating the performance of TEWA systems[D]. [Ph.D. dissertation], Örebro University, 2010: 1–177. [10] NARYKOV A, DELANDE E, and CLARK D E. A Formulation of the adversarial risk for multiobject filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2082–2092. doi: 10.1109/TAES.2021.3098130 [11] LUCAS T W. Damage functions and estimates of fratricide and collateral damage[J]. Naval Research Logistics (NRL), 2003, 50(4): 306–321. doi: 10.1002/nav.10057 [12] HOFFMAN J R, SORENSEN E, STELZIG C A, et al. Scientific performance estimation of robustness and threat[C]. Signal Processing, Sensor Fusion, and Target Recognition XI, Orlando, USA, 2002: 248–258. [13] CLARK D E. Stochastic multi-object guidance laws for interception and rendezvous problems[J]. IEEE Transactions on Automatic Control, 2022, 67(3): 1482–1489. doi: 10.1109/TAC.2021.3062559 [14] MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Boston, USA: Artech House, 2007: 1–888. [15] 周雪芹, 廖力, 高峰. 伯努利滤波在单站无源跟踪中的应用[J]. 电讯技术, 2019, 59(4): 419–425. doi: 10.3969/j.issn.1001-893x.2019.04.009ZHOU Xueqin, LIAO Li, and GAO Feng. Application of Bernoulli filter in single-station passive tracking[J]. Telecommunication Engineering, 2019, 59(4): 419–425. doi: 10.3969/j.issn.1001-893x.2019.04.009 [16] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119 [17] VO B T, VO B N, and CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553–3567. doi: 10.1109/TSP.2007.894241 [18] 王佰录, 易伟, 李溯琪, 等. 分布式多目标伯努利滤波器的网络共识技术[J]. 信号处理, 2018, 34(1): 1–12. doi: 10.16798/j.issn.1003-0530.2018.01.001WANG Bailu, YI Wei, LI Suqi, et al. Consensus for distributed multi-Bernoulli filter[J]. Journal of Signal Processing, 2018, 34(1): 1–12. doi: 10.16798/j.issn.1003-0530.2018.01.001 [19] VO B T, VO B N, and CANTONI A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409–423. doi: 10.1109/TSP.2008.2007924 [20] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822 [21] VO B N, VO B T, and PHUNG D. Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24): 6554–6567. doi: 10.1109/TSP.2014.2364014 [22] SHIM C, VO B T, VO B N, et al. Linear complexity Gibbs sampling for generalized labeled multi-Bernoulli filtering[J]. IEEE Transactions on Signal Processing, 2023, 71: 1981–1994. doi: 10.1109/TSP.2023.3277220 [23] REUTER S, VO B T, VO B N, et al. The labeled multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12): 3246–3260. doi: 10.1109/TSP.2014.2323064 [24] LI Suqi, YI Wei, HOSEINNEZHAD R, et al. Multiobject tracking for generic observation model using labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2018, 66(2): 368–383. doi: 10.1109/TSP.2017.2764864 [25] LI Suqi, BATTISTELLI G, CHISCI L, et al. Computationally efficient multi-agent multi-object tracking with labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2019, 67(1): 260–275. doi: 10.1109/TSP.2018.2880704 [26] LI Suqi, YI Wei, HOSEINNEZHAD R, et al. Robust distributed fusion with labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2018, 66(2): 278–293. doi: 10.1109/TSP.2017.2760286 [27] 李溯琪. 基于标号随机集的传感器网络分布式融合技术研究[D]. [博士论文], 电子科技大学, 2018: 1–142.LI Suqi. Labeled random finite set based distributed fusion over sensor network[D]. [Ph.D. dissertation], University of Electronic Science and Technology of China, 2018: 1–142. [28] NGUYEN T T D, VO B N, VO B T, et al. Tracking cells and their lineages via labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2021, 69: 5611–5626. doi: 10.1109/TSP.2021.3111705 [29] 徐开明, 王佰录, 李溯琪, 等. 低空监视雷达“走-停-走”目标跟踪技术[J]. 雷达学报, 2022, 11(3): 443–458. doi: 10.12000/JR21211XU Kaiming, WANG Bailu, LI Suqi, et al. Move-stop-move target tracking with low-altitude surveillance radars[J]. Journal of Radars, 2022, 11(3): 443–458. doi: 10.12000/JR21211 [30] WANG Bailu, LI Suqi, YI Wei, et al. Performance analysis for parallel grouping-based labeled multi-Bernoulli filter[J]. Signal Processing, 2023, 202: 108779. doi: 10.1016/j.sigpro.2022.108779 [31] WITKOWSKI M, WHITE G, LOUVIERIS P, et al. High-level information fusion and mission planning in highly anisotropic threat spaces[C]. IEEE 11th International Conference on Information Fusion, Cologne, Germany, 2008: 1–8. [32] NARYKOV A, DELANDE E, CLARK D, et al. Second-order statistics for threat assessment with the PHD filter[C]. Sensor Signal Processing for Defence Conference (SSPD), London, UK, 2017: 1–5. [33] HORREY W J, WICKENS C D, STRAUSS R, et al. Supporting situation assessment through attention guidance and diagnostic aiding: The benefits and costs of display enhancement on judgment skill[J]. Adaptive Perspectives on Human-Technology Interaction: Methods and Models for Cognitive Engineering and Human-Computer Interaction, 2006: 55–70. [34] FANG Fang, HE Jiafan, LI Qingwei, et al. Weapon-target assignment based on improved particle swarm optimization for different allocation criteria[C]. 2021 China Automation Congress (CAC), Beijing, China, 2021: 6628–6633. [35] JOHANSSON F and FALKMAN G. A Bayesian network approach to threat evaluation with application to an air defense scenario[C]. IEEE 11th International Conference on Information Fusion, Cologne, Germany, 2008: 1–7. [36] LITTLE E G and ROGOVA G L. An ontological analysis of threat and vulnerability[C]. IEEE 9th International Conference on Information Fusion, Florence, Italy, 2006: 1–8. [37] GUERRIERO M, SVENSSON L, SVENSSON D, et al. Shooting two birds with two bullets: How to find minimum mean OSPA estimates[C]. IEEE 13th International Conference on Information Fusion, Edinburgh, UK, 2010: 1–8. [38] PAPAGEORGIOU D and RAYKIN M. A risk-based approach to sensor resource management[C]. Advances in Cooperative Control and Optimization. Berlin, Germany: Springer, 2007: 129–144. [39] ANGLEY D, RISTIC B, MORAN W, et al. Search for targets in a risky environment using multi-objective optimisation[J]. IET Radar, Sonar & Navigation, 2019, 13(1): 123–127. doi: 10.1049/iet-rsn.2018.5184 [40] DITZEL M, KESTER L, VAN DEN BROEK S, et al. Cross-layer utility-based system optimization[C]. The IEEE 16th International Conference on Information Fusion, Istanbul, Turkey, 2013: 507–514. [41] KATSILIERIS F, DRIESSEN H, and YAROVOY A. Threat-based sensor management for target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2772–2785. doi: 10.1109/TAES.2015.140052 [42] BENAVOLI A, RISTIC B, FARINA A, et al. An application of evidential networks to threat assessment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(2): 620–639. doi: 10.1109/TAES.2009.5089545 -



















计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

