
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Multitarget Tracking Using Distributed Radar with Partially Overlapping Fields of Views
-
摘要: 在探测能力、波形设计及天线指向等因素制约下,分布式雷达视场并非完全重合,由此造成的观测信息差异给后续信息融合带来了巨大挑战。该文基于高斯混合实现的集势概率假设密度(CPHD)滤波器,提出了一种视场部分重叠下的分布式雷达多目标跟踪方法。首先,利用多目标密度乘积切分出概率假设密度(PHD)中表征共同观测信息的部分;之后,标准的分布式融合(算术平均或几何平均融合)方法作用于切分出的共同观测目标信息以提升跟踪性能,补偿融合则作用于雷达单独观测目标信息以扩展视场范围。该文方法无须视场先验信息,能够适应雷达视场未知时的分布式融合多目标跟踪场景。仿真实验验证了所提出方法在未知、时变雷达视场下跟踪多目标的性能,表明了该文方法比基于高斯混合的聚类方法性能更好。Abstract: The Fields of Views (FoVs) of radars in a distributed network partially overlap due to detecting capability, waveform design, and antenna orientation constraints, resulting in observed discrepancies between radars and a significant obstacle to future information fusion. In this paper, we propose a distributed multitarget tracking method under the scene of partially overlapping radar FoVs, based on the Gaussian Mixture Cardinalized Probability Hypothesis Density (GM-CPHD) filter. First, we employ the product of the multitarget densities to split the PHD functions and find the part that characterizes the information of the targets commonly observed by multiple radars. Then, a standard distributed fusion (arithmetic average or geometric average fusion) acts on the splitting information to improve tracking performance, and a compensation fusion acts on the remaining information to expand the observation FoV. The proposed method does not require prior knowledge of the radar’s FoV and may adapt to the scene of distributed multitarget tracking while the FoVs are unknown. Simulations are provided to verify the effectiveness of the proposed approach under the scene of unknown and time-varying radar FoVs, and show that the proposed method has better performance than that of the cluster method based on Gaussian matching.
-
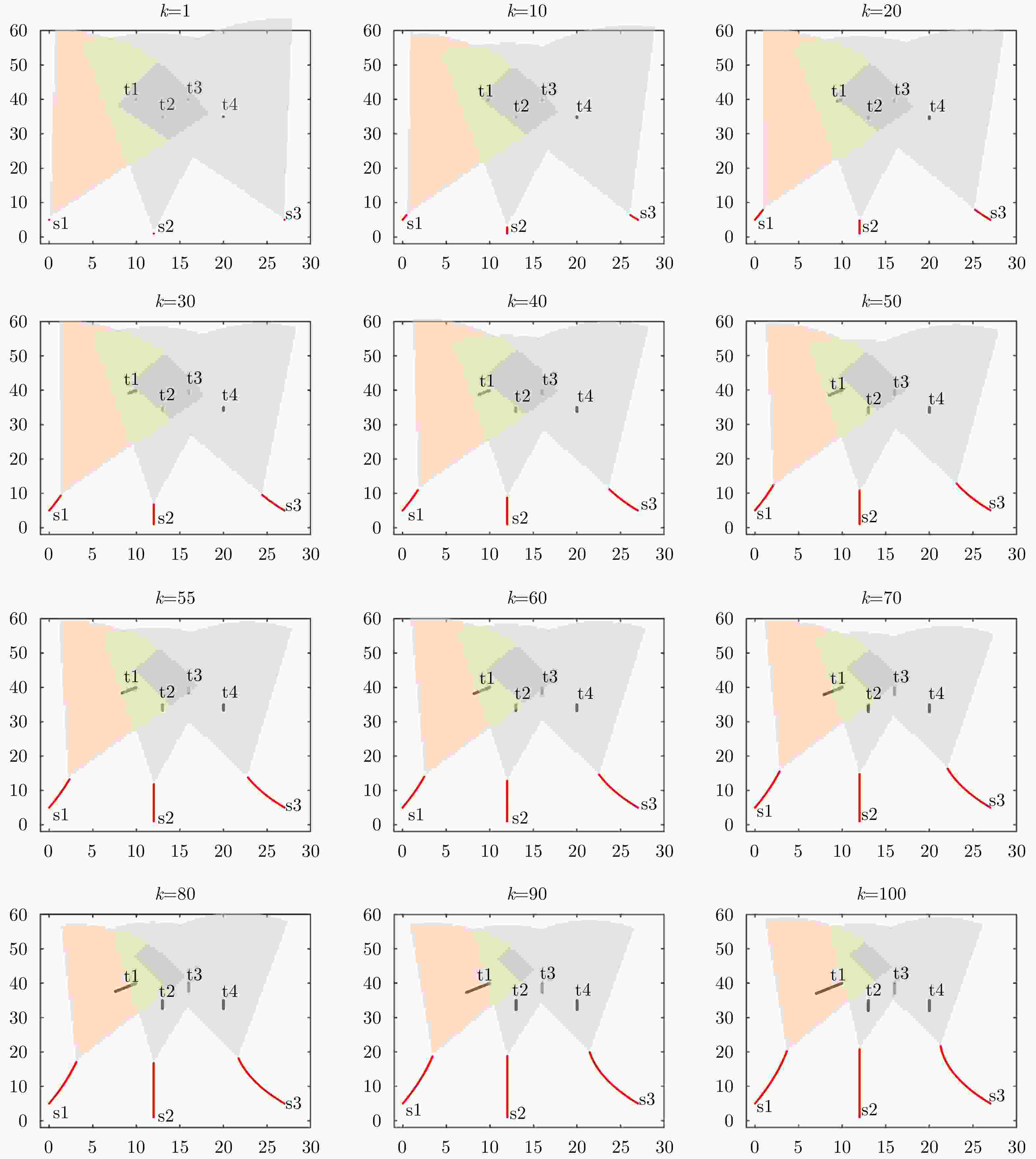
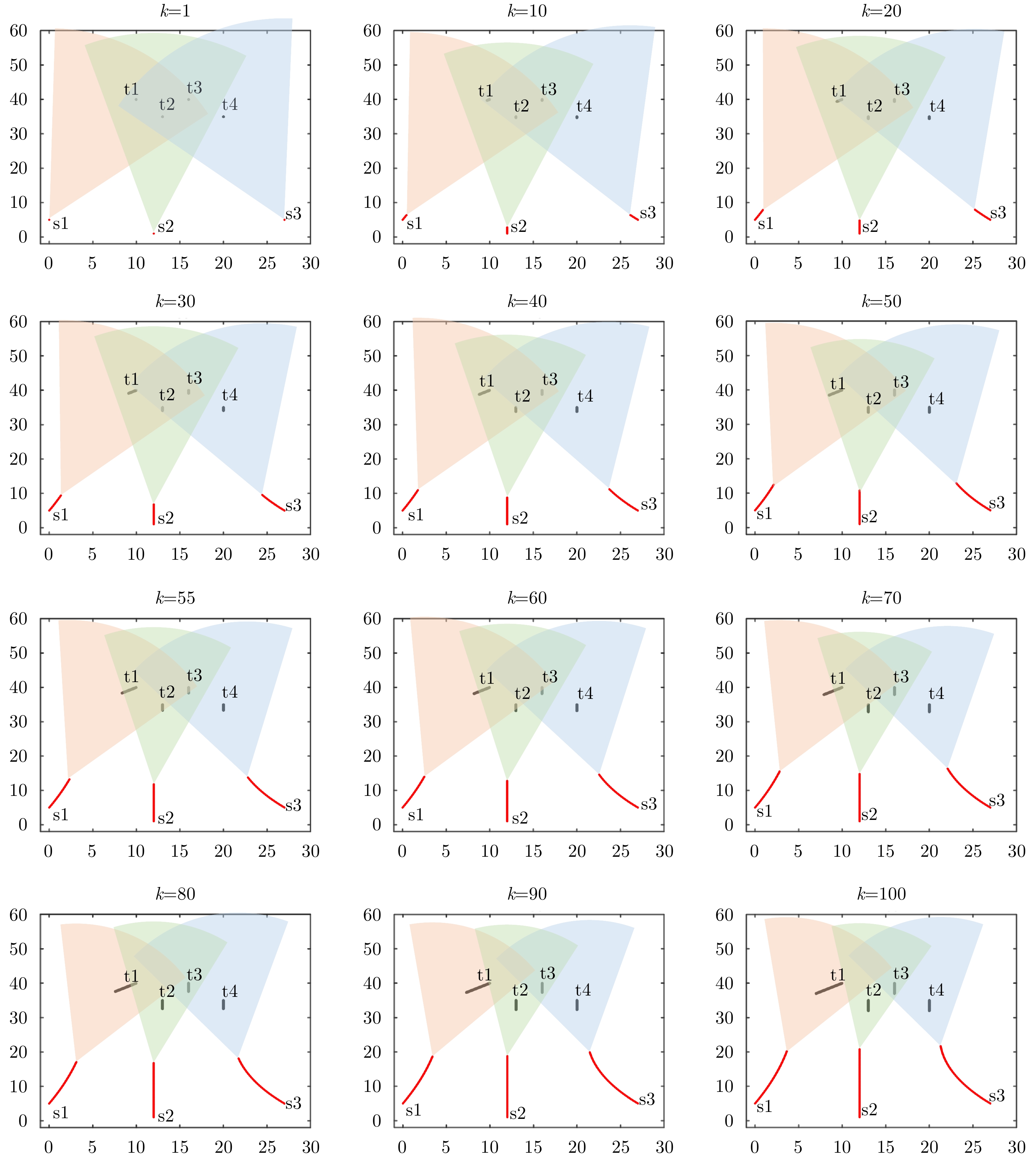
图 2 不同时刻的雷达视场示意图(s1—s3为雷达平台,t1—t4为目标,k表示不同时刻,坐标轴单位为km)
Figure 2. The illustration of the sensor field of views in different time(s1—s3 are radar platforms, t1—t4 are targets, k represents time index, and the unit of coordinate is km)
表 1 部分重叠视场下分布式雷达多目标跟踪算法
Table 1. Distributed multitarget tracking using radars with partially overlapping FoVs
算法1:部分重叠视场下分布式雷达多目标跟踪算法 (1) 雷达i和j执行GM-CPHD滤波器分别得到势分布${p_i}(n)$,
${p_j}(n)$和PHD ${D_i}({\boldsymbol{x}})$, ${D_j}({\boldsymbol{x}})$;(2) 计算多目标密度乘积(式(21)); (3) 修剪高斯混合形式乘积,得到
${D_{ij}}({\boldsymbol{x}}) = \left( {w_{ij}^{(l)},m_{ij}^{(l)},P_{ij}^{(l)}} \right)_{l = 1}^{{M_{ij}}}$ ;(4) 计算形成${D_{ij}}({\boldsymbol{x}})$所对应的${D_i}({\boldsymbol{x}})$和${D_j}({\boldsymbol{x}})$中的分量,分别为
${D_{i,I}}({\boldsymbol{x}})$和${D_{j,I}}({\boldsymbol{x}})$;(5) 对${D_{i,I}}({\boldsymbol{x}})$及${D_{j,I}}({\boldsymbol{x}})$的高斯权重进行如式(27)的处理; (6) 利用多伯努利近似计算切分势分布${p_{i,I}}(n)$及${p_{j,I}}(n)$(式(29)); (7) 计算切分PHD ${D_{i,O}}({\boldsymbol{x}})$和${D_{j,O}}({\boldsymbol{x}})$(式(25),式(26)); (8) 利用卷积性质计算剩余势分布${p_{i,O}}(n)$和${p_{j,O}}(n)$(式(31)); (9) 计算合并势分布$p(n)$及PHD $D({\boldsymbol{x}})$(式(32),式(33))。  下载: 导出CSV
下载: 导出CSV
-
[1] HE Shaoming, SHIN H S, XU Shuoyuan, et al. Distributed estimation over a low-cost sensor network: A review of state-of-the-art[J]. Information Fusion, 2020, 54: 21–43. doi: 10.1016/j.inffus.2019.06.026 [2] LIGGINS II M, HALL D, and LLINAS J. Handbook of Multisensor Data Fusion: Theory and Practice[M]. Boca Raton: CRC Press, 2017. [3] CHONG C Y, CHANG Kuochu, and MORI S. A review of forty years of distributed estimation[C]. 21st International Conference on Information Fusion, Cambridge, UK, 2018: 1–8. [4] CHEN X, THARMARASA R, and KIRUBARAJAN T. Multitarget Multisensor Tracking[M]. Academic Press Library in Signal Processing. Amsterdam: Elsevier, 2014: 759–812. [5] JAVADI S H and FARINA A. Radar networks: A review of features and challenges[J]. Information Fusion, 2020, 61: 48–55. doi: 10.1016/j.inffus.2020.03.005 [6] MAHLER R. PHD filters of higher order in target number[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523–1543. doi: 10.1109/TAES.2007.4441756 [7] MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Norwood, US: Artech House, 2007. [8] MAHLER R P S. Advances in Statistical Multisource-Multitarget Information Fusion[M]. Norwood, US: Artech House, 2014. [9] 杨威, 付耀文, 龙建乾, 等. 基于有限集统计学理论的目标跟踪技术研究综述[J]. 电子学报, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025YANG Wei, FU Yaowen, LONG Jianqian, et al. The FISST-based target tracking techniques: A survey[J]. Acta Electronica Sinica, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025 [10] 李天成, 范红旗, 孙树栋. 粒子滤波理论、方法及其在多目标跟踪中的应用[J]. 自动化学报, 2015, 41(12): 1981–2002. doi: 10.16383/j.aas.2015.c150426LI Tiancheng, FAN Hongqi, and SUN Shudong. Particle filtering: Theory, approach, and application for multitarget tracking[J]. Acta Automatica Sinica, 2015, 41(12): 1981–2002. doi: 10.16383/j.aas.2015.c150426 [11] WU Weihua, SUN Hemin, HUANG Zhiliang, et al. Multi-GMTI fusion for Doppler blind zone suppression using PHD fusion[J]. Signal Processing, 2021, 183: 108024. doi: 10.1016/j.sigpro.2021.108024 [12] WANG Xiaoying, GOSTAR A K, RATHNAYAKE T, et al. Centralized multiple-view sensor fusion using labeled multi-Bernoulli filters[J]. Signal Processing, 2018, 150: 75–84. [13] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119 [14] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822 [15] DA Kai, LI Tiancheng, ZHU Yongfeng, et al. Recent advances in multisensor multitarget tracking using random finite set[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22(1): 5–24. doi: 10.1631/FITEE.2000266 [16] BATTISTELLI G, CHISCI L, and LAURENZI A. Random set approach to distributed multivehicle SLAM[J]. IFAC-PapersOnLine, 2017, 50(1): 2457–2464. doi: 10.1016/j.ifacol.2017.08.410 [17] LI Suqi, BATTISTELLI G, CHISCI L, et al. Multi-sensor multi-object tracking with different fields-of-view using the LMB filter[C]. 21st International Conference on Information Fusion, Cambridge, UK, 2018: 1201–1208. [18] GAN J, VASIC M, and MARTINOLI A. Cooperative multiple dynamic object tracking on moving vehicles based on sequential Monte Carlo probability hypothesis density filter[C]. IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 2016: 2163–2170. [19] LI Tiancheng, ELVIRA V, FAN Hongqi, et al. Local-diffusion-based distributed SMC-PHD filtering using sensors with limited sensing range[J]. IEEE Sensors Journal, 2019, 19(4): 1580–1589. doi: 10.1109/JSEN.2018.2882084 [20] DA Kai, LI Tiancheng, ZHU Yongfeng, et al. Gaussian mixture particle jump-Markov-CPHD fusion for multitarget tracking using sensors with limited views[J]. IEEE Transactions on Signal and Information Processing over Networks, 2020, 6: 605–616. doi: 10.1109/TSIPN.2020.3016478 [21] VASIC M, MANSOLINO D, and MARTINOLI A. A system implementation and evaluation of a cooperative fusion and tracking algorithm based on a Gaussian Mixture PHD filter[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea (South), 2016: 4172–4179. [22] LI Guchong, BATTISTELLI G, CHISCI L, et al. Distributed multi-view multi-target tracking based on CPHD filtering[J]. Signal Processing, 2021, 188: 108210. doi: 10.1016/j.sigpro.2021.108210 [23] 吴孙勇, 王力, 李天成, 等. 基于分布式有限感知网络的多伯努利目标跟踪[J]. 自动化学报, 2022, 48(5): 1370–1384. doi: 10.16383/j.aas.c200481.WU Sunyong, WANG Li, LI Tiancheng, et al. Multi-Bernoulli target tracking based on distributed limited sensing network[J]. Acta Automatica Sinica, 2022, 48(5): 1370–1384. doi: 10.16383/j.aas.c200481. [24] LI Guchong, BATTISTELLI G, YI Wei, et al. Distributed multi-sensor multi-view fusion based on generalized covariance intersection[J]. Signal Processing, 2020, 166: 107246. doi: 10.1016/j.sigpro.2019.107246 [25] VAN NGUYEN H, REZATOFIGHI H, VO B N, et al. Distributed multi-object tracking under limited field of view sensors[J]. IEEE Transactions on Signal Processing, 2021, 69: 5329–5344. doi: 10.1109/TSP.2021.3103125 [26] YI Wei, LI Guchong, and BATTISTELLI G. Distributed multi-sensor fusion of PHD filters with different sensor fields of view[J]. IEEE Transactions on Signal Processing, 2020, 68: 5204–5218. doi: 10.1109/TSP.2020.3021834 [27] VO B T, VO B N, and CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553–3567. doi: 10.1109/TSP.2007.894241 [28] GAO Lin, BATTISTELLI G, and CHISCI L. Multiobject fusion with minimum information loss[J]. IEEE Signal Processing Letters, 2020, 27: 201–205. doi: 10.1109/LSP.2019.2963817 [29] 胡广书. 数字信号处理: 理论、算法与实现[M]. 2版. 北京: 清华大学出版社, 2003.HU Guangshu. Digital Signal Processing: Theory, Algorithm and Implementation[M]. Second edition. Beijing, Tsinghua University Press, 2003. [30] RISTIC B, CLARK D, VO B N, et al. Adaptive target birth intensity for PHD and CPHD filters[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1656–1668. doi: 10.1109/TAES.2012.6178085 [31] HOUSSINEAU J and LANEUVILLE D. PHD filter with diffuse spatial prior on the birth process with applications to GM-PHD filter[C]. 13th International Conference on Information Fusion, Edinburgh, UK, 2010: 1–8. [32] SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457. doi: 10.1109/TSP.2008.920469 -


图(3) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

