
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
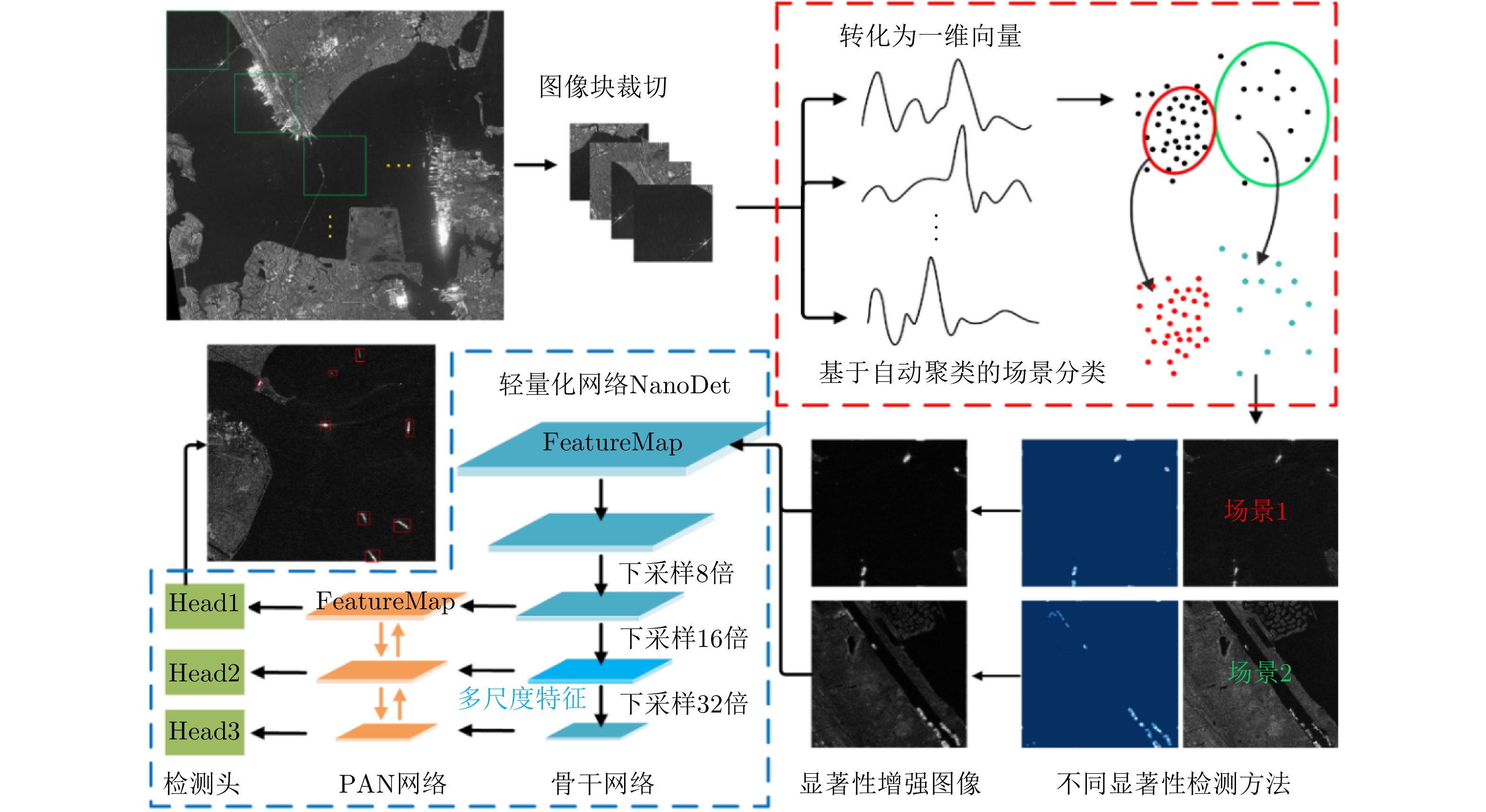
摘要: 在合成孔径雷达遥感图像中,舰船由金属材质构成,后向散射强;海面平滑,后向散射弱,因此舰船是海面背景下的视觉显著目标。然而,SAR遥感影像幅宽大、海面背景复杂,且不同舰船目标特征差异大,导致舰船快速准确检测困难。为此,该文提出一种基于视觉显著性的SAR遥感图像NanoDet舰船检测方法。该方法首先通过自动聚类算法划分图像样本为不同场景类别;其次,针对不同场景下的图像进行差异化的显著性检测;最后,使用优化后的轻量化网络模型NanoDet对加入显著性图的训练样本进行特征学习,使系统模型能够实现快速和高精确度的舰船检测效果。该方法对SAR图像应用实时性具有一定的帮助,且其轻量化模型利于未来实现硬件移植。该文利用公开数据集SSDD和AIR-SARship-2.0进行实验验证,体现了该算法的有效性。Abstract: In the Synthetic Aperture Radar (SAR) remote sensing image, ships are visually significant targets on the sea surface. Because they are made of metal, thus the backscatter is strong, while the sea surface is smooth and the backscatter is weak. However, the large-width SAR remote sensing image has a complicated sea background, and the features of various ship targets are quite different. To solve this problem, a SAR remote sensing image ship detection model called NanoDet is proposed. NanoDet is based on visual saliency. First, the image samples are divided into various scene categories using an automatic clustering algorithm. Second, differentiated saliency detection is performed for images in various scenes. Finally, the optimized lightweight network model, NanoDet, is used to perform feature learning on the training samples added with the saliency maps, so that the system model can achieve fast and high-precision ship detection effects. This method is helpful for the real-time application of SAR images. The lightweight model is conducive to hardware transplantation in the future.This study conducts experiments based on the public data set SSDD and AIR-SARship-2.0, and the experiments results verify the effectiveness of our approach.
-
Key words:
- SAR image /
- Ship detection /
- Deep learning /
- Lightweight network /
- Visual saliency
-
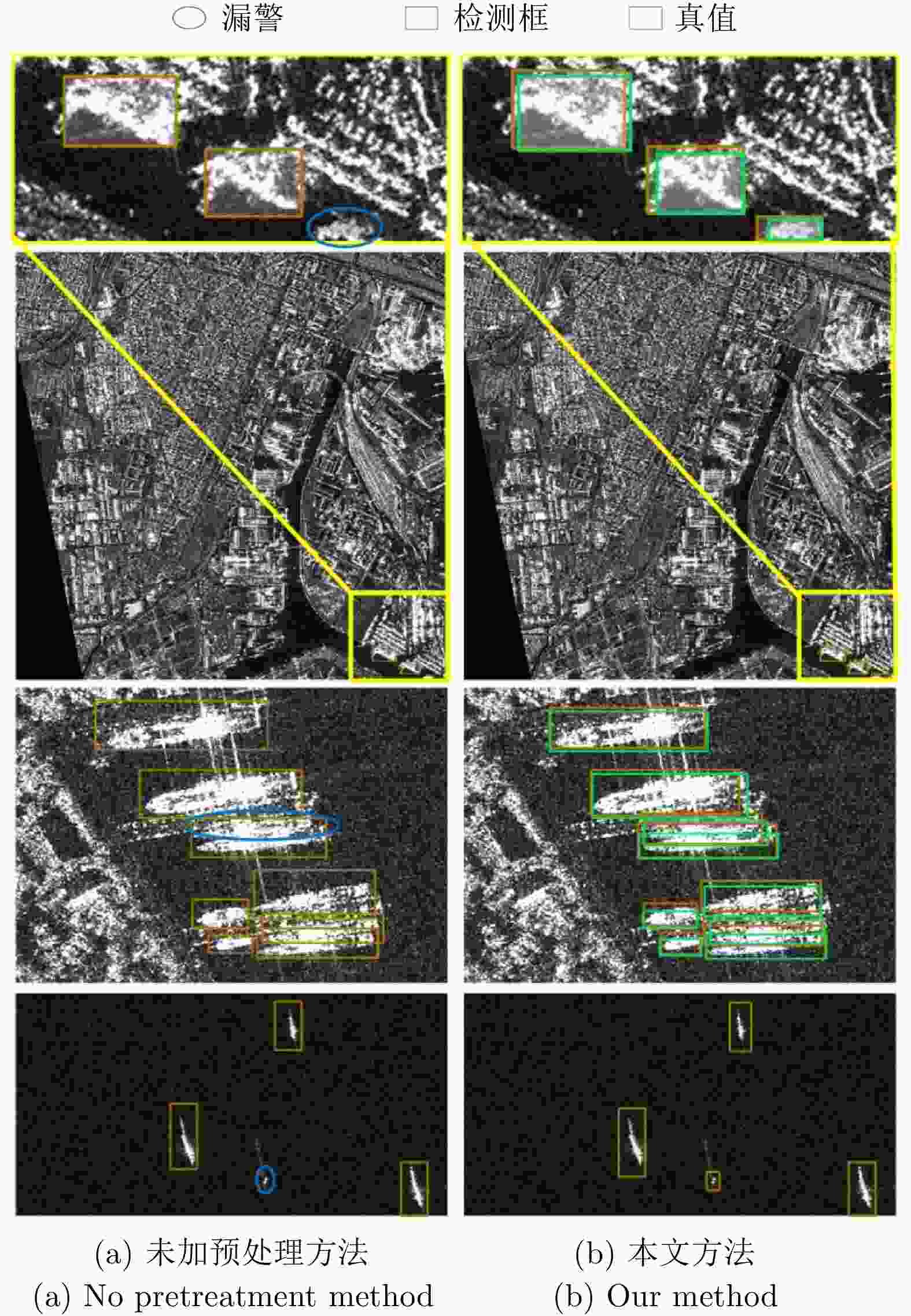
图 6 是否加入本文预处理方法检测结果对比图
Figure 6. The result diagram of the ship detection method with the preprocessing module added or not

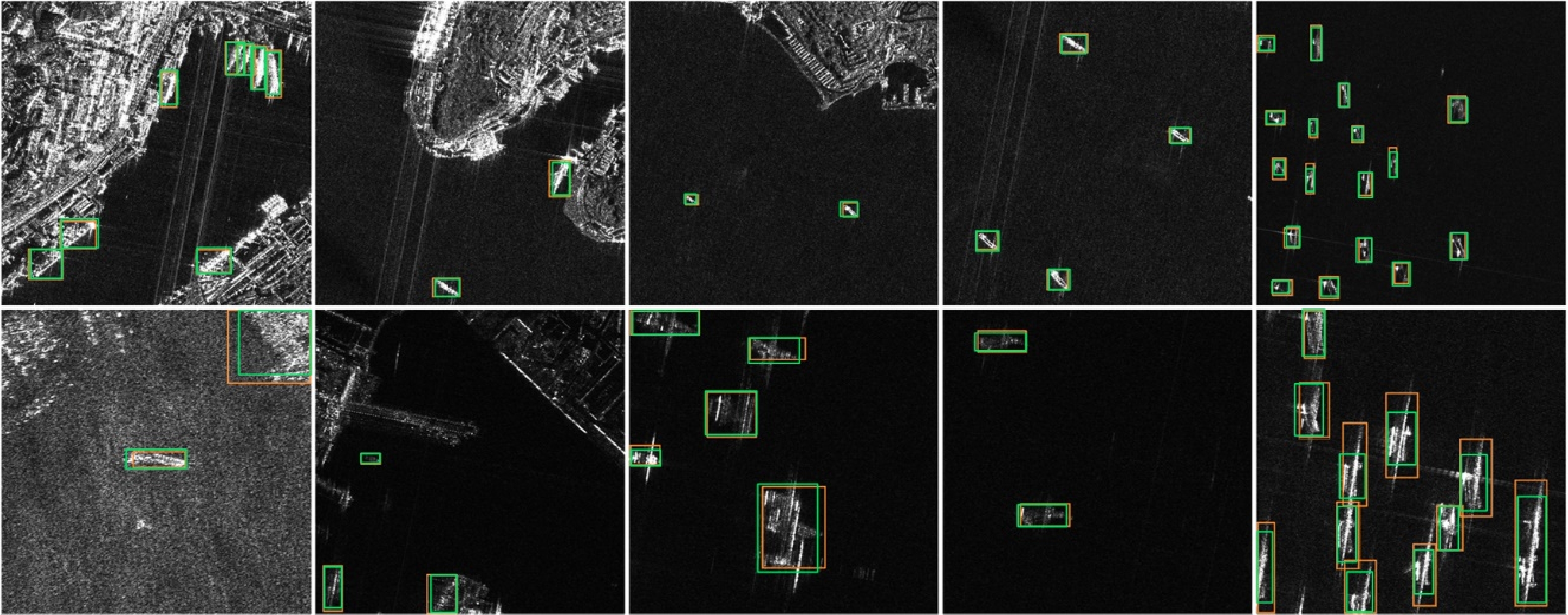
图 7 本文方法基于SSDD数据集的检测结果图
Figure 7. The ship inspection result diagram based on SSDD dataset of the method proposed in this paper
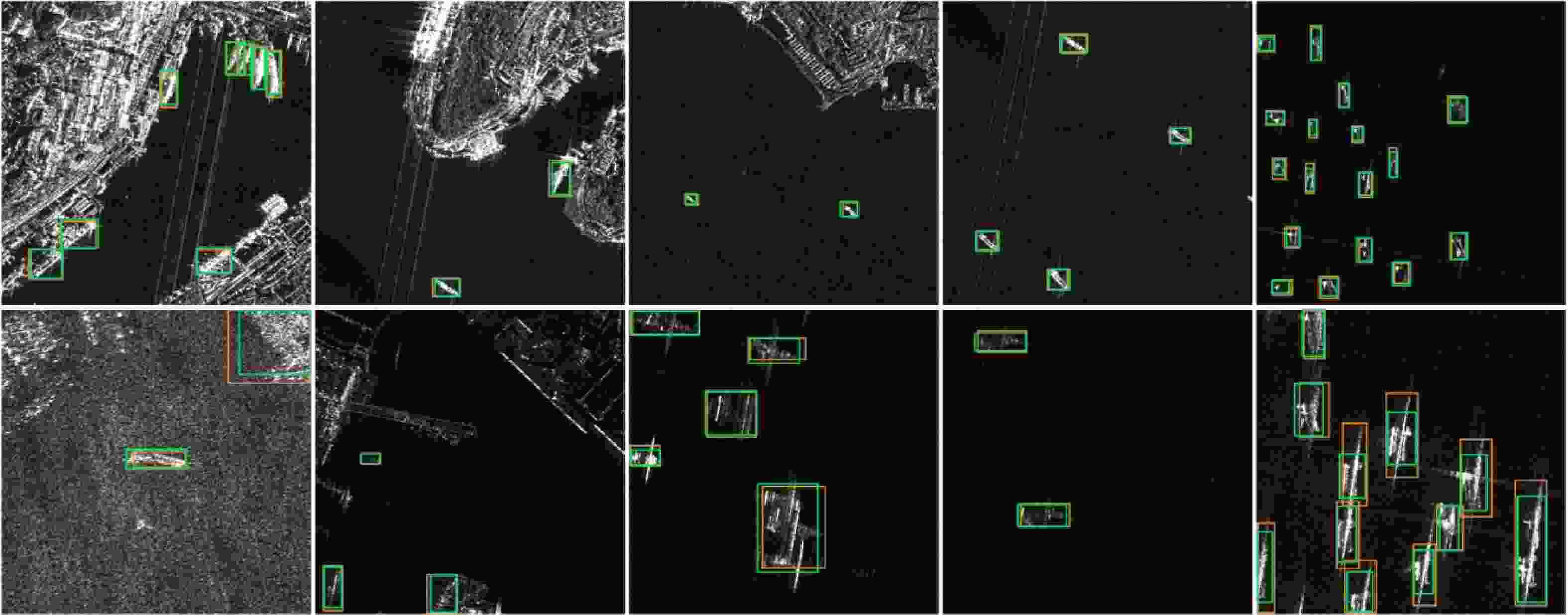
图 8 本文方法基于AIR-SARship数据集的检测结果图
Figure 8. The detection result diagram based on AIR-SARship dataset of our approach
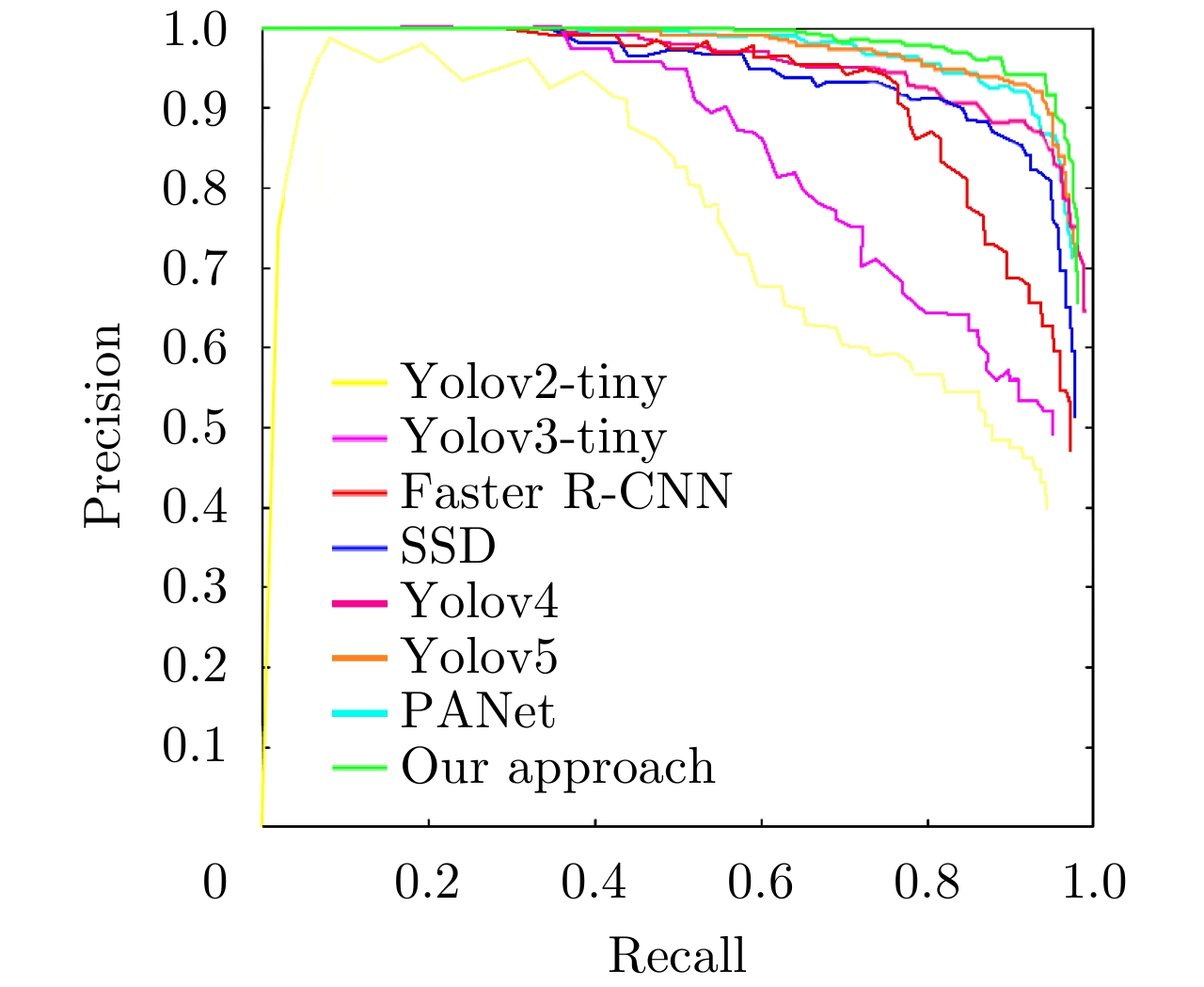
表 1 基于全部实验数据的不同方法检测性能对比
Table 1. Comparison of detection performance of different methods based on all dataset
方法 PD (%) PF (%) Precision (%) Recall (%) mAP (%) Time (ms) Yolov2-tiny 53.10 14.97 75.36 53.10 55.20 9.37 Yolov3-tiny 71.03 13.55 76.15 71.03 61.42 11.65 NanoDet 83.56 10.03 83.64 83.56 76.33 4.96 Faster R-CNN 84.98 9.62 82.37 84.98 74.94 313.55 SSD 94.36 7.96 85.83 92.36 82.52 53.98 Yolov4 94.98 4.66 89.34 93.98 88.62 120.34 Yolov5 95.12 5.43 94.68 95.12 90.56 37.52 PANet 93.22 4.52 94.96 93.22 90.77 183.68 未加预处理方法 92.65 5.53 86.71 92.65 85.89 5.39 本文方法 95.64 3.48 95.47 95.64 92.49 5.22  下载: 导出CSV
下载: 导出CSV
-
[1] MOREIRA A, PRATS-IRAOLA P, YOUNIS M, et al. A tutorial on synthetic aperture radar[J]. IEEE Geoscience and Remote Sensing Magazine, 2013, 1(1): 6–43. doi: 10.1109/MGRS.2013.2248301 [2] 郭倩, 王海鹏, 徐丰. SAR图像飞机目标检测识别进展[J]. 雷达学报, 2020, 9(3): 497–513. doi: 10.12000/JR20020GUO Qian, WANG Haipeng, and XU Feng. Research progress on aircraft detection and recognition in SAR imagery[J]. Journal of Radars, 2020, 9(3): 497–513. doi: 10.12000/JR20020 [3] 张杰, 张晰, 范陈清, 等. 极化SAR在海洋探测中的应用与探讨[J]. 雷达学报, 2016, 5(6): 596–606. doi: 10.12000/JR16124ZHANG jie, ZHANG Xi, FAN Chenqing, et al. Discussion on application of polarimetric synthetic aperture radar in marine surveillance[J]. Journal of Radars, 2016, 5(6): 596–606. doi: 10.12000/JR16124 [4] 牟效乾, 陈小龙, 关键, 等. 基于INet的雷达图像杂波抑制和目标检测方法[J]. 雷达学报, 2020, 9(4): 640–653. doi: 10.12000/JR20090MOU Xiaoqian, CHEN Xiaolong, GUAN Jian, et al. Clutter suppression and marine target detection for radar images based on INet[J]. Journal of Radars, 2020, 9(4): 640–653. doi: 10.12000/JR20090 [5] WACKERMAN C C, FRIEDMAN K S, PICHEL W G, et al. Automatic detection of ships in RADARSAT-1 SAR imagery[J]. Canadian Journal of Remote Sensing, 2001, 27(5): 568–577. doi: 10.1080/07038992.2001.10854896 [6] 陈慧元, 刘泽宇, 郭炜炜, 等. 基于级联卷积神经网络的大场景遥感图像舰船目标快速检测方法[J]. 雷达学报, 2019, 8(3): 413–424. doi: 10.12000/JR19041CHEN Huiyuan, LIU Zeyu, GUO Weiwei, et al. Fast detection of ship targets for large-scale remote sensing image based on a cascade convolutional neural network[J]. Journal of Radars, 2019, 8(3): 413–424. doi: 10.12000/JR19041 [7] AUDEBERT N, LE SAUX B, and LEFÈVRE S. How useful is region-based classification of remote sensing images in a deep learning framework?[C]. 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 2016: 5091–5094. doi: 10.1109/IGARSS.2016.7730327. [8] WANG Wenxiu, FU Yutian, DONG Feng, et al. Remote sensing ship detection technology based on DoG preprocessing and shape features[C]. The 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 2017: 1702–1706. doi: 10.1109/CompComm.2017.8322830. [9] HOU Xiaodi and ZHANG Liqing. Saliency detection: A spectral residual approach[C]. 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, USA, 2007: 1–8. doi: 10.1109/CVPR.2007.383267. [10] GOFERMAN S, ZELNIK-MANOR L, and TAL A. Context-aware saliency detection[C]. 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, USA, 2010: 2376–2383. doi: 10.1109/CVPR.2010.5539929. [11] LIU Zhi, ZOU Wenbin, and LE MEUR O. Saliency tree: A novel saliency detection framework[J]. IEEE Transactions on Image Processing, 2014, 23(5): 1937–1952. doi: 10.1109/TIP.2014.2307434 [12] CHENG Gong, ZHOU Peicheng, and HAN Junwei. Learning rotation-invariant convolutional neural networks for object detection in VHR optical remote sensing images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(12): 7405–7415. doi: 10.1109/TGRS.2016.2601622 [13] LIU Li, OUYANG Wanli, WANG Xiaogang, et al. Deep learning for generic object detection: A survey[J]. International Journal of Computer Vision, 2020, 128(2): 261–318. doi: 10.1007/s11263-019-01247-4 [14] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904–1916. doi: 10.1109/TPAMI.2015.2389824 [15] GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, USA, 2014: 580–587. [16] REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137–1149. doi: 10.1109/TPAMI.2016.2577031 [17] NIE Xuan, DUAN Mengyang, DING Haoxuan, et al. Attention mask R-CNN for ship detection and segmentation from remote sensing images[J]. IEEE Access, 2020, 8: 9325–9334. doi: 10.1109/ACCESS.2020.2964540 [18] LIU Shu, QI Lu, QIN Haifang, et al. Path aggregation network for instance segmentation[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 8759–8768. doi: 10.1109/CVPR.2018.00913. [19] LIU Yudong, WANG Yongtao, WANG Siwei, et al. Cbnet: A novel composite backbone network architecture for object detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 11653–11660. doi: 10.1609/aaai.v34i07.6834 [20] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time objectdetection[C]. The IEEE conference on computer vision and pattern recognition, Las Vegas, USA, 2016: 779–788. [21] LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single shot multibox detector[C]. The 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 2016: 21–37. doi: 10.1007/978-3-319-46448-0_2. [22] REDMON J and FARHADI A. YOLO9000: Better, faster, stronger[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6517–6525. doi: 10.1109/CVPR.2017.690. [23] REDMON J and FARHADI A. Yolov3: An incremental improvement[C]. arXiv: 1804.02767, 2018. [24] BOCHKOVSKIY A, WANG C Y, and LIAO H Y M. Yolov4: Optimal speed and accuracy of object detection[C]. arXiv: 2004.10934, 2020. [25] IANDOLA F N, HAN Song, MOSKEWICZ M W, et al. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size[C]. arXiv: 1602.07360, 2016. [26] MITTELMANN H and PENG Jiming. Estimating bounds for quadratic assignment problems associated with hamming and Manhattan distance matrices based on semidefinite programming[J]. SIAM Journal on Optimization, 2010, 20(6): 3408–3426. doi: 10.1137/090748834 [27] LI Yanghao, CHEN Yuntao, WANG Naiyan, et al. Scale-aware trident networks for object detection[C]. 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Korea (South), 2019: 6053–6062. [28] PASZKE A, GROSS S, MASSA F, et al. Pytorch: An imperative style, high-performance deep learning library[C]. The 33rd Conference on Neural Information Processing Systems, Vancouver, Canada, 2019: 8026–8037. [29] LI Jianwei, QU Changwen, and SHAO Jiaqi. Ship detection in SAR images based on an improved faster R-CNN[C]. 2017 SAR in Big Data Era: Models, Methods and Applications, Beijing, China, 2017: 1–6. doi: 10.1109/BIGSARDATA.2017.8124934. [30] 李健伟, 曲长文, 彭书娟. 基于级联CNN的SAR图像舰船目标检测算法[J]. 控制与决策, 2019, 34(10): 2191–2197. doi: 10.13195/j.kzyjc.2018.0168LI Jianwei, QU Changwen, and PENG Shujuan. A ship detection method based on cascade CNN in SAR images[J]. Control and Decision, 2019, 34(10): 2191–2197. doi: 10.13195/j.kzyjc.2018.0168 -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

