
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
SAR Tomography Imaging for Buildings Using an Inconsistency Criterion for Amplitude and Phase
-
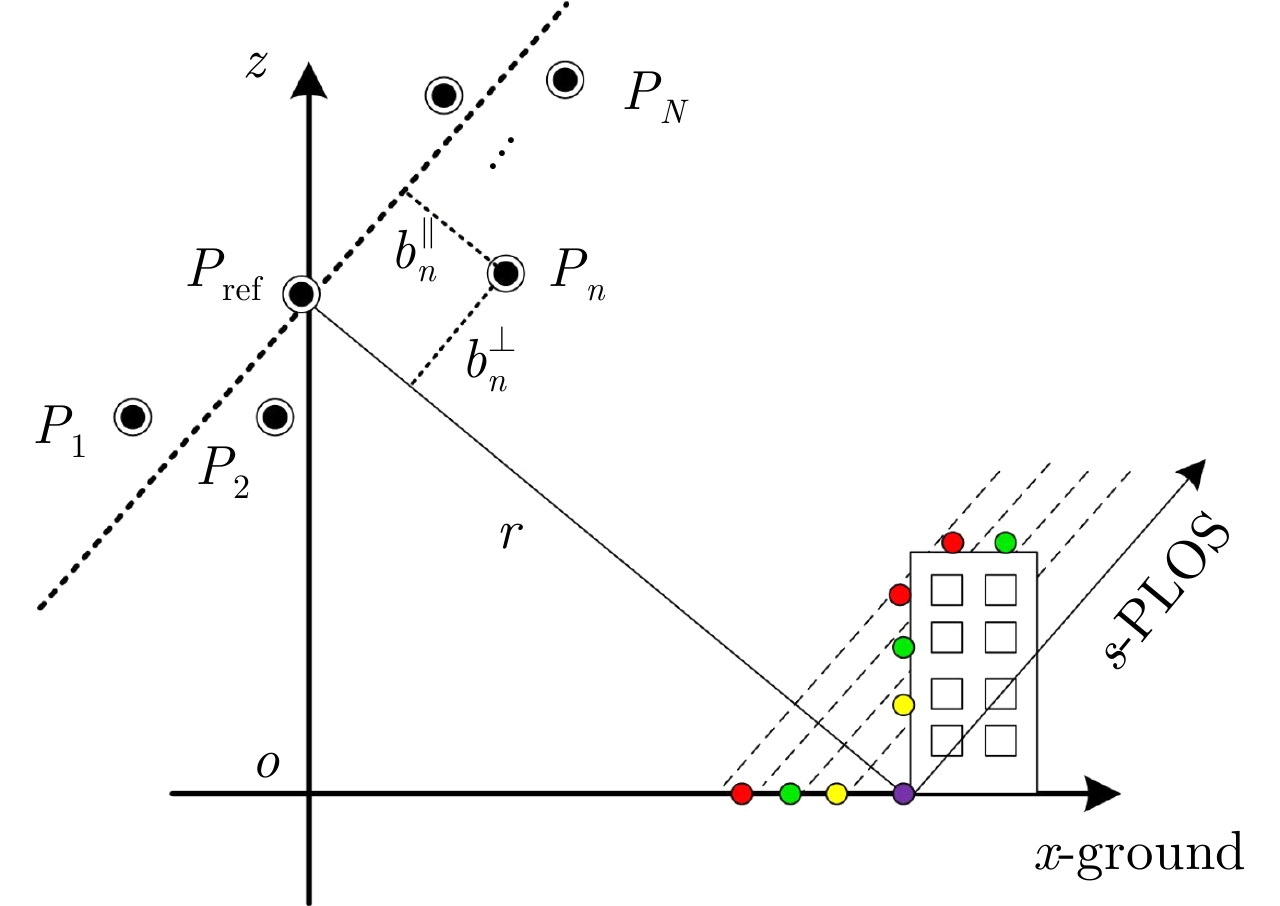
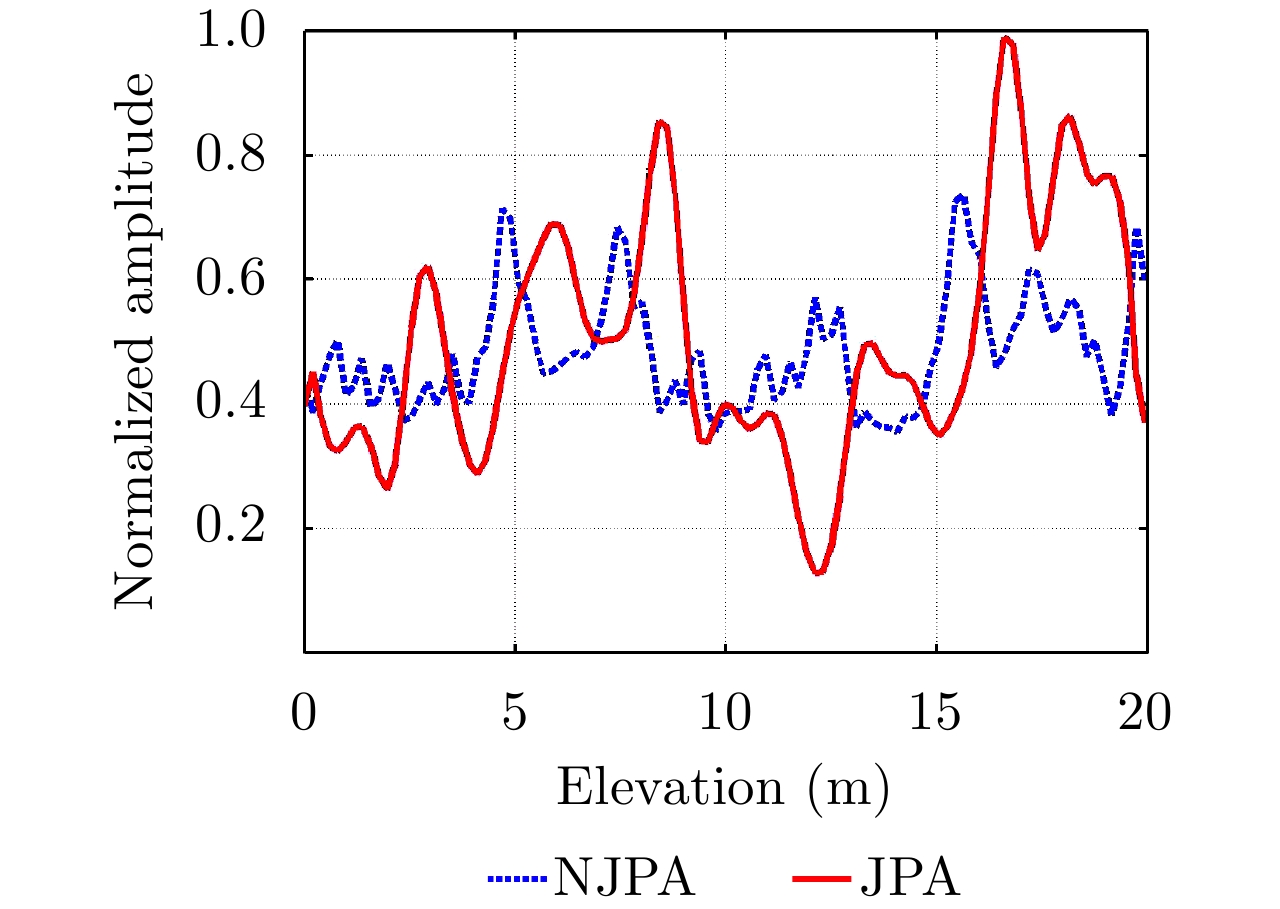
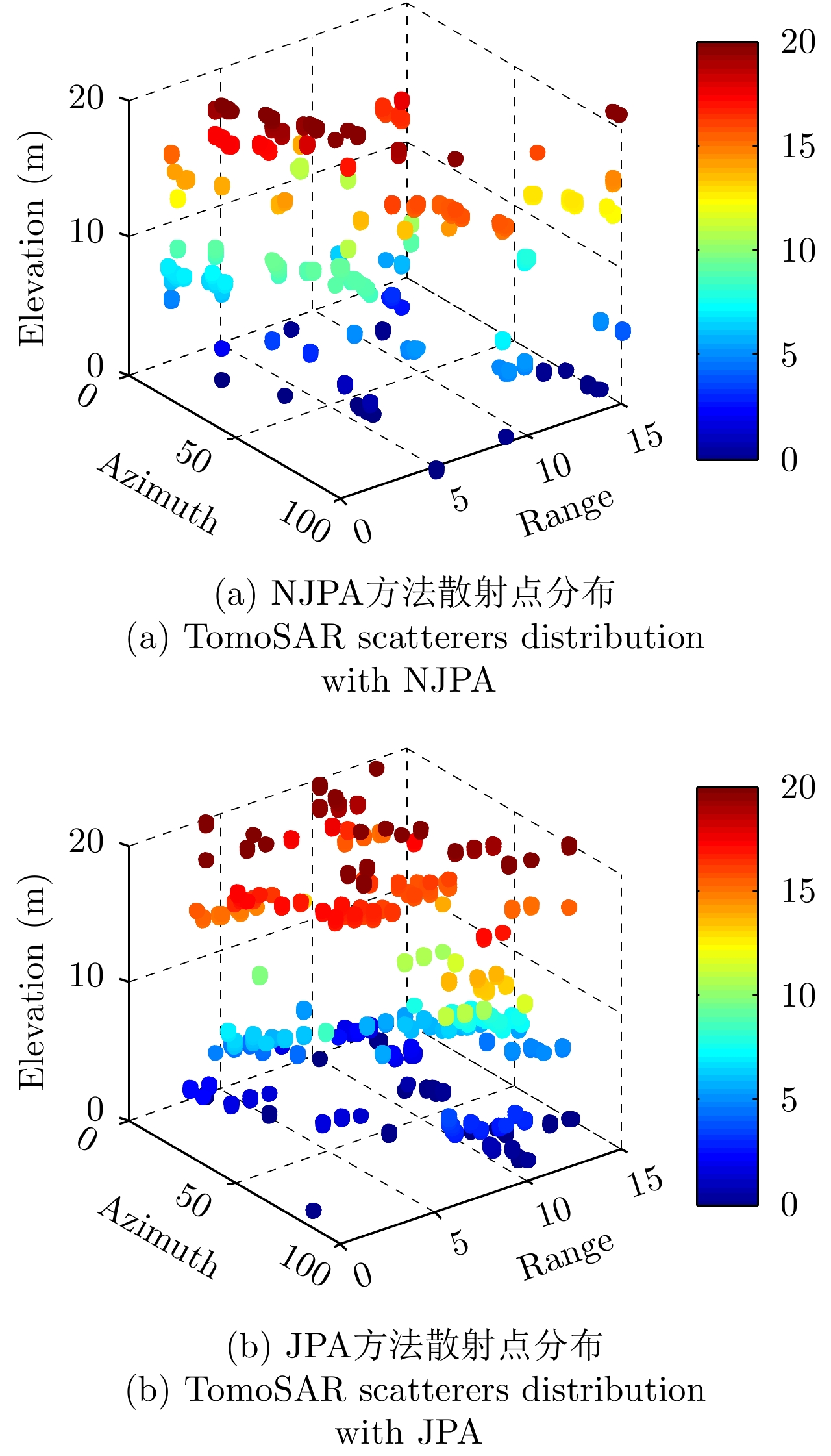
摘要: 传统的谱分析和压缩感知(CS)等层析合成孔径雷达(TomoSAR)成像技术由于解斜处理需要估计得到精确的垂直雷达视线(PLOS)方向的垂直有效基线。为了避免此操作该文采用沿PLOS向进行搜索的空域波束形成(BF)方法进行层析聚焦。由于高分辨率SAR图像中城区建筑物结构复杂,不同航过SAR图像间存在观测视角差异,并且存在相干斑噪声影响,SAR图像中的所有同源点不能在相同的像素点同时进行精确地配准。为了从幅度和相位两个方面找出BF聚焦时最相关的像素点,提出了一种联合参考像素窗口中邻域像素点的幅度和相位来提取目标像素点的不一致性准则。根据不一致性准则的最小化提取出相应的同名像素点,以实现对层析成像的精确聚焦。利用仿真数据和高分辨X波段重复航过机载SAR系统录取的实测数据进行实验。实验结果中,利用传统方法聚焦得到的散射轮廓峰值位置在15.63 m而该文所提方法得到峰值位置在16.88 m,峰值位置更加接近建筑实际高度18 m。表明该方法能有效提高散射体在PLOS方向的聚焦能量,并精确提取建筑物的3维轮廓。Abstract: An indispensable step in the imaging of Tomographic Synthetic Aperture Radar (TomoSAR) in spectral analysis or Compressive Sensing (CS) technology is estimating the perpendicular baselines in the Perpendicular Line Of Sight (PLOS) in deramping operations. To avoid this procedure, we introduce a Beam Forming (BF) method in the spatial domain that scans for TomoSAR focusing in the PLOS direction. Because of the sophisticated structure of buildings in urban areas, multipass high-resolution SAR images suffer from discrepancies in the look and incidence angles as well as speckle noise. As a result, it is challenging to precisely coregister all the homologous points in the identical pixels of multipass SAR images. To identify the most relevant pixels with respect to both amplitude and phase when BF imaging is implemented, we propose an inconsistency criterion for specific pixels using the joint phase and amplitude of pixels in a window. By minimizing the inconsistency criterion, homologous points with high accuracy can be identified by focusing on TomoSAR imaging. We used simulation and real data from a multipass X-band airborne TomoSAR system in China to test the effectiveness of the proposed method. Experimental results show that the peak of the reflectivity profile via conventional tomographic imaging is about 15.63 m, whereas that by the proposed method is 16.88 m, which is very close to the actual height of the 18 m building. The results demonstrate the feasibility of improving the focusing power of scatterers in the PLOS direction and extracting the three-dimensional outliers of buildings.
-
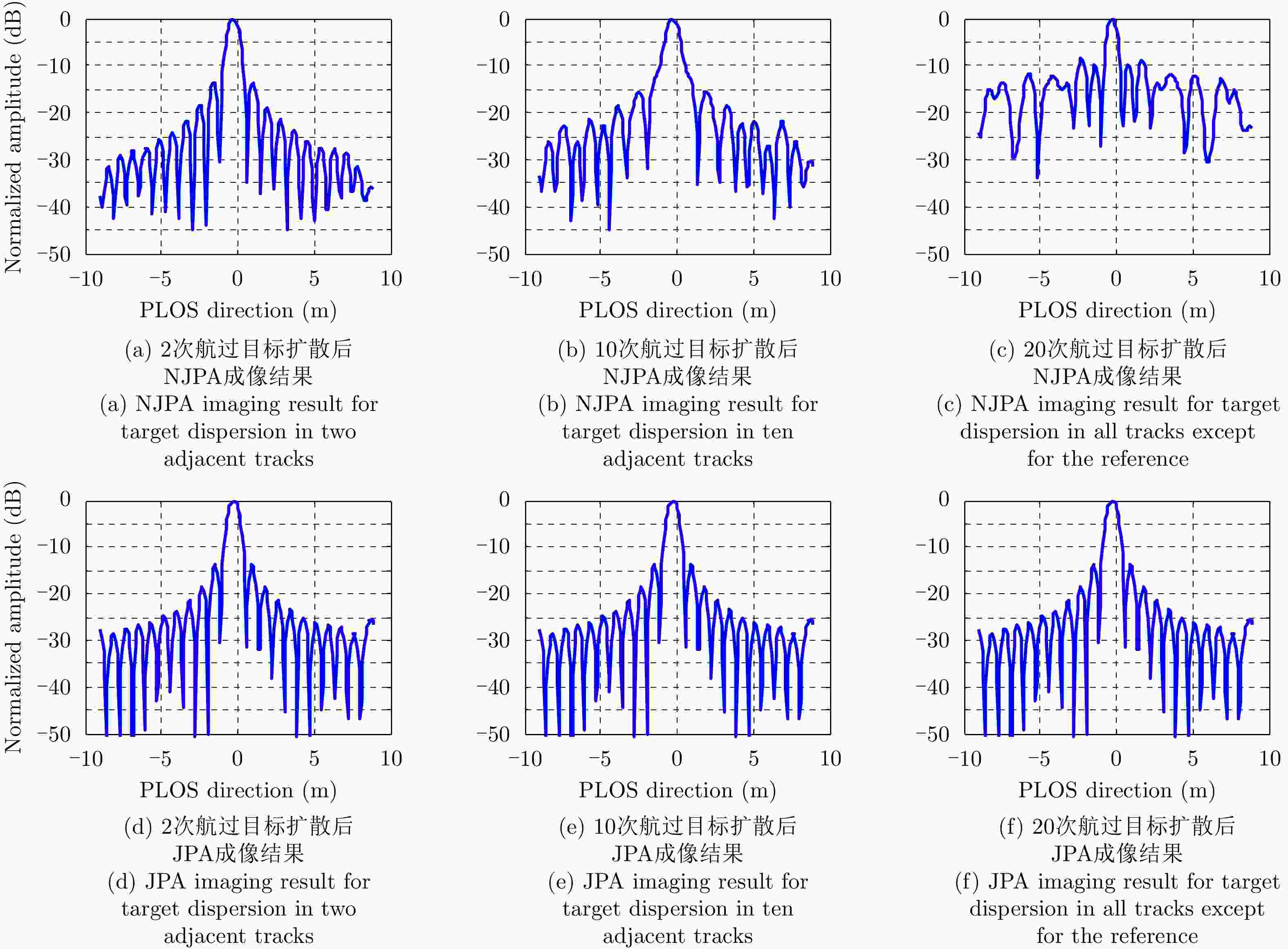
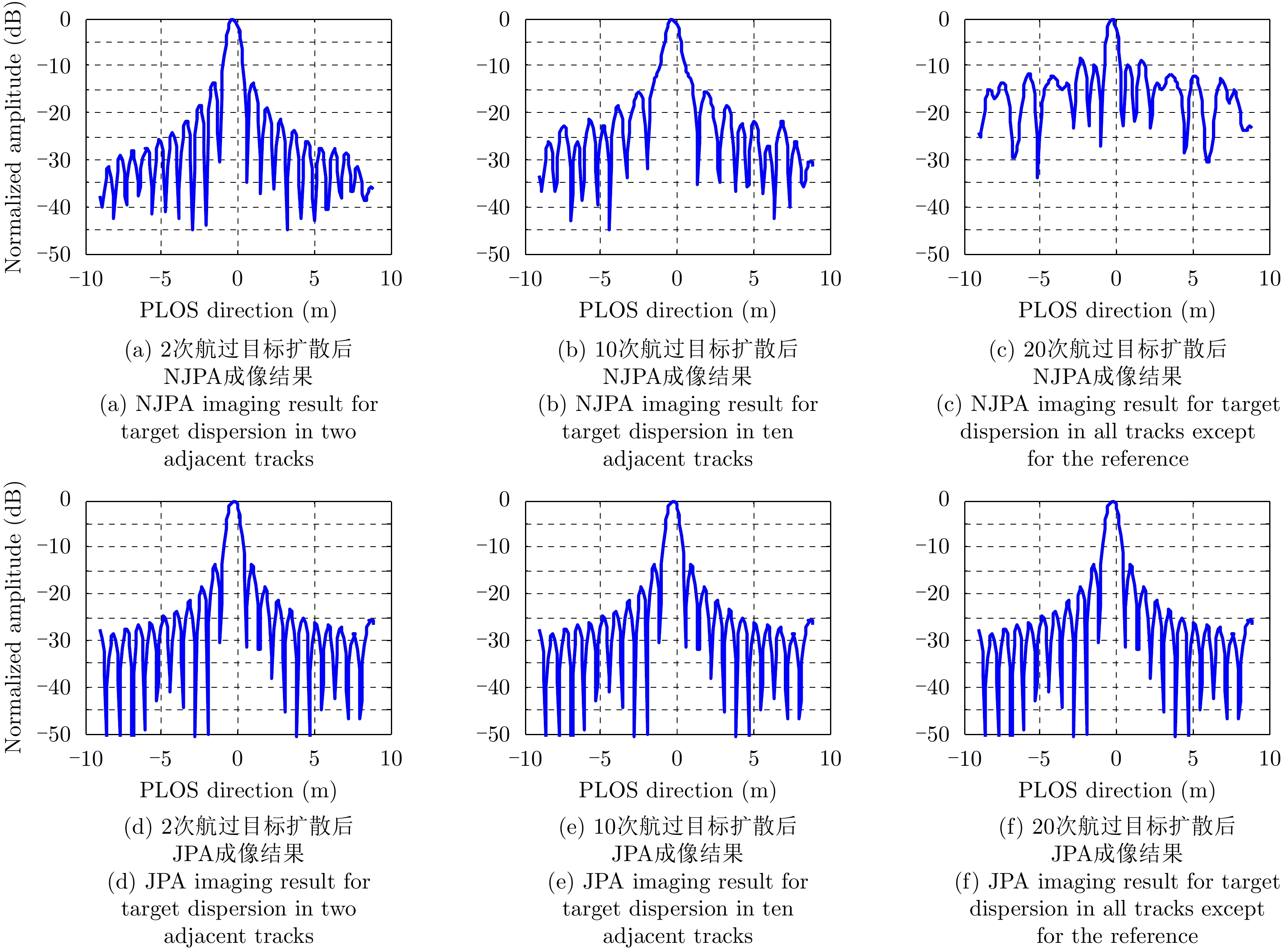
图 5 情形1中3种航迹分布下不同成像方法对比
Figure 5. Comparison between different TomoSAR imaging for three tracks distributions under circumstance one
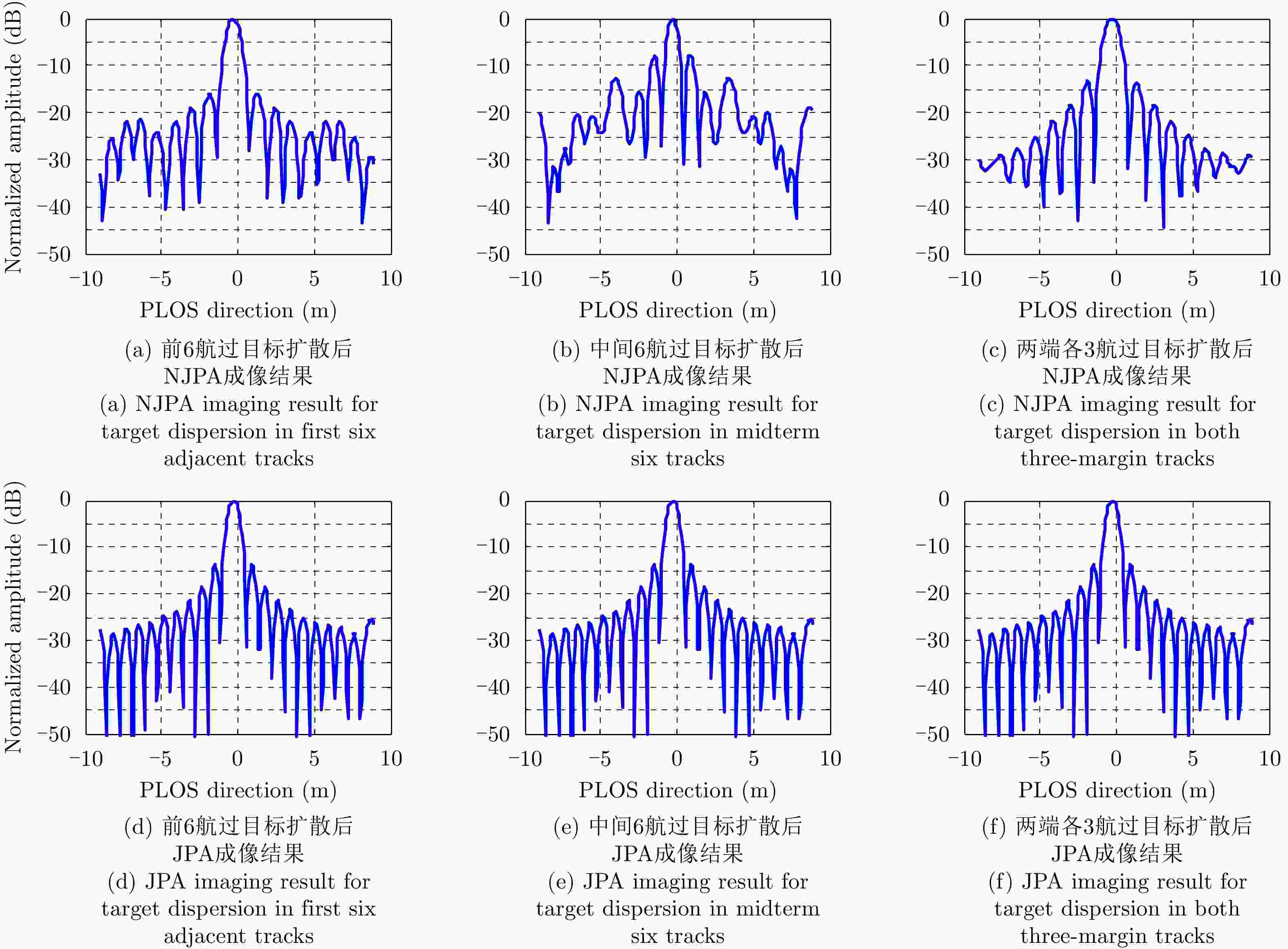
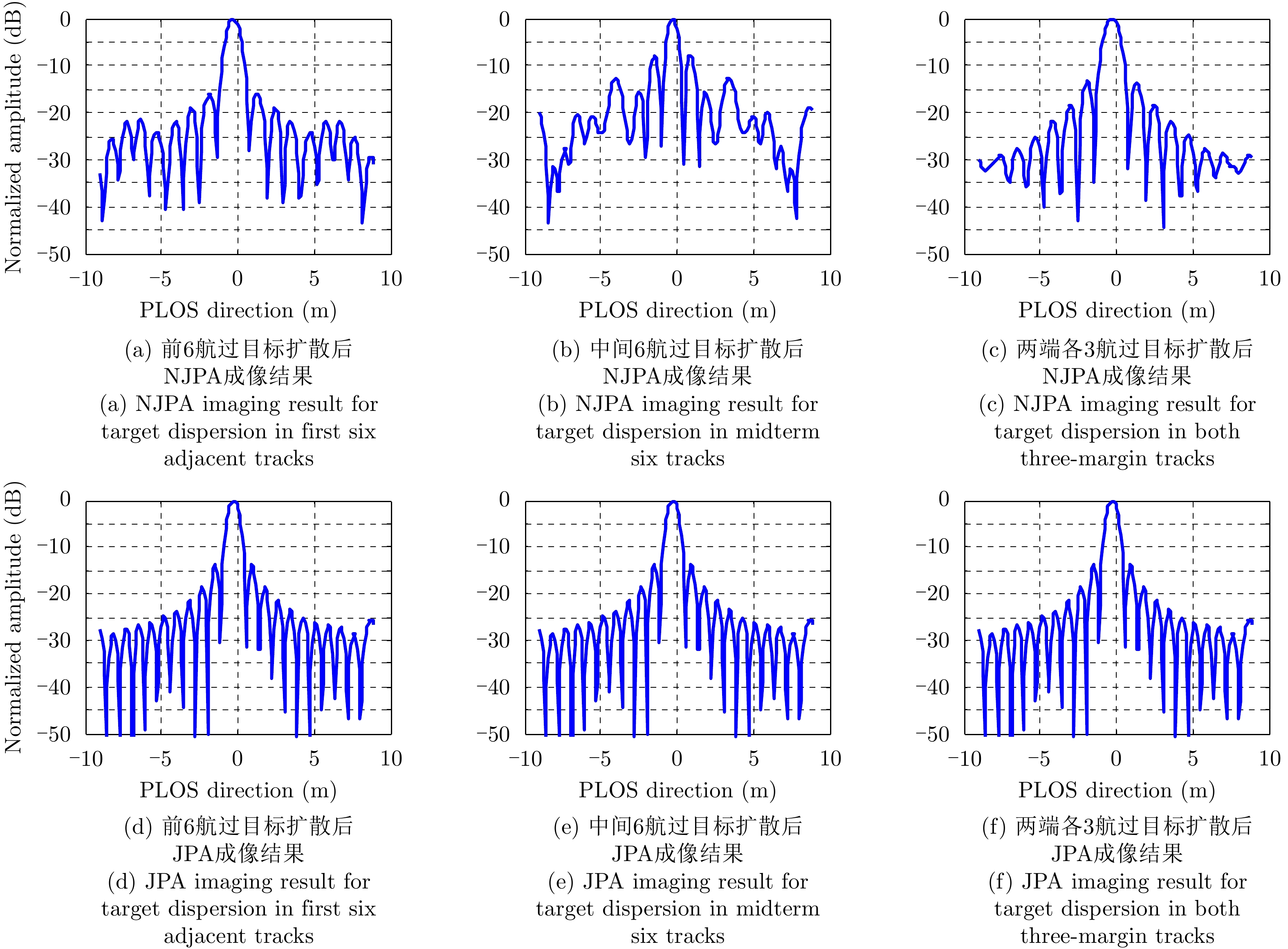
图 6 情形2中3种航迹分布下不同成像方法对比
Figure 6. Comparison between different TomoSAR imaging for three tracks distributions under circumstance two
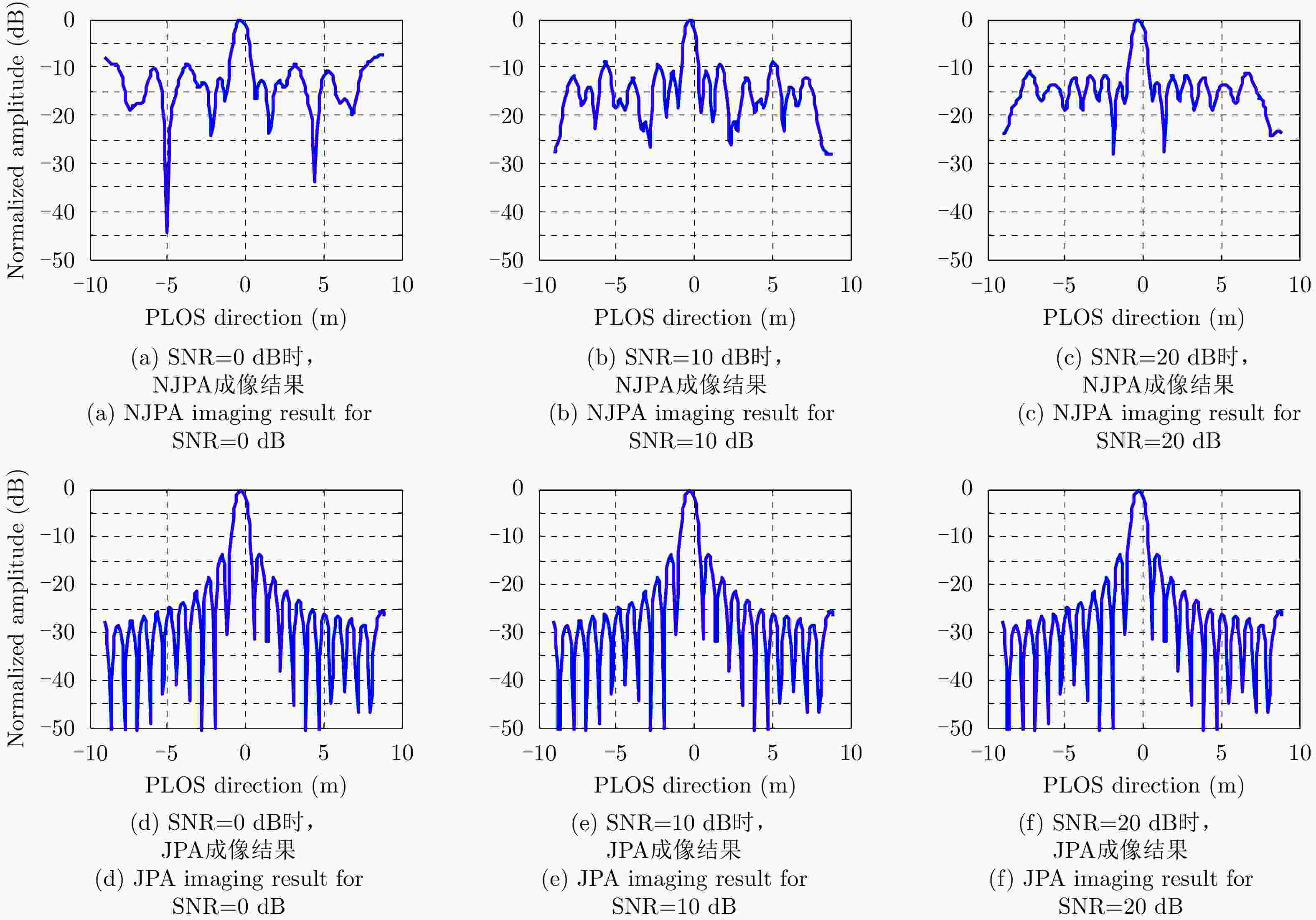
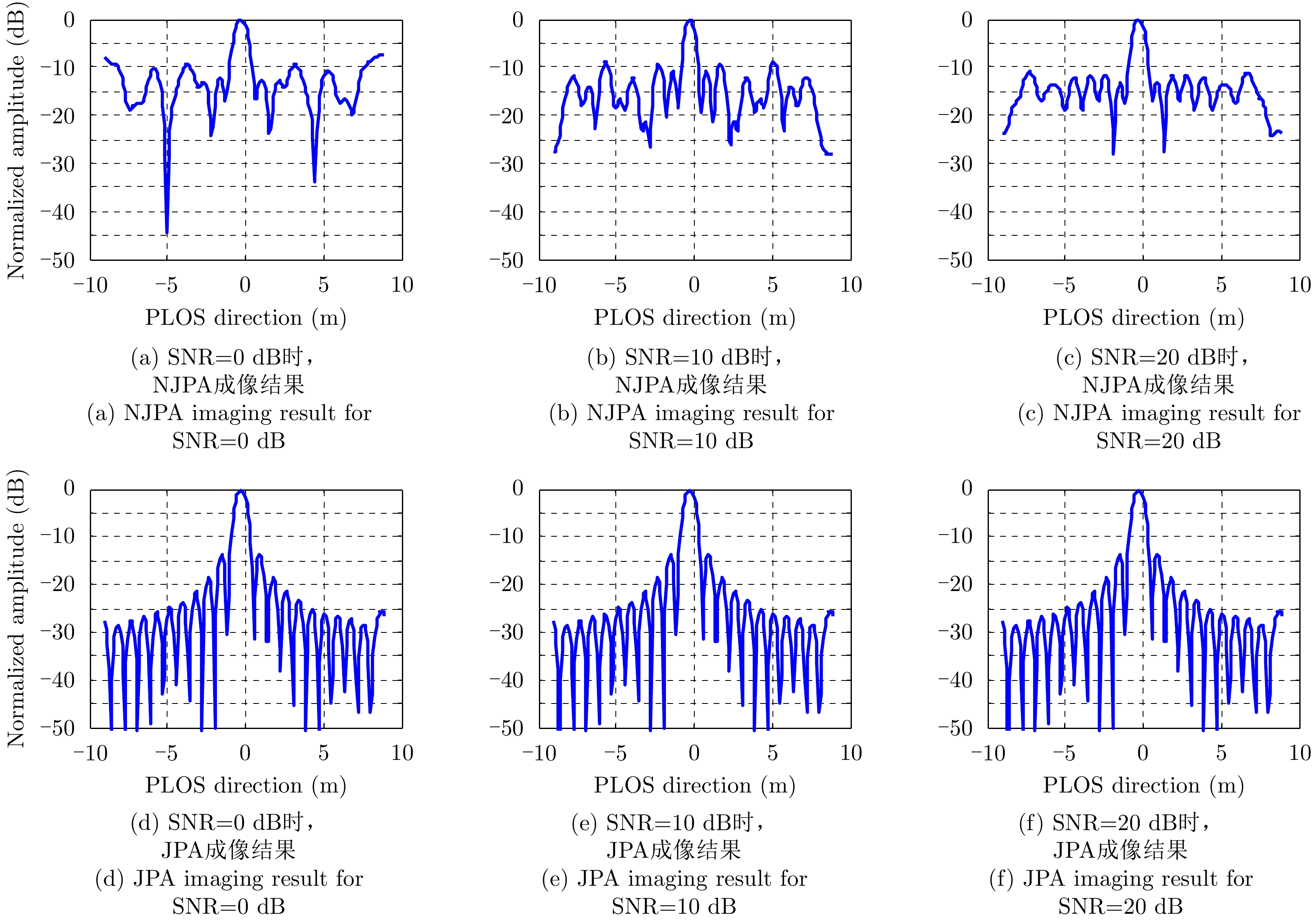
图 7 情形3中不同信噪比下不同成像方法对比
Figure 7. Comparison between different TomoSAR imaging for different SNR under circumstance three
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 参数 数值 中心频率(GHz) 10 雷达下视角(°) 45 带宽(MHz) 150 脉冲重复频率(Hz) 500 采样频率(MHz) 200 航过数 21 参考航过高度(m) 6000 基线间隔(m) 7.07 平台速度(m/s) 150 基线倾角(°) 45  下载: 导出CSV
下载: 导出CSV
表 2 X波段机载实测数据参数
Table 2. Parameters of the X-band airborne SAR sensor
参数 数值 参数 数值 航过数(次) 7 距离分辨率(m) 0.5 载频(GHz) 9.6 层析向孔径/(m) 54.62 入射角(°) 49 参考斜距(km) 10.65 方位分辨率(m) 0.5 层析向分辨率(m) 3.05
下载: 导出CSV
-
[1] REIGBER A and MOREIRA A. First demonstration of airborne SAR tomography using multibaseline L-band data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2142–2152. doi: 10.1109/36.868873 [2] 洪文, 王彦平, 林赟, 等. 新体制SAR三维成像技术研究进展[J]. 雷达学报, 2018, 7(6): 633–654. doi: 10.12000/JR18109HONG Wen, WANG Yanping, LIN Yun, et al. Research progress on three-dimensional SAR imaging techniques[J]. Journal of Radars, 2018, 7(6): 633–654. doi: 10.12000/JR18109 [3] 廖明生, 魏恋欢, 汪紫芸, 等. 压缩感知在城区高分辨率SAR层析成像中的应用[J]. 雷达学报, 2015, 4(2): 123–129. doi: 10.12000/JR15031LIAO Mingsheng, WEI Lianhuan, WANG Ziyun, et al. Compressive sensing in high-resolution 3D SAR tomography of urban scenarios[J]. Journal of Radars, 2015, 4(2): 123–129. doi: 10.12000/JR15031 [4] 赵克祥, 毕辉, 张冰尘. 基于快速阈值迭代的SAR层析成像处理方法[J]. 系统工程与电子技术, 2017, 39(5): 1019–1023. doi: 10.3969/j.issn.1001-506X.2017.05.11ZHAO Kexiang, BI Hui, and ZHANG Bingchen. SAR tomography method based on fast iterative shrinkage-thresholding[J]. Systems Engineering and Electronics, 2017, 39(5): 1019–1023. doi: 10.3969/j.issn.1001-506X.2017.05.11 [5] 李烈辰, 李道京. 基于压缩感知的连续场景稀疏阵列SAR三维成像[J]. 电子与信息学报, 2014, 36(9): 2166–2172. doi: 10.3724/SP.J.1146.2013.01645LI Liechen and LI Daojing. Sparse array SAR 3D imaging for continuous scene based on compressed sensing[J]. Journal of Electronics &Information Technology, 2014, 36(9): 2166–2172. doi: 10.3724/SP.J.1146.2013.01645 [6] 李烈辰, 李道京, 张清娟. 基于压缩感知的三孔径毫米波合成孔径雷达侧视三维成像[J]. 电子与信息学报, 2013, 35(3): 552–558. doi: 10.3724/SP.J.1146.2012.01016LI Liechen, LI Daojing, and ZHANG Qingjuan. Three-aperture millimeter-wave SAR side-looking three-dimensional imaging based on compressed sensing[J]. Journal of Electronics &Information Technology, 2013, 35(3): 552–558. doi: 10.3724/SP.J.1146.2012.01016 [7] 魏恋欢, 廖明生, BALZ T, 等. 高分辨率SAR层析成像建筑物叠掩散射体提取[J]. 武汉大学学报: 信息科学版, 2014, 39(5): 536–540. doi: 10.13203/j.whugis20120460WEI Lianhuan, LIAO Mingsheng, BALZ T, et al. Layover building scatterers extraction via high-resolution spaceborne SAR tomography[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 536–540. doi: 10.13203/j.whugis20120460 [8] BUDILLON A, JOHNSY A C, and SCHIRINZI G. A fast support detector for superresolution localization of multiple scatterers in SAR tomography[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(6): 2768–2779. doi: 10.1109/JSTARS.2017.2657227 [9] SAUER S, FERRO-FAMIL L, REIGBER A, et al. Three-dimensional imaging and scattering mechanism estimation over urban scenes using dual-baseline polarimetric InSAR observations at L-band[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(11): 4616–4629. doi: 10.1109/TGRS.2011.2147321 [10] TEBALDINI S and GUARNIERI A M. On the role of phase stability in SAR multibaseline applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(7): 2953–2966. doi: 10.1109/tgrs.2010.2043738 [11] LOMBARDINI F and REIGBER A. Adaptive spectral estimation for multibaseline SAR tomography with airborne L-band data[C]. Proceedings of 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 2003: 2014–2016. doi: 10.1109/IGARSS.2003.1294324. [12] GUILLASO S and REIGBER A. Polarimetric SAR tomography[C]. Proceedings of the 2nd International Workshop POLINSAR 2005, Frascati, Italy, 2005. [13] GINI F and LOMBARDINI F. Multibaseline cross-track SAR interferometry: A signal processing perspective[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 71–93. doi: 10.1109/maes.2005.1499278 [14] LOMBARDINI F, MONTANARI M, and GINI F. Reflectivity estimation for multibaseline interferometric radar imaging of layover extended sources[J]. IEEE Transactions on Signal Processing, 2003, 51(6): 1508–1519. doi: 10.1109/tsp.2003.811239 [15] FORNARO G, SERAFINO F, and SOLDOVIERI F. Three-dimensional focusing with multipass SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(3): 507–517. doi: 10.1109/TGRS.2003.809934 [16] 闵锐, 杨倩倩, 皮亦鸣, 等. 基于正则化正交匹配追踪的SAR层析成像[J]. 电子测量与仪器学报, 2012, 26(12): 1069–1073. doi: 10.3724/SP.J.1187.2012.01069MIN Rui, YANG Qianqian, PI Yiming, et al. SAR tomography imaging based on regularized orthogonal matching pursuit[J]. Journal of Electronic Measurement and Instrument, 2012, 26(12): 1069–1073. doi: 10.3724/SP.J.1187.2012.01069 [17] ZHU Xiaoxiang and BAMLER R. Very high resolution spaceborne SAR tomography in urban environment[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(12): 4296–4308. doi: 10.1109/tgrs.2010.2050487 [18] WEI Lianhuan, BALZ T, ZHANG Lu, et al. A novel fast approach for SAR tomography: Two-step iterative shrinkage/thresholding[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(6): 1377–1381. doi: 10.1109/lgrs.2015.2402124 [19] BANDA F, DALL J, and TEBALDINI S. Single and multipolarimetric P-band SAR tomography of subsurface ice structure[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(5): 2832–2845. doi: 10.1109/TGRS.2015.2506399 [20] XING Shiqi, LI Yongzhen, DAI Dahai, et al. Three-dimensional reconstruction of man-made objects using polarimetric tomographic SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(6): 3694–3705. doi: 10.1109/TGRS.2012.2220145 [21] 任笑真, 杨汝良. 一种基于幅度和相位迭代重建的四维合成孔径雷达成像方法[J]. 雷达学报, 2016, 5(1): 65–71. doi: 10.12000/JR15135REN Xiaozhen and YANG Ruliang. Four-dimensional SAR imaging algorithm based on iterative reconstruction of magnitude and phase[J]. Journal of Radars, 2016, 5(1): 65–71. doi: 10.12000/JR15135 [22] SCHMITT M and STILLA U. Maximum-likelihood-based approach for single-pass synthetic aperture radar tomography over urban areas[J]. IET Radar, Sonar & Navigation, 2014, 8(9): 1145–1153. doi: 10.1049/iet-rsn.2013.0378 [23] 梅振国. 灰色绝对关联度及其计算方法[J]. 系统工程, 1992, 10(5): 43–44, 72. doi: 10.3321/j.issn:1001-506X.1992.05.009MEI Zhen’guo. The concept and computation method of grey absolute correlation degree[J]. Systems Engineering, 1992, 10(5): 43–44, 72. doi: 10.3321/j.issn:1001-506X.1992.05.009 [24] 孙希龙. SAR层析与差分层析成像技术研究[D]. [博士论文], 国防科学技术大学, 2012: 57–74.SUN Xilong. Research on SAR tomography and differential SAR tomography imaging technology[D]. [Ph.D. dissertation], National University of Defense Technology, 2012: 57–74. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

