
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Two-dimensional Mixed Baseline Method Based on MIMO-SAR for Countering Deceptive Jamming
-
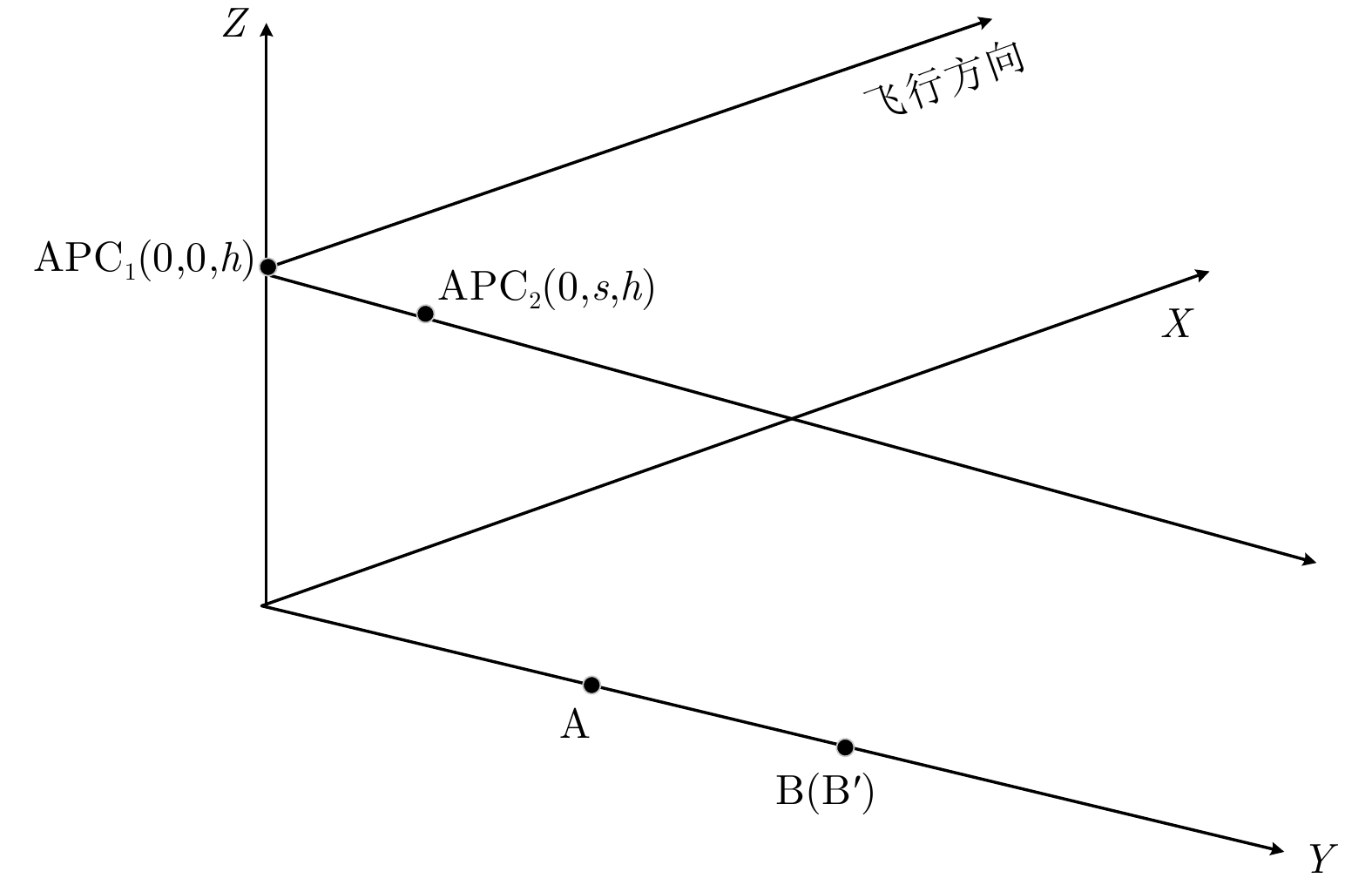
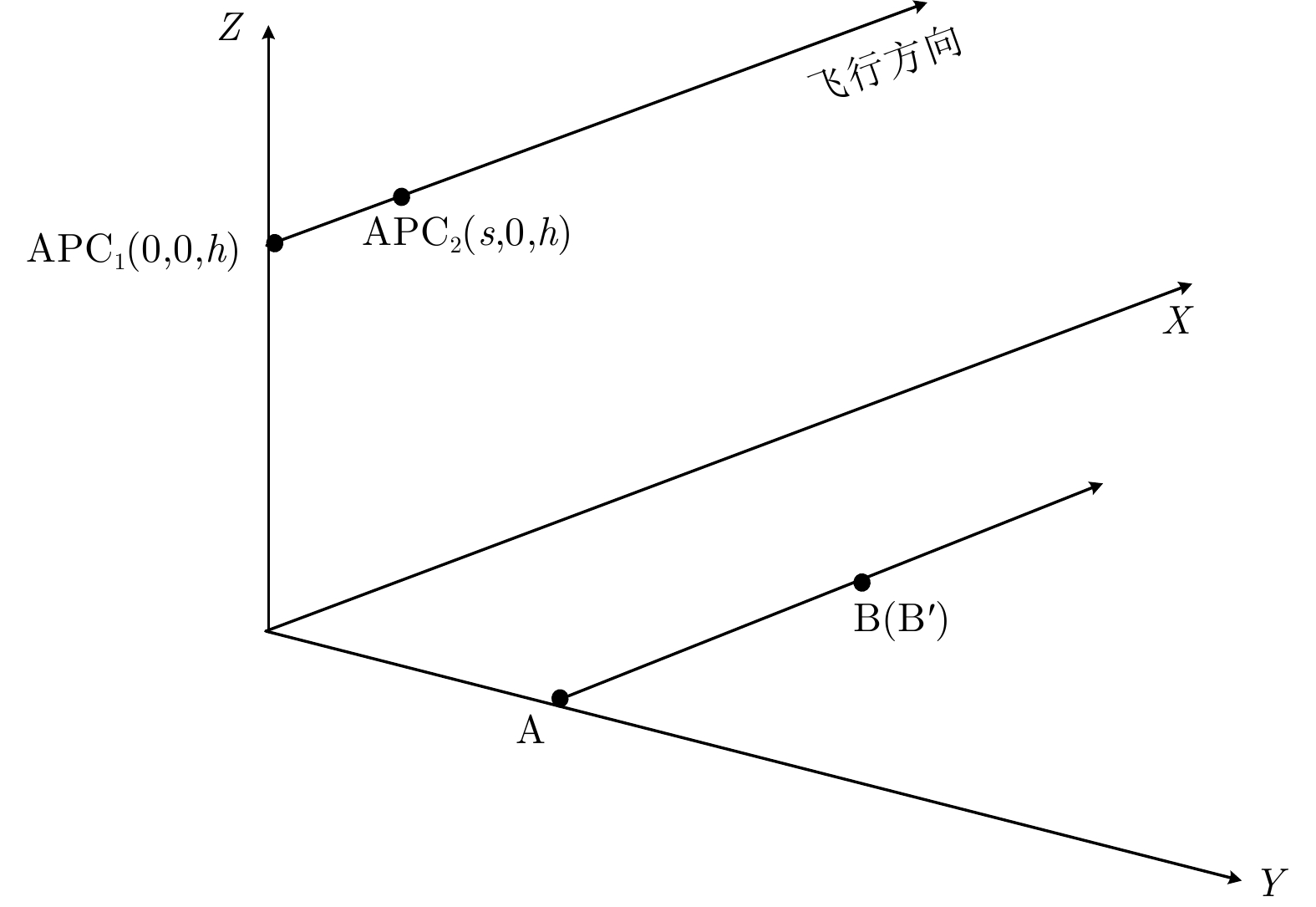
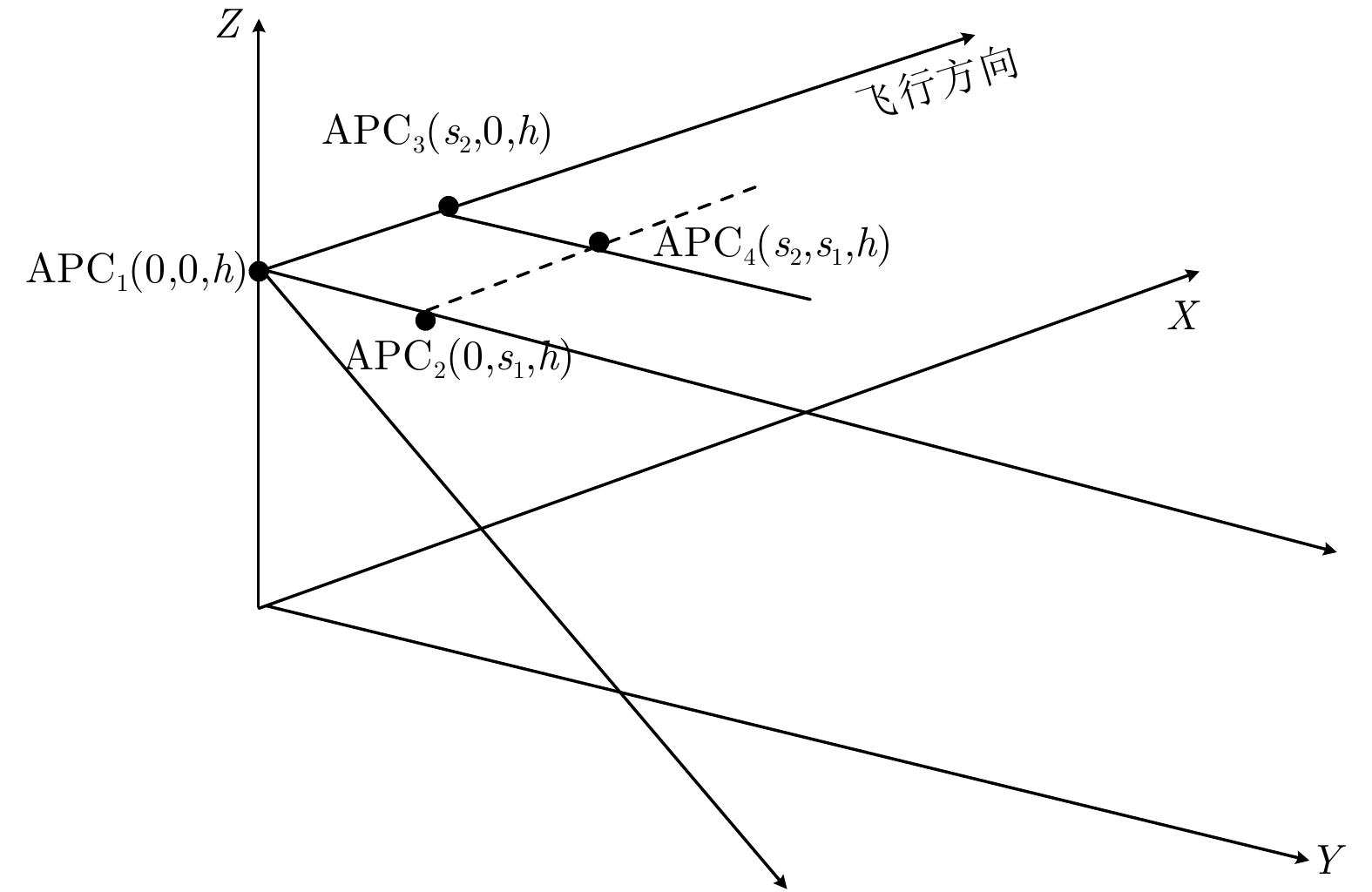
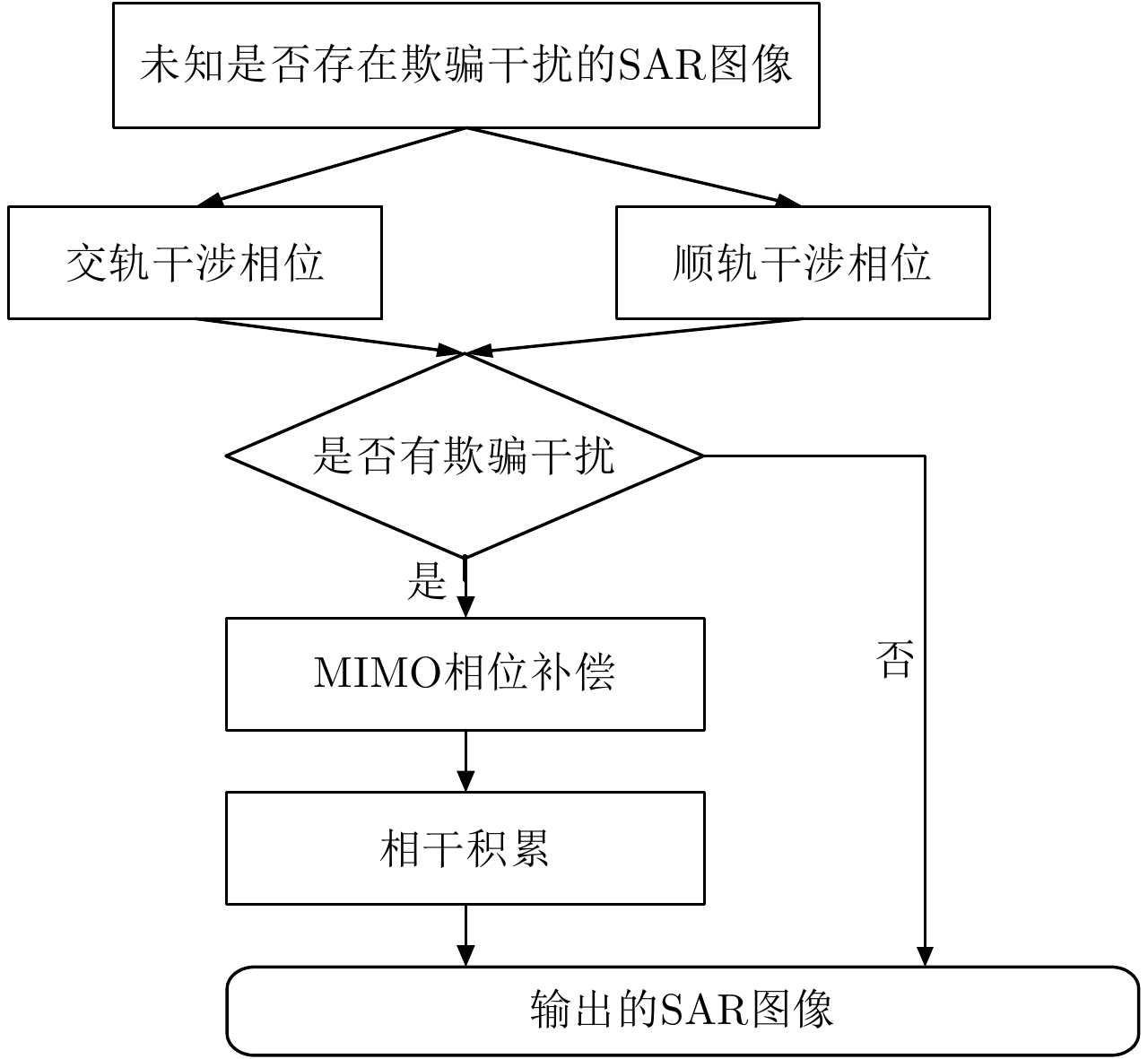
摘要: 针对距离延时和方位多普勒频率调制两类合成孔径雷达(SAR)欺骗干扰问题,该文提出一种基于多输入多输出合成孔径雷达(MIMO-SAR)的2维混合基线抗欺骗干扰方法。该方法采用基于MIMO-SAR的相位编码方案,使得多通道信号正交,利用多维相位信息识别欺骗干扰,通过相位补偿抑制干扰目标,从而提升雷达抗欺骗干扰能力。该文采用雷达抗干扰改善因子进行定量效果评估,在平台空间受限的条件下,该文方法比传统单发多收系统的雷达抗干扰改善因子提升3倍。仿真实验结果证明了该方法的有效性与正确性。
-
关键词:
- 抗欺骗干扰 /
- 多输入多输出合成孔径雷达 /
- 相位补偿 /
- 雷达抗干扰改善因子
Abstract: A novel approach using two-dimensional mixed baseline based on Multi-Input Multi-Output Synthetic Aperture Radar (MIMO-SAR) has been proposed for range delay and azimuth Doppler frequency modulation used in deceptive jamming. Based on MIMO-SAR phase coding method, which makes the multi-channel signal orthogonal, we propose the detection of deceptive jamming phenomenon by employing multi-dimensional phase information, and suppress the jamming targets via phase compensation to improve the ability of countering deceptive jamming. Moreover, we utilize radar anti-jamming improvement factor as a quantitative evaluating index. In the limited platform space, the radar anti-jamming improvement factor of the proposed method is three times greater than that of conventional single-input multi-output systems. Experimental results demonstrate the validity of our method. -
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 景中心斜距(km) 1.414 雷达有效速度(m/s) 150 发射脉冲时宽(μs) 2.5 距离调频率(Hz/s) 20 × 1012 雷达工作频率(GHz) 5.3 多普勒带宽(Hz) 80 距离采样率(MHz) 60 方位采样率(Hz) 400 回波信噪比(dB) 10 距离基线长度(m) 4 方位基线长度(m) 2  下载: 导出CSV
下载: 导出CSV
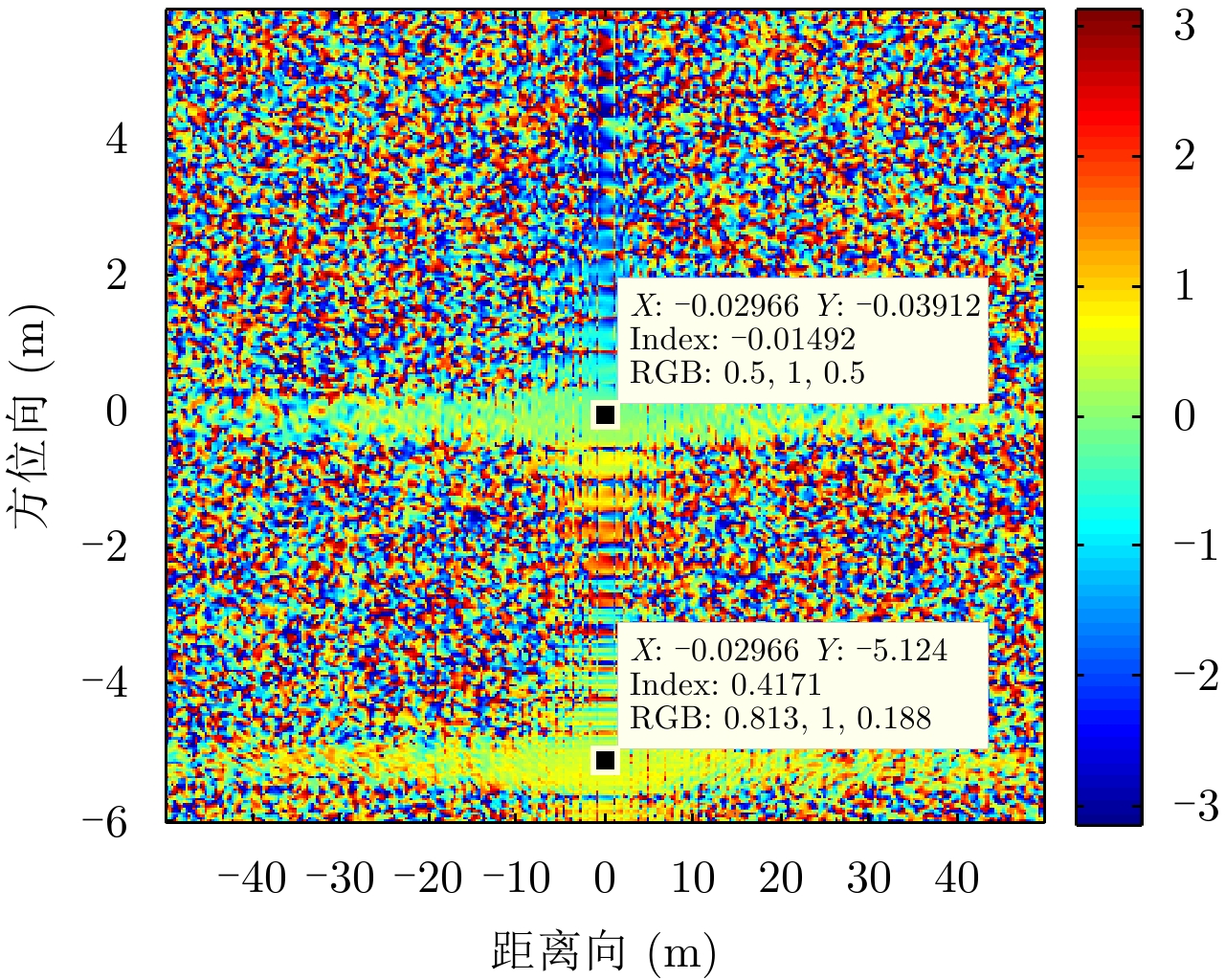
表 2 9点目标交轨干涉相位
Table 2. Cross-track interference phase of nine-point target
相位(rad) 第1列 第2列 第3列 第1行 0.1348 0.1370 0.1423 第2行 0.1360 0.1390 0.1407 第3行 0.1379 0.1370 0.1425
下载: 导出CSV
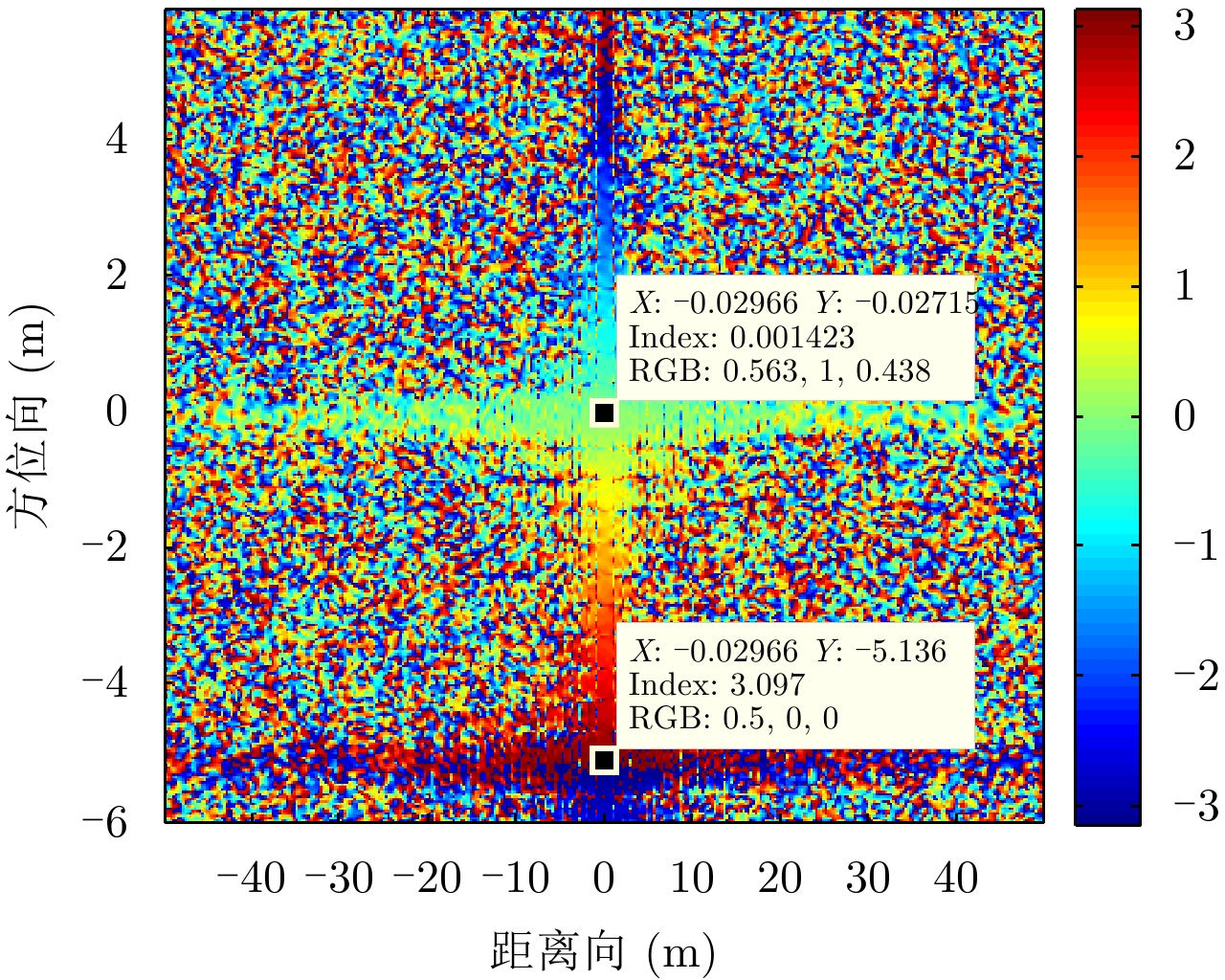
表 3 9点目标顺轨干涉相位
Table 3. Along-track interference phase of nine-point target
相位(rad) 第1列 第2列 第3列 第1行 3.085 3.085 3.085 第2行 0 0 0 第3行 –3.085 –3.086 –3.086
下载: 导出CSV
-
[1] 朱守保, 罗强, 童创明. SAR图像欺骗干扰方法研究[J]. 电光与控制, 2012, 19(4): 39–42. doi: 10.3969/j.issn.1671-637X.2012.04.010ZHU Shoubao, LUO Qiang, and TONG Chuangming. Methods of deceptive jamming to SAR image[J]. Electronics Optics &Control, 2012, 19(4): 39–42. doi: 10.3969/j.issn.1671-637X.2012.04.010 [2] ZHANG Jindong, ZHU Daiyin, and ZHANG Gong. New antivelocity deception jamming technique using pulses with adaptive initial phases[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1290–1300. doi: 10.1109/TAES.2013.6494414 [3] 孙光才, 周峰, 邢孟道, 等. 虚假场景SAR欺骗式干扰技术及实时性分析[J]. 西安电子科技大学学报(自然科学版), 2009, 36(5): 813–818, 866.SUN Guangcai, ZHOU Feng, XING Mengdao, et al. Deception-jamming technology against the SAR based on the deceptive scene and real-time analyses[J]. Journal of Xidian University, 2009, 36(5): 813–818, 866. [4] 马晓岩, 秦江敏, 贺照辉, 等. 抑制SAR压制性干扰的三通道对消方法[J]. 电子学报, 2007, 35(6): 1015–1020. doi: 10.3321/j.issn:0372-2112.2007.06.002MA Xiaoyan, QIN Jiangmin, HE Zhaohui, et al. Three-channel cancellation of SAR blanketing jamming suppression[J]. Acta Electronica Sinica, 2007, 35(6): 1015–1020. doi: 10.3321/j.issn:0372-2112.2007.06.002 [5] ZHOU F, SUN G, BAI X, et al. A novel method for adaptive SAR barrage jamming suppression[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(2): 292–296. doi: 10.1109/LGRS.2011.2166753 [6] 王晓东, 马泉成. 基于FMCW合成孔径雷达抗欺骗干扰方法研究[J]. 计算机仿真, 2013, 30(7): 5–10. doi: 10.3969/j.issn.1006-9348.2013.07.002WANG Xiaodong and MA Quancheng. Anti-deception jamming method for frequency modulated continuous wave synthetic aperture radar[J]. Computer Simulation, 2013, 30(7): 5–10. doi: 10.3969/j.issn.1006-9348.2013.07.002 [7] 彭发祥, 李宏伟, 蔡斌, 等. 星载多发多收SAR成像和抗欺骗干扰研究[J]. 现代防御技术, 2012, 40(2): 143–149, 154. doi: 10.3969/j.issn.1009-086x.2012.02.028PENG Faxiang, LI Hongwei, CAI Bin, et al. Research on spaceborne MIMO-SAR imaging and anti-deceptive jamming[J]. Modern Defence Technology, 2012, 40(2): 143–149, 154. doi: 10.3969/j.issn.1009-086x.2012.02.028 [8] 齐维孔, 禹卫东. 距离向DBF-SAR系统抗欺骗干扰研究[J]. 电子与信息学报, 2010, 32(12): 2830–2835. doi: 10.3724/SP.J.1146.2010.00074QI Weikong and YU Weidong. Research on countering deceptive jamming with range DBF-SAR system[J]. Journal of Electronics &Information Technology, 2010, 32(12): 2830–2835. doi: 10.3724/SP.J.1146.2010.00074 [9] SOUMEKH M. SAR-ECCM using phase-perturbed LFM chirp signals and DRFM repeat jammer penalization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 191–205. doi: 10.1109/TAES.2006.1603414 [10] Emmanuel Arturo Solis Nepote. Chaotic and chaotic based frequency modulated signals for radar imaging[D]. [Master dissertation], University of Manitoba, 2003. [11] LI Chen and ZHU Daiyin. The detection of deception jamming against SAR based on dual-aperture antenna cross-track interferometry[C]. 2006 CIE International Conference on Radar, Shanghai, China, 2006: 1–4. doi: 10.1009/ICR.2006.343274. [12] QIN Jiangmin, YANG Jun, HE Zhaohui, et al. Analysis of target loss due to suppressing SAR jamming using dual-channel cancellation[C]. 2006 CIE International Conference on Radar, Shanghai, China, 2006: 1–4. doi: 10.1109/ICR.2006.343324. [13] SUN Bingzhang and LI Jingwen. A new interference elimination method for multi-satellite SAR system[C]. IGARSS 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 2008, 4: IV-1316–IV-1319. doi: 10.1109/IGARSS.2008.4779973 [14] ZHAO Bo, HUANG Lei, LI Jian, et al. Target reconstruction from deceptively jammed single-channel SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(1): 152–167. doi: 10.1109/TGRS.2017.2744178 [15] 王杰, 丁赤飚, 梁兴东, 等. 机载同时同频MIMO-SAR系统研究概述[J]. 雷达学报, 2018, 7(2): 220–234. doi: 10.12000/JR17046WANG Jie, DING Chibiao, LIANG Xingdong, et al. Research outline of airborne MIMO-SAR system with same time-frequency coverage[J]. Journal of Radars, 2018, 7(2): 220–234. doi: 10.12000/JR17046 [16] 黄洪旭, 黄知涛, 周一宇. 对合成孔径雷达的移频干扰研究[J]. 宇航学报, 2006, 27(3): 463–468. doi: 10.3321/j.issn:1000-1328.2006.03.027HUANG Hongxu, HUANG Zhitao, and ZHOU Yiyu. A study on the shift-frequency jamming to SAR[J]. Journal of Astronautics, 2006, 27(3): 463–468. doi: 10.3321/j.issn:1000-1328.2006.03.027 [17] HE Xiaodong, WANG Zhen, and TANG Bin. Two-dimensional frequency modulation jamming to SAR based on ship-borne jammer[J]. International Journal of Electronics Letters, 2016, 4(2): 141–157. doi: 10.1080/00207217.2014.966782 [18] 许宝民, 郑光勇, 李宏. 合成孔径雷达有源欺骗干扰仿真分析[J]. 飞行器测控学报, 2010, 29(3): 84–87.XU Baomin, ZHENG Guangyong, and LI Hong. Simulation research on active deceptive jamming to SAR[J]. Journal of Spacecraft TT &C Technology, 2010, 29(3): 84–87. [19] 刘永才, 王伟, 潘小义, 等. 基于延迟-移频的SAR有源欺骗干扰有效区域研究[J]. 雷达学报, 2013, 2(1): 46–53. doi: 10.3724/SP.J.1300.2012.13001LIU Yongcai, WANG Wei, PAN Xiaoyi, et al. Effective region of active decoy jamming to SAR based on time-delay doppler-shift method[J]. Journal of Radars, 2013, 2(1): 46–53. doi: 10.3724/SP.J.1300.2012.13001 -






图(14) / 表(3)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

