
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Forward-looking Multi-channel SAR Adaptive Identification to Suppress Deception Jamming
-
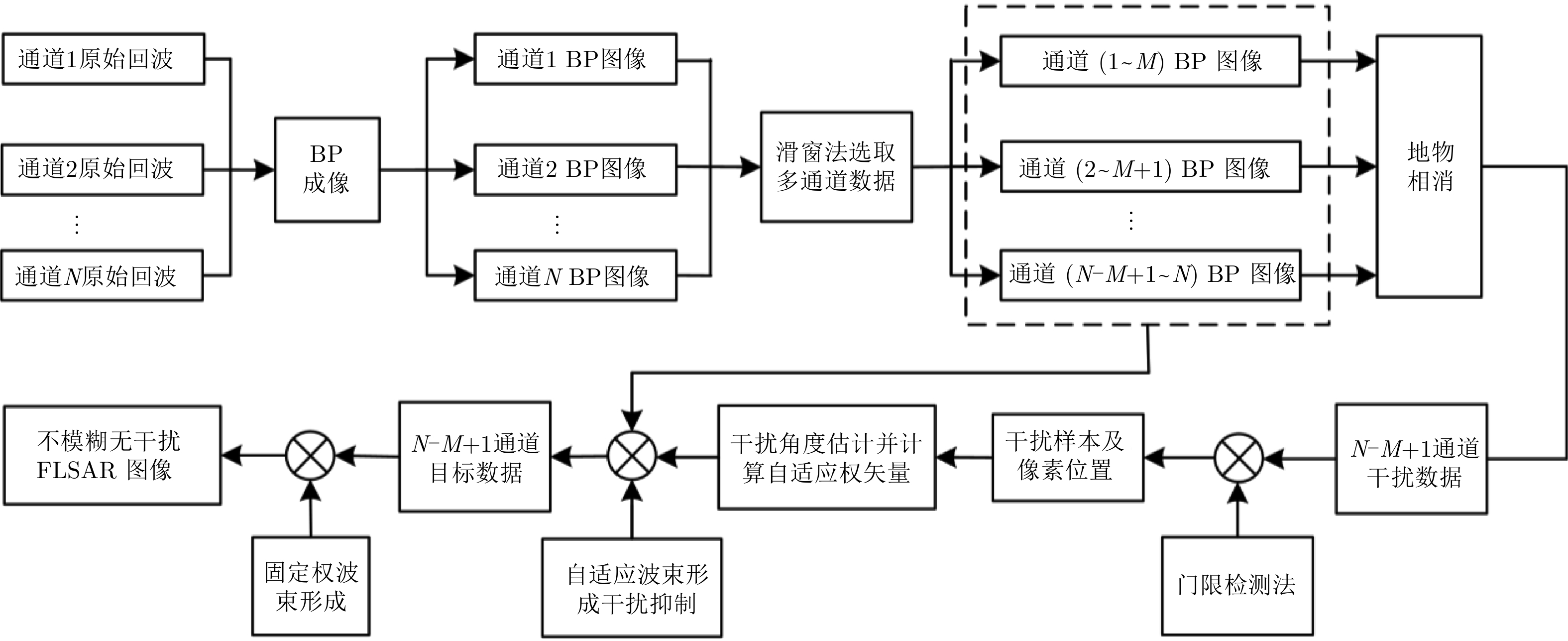
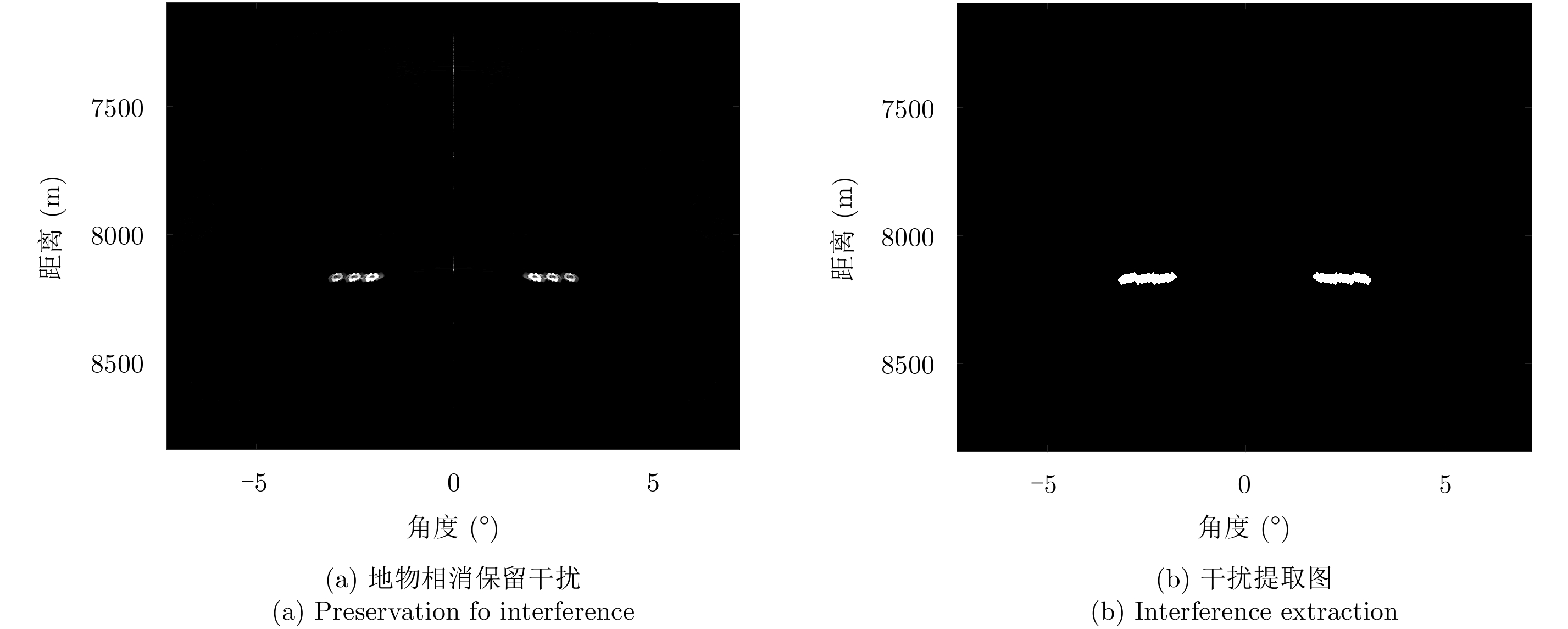
摘要: 前视多通道SAR成像存在回波左右模糊的问题,在成像时需要利用空域资源进行解模糊处理,使得其成像过程较一般侧视SAR更加复杂。在复杂电磁环境下,若要获得无干扰、不模糊的前视SAR图像,难度较大。该文提出一种基于方位向自适应波束形成(AADBF)技术的欺骗干扰自适应鉴别抑制算法。该算法首先采用AADBF技术对多通道接收回波信号进行地物相消,保留欺骗干扰样本。然后利用门限检测法在高分辨SAR图像上,鉴别出欺骗干扰的像素位置。最后,对存在干扰的像素点进行自适应空域滤波,从而达到抗欺骗干扰的目的。仿真结果表明,该方法能够有效地鉴别并抑制欺骗干扰,与此同时能够实现前视SAR无干扰聚焦成像。Abstract: Forward-looking multi-channel SAR imaging suffers from ambiguity regarding left and right echoes. To deblur the imaging process, spatial resources must be used, which make the imaging process more complex than the general side-looking SAR. In complex electromagnetic environments, it is very difficult to obtain forward-looking SAR images without interference or ambiguity. In this paper, we present an adaptive discriminant suppression algorithm that addresses deception jamming based on Azimuth ADaptive Beam Forming (AADBF). First, we use the AADBF technique to cancel the multi-channel received echo signal and retain the deception jamming samples. Then, we use the threshold detection method to identify the pixel location of the deception jamming on high-resolution SAR images. Finally, we apply adaptive spatial filtering to pixels with interference to achieve anti-deception jamming. Simulation results show that this method can effectively identify and suppress deception jamming, while realizing forward-looking SAR non-interference focusing imaging.
-
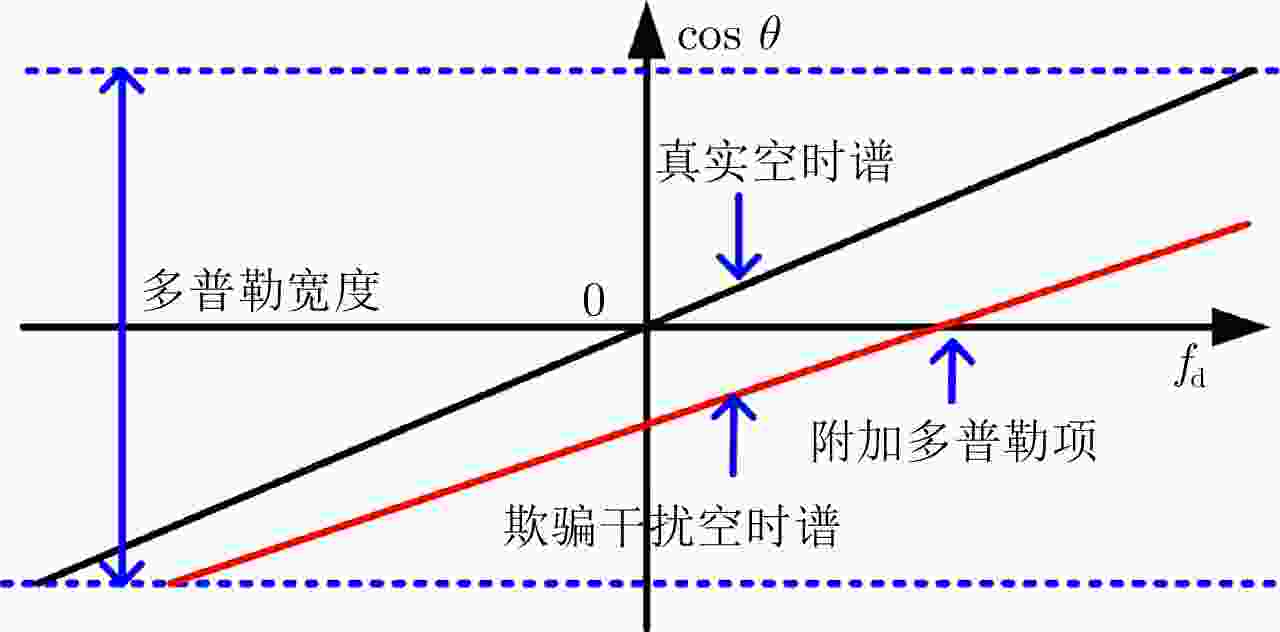
图 2 欺骗干扰与真实回波空时关系差异
Figure 2. Difference between deception jamming and real echo space time relationship
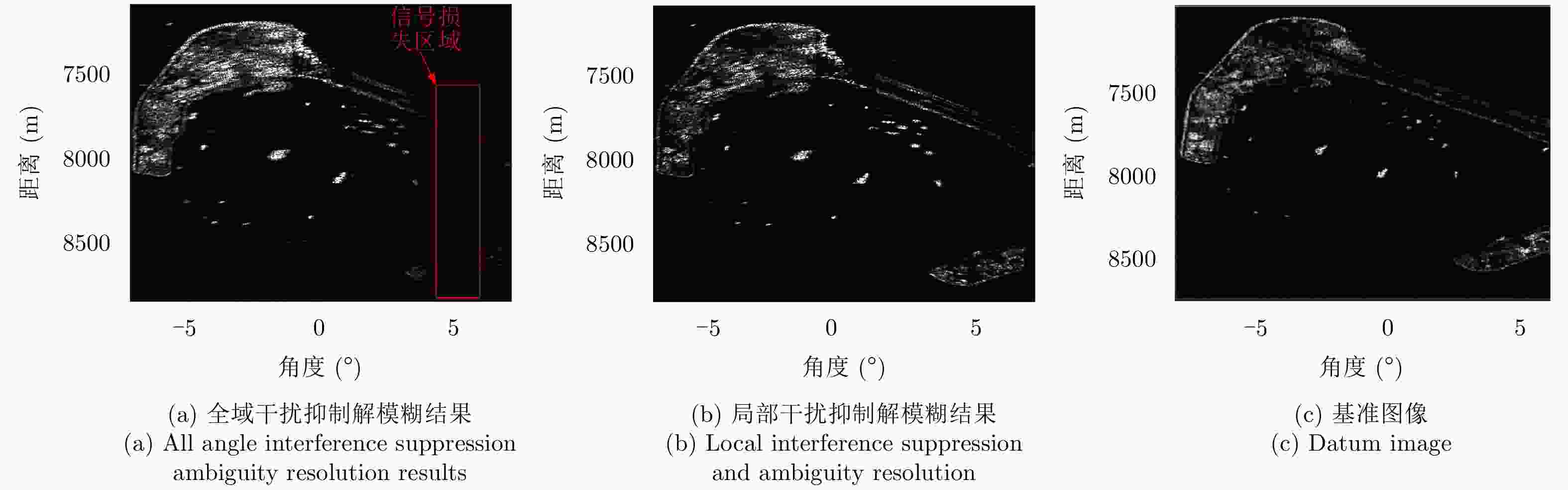
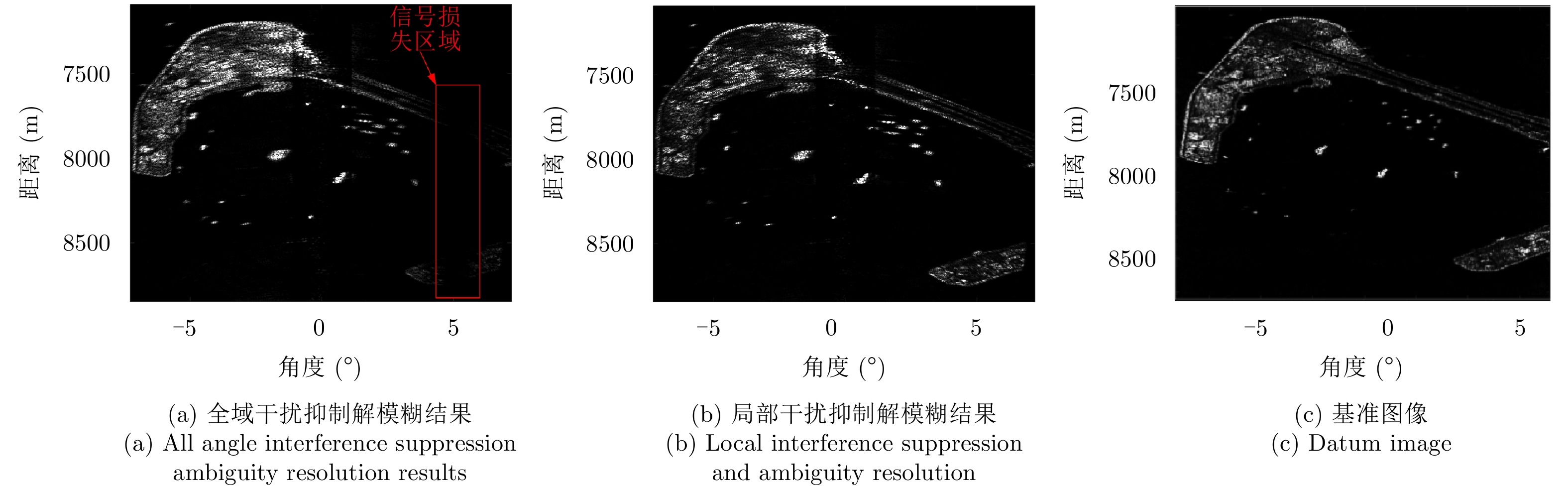
图 7 欺骗干扰抑制解模糊对比
Figure 7. Comparison of deception interference suppression ambiguity resolution
表 1 系统参数
Table 1. System parameters
参数 数值 载频 35 GHz 信号带宽 50 MHz 脉冲宽度 0.5 μs 采样带宽 60 MHz 平台高度 4000 m 脉冲重复频率 9 kHz 波束方位宽度 20° 波束俯仰宽度 22° 场景中心斜距${R_s}$ 8 km 阵列实孔径长度 0.0642 m  下载: 导出CSV
下载: 导出CSV
表 2 处理性能对比
Table 2. The comparison of processing performance
处理结果 信干比增益(dB) 干扰抑制比(dB) 信号抑制比(dB) 含干扰图像 –15.60 0 0 全域干扰抑制 0 30.75 30.75 局部干扰抑制 32.06 31.75 –0.31
下载: 导出CSV
-
[1] 张英杰, 王彦平, 谭维贤, 等. 机载前视阵列SAR运动补偿研究[J]. 雷达学报, 2013, 2(2): 168–179. doi: 10.3724/SP.J.1300.2013.20067ZHANG Ying-jie, WANG Yan-ping, TAN Wei-xian, et al. Motion compensation for airborne forward looking synthetic aperture radar with linear array antennas[J]. Journal of Radars, 2013, 2(2): 168–179. doi: 10.3724/SP.J.1300.2013.20067 [2] DAI S L, LIU M, SUN Y J, et al. The latest development of high resolution imaging for forward looking SAR with multiple receiving antennas[C]. Proceedings of Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 2001: 1433–1435. [3] 冯德军, 王俊杰, 王俊卿. 移频导前假目标的特性分析及其鉴别方法[J]. 雷达学报, 2017, 6(4): 325–331. doi: 10.12000/JR17026FENG Dejun, WANG Junjie, and WANG Junqing. Signature analysis and discrimination method of preceded frequency-shift false target[J]. Journal of Radars, 2017, 6(4): 325–331. doi: 10.12000/JR17026 [4] 齐维孔, 禹卫东. 距离向DBF-SAR系统抗欺骗干扰研究[J]. 电子与信息学报, 2010, 32(12): 2830–2835. doi: 10.3724/SP.J.1146.2010.00074QI Wei-kong and YU Wei-dong. Research on countering deceptive jamming with range DBF-SAR system[J]. Journal of Electronics &Information Technology, 2010, 32(12): 2830–2835. doi: 10.3724/SP.J.1146.2010.00074 [5] 张双喜, 孙光才, 刘艳阳, 等. 基于四通道SAR欺骗式干扰抑制算法[J]. 现代雷达, 2011, 33(2): 22–26, 30. doi: 10.3969/j.issn.1004-7859.2011.02.006ZHANG Shuang-xi, SUN Guang-cai, LIU Yan-yang, et al. Deception interference supression algorithm based on four-channel for SAR[J]. Modern Radar, 2011, 33(2): 22–26, 30. doi: 10.3969/j.issn.1004-7859.2011.02.006 [6] 冯祥芝, 许小剑. 随机线性调频斜率SAR抗欺骗干扰方法研究[J]. 系统工程与电子技术, 2009, 31(1): 69–73. doi: 10.3321/j.issn:1001-506X.2009.01.018FENG Xiang-zhi and XU Xiao-jian. Study of countermeasures to deceptive jamming using random linear modulation frequency ratio SAR[J]. Systems Engineering and Electronics, 2009, 31(1): 69–73. doi: 10.3321/j.issn:1001-506X.2009.01.018 [7] KRIEGER G, GEBERT N, and MOREIRA N. Multidimensional waveform encoding: A new digital beamforming technique for synthetic aperture radar remote sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 31–46. doi: 10.1109/TGRS.2007.905974 [8] 谢文冲, 段克清, 王永良. 机载雷达空时自适应处理技术研究综述[J]. 雷达学报, 2017, 6(6): 575–586. doi: 10.12000/JR17073XIE Wenchong, DUAN Keqing, and WANG Yongliang. Space time adaptive processing technique for airborne radar: An overview of its development and prospects[J]. Journal of Radars, 2017, 6(6): 575–586. doi: 10.12000/JR17073 [9] 王永良, 丁前军, 李荣锋. 自适应阵列处理[M]. 北京: 清华大学出版社, 2009: 66–72.WANG Yong-liang, DING Qian-jun, and LI Rong-feng. Adaptive Array Processing[M]. Beijing: Tsinghua University Press, 2009: 66–72. [10] 龚耀寰. 自适应滤波-时域自适应滤波和智能天线[M]. 第2版, 北京: 电子工业出版社, 2003: 288–297.GONG Yao-huan. Adaptive Filtering-Time Domain Adaptive Filtering and Smart Antenna[M]. 2nd ed., Beijing: Public House of Electronic Industry, 2003: 288–297. [11] YEGULALP A F. Fast backprojection algorithm for synthetic aperture radar[C]. Proceedings of 1999 IEEE Radar Conference, Radar into the Next Millennium, Waltham, Massachusetts, USA, 1999: 60–65. doi: 10.1109/NRC.1999.767270. [12] 包敏, 周鹏, 史林. 双天线前视弹载SAR解模糊算法研究[J]. 电子与信息学报, 2013, 35(12): 2857–2862. doi: 10.3724/SP.J.1146.2013.00083BAO Min, ZHOU Peng, and SHI Lin. Study on deambiguity algorithm for double antenna forward looking missile borne SAR[J]. Journal of Electronics &Information Technology, 2013, 35(12): 2857–2862. doi: 10.3724/SP.J.1146.2013.00083 [13] 卢景月, 张磊, 王冠勇. 前视多通道合成孔径雷达解模糊成像方法[J]. 电子与信息学报, 2018, 40(12): 2820–2825. doi: 10.11999/JEIT180177LU Jing-yue, ZHANG Lei, and WANG Guan-yong. Ambiguity resolving and imaging algorithm for multi-channel forward-looking synthetic aperture radar[J]. Journal of Electronics &Information Technology, 2018, 40(12): 2820–2825. doi: 10.11999/JEIT180177 -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

