
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Time-frequency Analysis Techniques for Recognition and Suppression of Interrupted Sampling Repeater Jamming
-
摘要: 间歇采样转发式干扰利用数字射频存储器(DRFM)对雷达发射信号进行截获与转发,具有小型化、轻量化和灵活多变的优势,可搭载在目标上形成多点源主瓣干扰,对现代雷达构成了严重威胁。该文对上述干扰的辨识与抑制方法进行了研究。通过推导干扰脉冲压缩与时频分布的解析表达式,分析了目标回波与典型干扰信号的时频特征差异;在此基础上,提出一种时频域干扰辨识方法,并构造时频域滤波器进行干扰抑制。仿真结果表明:在原始信号干噪比大于–3 dB的情况下,算法辨识率可达90%;在此基础上,通过时频域滤波可以对3种典型策略下干扰都进行有效抑制,其峰值信干噪比改善可达18 dB。Abstract: Through partial intercepting and multiple forwarding of a radar transmitting signal, Digital Radio Frequency Memory (DRFM)-based Interrupted Sampling Repeater Jamming (ISRJ) possesses advantages of small size, light weight, and flexibility. Thus, DRFM-ISRJ can be equipped on targets to perform multi-point source main-lobe jamming, posing a serious threat to modern radars. In this study, a time-frequency domain recognition and suppression method was analyzed. First, the expression of pulse compression and Time-Frequency Distribution (TFD) of the jamming signal were deduced. Then, the differences of TFD between target echo and jamming signal were analyzed. On this basis, a jamming recognition program and a time-frequency domain filter to suppress the jamming were proposed. Simulation results show that the recognition rate is better than 90% when the jamming-to-noise ratio is over –3 dB for the received signal. Based on correct recognition, a signal to jamming-and-noise ratio improvement of 18 dB can be achieved using the time-frequency filter.
-
Key words:
- Repeater jammer /
- Time-frequency analysis /
- Jamming recognition /
- Jamming suppression
-

图 2 基于时频分析的干扰辨识流程
Figure 2. The flow of jamming recognition with time-frequency analysis
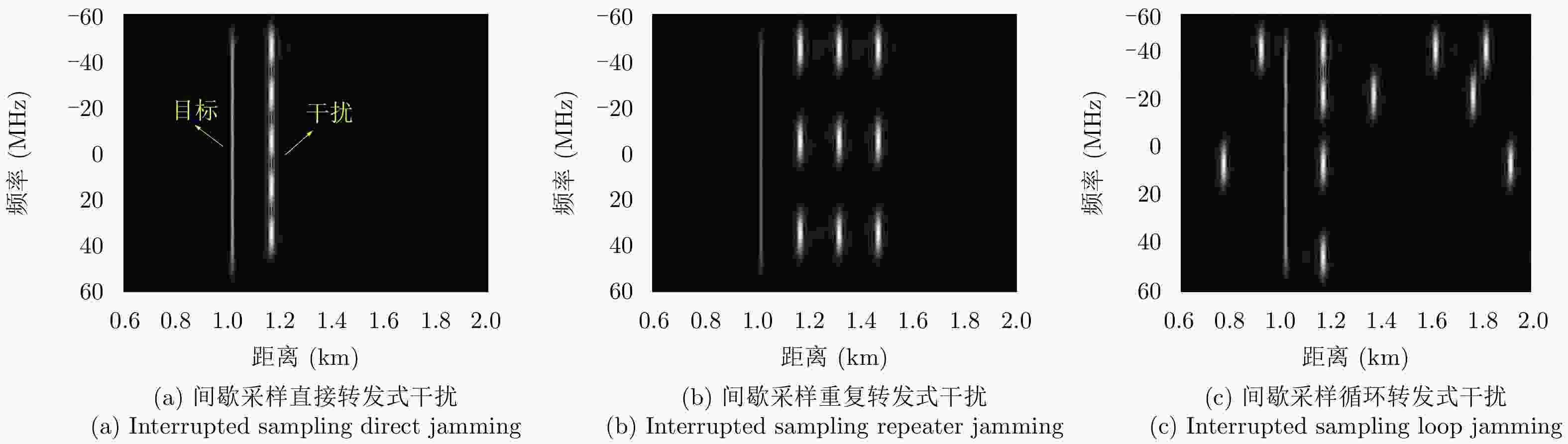
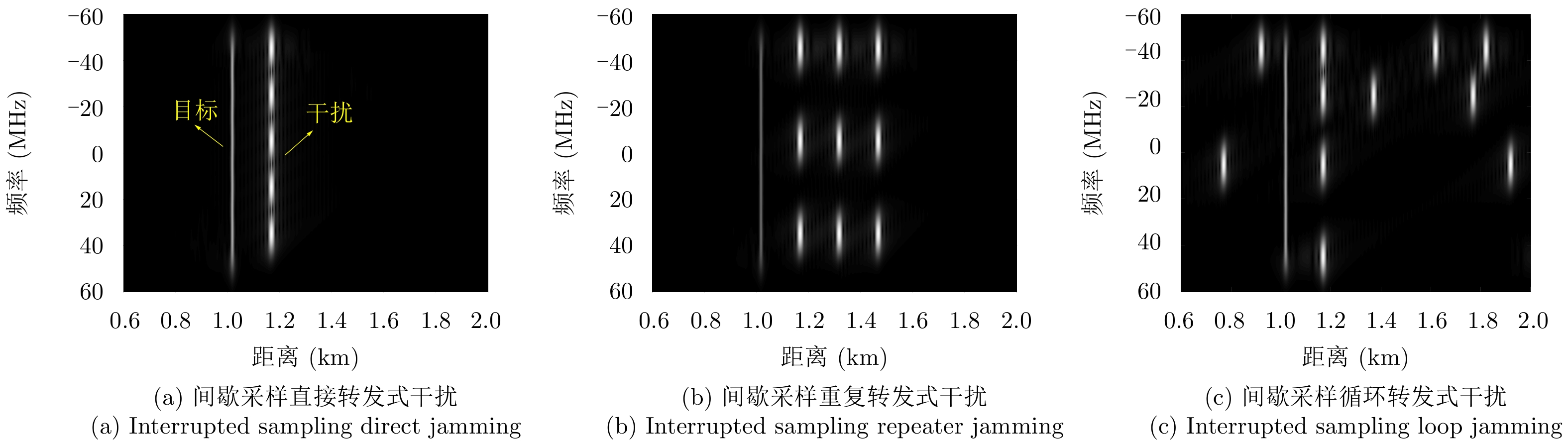
图 4 目标与干扰脉压结果的时频分布
Figure 4. The time-frequency distribution of pulse compression result of target and jamming signal
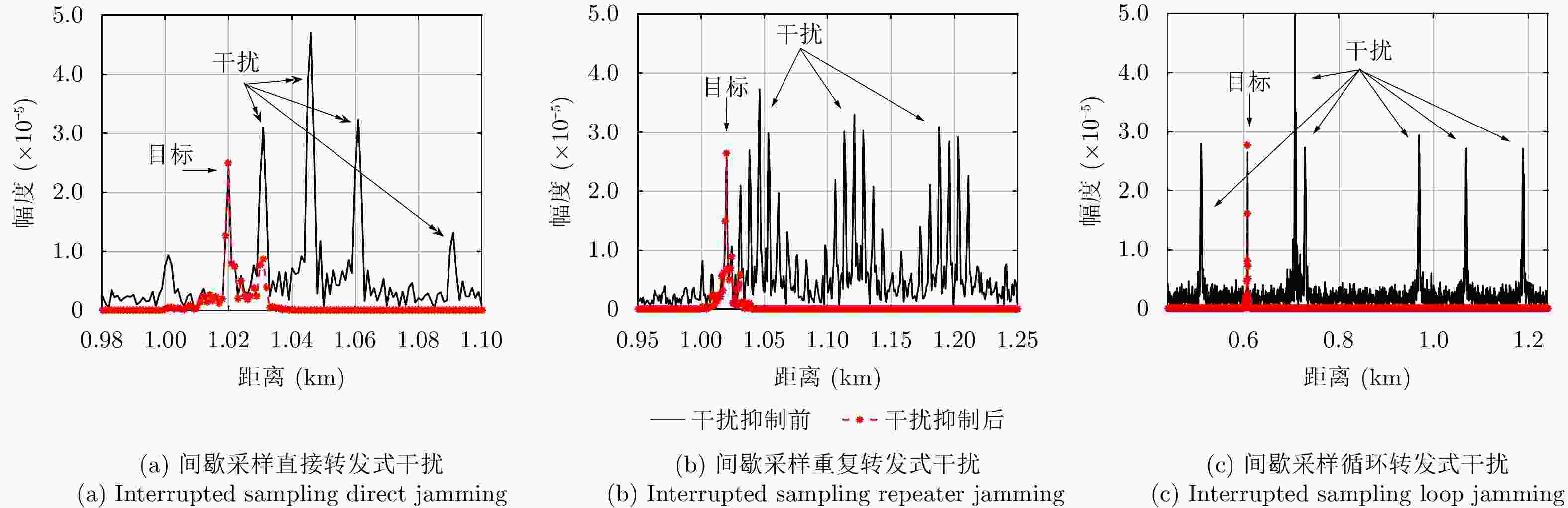
图 6 不同干扰策略下的干扰抑制结果
Figure 6. Jamming suppression results of different jamming strategies
表 1 干扰辨识与抑制仿真参数
Table 1. Simulation parameters for jamming recognition and suppression
参数名 参数值 发射信号 Chirp 信号带宽(MHz) 100 信号脉宽(μs) 10 采样率(MHz) 150 切片宽度(μs) 1~5 信干比(原始回波)(dB) –15  下载: 导出CSV
下载: 导出CSV
-
[1] SCHLEHER D C. Electronic Warfare in the Information Age[M]. Boston, London: Artech House, 1999: 293–330. [2] 孙国营, 李云杰, 高梅国, 等. 基于滤波器组的数字射频存储系统[J]. 北京理工大学学报, 2011, 31(11): 1347–1350. doi: 10.15918/j.tbit1001-0645.2011.11.018SUN Guo-ying, LI Yun-jie, GAO Mei-guo, et al. DRFM system based on analysis and synthesis filter bank[J]. Transactions of Beijing Institute of Technology, 2011, 31(11): 1347–1350. doi: 10.15918/j.tbit1001-0645.2011.11.018 [3] ZHANG H G, LUO J, CHEN X L, et al.. Fresnel based frequency domain adaptive beamforming for large aperture distributed array radar[C]. Proceedings of 2016 IEEE International Conference on Signal Processing, Communications and Computing, Hong Kong, China, 2016: 1–5. doi: 10.1109/ICSPCC.2016.7753658. [4] ZHANG H G, LUO J, CHEN X L, et al.. Whitening filter for mainlobe interference suppression in distributed array radar[C]. Proceedings of 2016 CIE international Conference on Radar, Guangzhou, China, 2016: 1–5. doi: 10.1109/RADAR.2016.8059238. [5] BERGER S D. Digital radio frequency memory linear range gate stealer spectrum[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(2): 725–735. doi: 10.1109/TAES.2003.1207279 [6] 刘国满, 郑坤, 高梅国. 一种欺骗式SAR干扰信号发生器的设计与实现[J]. 北京理工大学学报, 2012, 32(2): 184–188. doi: 10.3969/j.issn.1001-0645.2012.02.016LIU Guo-man, ZHENG Kun, and GAO Mei-guo. Design and implementation of deception jamming signal generator against SAR[J]. Transactions of Beijing Institute of Technology, 2012, 32(2): 184–188. doi: 10.3969/j.issn.1001-0645.2012.02.016 [7] SOUMEKH M. SAR-ECCM using phase-perturbed LFM chirp signals and DRFM repeat jammer penalization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 191–205. doi: 10.1109/TAES.2006.1603414 [8] 周阳, 毕大平, 沈爱国, 等. 基于运动调制的SAR-GMTI间歇采样遮蔽干扰方法[J]. 雷达学报, 2017, 6(4): 359–367. doi: 12000/JR16075ZHOU Yang, BI Da-ping, SHEN Ai-guo, et al. Intermittent sampling repeater shading jamming method based on motion modulation for SAR-GMTI[J]. Journal of Radars, 2017, 6(4): 359–367. doi: 12000/JR16075 [9] WANG Xue-song, LIU Jian-cheng, ZHANG Wen-ming, et al. Mathematic principles of interrupted-sampling repeater jamming (ISRJ)[J]. Science in China Series F: Information Sciences, 2007, 50(1): 113–123. [10] 刘忠. 基于DRFM的线性调频脉冲压缩雷达干扰新技术[D]. [博士论文], 国防科学技术大学, 2006: 1–20.LIU Zhong. Jamming technique for countering LFM pulse compression radar based on digital radio frequency memory[D]. [Ph.D. dissertation], National University of Defense Technology, 2006: 1–20. [11] SPARROW M J and CIKALO J. ECM techniques to counter pulse compression radar[P]. US, Patent 7081846, 2006. [12] 李宏, 郑光勇, 杨英科, 等. 部分截取雷达信号多假目标干扰性能分析[J]. 电子信息对抗技术, 2010, 25(3): 39–44. doi: 10.3969/j.issn.1674-2230.2010.03.010LI Hong, ZHENG Guang-yong, YANG Ying-ke, et al. The performance analysis of multi-false targets jamming of part copying radar pulse[J]. Electronic Information Warfare Technology, 2010, 25(3): 39–44. doi: 10.3969/j.issn.1674-2230.2010.03.010 [13] 李宏, 牟能文, 郭雷. 相参干扰的压制距离[J]. 电子信息对抗技术, 2015, 30(4): 33–36. doi: 10.3969/j.issn.1674-2230.2015.04.008LI Hong, MOU Neng-wen, and GUO Lei. Depressing distance of coherent jamming[J]. Electronic Information Warfare Technology, 2015, 30(4): 33–36. doi: 10.3969/j.issn.1674-2230.2015.04.008 [14] 黎明也, 曹志华, 朱宝增. 对线性调频雷达的密集假目标干扰研究[J]. 中国电子科学研究院学报, 2014, 9(3): 272–276. doi: 10.3969/j.issn.1673-5692.2014.03.009LI Ming-ye, CAO Zhi-hua, and ZHU Bao-zeng. The study of dense false-farget jamming to LFM radar[J]. Journal of CAEIT, 2014, 9(3): 272–276. doi: 10.3969/j.issn.1673-5692.2014.03.009 [15] SANANDAJI N and SOLEIMANI M. Pulse compression security enhancement as an electronic protection technique by exploiting a block cipher output as phase-code[J]. IET Radar, Sonar & Navigation, 2015, 9(4): 384–391. doi: 10.1049/iet-rsn.2014.0066 [16] GONG S X, WEI X Z, and LI X. ECCM scheme against interrupted sampling repeater jammer based on time-frequency analysis[J]. Journal of Systems Engineering and Electronics, 2014, 25(6): 996–1003. doi: 10.1109/JSEE.2014.00114 [17] 任博. 多点源干扰的雷达极化统计特性及其应用研究[D]. [硕士论文], 国防科学技术大学, 2016: 10–15.REN Bo. Research and application on radar polarization statistical characteristics of multipoint-source interferences[D]. [Master dissertation], National University of Defense Technology, 2016: 10–15. [18] 施龙飞, 毛楚乔, 张建明, 等. 基于极化-空间谱特征的雷达目标检测方法[J]. 雷达科学与技术, 2018, 16(2): 174–180. doi: 10.3969/j.issn.1672-2337.2018.02.010SHI Long-fei, MAO Chu-qiao, ZHANG Jian-ming, et al. A target detection method based on polarization-space joint spectrum characteristic[J]. Radar Science and Technology, 2018, 16(2): 174–180. doi: 10.3969/j.issn.1672-2337.2018.02.010 [19] ZHOU C, SHI F Q, and LIU Q H. Research on parameters estimation and suppression for C&I jamming[C]. Proceedings of 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 215–218. doi: 10.1109/RADAR.2016.8059169 [20] 张晔. 信号时频分析及应用[M]. 哈尔滨: 哈尔滨工业大学出版社, 2006.ZHANG Ye. Signal Time Frequency Analysis and Its Application[M]. Harbin: Harbin Institute of Technology Press, 2006. -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

