
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Waveform Design for Cognitive Radar Under Low PAR Constraints by Convex Optimization
-
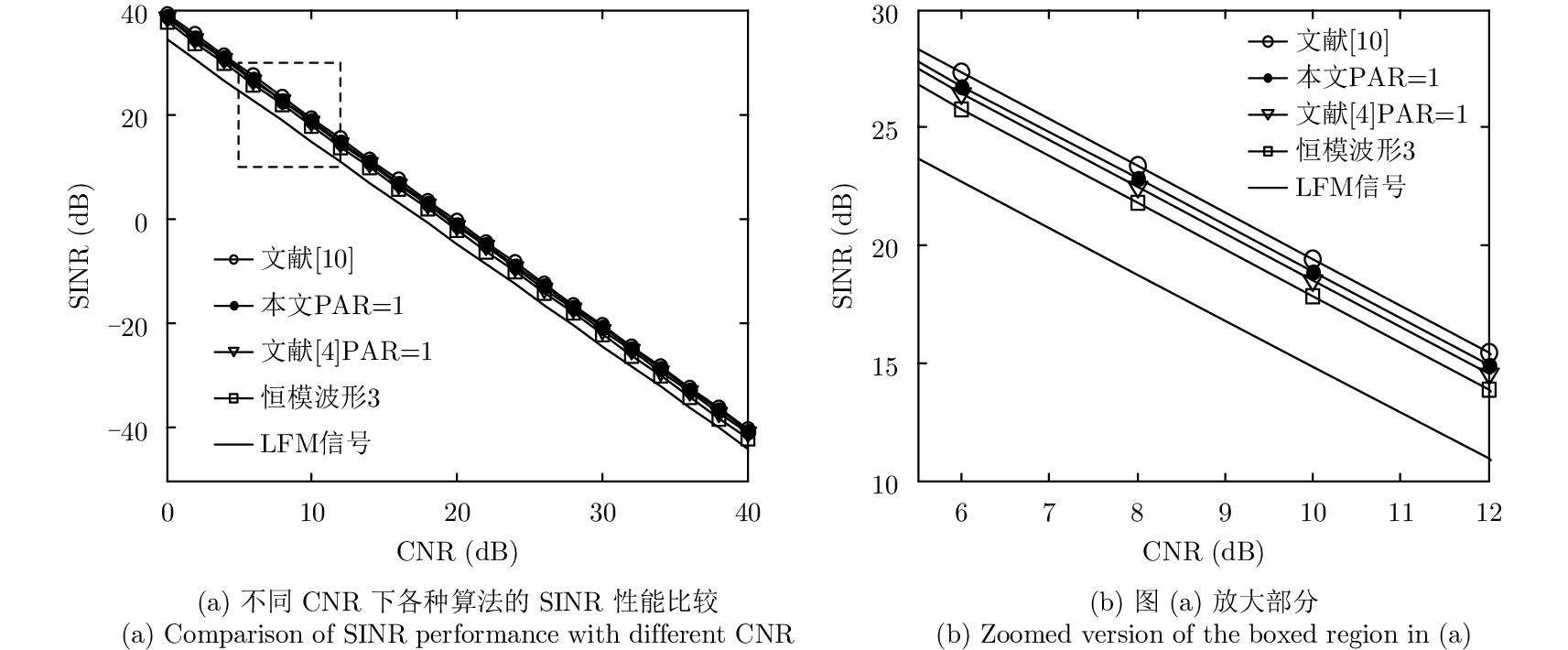
摘要: 为了提高雷达发射波形的检测性能,同时使发射机发挥其最大效能,以发射波形的低峰均比(PAR)为约束条件,该文提出了一种信号相关杂波背景下的认知雷达发射波形和接收机滤波器联合优化方法。首先,面向距离扩展目标检测问题,构建关于雷达输出信干噪比(SINR)的优化模型;然后将该模型转化为Rayleigh商形式,给出了接收机权值的解析表达式;在此基础上,通过半正定松弛,将关于发射波形半正定矩阵的非凸问题转化为凸问题,求得发射波形的最优矩阵解;最后,将秩1近似法和最近邻方法相结合,从最优矩阵解中提取出发射波形的最优向量解。该方法在给定PAR取值范围内可使波形的输出SINR达到最大,PAR=2时波形的SINR值与能量约束下优化波形的SINR值相同,并且比PAR=1时所得波形高出约0.5 dB。仿真结果验证了所提方法的有效性。
-
关键词:
- 认知雷达 /
- 波形设计 /
- 峰均比(PAR) /
- 凸优化 /
- 半正定松弛(SDR)
Abstract: To improve the detection performance of the radar transmit waveform while enabling the transmitter to perform at its maximal efficiency, a joint design method is proposed for the transmit and receive filter in the presence of signal-dependent clutter with a Peak-to-Average-power Ratio (PAR) constraint of the transmit waveform. First, an optimized model of the radar’s output Signal-to-Interference-plus-Noise Ratio (SINR) for range-extended target detection is established. Second, the analytic expression of the receiver is obtained by converting the optimization problem into the Rayleigh quotient model. The optimal matrix solution is then obtained by transforming the non-convex problem into a convex problem via the semi-definite matrix of the waveform. Finally, the optimal vector solution of the waveform is extracted from the optimal matrix solution by combining the rank-one approximation method combined with the nearest neighbor method. An optimal waveform with a maximal output SINR for a given PAR range is obtained using the proposed method. The SINR value of the waveform when PAR = 2 is the same as the SINR value of the optimized waveform under the energy constraint and is about 0.5 dB higher than the waveform when PAR = 1. Simulation results demonstrate the effectiveness of the proposed method. -
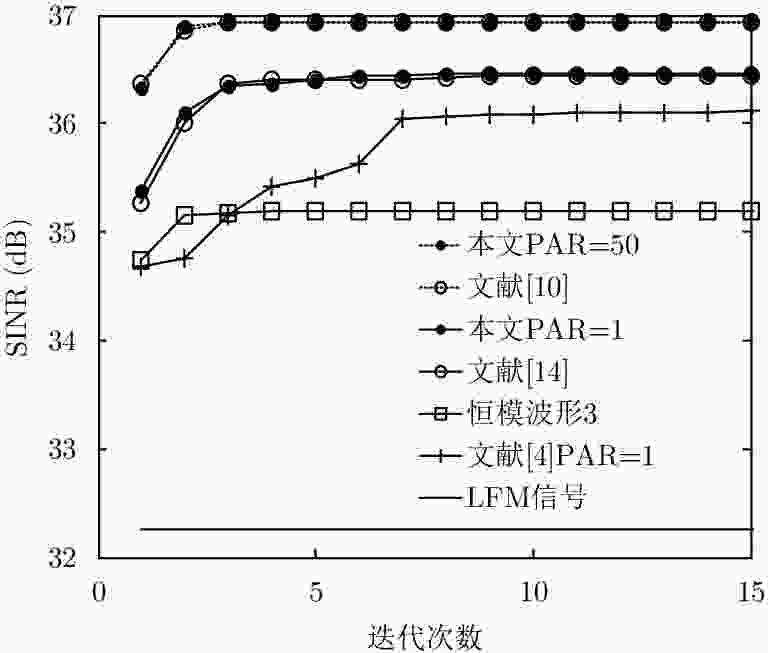
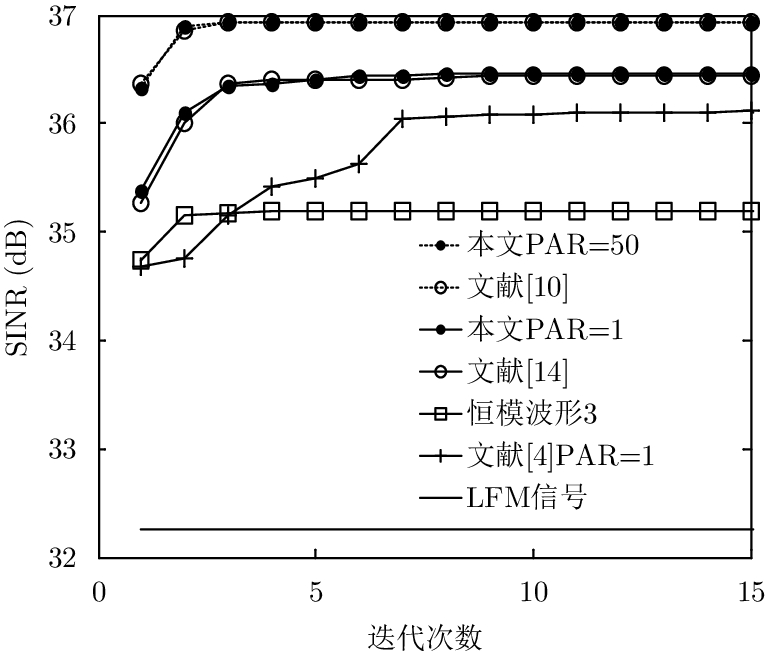
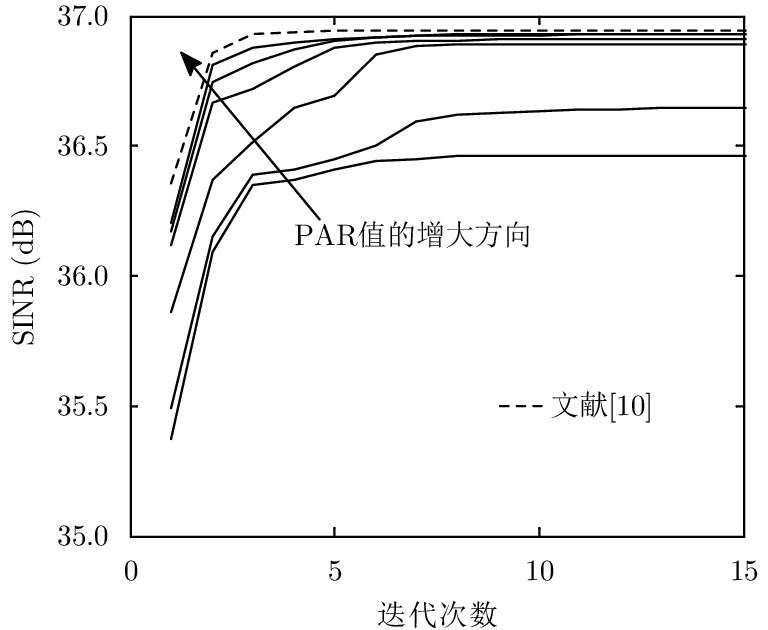
图 4 不同算法信干噪比随着迭代次数变化的曲线
Figure 4. Comparison of the SINR for different algorithms with iterations
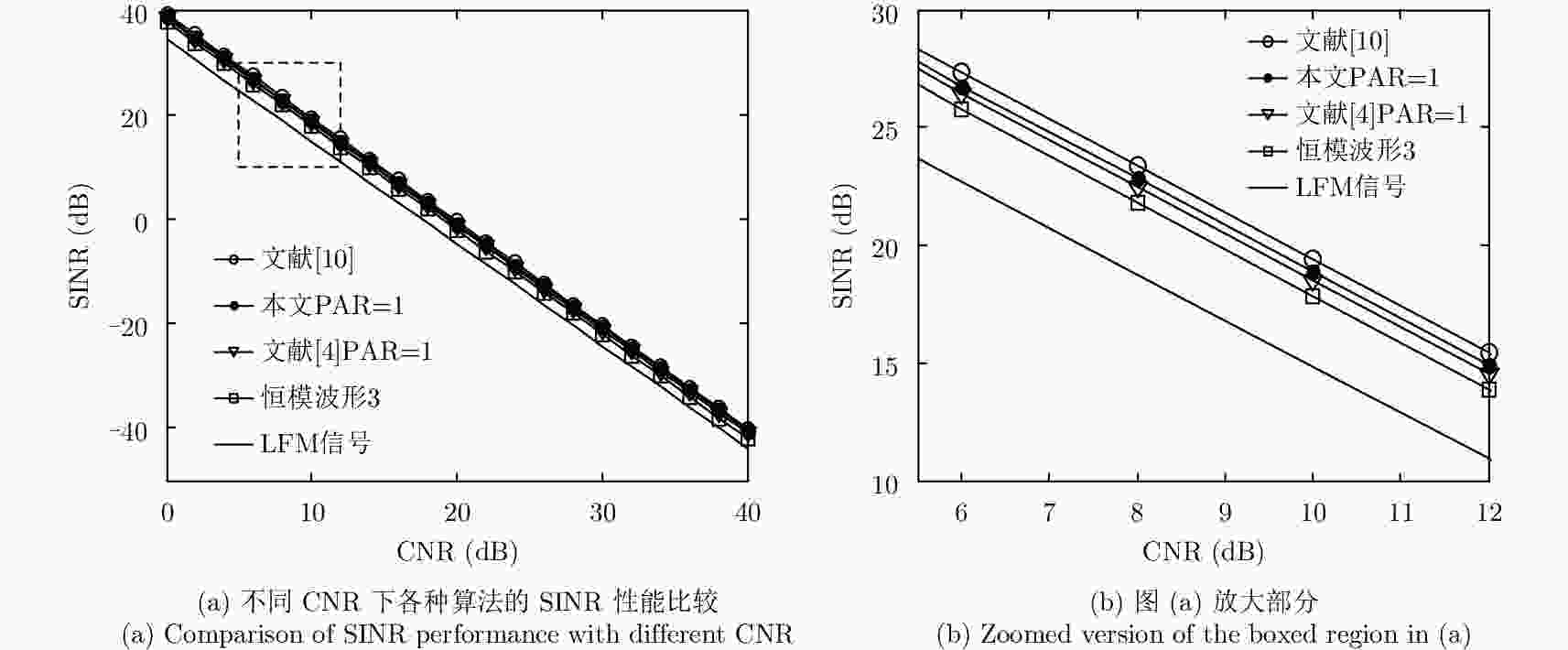
图 5 不同算法信干噪比随着CNR变化的曲线
Figure 5. Comparison of the SINR for different algorithms with different CNR
-
[1] Haykin S. Cognitive radar: A way of the future[J]. IEEE Signal Processing Magazine, 2006, 23(1): 30–40. DOI: 10.1109/MSP.2006.1593335 [2] Guerci J R. Cognitive Radar: The Knowledge-Aided Fully Adaptive Approach[M]. Norwood, MA: Artech House, Inc., 2010: 13–30 [3] Wang Z J, Babu P, and Palomar D P. Design of PAR-constrained sequences for MIMO channel estimation via majorization-minimization[J]. IEEE Transactions on Signal Processing, 2016, 64(23): 6132–6144. DOI: 10.1109/TSP.2016.2607181 [4] Stoica P, He H, and Li J. Optimization of the receive filter and transmit sequence for active sensing[J]. IEEE Transactions on Signal Processing, 2012, 60(4): 1730–1740. DOI: 10.1109/TSP.2011.2179652 [5] 唐波, 张玉, 李科, 等. 杂波中MIMO雷达恒模波形及接收机联合优化算法研究[J]. 电子学报, 2014, 42(9): 1705–1711. DOI: 10.3969/j.issn.0372-2112.2014.09.007Tang Bo, Zhang Yu, Li Ke, et al. Joint constant-envelope waveform and receiver design for MIMO radar in the presence of clutter[J]. Acta Electronica Sinica, 2014, 42(9): 1705–1711. DOI: 10.3969/j.issn.0372-2112.2014.09.007 [6] 郝天铎, 周青松, 孙从易, 等. 非准确先验知识下认知雷达低峰均比稳健波形设计[J]. 电子与信息学报, 2018, 40(3): 532–540. DOI: 10.11999/JEIT170560Hao Tian-duo, Zhou Qing-song, Sun Cong-yi, et al. Low-PAR robust waveform design for cognitive radar with imprecise prior knowledge[J]. Journal of Electronics&Information Technology, 2018, 40(3): 532–540. DOI: 10.11999/JEIT170560 [7] Sen S. Characterizations of PAPR-constrained radar waveforms for optimal target detection[J]. IEEE Sensors Journal, 2014, 14(5): 1647–1653. DOI: 10.1109/JSEN.2014.2299283 [8] Bell M R. Information theory and radar waveform design[J]. IEEE Transactions on Information Theory, 1993, 39(5): 1578–1597. DOI: 10.1109/18.259642 [9] Tang B and Tang J. Robust waveform design of wideband cognitive radar for extended target detection[C]. IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 3096–3100. DOI: 10.1109/ICASSP.2016.7472247 [10] Chen C Y and Vaidyanathan P P. MIMO radar waveform optimization with prior information of the extended target and clutter[J]. IEEE Transactions on Signal Processing, 2009, 57(9): 3533–3544. DOI: 10.1109/TSP.2009.2021632 [11] Chen X X, Deng X B, and Hao Z M. Waveform design for extended target detection under a peak to average power ratio constraint[C]. Proceedings of 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–4. DOI: 10.1109/RADAR.2016.8059566 [12] Tang Y H, Zhang Y D, Amin M G, et al. Wideband multiple-input multiple-output radar waveform design with low peak-to-average ratio constraint[J]. IET Radar,Sonar&Navigation, 2016, 10(2): 325–332. DOI: 10.1049/iet-rsn.2015.0189 [13] Gorji A A and Adve R S. Waveform optimization for random-phase radar signals with PAPR constraints[C]. IEEE International Radar Conference, Lille, France, 2014: 1–5. DOI: 10.1109/RADAR.2014.7060340 [14] Yue W Z, Zhang Y, Liu Y M, et al. Radar constant-modulus waveform design with prior information of the extended target and clutter[J]. Sensors, 2016, 16(6): 889. DOI: 10.3390/s16060889 [15] 唐波. 宽带认知雷达低峰均比波形快速设计算法[J]. 航空学报, 2016, 37(2): 688–694. DOI: 10.7527/S1000-6893.2015.0125Tang B. Efficient design algorithm of low PAR waveform for wideband cognitive radar[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 688–694. DOI: 10.7527/S1000-6893.2015.0125 [16] Romero R A, Bae J, and Goodman N A. Theory and application of SNR and mutual information matched illumination waveforms[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 912–927. DOI: 10.1109/TAES.2011.5751234 [17] Chen P, Qi C H, Wu L N, et al. Estimation of extended targets based on compressed sensing in cognitive radar system[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 941–951. DOI: 10.1109/TVT.2016.2565518 [18] 邹鲲, 廖桂生, 李军. 复合高斯杂波中知识辅助检测器的先验信息感知方法[J]. 中国科学: 信息科学, 2014, 44(8): 993–1003. DOI: 10.1360/N112013-00116Zou Kun, Liao Gui-sheng, and Li Jun. Prior information cognitive method for knowledge aided detector in compound Gaussian clutter[J]. Scientia Sinica Informationis, 2014, 44(8): 993–1003. DOI: 10.1360/N112013-00116 [19] 张贤达. 矩阵分析与应用[M]. 第2版, 北京: 清华大学出版社, 2013: 447–450Zhang Xian-da. Matrix Analysis and Application[M]. Second Edition, Beijing: Tsinghua University Press, 2013: 447–450 [20] Luo Z Q, Ma W K, So A M C, et al. Semidefinite relaxation of quadratic optimization problems[J]. IEEE Signal Processing Magazine, 2010, 27(3): 20–34. DOI: 10.1109/MSP.2010.936019 [21] Yue W Z, Zhang Y, and Xie J W. Radar constant-modulus waveform design for multiple extended targets[J]. IEICE Transactions on Fundamentals of Electronics,Communications and Computer Sciences, 2017, E100-A(3): 888–892. DOI: 10.1587/transfun.E100.A.888 [22] Grant M and Boyd S. CVX: Matlab software for disciplined convex programming (Web page and software) 2008[EB/OL]. http://cvxr.com/cvx/ [23] Leshem A, Naparstek O, and Nehorai A. Information theoretic adaptive radar waveform design for multiple extended targets[J]. IEEE Journal of Selected Topics in Signal Processing, 2007, 1(1): 42–55. DOI: 10.1109/JSTSP.2007.897047 [24] Yang Y and Blum R S. MIMO radar waveform design based on mutual information and minimum mean-square error estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(1): 330–343. DOI: 10.1109/TAES.2007.357137 -

 下载:
下载:



图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

