
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Radar Multi-target Tracking Algorithm Based on Gaussian Mixture PHD Filter under Doppler Blind Zone
-
摘要: 在多普勒雷达目标跟踪过程中,由于多普勒盲区(DBZ)的存在使得跟踪问题更为复杂。针对该问题,该文基于高斯混合概率假设密度(GM-PHD)提出了一种适用于多普勒盲区的多目标跟踪算法。该算法在常规检测概率模型中引入最小可检测速度(MDV)信息,并将该检测概率模型应用于传统GM-PHD更新方程中,推导出多普勒盲区下的GM-PHD更新方程。蒙特卡罗仿真实验结果表明:与只有多普勒量测信息的传统GM-PHD算法相比,新算法在较小的MDV条件下能够明显提高雷达对运动目标的跟踪性能。
-
关键词:
- 多普勒盲区 /
- 最小可检测速度 /
- 多普勒信息 /
- 高斯混合概率假设密度
Abstract: Due to the Doppler Blind Zone (DBZ), the target tracking of Doppler radar becomes more and more complicated. In this paper, a multi-target tracking algorithm based on Gaussian Mixture Probability Hypothesis Density (GM-PHD) for DBZ is proposed. The algorithm introduces the Minimum Detectable Velocity (MDV) information to the traditional detection probability model to update the GM-PHD and the updated equation of the GM-PHD is deduced. The simulation results show that, compared to the traditional GM-PHD with the only Doppler measurement, the proposed algorithm improves greatly the radar tracking performance of moving target under the condition of minor MDV. -

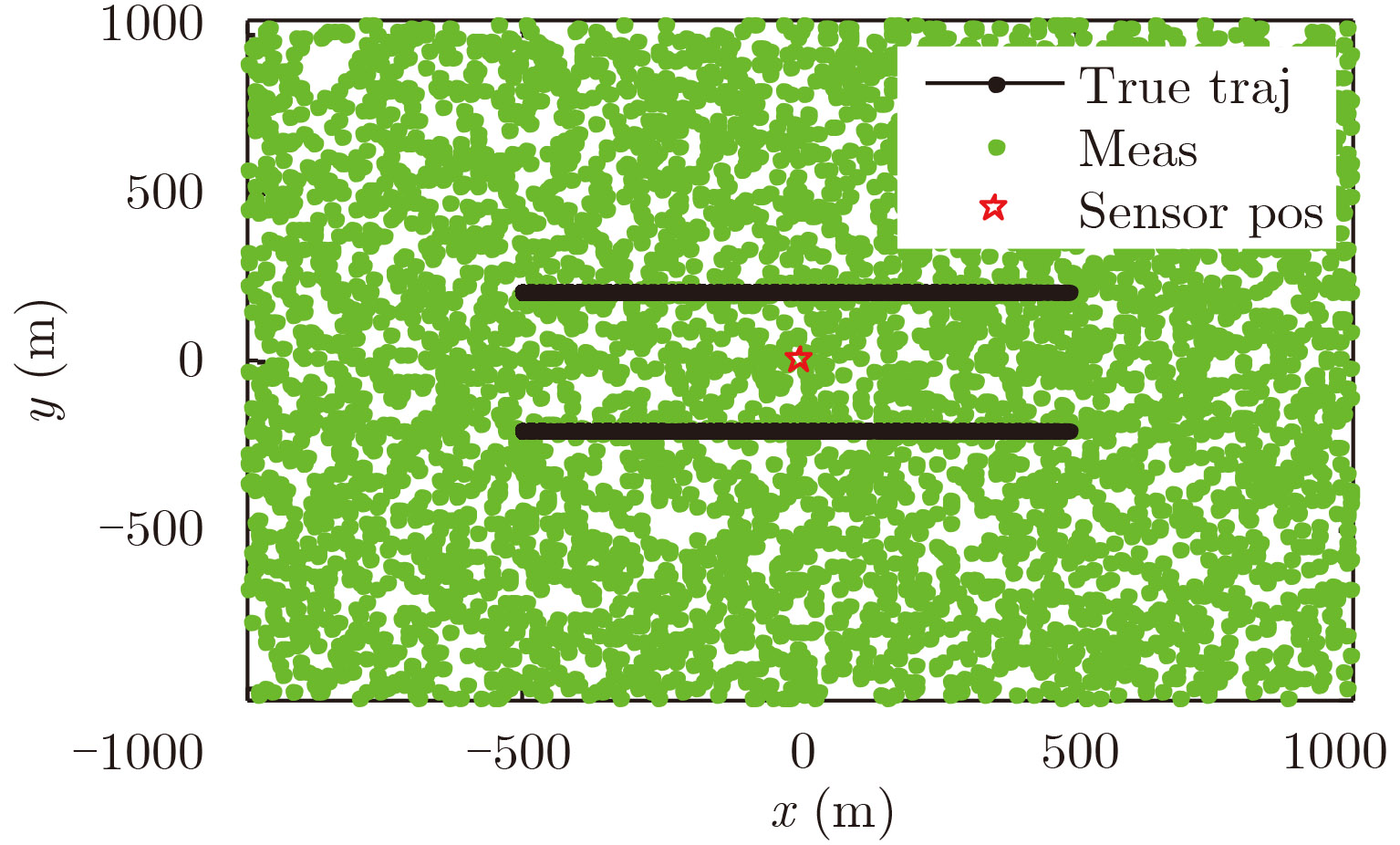
图 1 传感器/目标几何杂波率为12.6×10–6时杂波分布
Figure 1. Sensor/target clutter distribution when the geometric clutter rate is 12.6×10–6

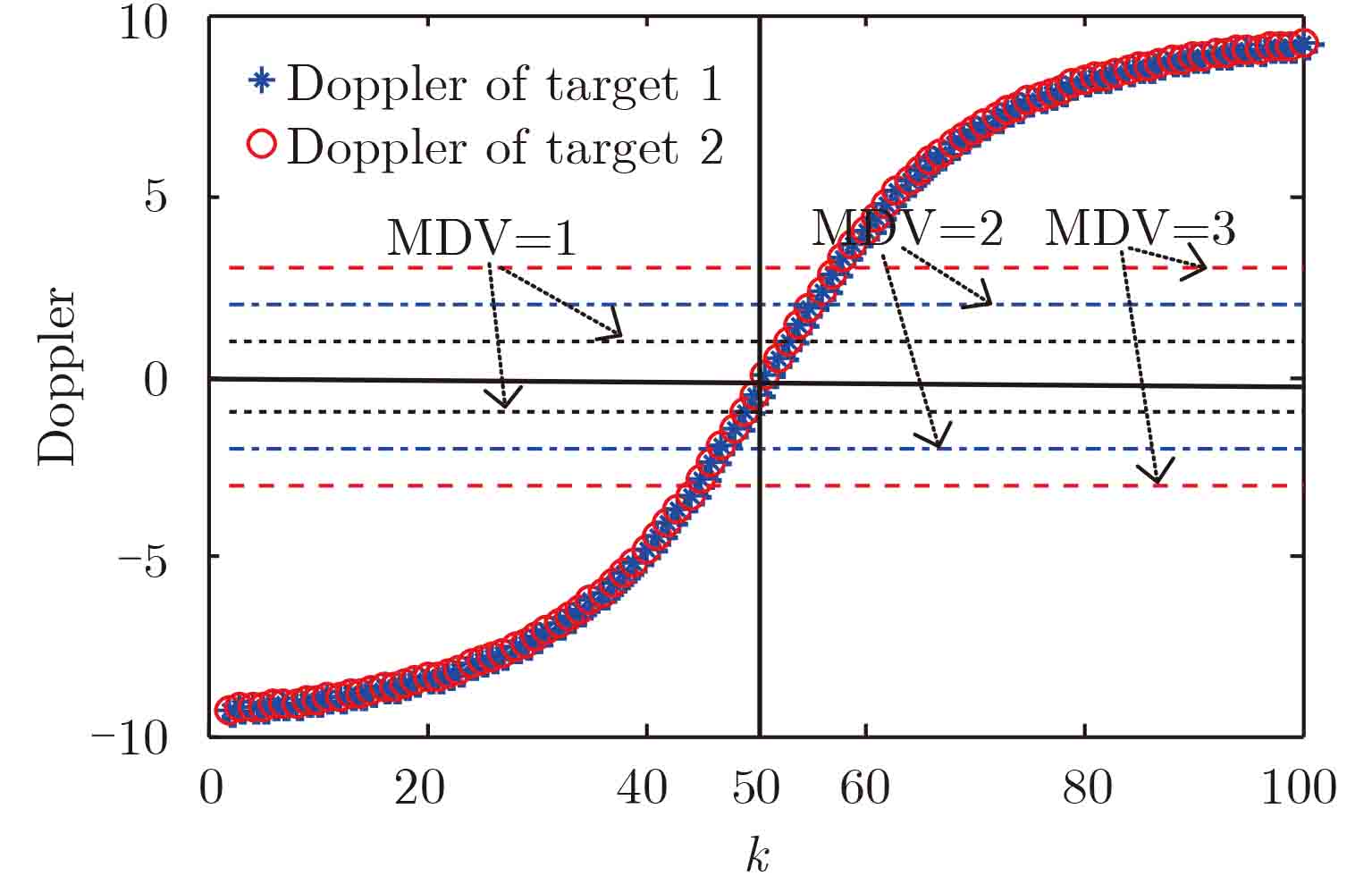
图 2 两目标的多普勒与不同的MDVs的时间关系
Figure 2. The relationship of two goals Doppler with diffierent MDVs

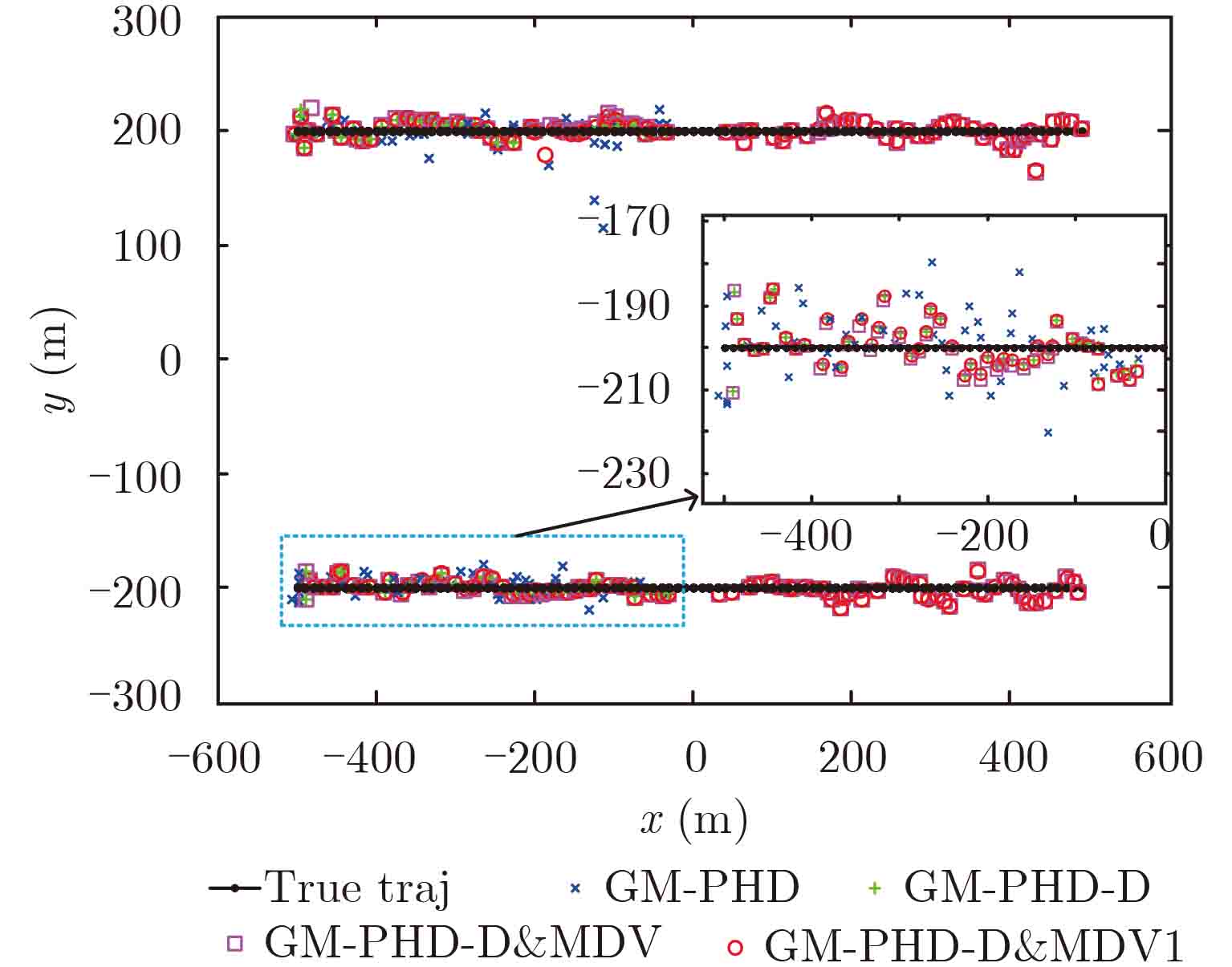
图 3 真实航迹与不同算法的估计(MDV=1)
Figure 3. Real track and estimation of different algorithms (MDV=1)

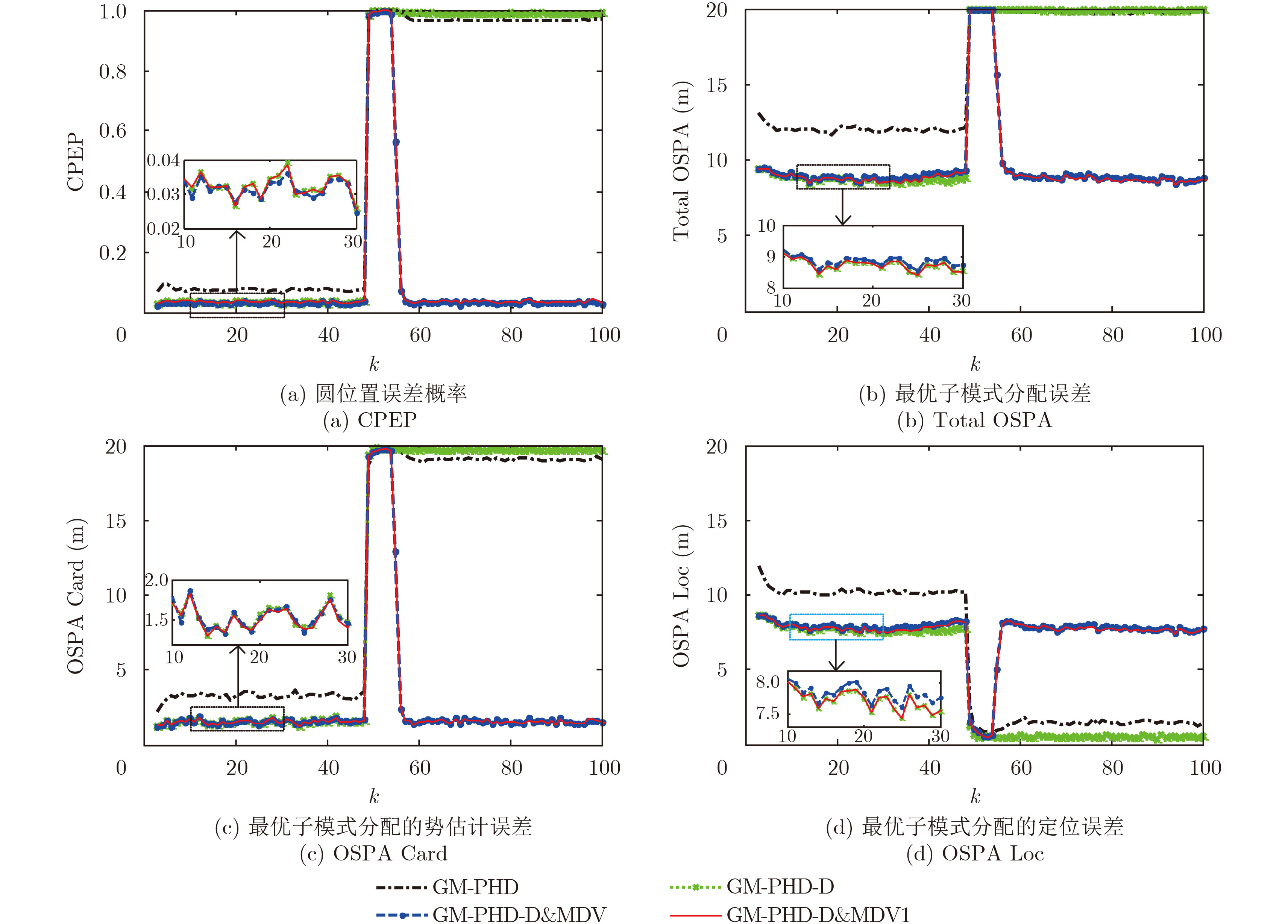
图 4 不同滤波器跟踪性能比较(MDV=1)
Figure 4. Comparison of tracking performance of different fliters (MDV=1)

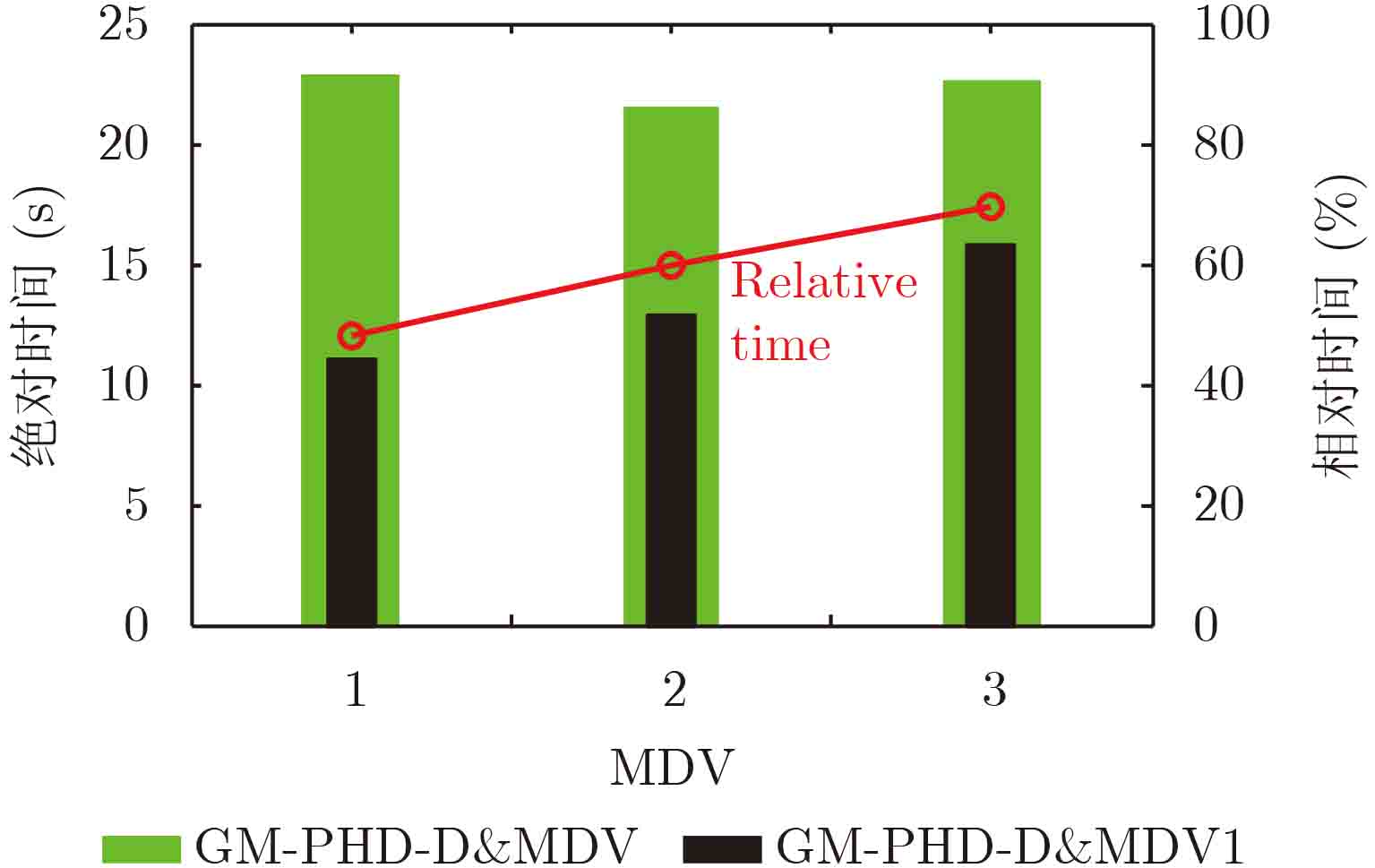
图 5 不同滤波器跟踪性能比较(MDV=3)
Figure 5. Comparison of tracking performance of different fliters (MDV=3)
-
[1] Ronald P S Mahler. Statistical Multisource-Multitarget Information Fusion[M]. Norwood, MA: ARTECH HOUSE, 2007: 45–49. http://www.sfbtr8.spatial-cognition.de/aigaion/index.php/language/set/en/publications/show/1791 [2] 范红旗, 卢大威, 刘本源. 多源多目标统计信息融合[M]. 北京: 国防工业出版社, 2013: 12–16.Fan Hong-qi, Lu Da-wei, and Liu Ben-yuan. Statistical Multisource-Multitarget Information Fusion[M]. Beijing: National Defense Industry Press, 2013: 12–16. [3] Ouyang C, Ji H-B, and Tian Y. Improved Gaussian mixture CPHD tracker for multitarget tracking[J].IEEE Transactions on Signal Processing, 2013, 49(2): 1177–1191. https://www.researchgate.net/publication/258792204_Improved_Gaussian_Mixture_CPHD_Tracker_for_Multitarget_Tracking [4] Beard M, Vo B-T, Vo B-N,et al.. A partially uniform target birth model for Gaussian mixture PHD/CPHD filtering[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4): 2835–2844. doi: 10.1109/TAES.2013.6621859 [5] Beard M, Vo B-T, and Vo B-N. Multitarget filtering with unknown clutter density using a bootstrap GMCPHD filter[J].IEEE Signal Processing Letters, 2013, 20(4): 323–326. doi: 10.1109/LSP.2013.2244594 [6] Ristic B, Clark D, and Gordon N. Calibration of multi-target tracking algorithms using non-cooperative targets[J].IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 390–398. https://pureapps2.hw.ac.uk/portal/en/publications/calibration-of-multitarget-tracking-algorithms-using-noncooperative-targets(86c7223f-af58-4a65-9da4-08f325180a22)/export.html [7] Battistelli G, Chisci L, Fantacci C,et al.. Consensus CPHD filter for distributed multitarget tracking[J].IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 508–520. doi: 10.1109/JSTSP.2013.2250911 [8] Uney M, Clark D, and Julier S. Distributed fusion of PHD filters via exponential mixture densities[J].IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 521–531. doi: 10.1109/JSTSP.2013.2257162 [9] Vo Ba-Tuong, Vo Ba-Ngu, and Cantoni Antonio. The cardinality balanced multi-target multi-bernoulli filter and its implementations[J].IEEE Transactions on Signal Processing, 2009, 57(2): 409–423. doi: 10.1109/TSP.2008.2007924 [10] Vo B-N, Singh S, and Doucet A. Sequential Monte Carlo methods for multi-target filtering with random finite sets[J].IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224–1245. doi: 10.1109/TAES.2005.1561884 [11] Kohlleppel R. Ground moving target tracking of PAMIR detections with a Gaussian mixture-PHD filter[C]. 2011 12th International Radar Symposium, Leipzig, 2011: 193–198. http://ieeexplore.ieee.org/document/6042117/ [12] Kohlleppel R. Ground target tracking with signal adaptive measurement error covariance matrix[C]. 15th IEEE International Conference on Information Fusion, Singapore, 2012: 550–557. http://publica.fraunhofer.de/dokumente/N-249700.html [13] Mallick M, Krishnamurthy V, and Vo B-N. Integrated Tracking, Classification, and Sensor Management[M]. John Wiley & Sons Inc., 2013: 21–23. http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=2524472 [14] Koch W. On exploiting 'negative' sensor evidence for target tracking and sensor data fusion[J].Information Fusion, 2007, 8(1): 28–39. doi: 10.1016/j.inffus.2005.09.002 [15] Ulmke M, Erdinc O, and Willett P. GMTI Tracking via the Gaussian mixture cardinalized probability hypothesis density filter[J].IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 1821–1833. doi: 10.1109/TAES.2010.5595597 [16] Vo B N and Ma W K. The Gaussian mixture probability hypothesis density filter[J].IEEE Transactions on Signal Processing, 2006, 54(11): 4091–4104. doi: 10.1109/TSP.2006.881190 [17] Hu Zijun. A study of multi-target tracking based on random finite set using radar[D]. [Ph.D. dissertation], Xidian University, 2015: 5–9. [18] Vo B T, Vo B N, and Cantoni A. Analytic implementations of the cardinalized probability hypothesis density filter[J].IEEE Transactions on Signal Processing, 2007, 55(7): 3553–3567. doi: 10.1109/TSP.2007.894241 [19] Yoon J H, Kim D Y, Bae S H,et al.. Joint initialization and tracking of multiple moving objects using Doppler information[J].IEEE Transactions on Signal Processing, 2011, 59(7): 3447–3452. doi: 10.1109/TSP.2011.2132720 -

 下载:
下载:

计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

