
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
High-performance Microwave Computational Imaging System Based on Information Metamaterials
-
摘要: 该文深入阐述基于信息超材料的高性能微波计算成像系统架构设计、工作原理与建模分析。首先,利用信息超材料对电磁波优异的调节能力,结合压缩采样理论,重点讨论信息超材料多样杂散波束产生及高性能辐射设计方法。再进一步构建针对高辐射性能信息超材料微波计算成像系统的数值模型,并提出一种高性能色散信息超材料单元,该单元带阻频率捷变特性可覆盖整个X波段。基于该单元设计了一款高透射效率信息超材料透镜,在成像区域内辐射性能较当前超材料孔径提高3倍,辐射效率达到75%。最后基于所构建的数值模型,计算验证所提出的高透射率色散信息超材料透镜对理想散射体的图像还原能力。该文所研究的基于信息超材料的高性能微波计算成像系统,为成像雷达、安防预警、医疗检测等应用提供了坚实的理论依据和前瞻性探索。Abstract: In this paper, we propose a detailed architectural design, principle of operation, and modeling analysis of a high-performance microwave computational imaging system based on information metamaterials. We use the excellent electromagnetic wave manipulation capabilities of information metamaterials, combined with compressive sampling theory, and elaborate the design approaches of stray beam generation and high-performance radiation. Furthermore, we develop a numeric model for describing this imaging system and propose a high-performance frequency-diverse information metamaterial element whose band stop characteristic can cover the X-band. Based on the element, a high-performance information metamaterial lens is designed, which achieved 75% radiation efficiency, which is three times compared with existing metamaterial apertures over the imaging region. Finally, on the basis of the proposed numeric model, we compute and reconstruct ideal scattering objects using the high-performance information metamaterial lens, validating the ability of image restoration. Study on the high-performance microwave computation imaging system in this work laid the foundation for solid theory and prospective exploration, which can be applied for imaging radar, security monitoring, and medical testing.
-
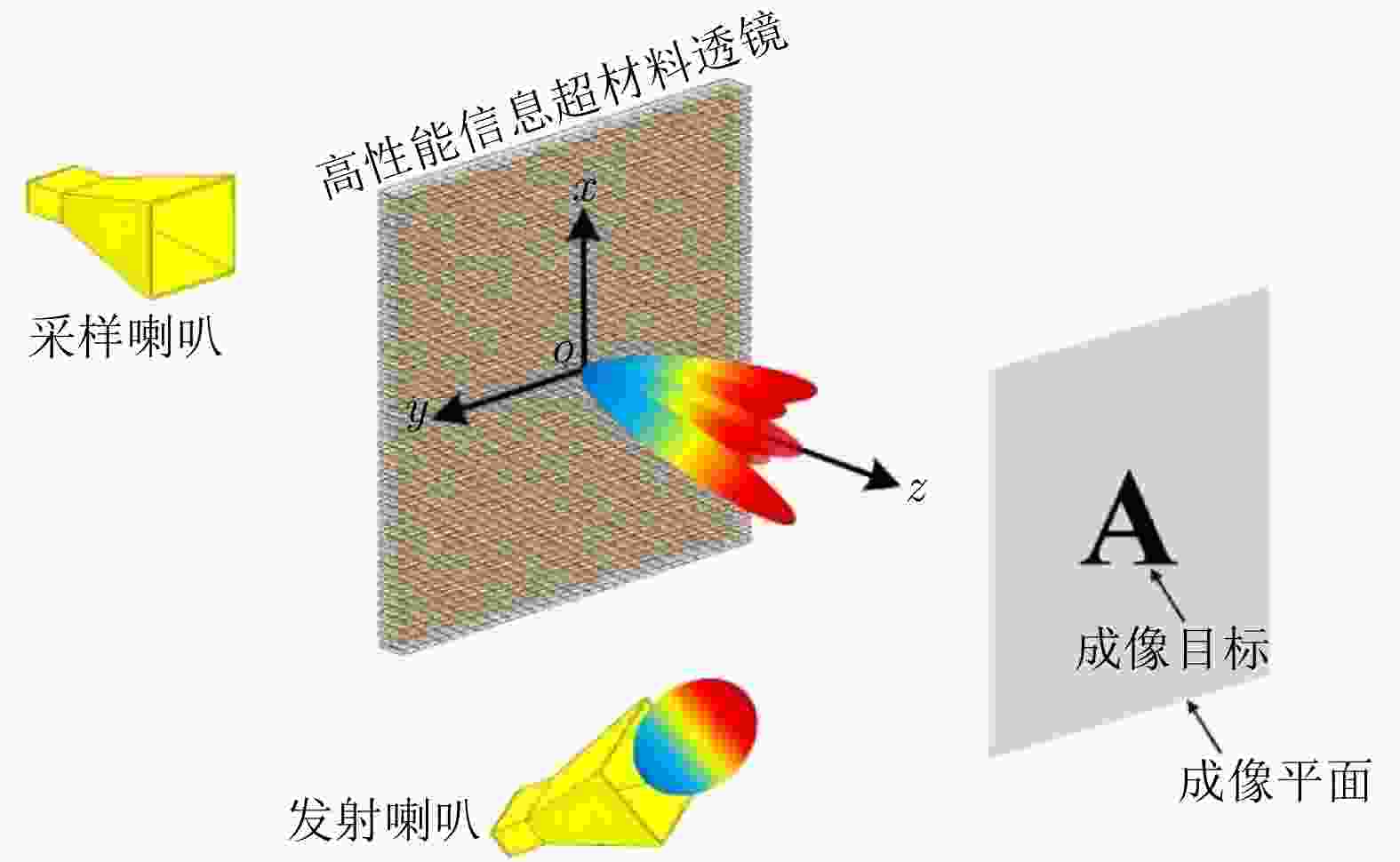
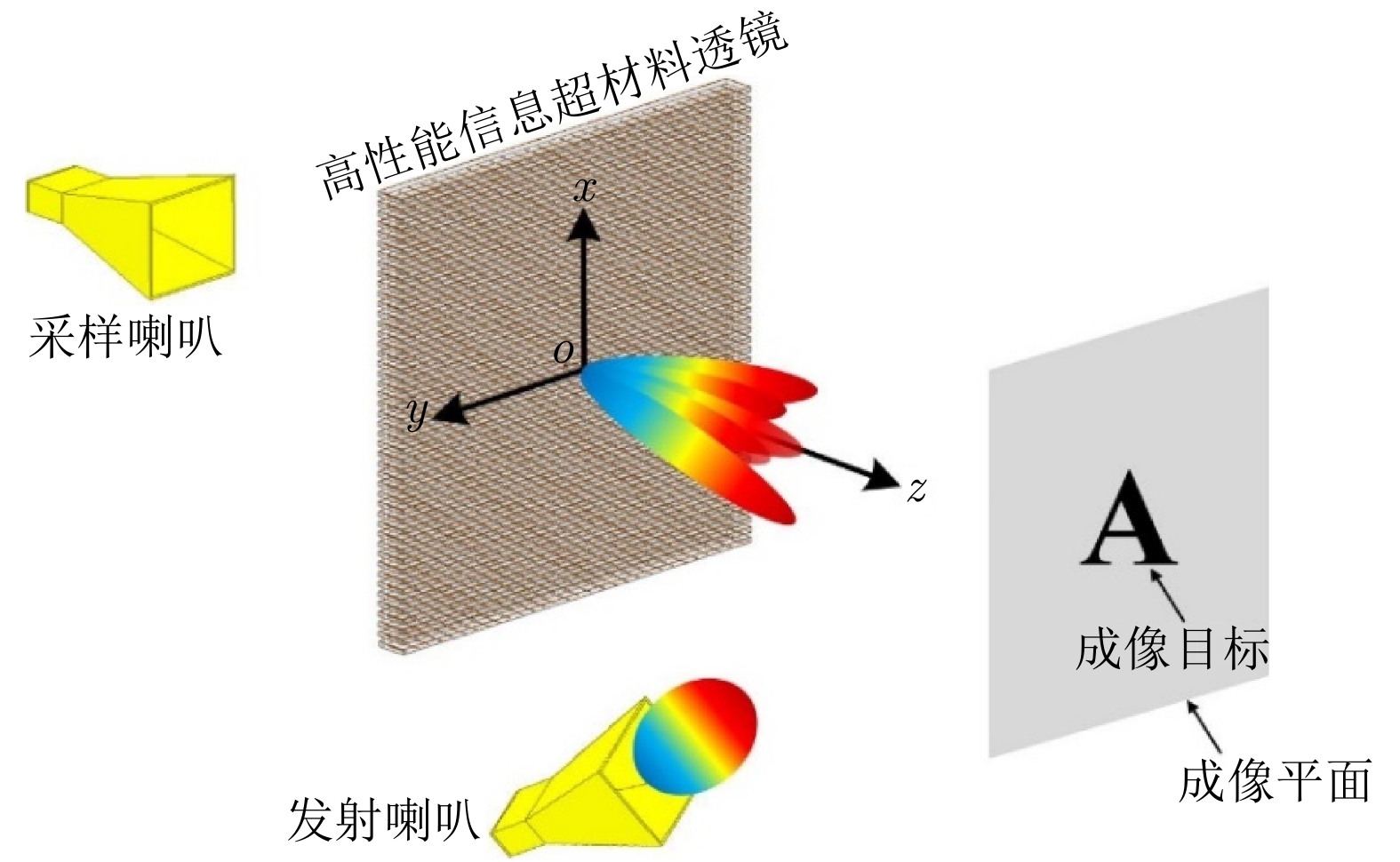
图 1 高性能信息超材料微波计算成像系统方案
Figure 1. High-performance information metamaterial microwave computational imaging system scheme
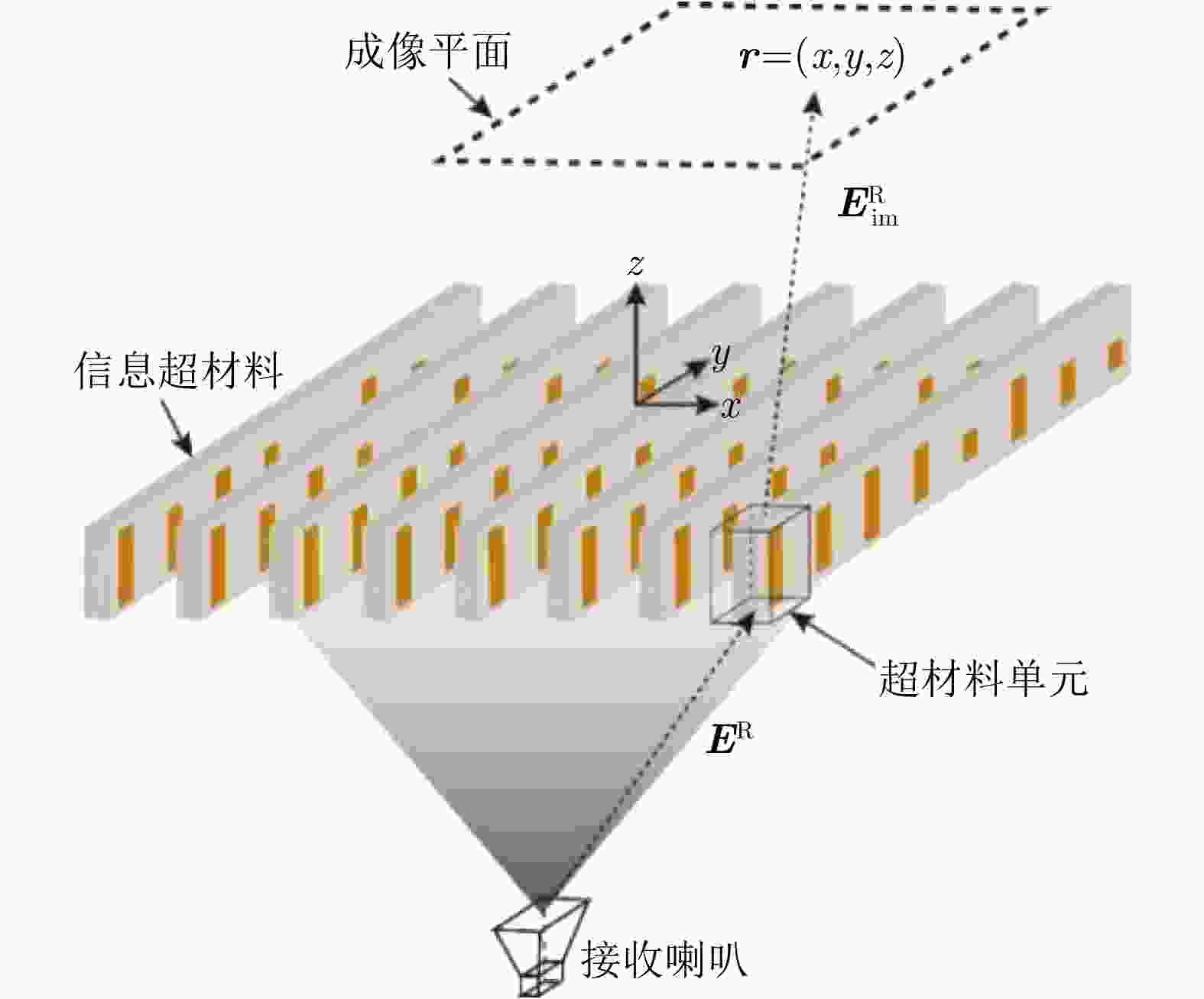
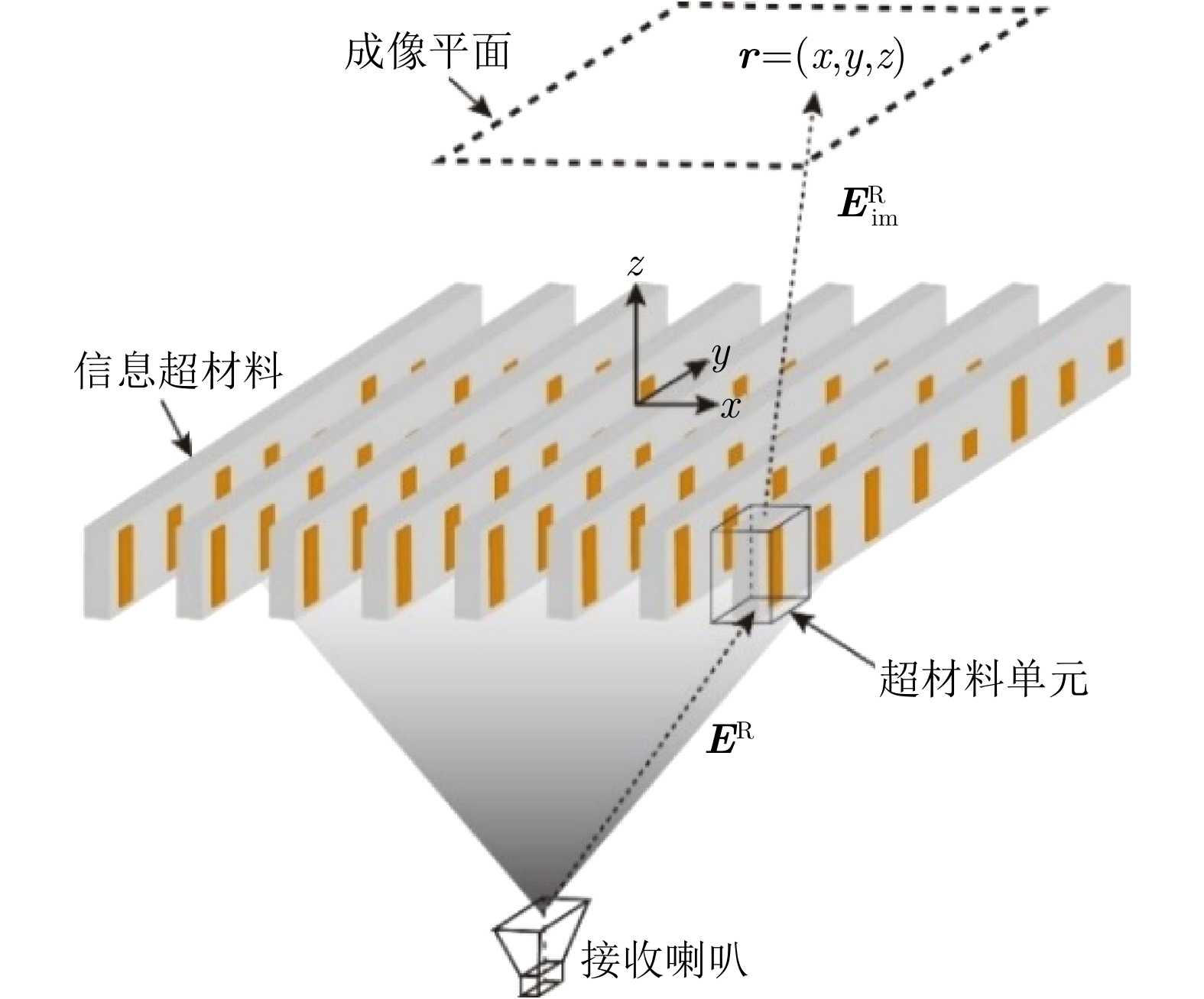
图 2 接收喇叭经过信息超材料到成像平面的场
Figure 2. Field at imaging plane of receiver horn through information metamaterial
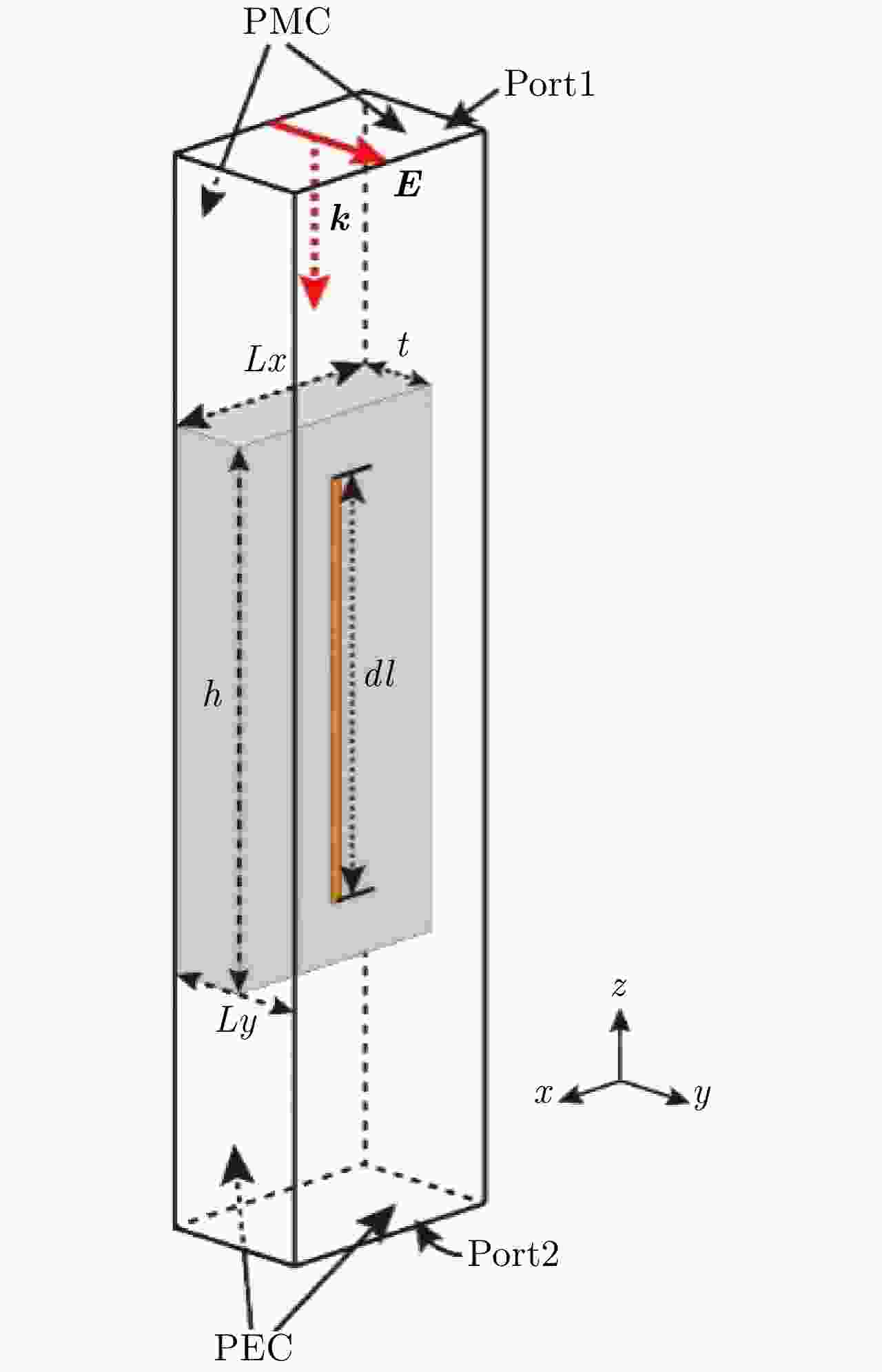
图 3 高透射色散信息超材料单元
Figure 3. High transmission frequency diverse information metamaterial element
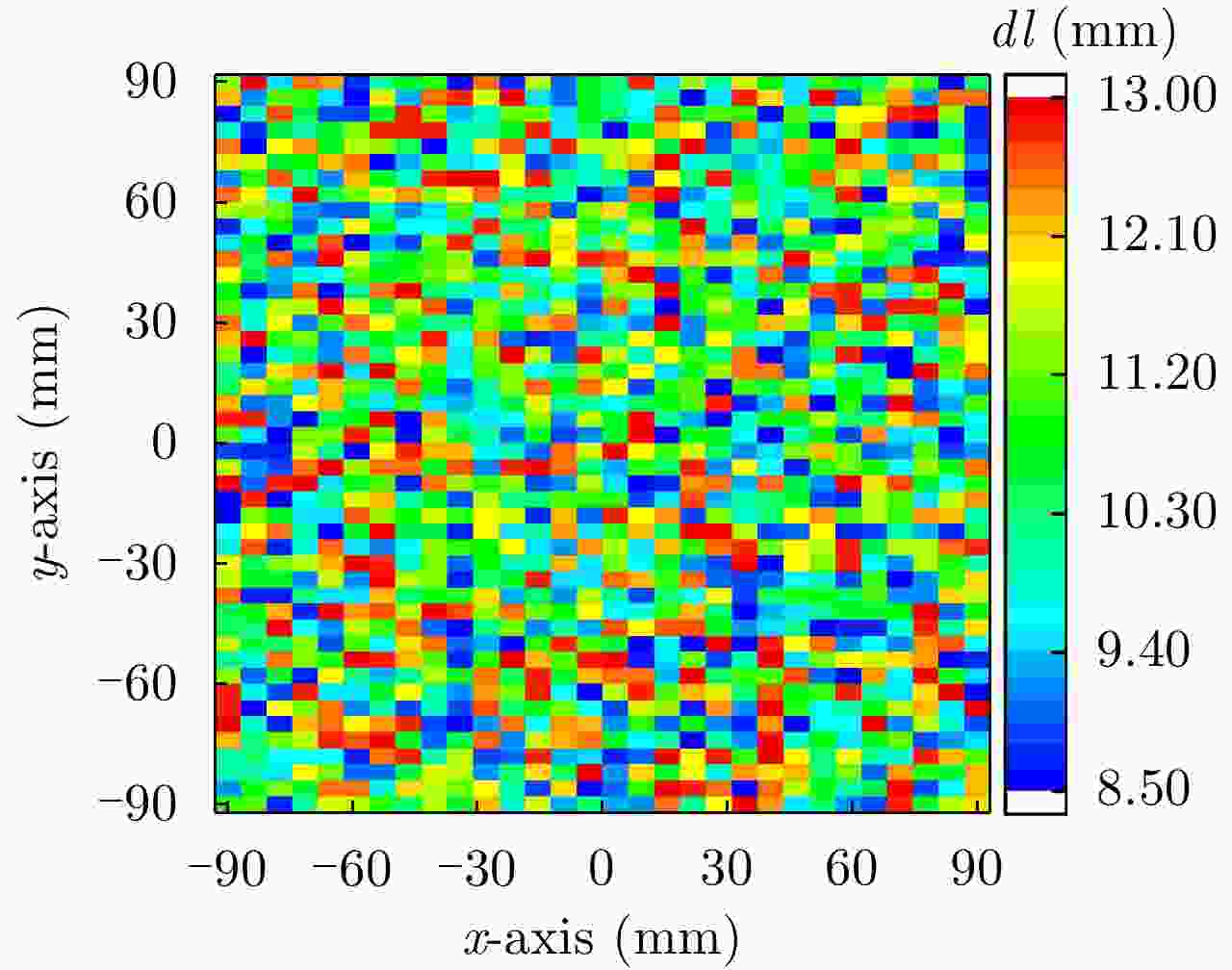
图 6 信息超材料透镜随机金属线长单元分布
Figure 6. Randomly distribution of metallic line elements for information metamaterial lens
-
[1] PATEL V M, MAIT J N, PRATHER D W, et al. Computational millimeter wave imaging: Problems, progress, and prospects[J]. IEEE Signal Processing Magazine, 2016, 33(5): 109–118. doi: 10.1109/MSP.2016.2581206 [2] MAIT J N, WIKNER D A, MIROTZNIK M S, et al. 94-GHz imager with extended depth of field[J]. IEEE Transactions on Antennas and Propagation, 2009, 57(6): 1713–1719. doi: 10.1109/TAP.2009.2019882 [3] MARTIN R, SCHUETZ C A, DILLON T E, et al. Design and performance of a distributed aperture millimeter-wave imaging system using optical upconversion[C]. SPIE 7309, Passive Millimeter-Wave Imaging Technology XII, Orlando, 2009: 730908. doi: 10.1117/12.818858. [4] HUNT J, DRISCOLL T, MROZACK A, et al. Metamaterial apertures for computational imaging[J]. Science, 2013, 339(6117): 310–313. doi: 10.1126/science.1230054 [5] SLEASMAN T, BOYARSKY M, IMANI M F, et al. Design considerations for a dynamic metamaterial aperture for computational imaging at microwave frequencies[J]. Journal of the optical Society of America B, 2016, 33(6): 1098–1111. doi: 10.1364/JOSAB.33.001098 [6] SLEASMAN T, IMANI M F, GOLLUB J N, et al. Dynamic metamaterial aperture for microwave imaging[J]. Applied Physics Letters, 2015, 107(20): 204104. doi: 10.1063/1.4935941 [7] LIPWORTH G, ROSE A, YURDUSEVEN O, et al. Comprehensive simulation platform for a metamaterial imaging system[J]. Applied Optics, 2015, 54(31): 9343–9353. doi: 10.1364/AO.54.009343 [8] 刘峻峰, 刘硕, 傅晓建, 等. 太赫兹信息超材料与超表面[J]. 雷达学报, 2018, 7(1): 46–55. doi: 10.12000/JR17100LIU Junfeng, LIU Shuo, FU Xiaojian, et al. Terahertz information metamaterials and metasurfaces[J]. Journal of Radars, 2018, 7(1): 46–55. doi: 10.12000/JR17100 [9] CUI Tiejun, LIU Shuo, and ZHANG Lei. Information metamaterials and metasurfaces[J]. Journal of Materials Chemistry C, 2017, 5(15): 3644–3668. doi: 10.1039/C7TC00548B [10] LI Lianlin and CUI Tiejun. Information metamaterials–from effective media to real-time information processing systems[J]. Nanophotonics, 2019, 8(5): 703–724. doi: 10.1515/nanoph-2019-0006 [11] CUI Tiejun, LI Lianlin, LIU Shuo, et al. Information metamaterial systems[J]. iScience, 2020, 23(8): 101403. doi: 10.1016/j.isci.2020.101403 [12] HAN Jiaqi, LI Long, TIAN Shuncheng, et al. Millimeter-wave imaging using 1-bit programmable metasurface: Simulation model, design, and experiment[J]. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 2020, 10(1): 52–61. doi: 10.1109/JETCAS.2020.2973466 [13] LI Lianlin, SHUANG Ya, MA Qian, et al. Intelligent metasurface imager and recognizer[J]. Light, Science & Applications, 2019, 8: 97. doi: 10.1038/s41377-019-0209-z [14] LI Lianlin, RUAN Hengxin, LIU Che, et al. Machine-learning reprogrammable metasurface imager[J]. Nature Communications, 2019, 10(1): 1082. doi: 10.1038/s41467-019-09103-2 [15] LI Lianlin, CUI Tiejun, JI Wei, et al. Electromagnetic reprogrammable coding-metasurface holograms[J]. Nature Communications, 2017, 8(1): 197. doi: 10.1038/s41467-017-00164-9 [16] CLARKE R H and BROWN J. Diffraction Theory and Antennas[M]. Chichester: Ellis Horwood, 1980: 85–86. [17] IMANI M F, GOLLUB J N, YURDUSEVEN O, et al. Review of metasurface antennas for computational microwave imaging[J]. IEEE Transactions on Antennas and Propagation, 2020, 68(3): 1860–1875. doi: 10.1109/TAP.2020.2968795 [18] BIOUCAS-DIAS J M and FIGUEIREDO M A T. A new TwIST: Two-step iterative shrinkage/thresholding algorithms for image restoration[J]. IEEE Transactions on Image Processing, 2007, 16(12): 2992–3004. doi: 10.1109/TIP.2007.909319 [19] LIPWORTH G, MROZACK A, HUNT J, et al. Metamaterial apertures for coherent computational imaging on the physical layer[J]. Journal of the Optical Society of America A, Optics, Image Science, and Vision, 2013, 30(8): 1603–1612. doi: 10.1364/JOSAA.30.001603 -

 下载:
下载:




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

