
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Efficient FPGA Acceleration Technique for Hierarchical Detection of High-dynamic Weak Targets
-
摘要: 在空间态势感知体系中,高动态弱目标的精确探测具有重要意义。然而,目标与雷达的高速相对运动会引发距离与多普勒两维跨单元徙动,传统补偿算法计算复杂度较高,现有底层硬件平台的算力难以满足实时处理需求。为此,提出一种高动态弱目标分级探测算法,并设计了相应的现场可编程门阵列(FPGA)加速架构。算法层面,结合目标短时运动特性及LV氏分布(LVD)的参数解耦优势,构建降维Radon-LV氏分布(RLVD)粗估计与局部精细搜索补偿的级联处理策略,在维持相参积累增益的前提下有效降低计算复杂度;硬件层面,以8通道并行RLVD计算核为核心,设计了端到端的实时处理系统。测试结果表明,在200 MHz系统时钟下,系统以8.41 ms 的全流程时延完成了4通道、单帧32×
8192 规模回波数据的实时处理,核心参数解算相对浮点模型的偏差较小,三维定位的最大量化偏差为1.220 m。此外,地基雷达实测数据进一步验证了该架构在实际探测场景中的工程可行性。-
关键词:
- 高动态弱目标 /
- 实时处理 /
- 现场可编程门阵列 /
- 徙动校正 /
- Radon-LV氏分布
Abstract: In space situational awareness systems, accurate detection of high-dynamic weak targets is critical. However, the rapid relative motion between the target and radar causes migration across range and Doppler cells. Moreover, the high computational complexity of traditional compensation algorithms hampers existing hardware platforms in meeting real-time processing demands. To address these challenges, we propose a hierarchical detection algorithm for highly dynamic weak targets paired with a corresponding field programmable gate array acceleration architecture. At the algorithmic level, we develop a cascaded processing strategy that leverages the short-term motion characteristics of the target and the parameter decoupling advantages of the Lv’s Distribution (LVD). This strategy combines coarse estimation through the reduced-dimension Radon-LVD (RLVD) with local fine-search compensation, effectively reducing computational complexity while preserving coherent integration gain. At the hardware level, an end-to-end real-time processing system is designed, centered around an 8-channel parallel RLVD computation kernel. Experimental results demonstrate that operating under a 200 MHz system clock, the system achieves real-time processing of 4-channel, single-frame 32 ×8192 echo data within an 8.41 ms full-pipeline latency. Core parameter estimation exhibits minor deviations compared to the floating-point model, with a maximum 3D positioning quantization deviation of 1.220 m. In addition, we validate the engineering feasibility of the proposed architecture in practical detection scenarios using real-measured data from a ground-based radar. -
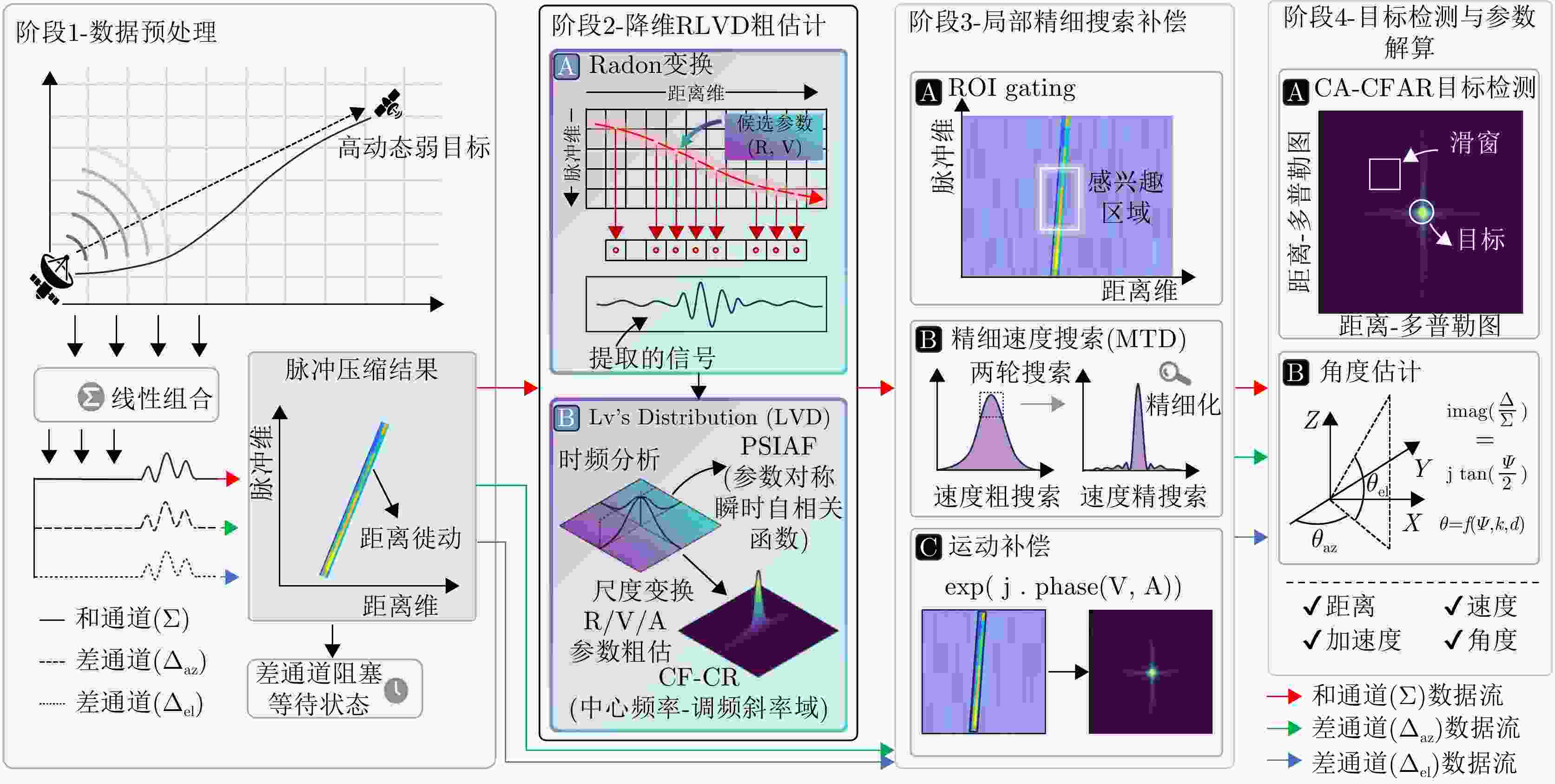
图 1 高动态微弱目标雷达分级探测算法总体架构
Figure 1. Overall architecture of a hierarchical detection algorithm for high-dynamic weak radar targets
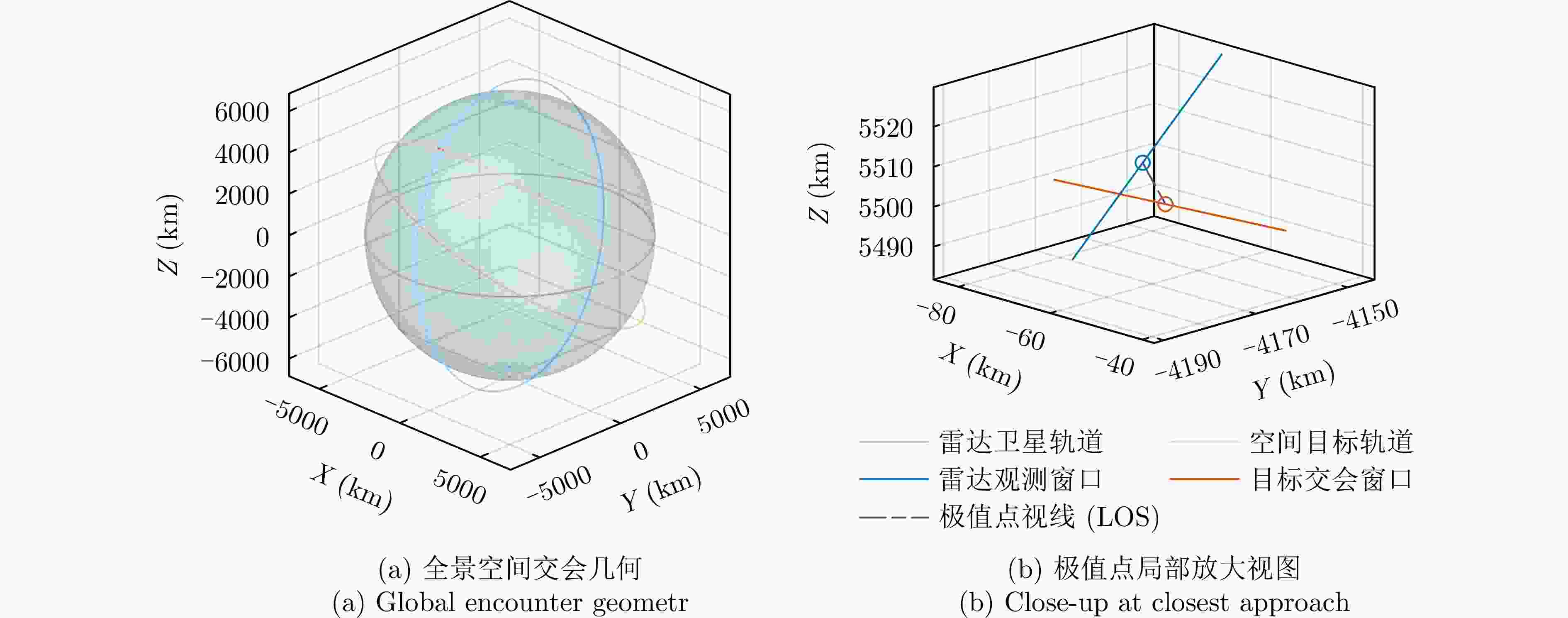
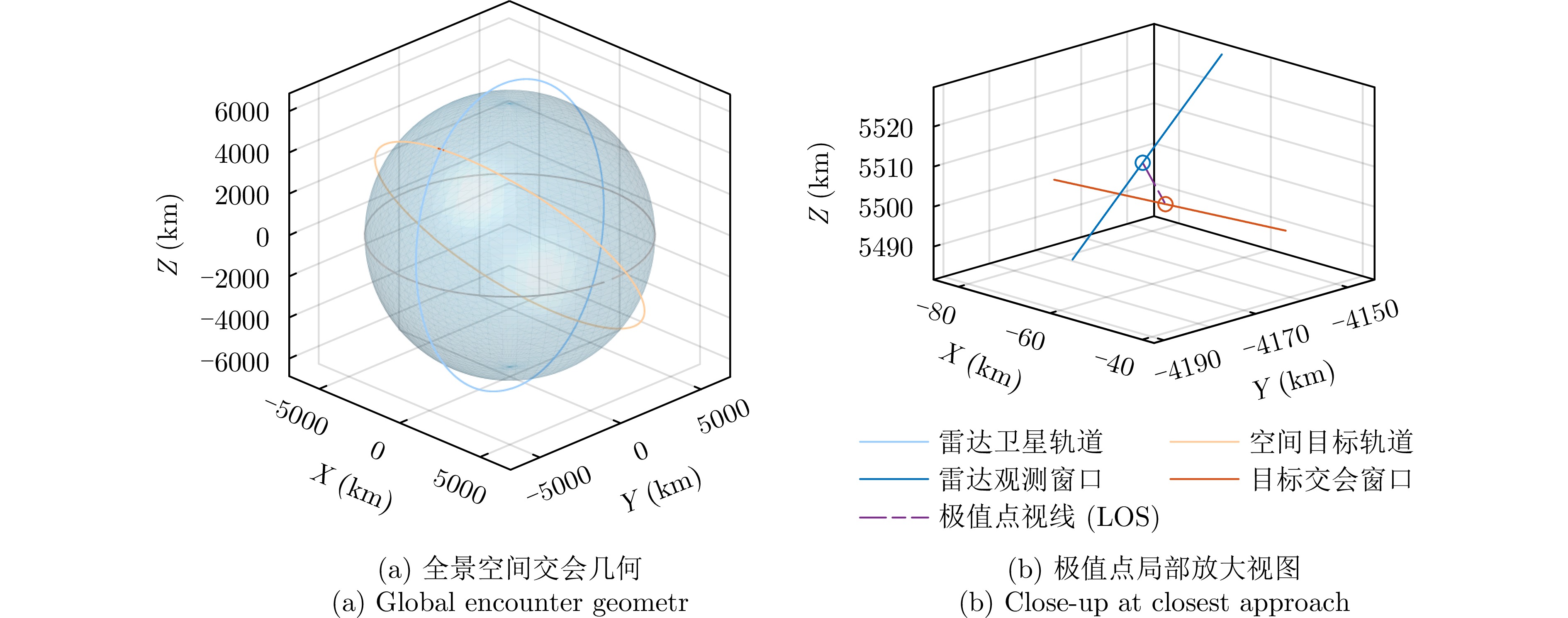
图 2 天基雷达与典型空间目标交会几何
Figure 2. Encounter geometry between a spaceborne radar and a typical space target
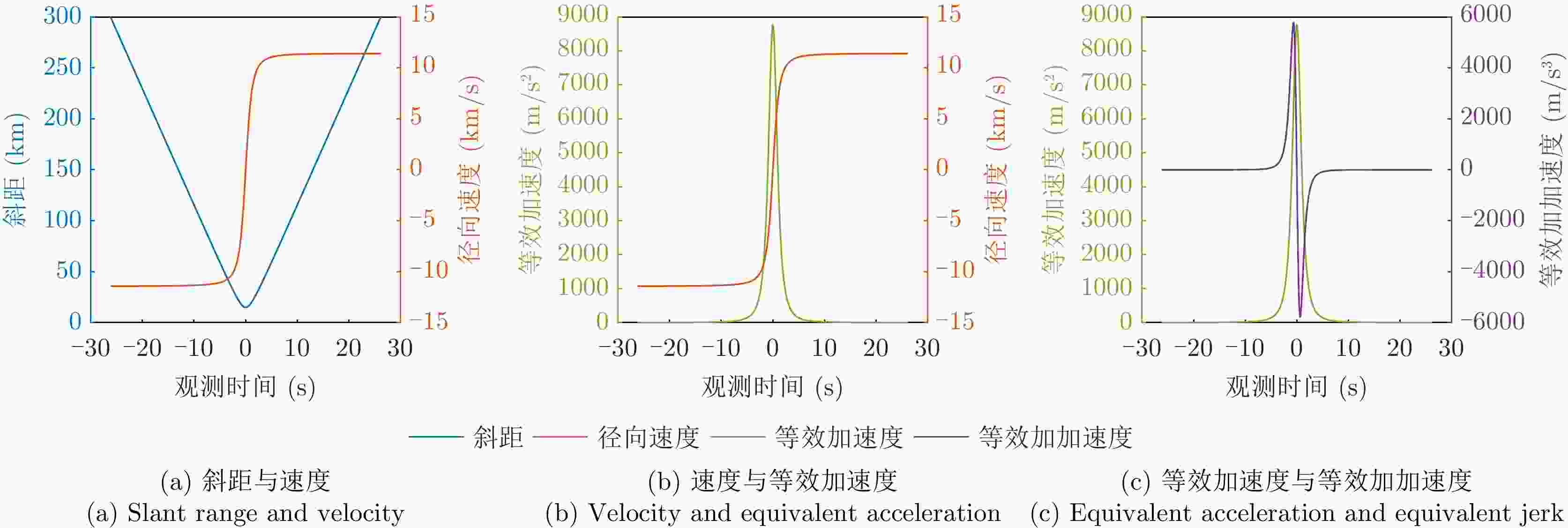
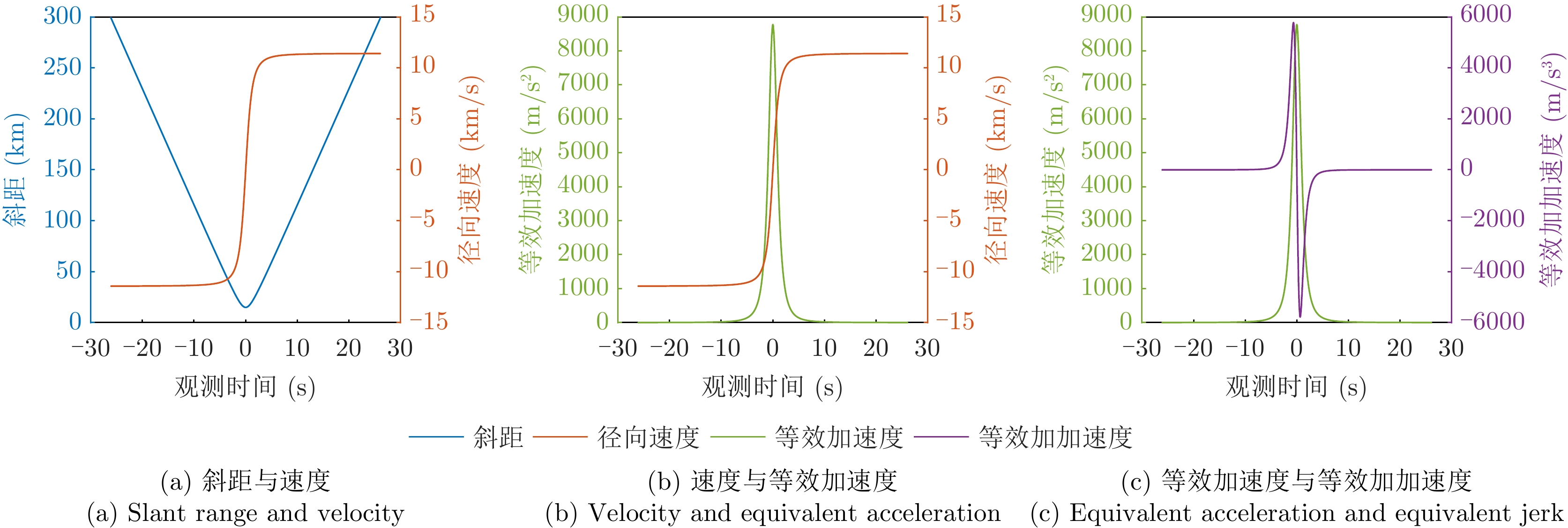
图 3 典型高动态交会场景下径向运动学参数变化规律
Figure 3. Variation characteristics of radial kinematic parameters in typical high-dynamic encounter scenarios
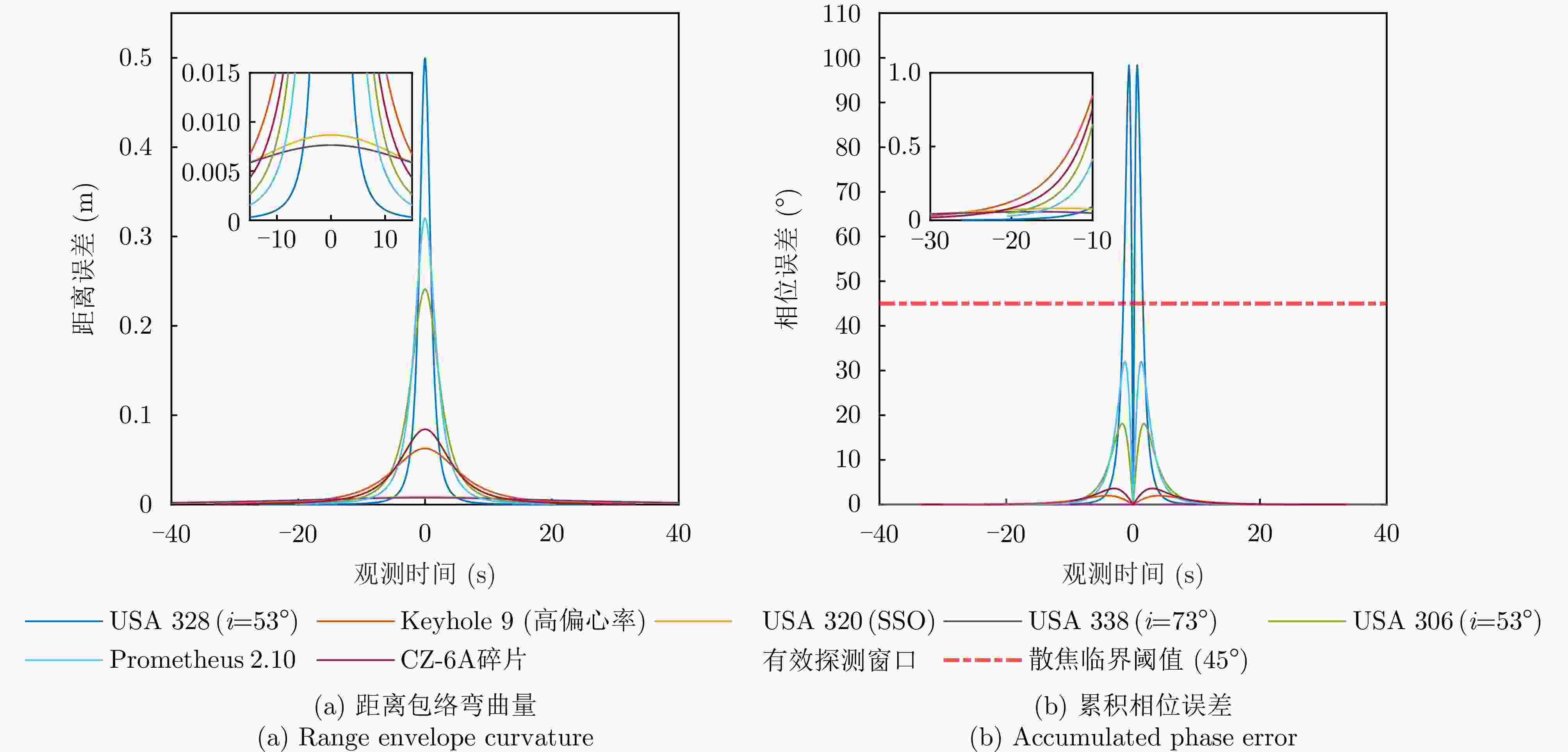
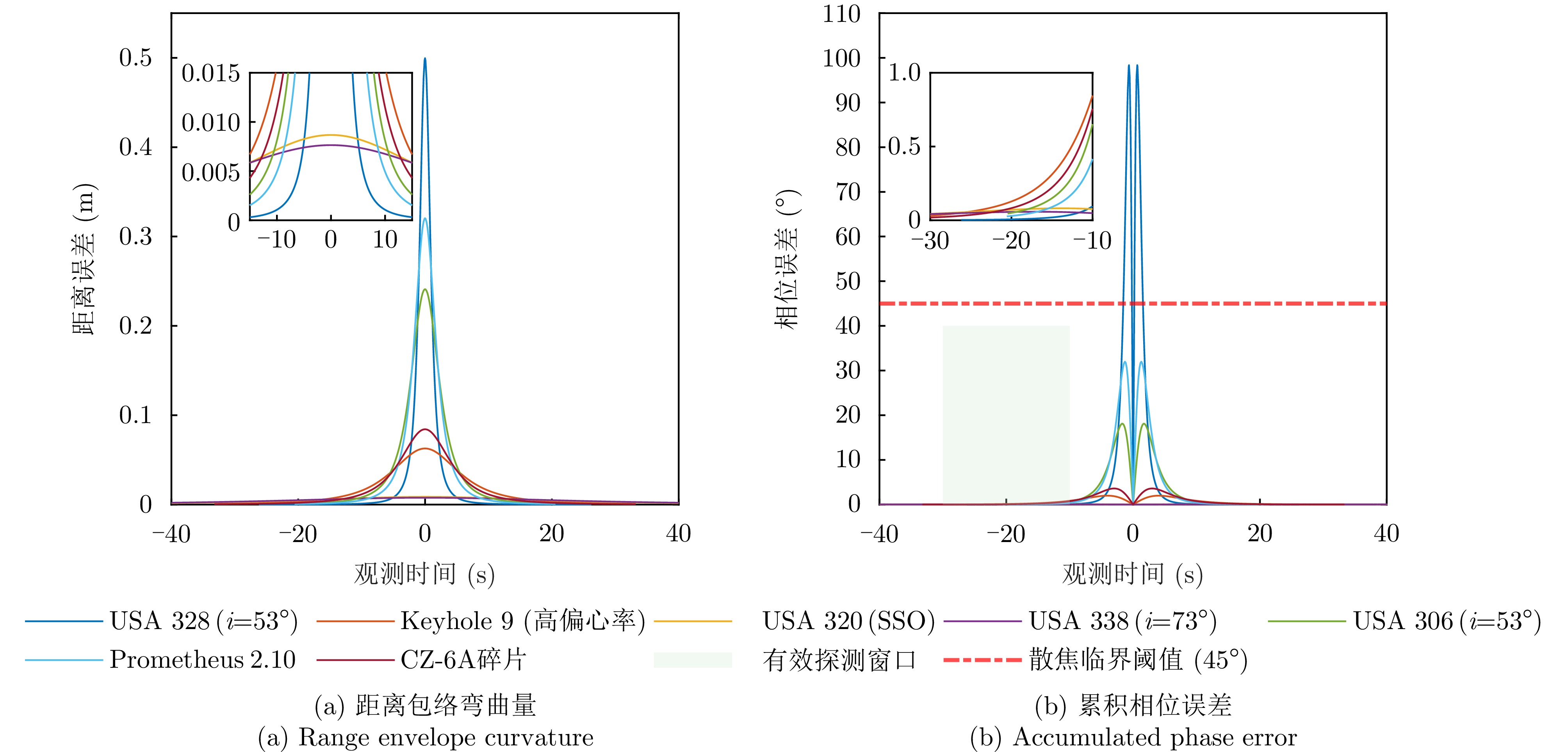
图 4 交会时刻高阶运动引起的误差分析
Figure 4. Error analysis caused by high-order motion during the encounter
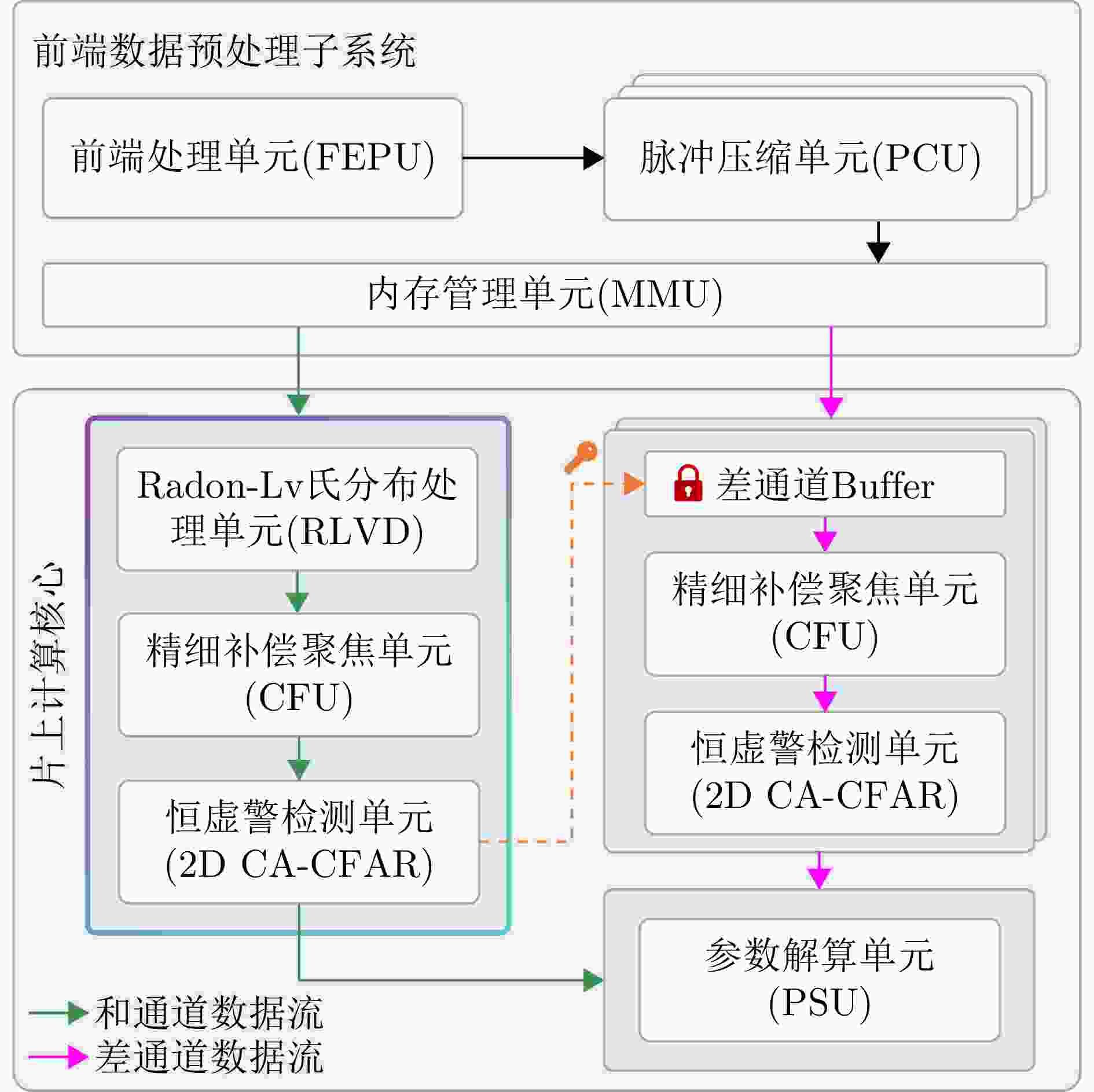
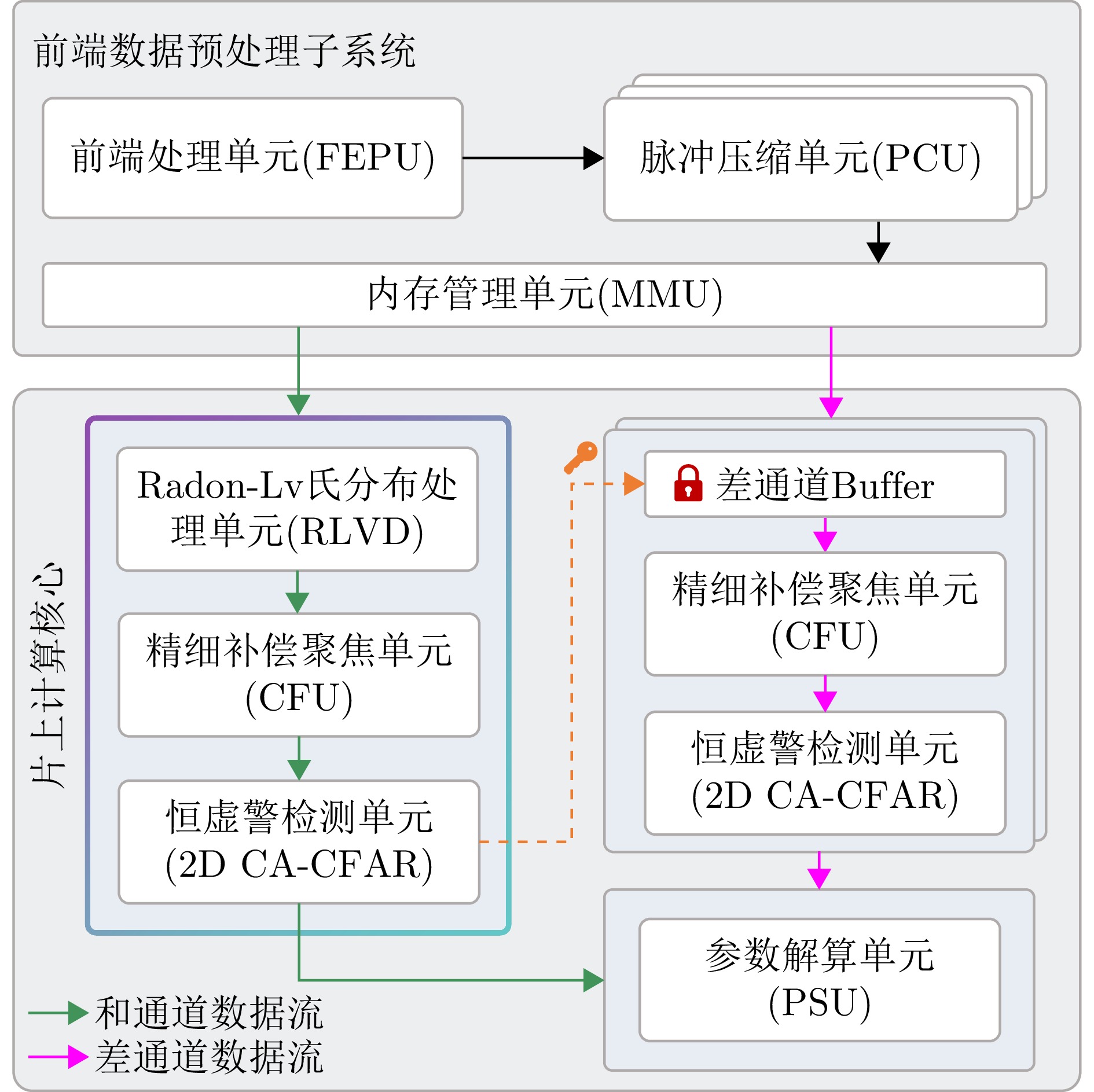
图 5 基于FPGA的实时处理系统硬件架构
Figure 5. Hardware architecture of the FPGA-based real-time processing system
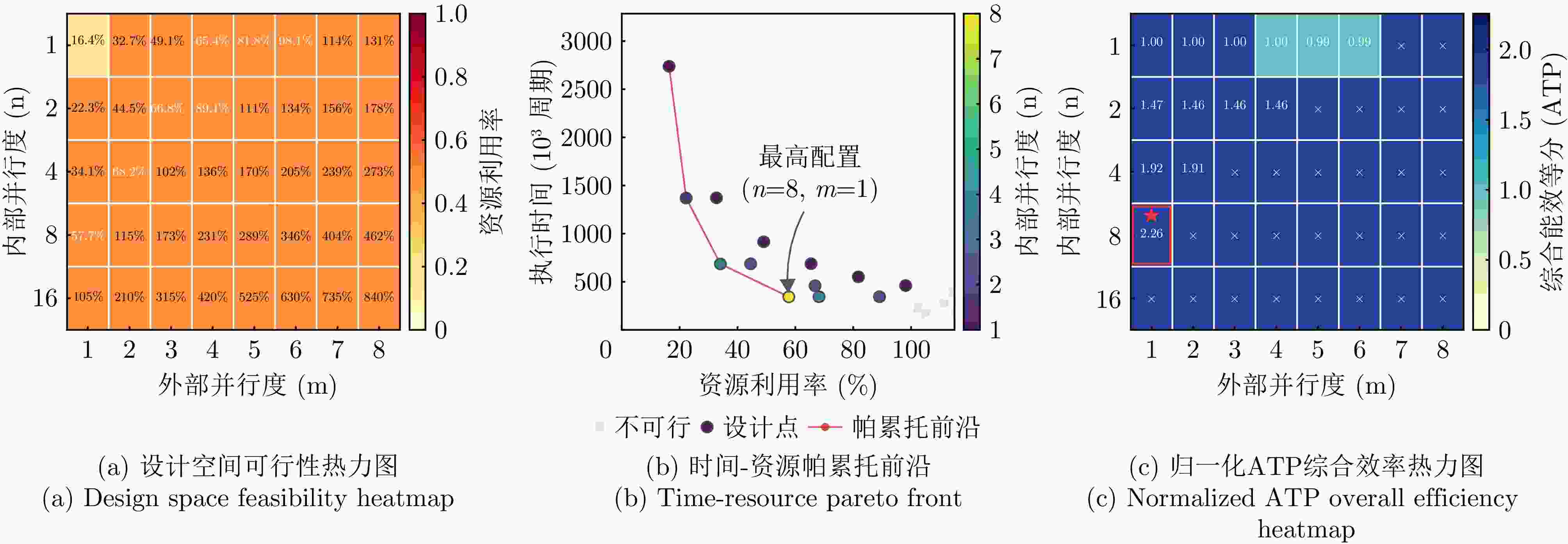
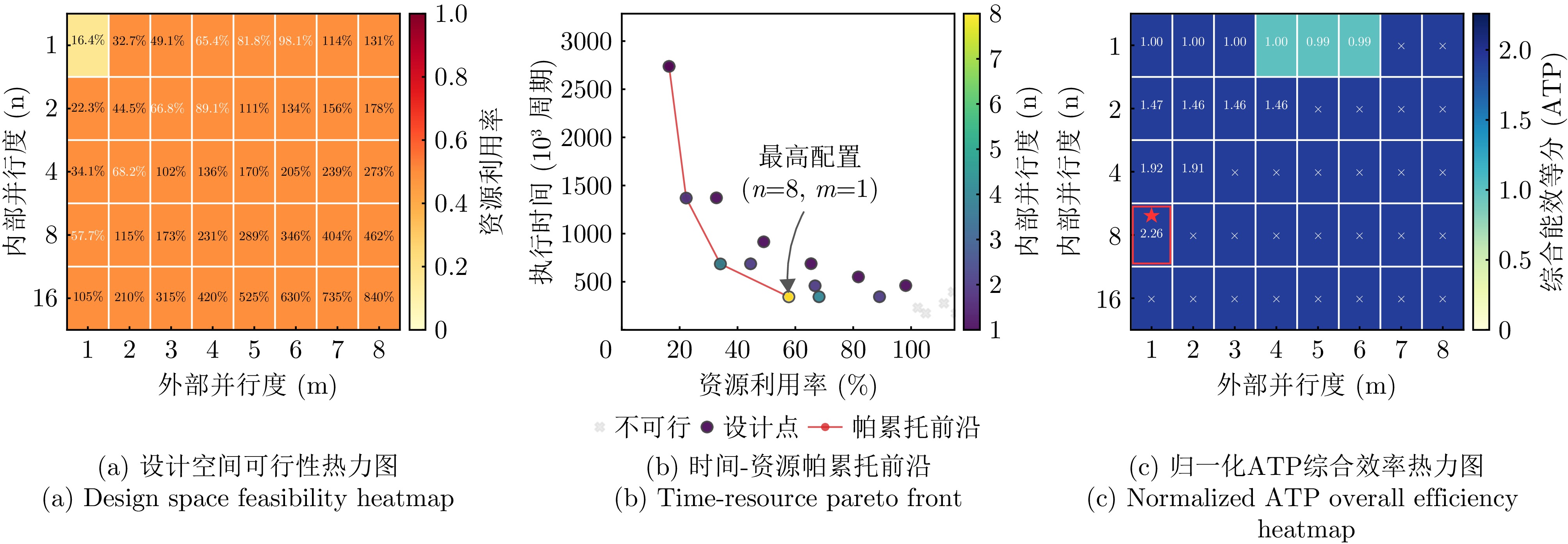
图 7 基于理论解析模型的设计空间评估分析
Figure 7. Evaluation and analysis of design space based on theoretical analytical model

图 8 基于双URAM阵列的无阻塞数据流调度
Figure 8. Non-blocking dataflow scheduling based on dual URAM arrays
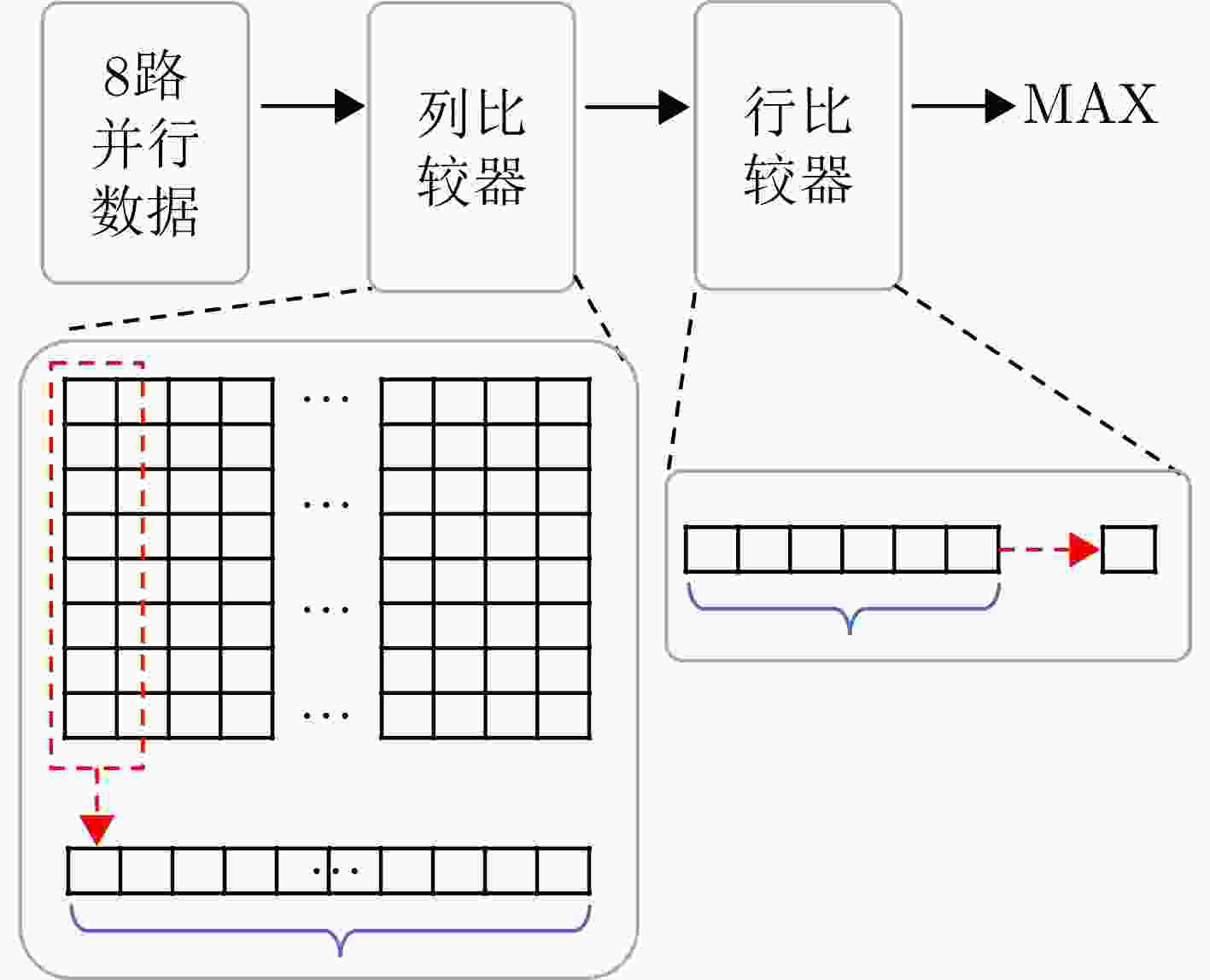
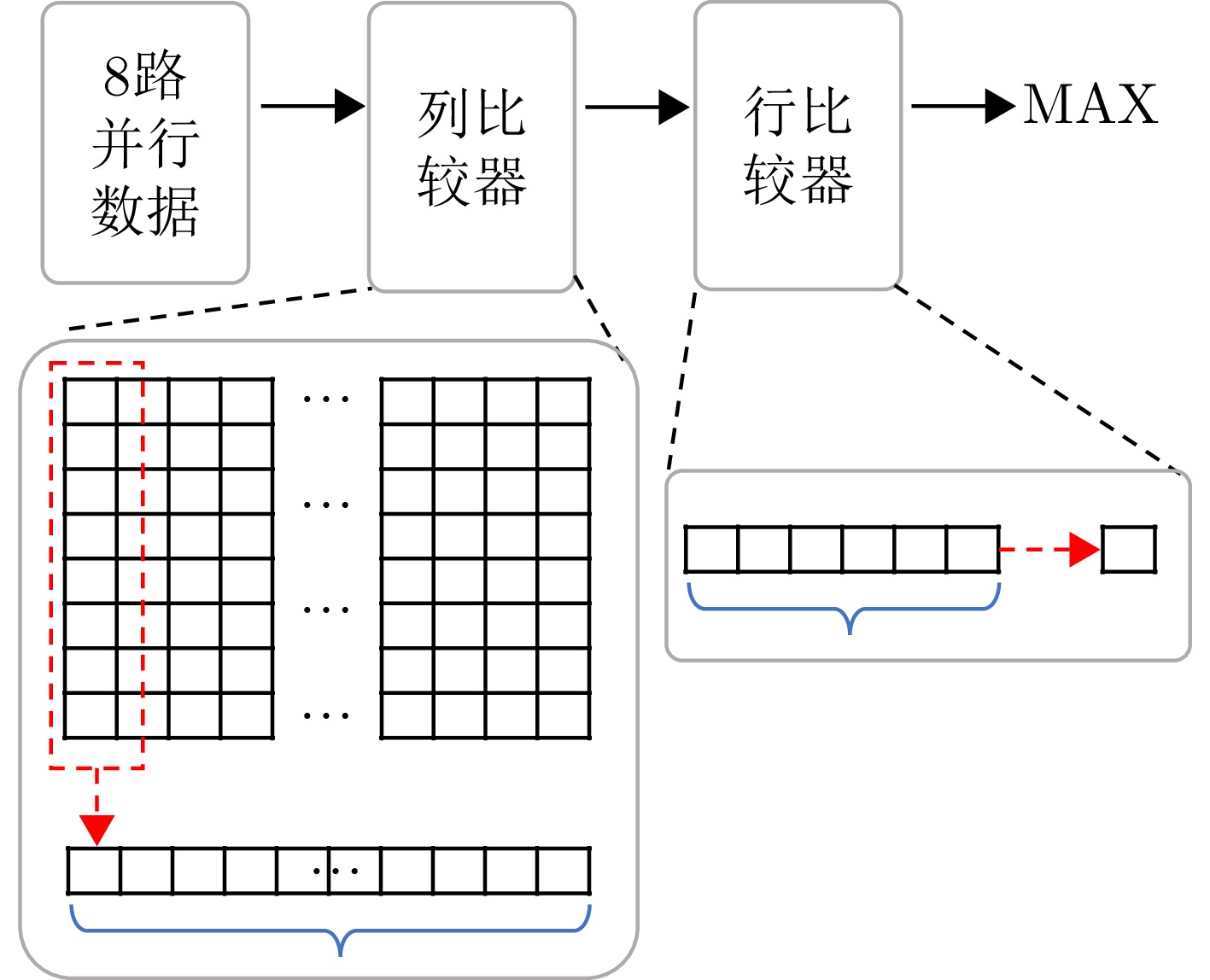
图 11 8 路并行数据最大值提取器结构
Figure 11. Structure of 8-channel parallel data maximum extractor
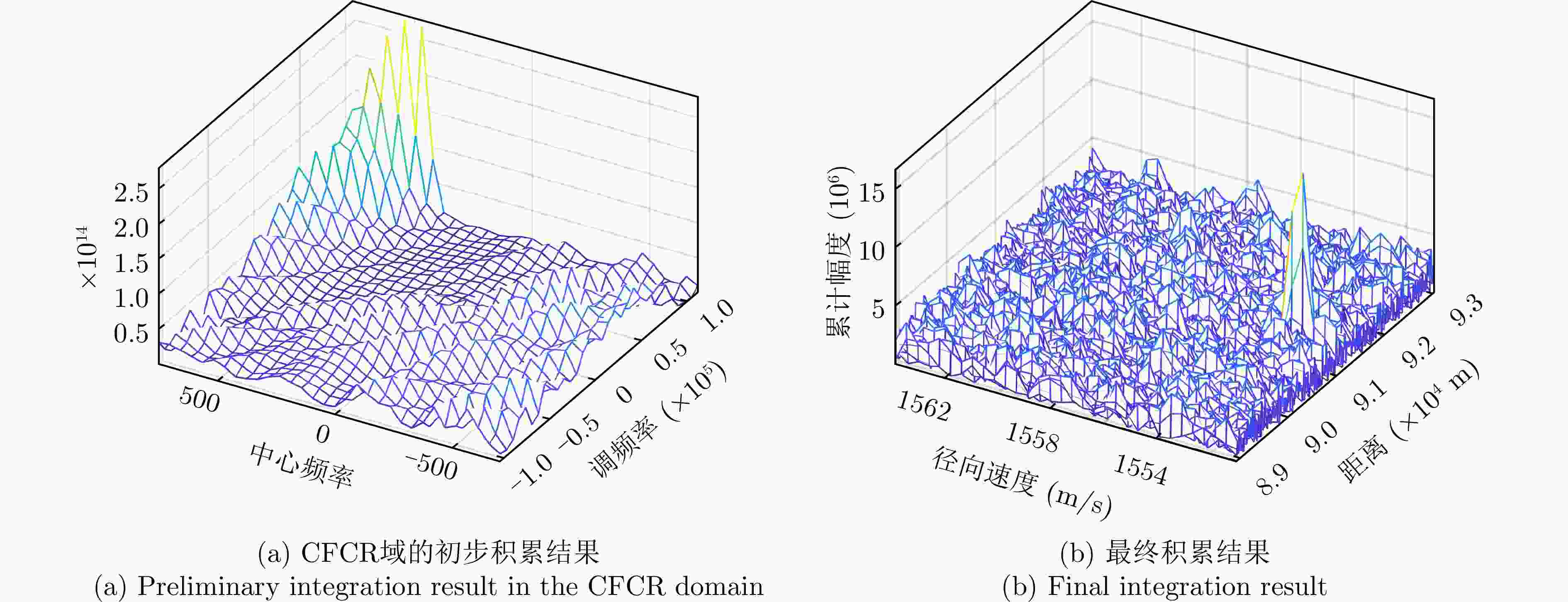
图 14 所提分级处理架构下的目标精细聚焦效果
Figure 14. Target fine focusing results under the proposed hierarchical processing architecture
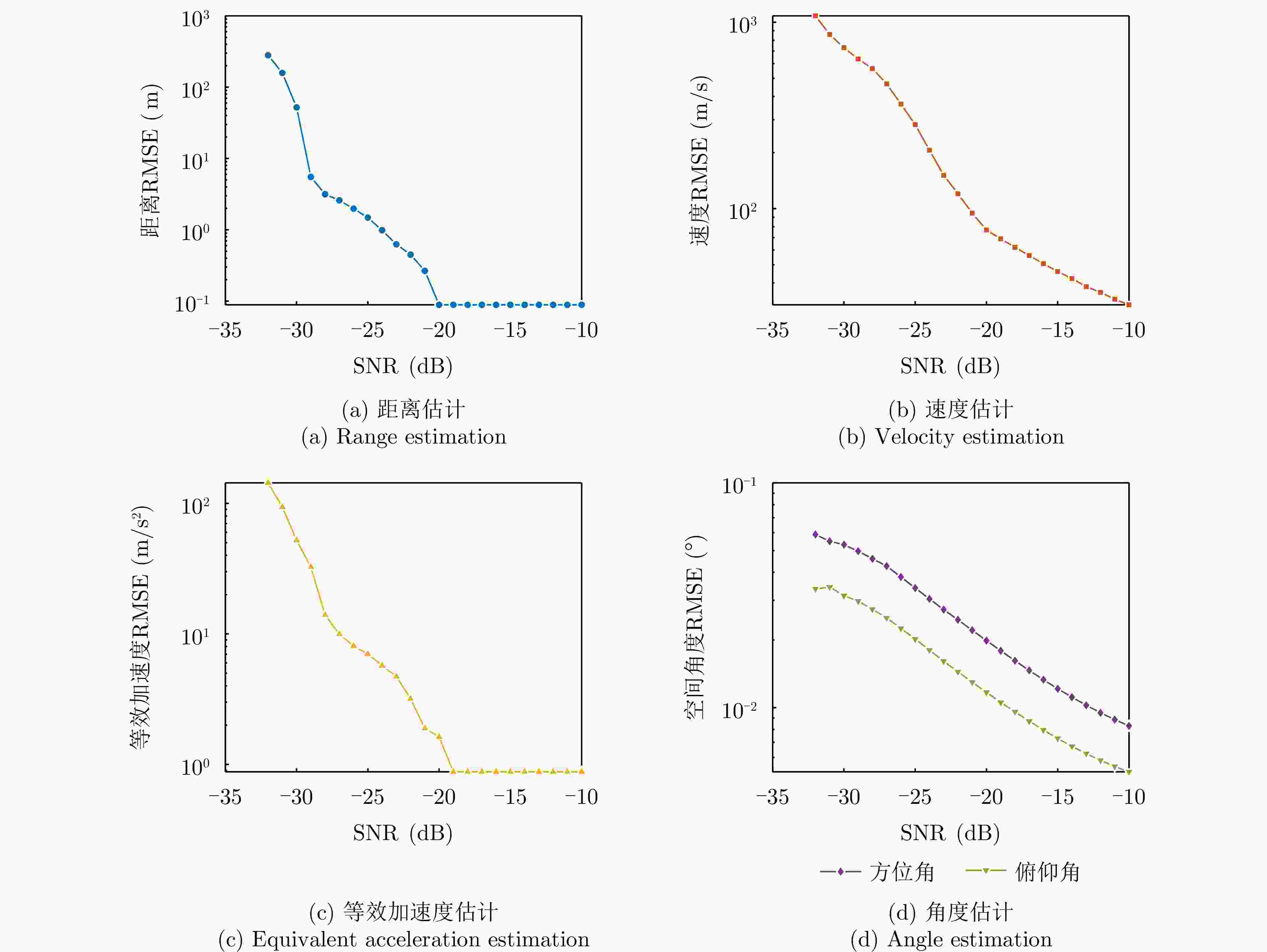
图 16 多维参数估计RMSE随SNR变化曲线
Figure 16. RMSE curves of multi-dimensional parameter estimation versus SNR
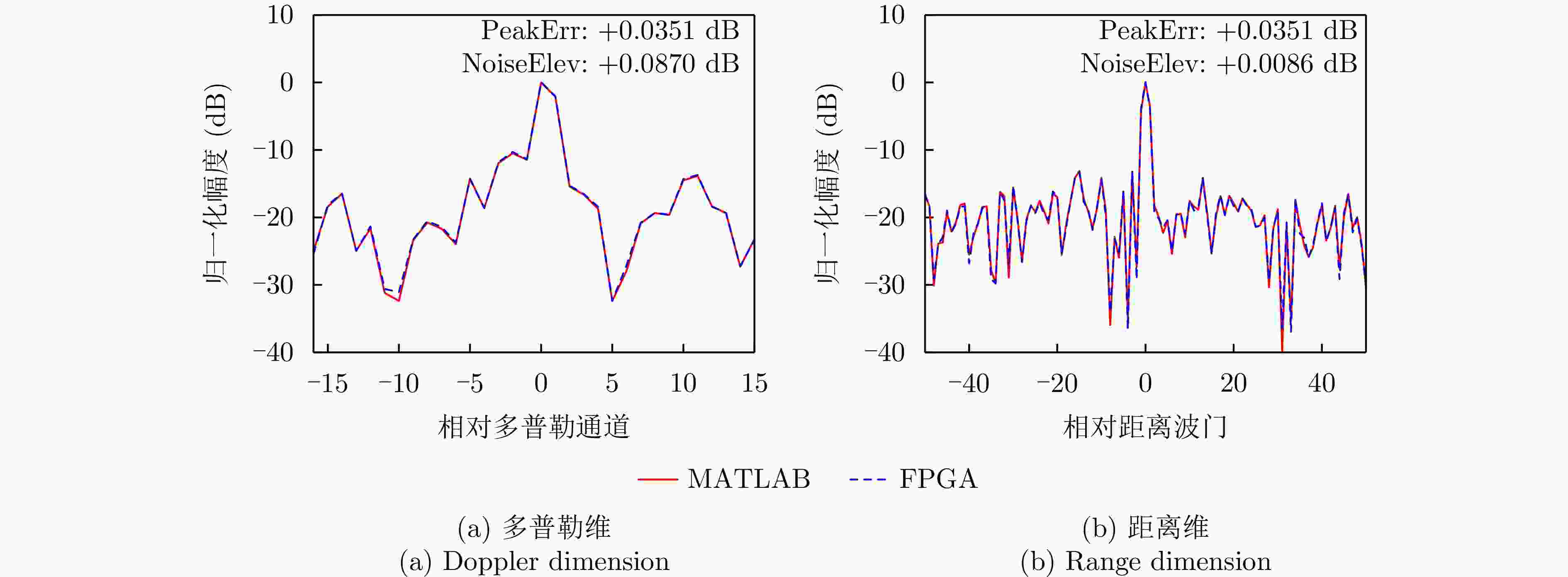
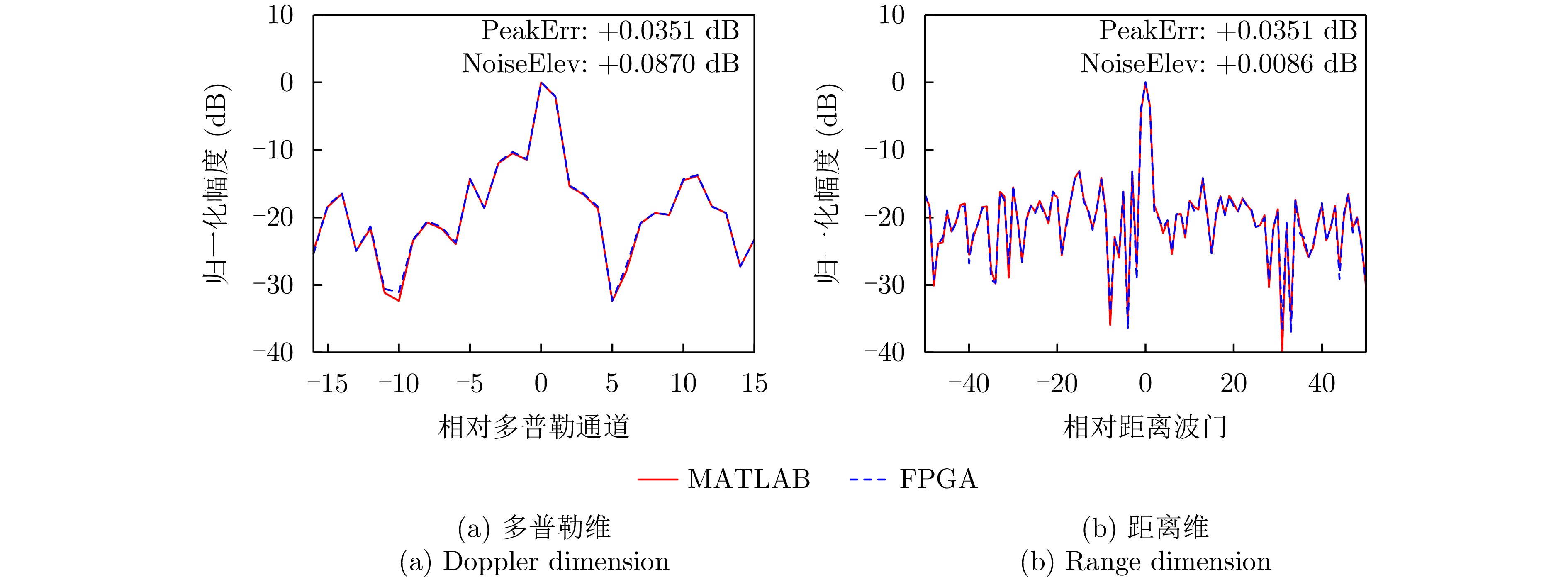
图 18 MATLAB与FPGA最终聚焦峰值切片对比
Figure 18. Comparison of the final focused peak slices between MATLAB and FPGA
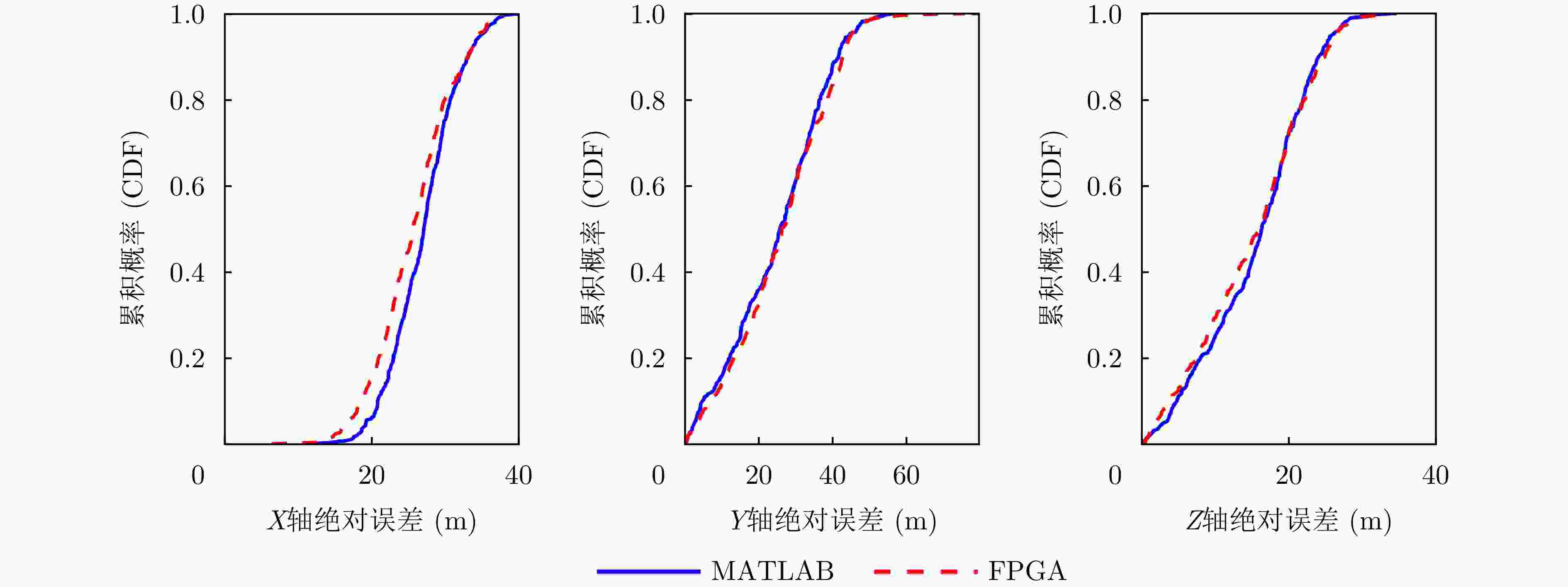
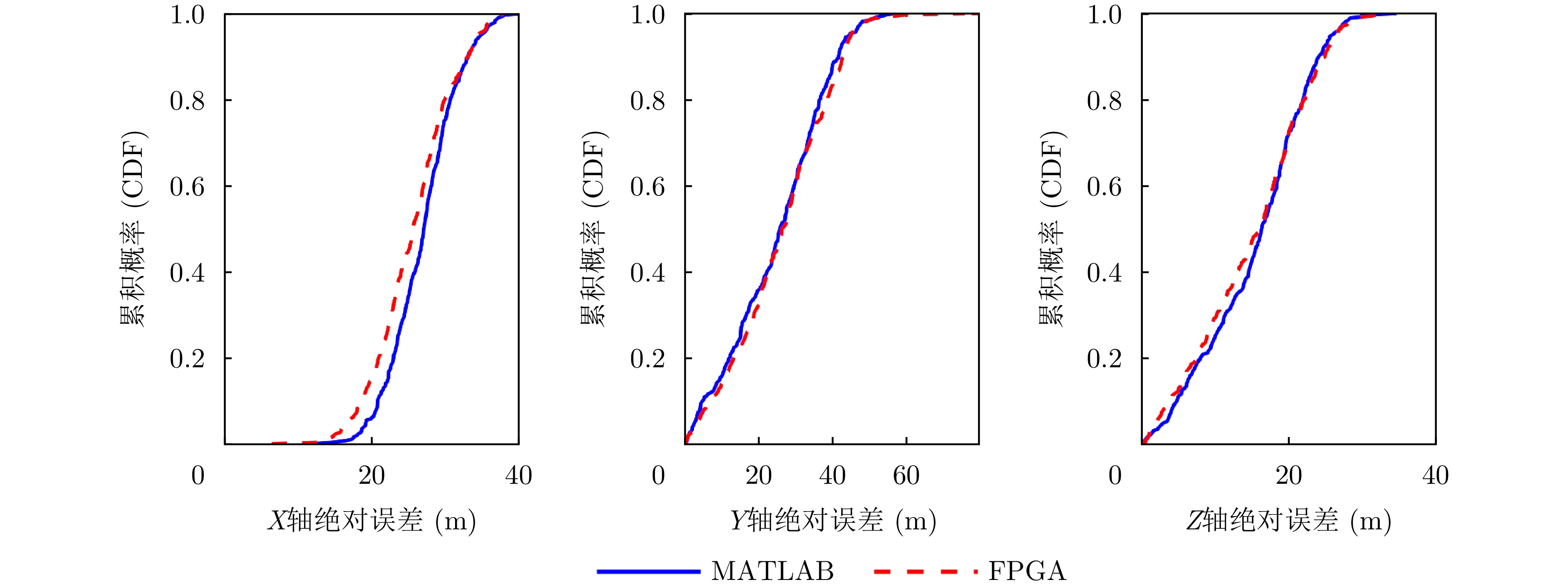
图 20 连续观测下三维空间定位误差的累积分布函数曲线
Figure 20. Cumulative Distribution Function (CDF) curves of 3D spatial positioning errors under continuous observation
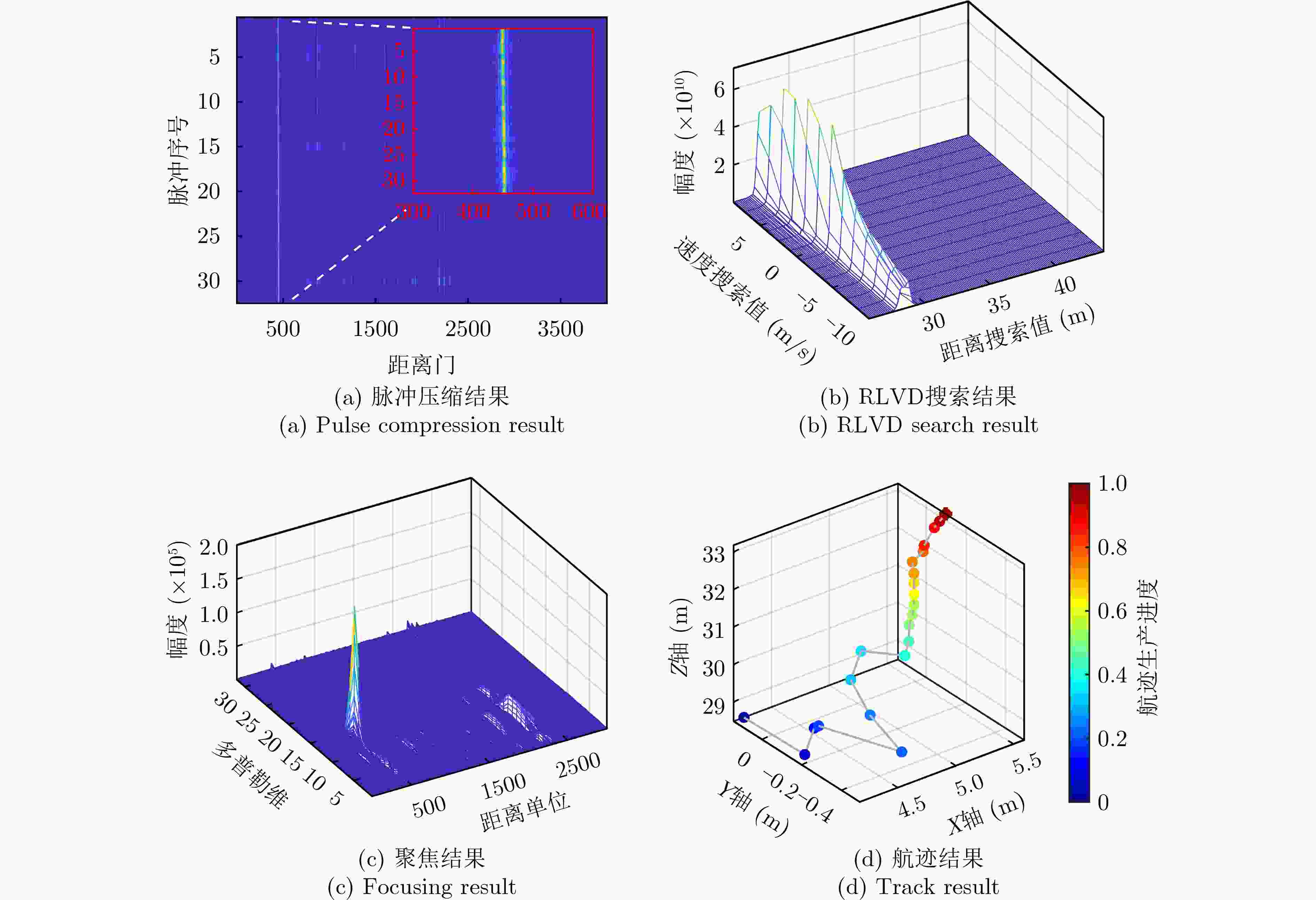
图 21 基于地基实测数据的系统全流程验证
Figure 21. End-to-end system validation based on ground-based measured data
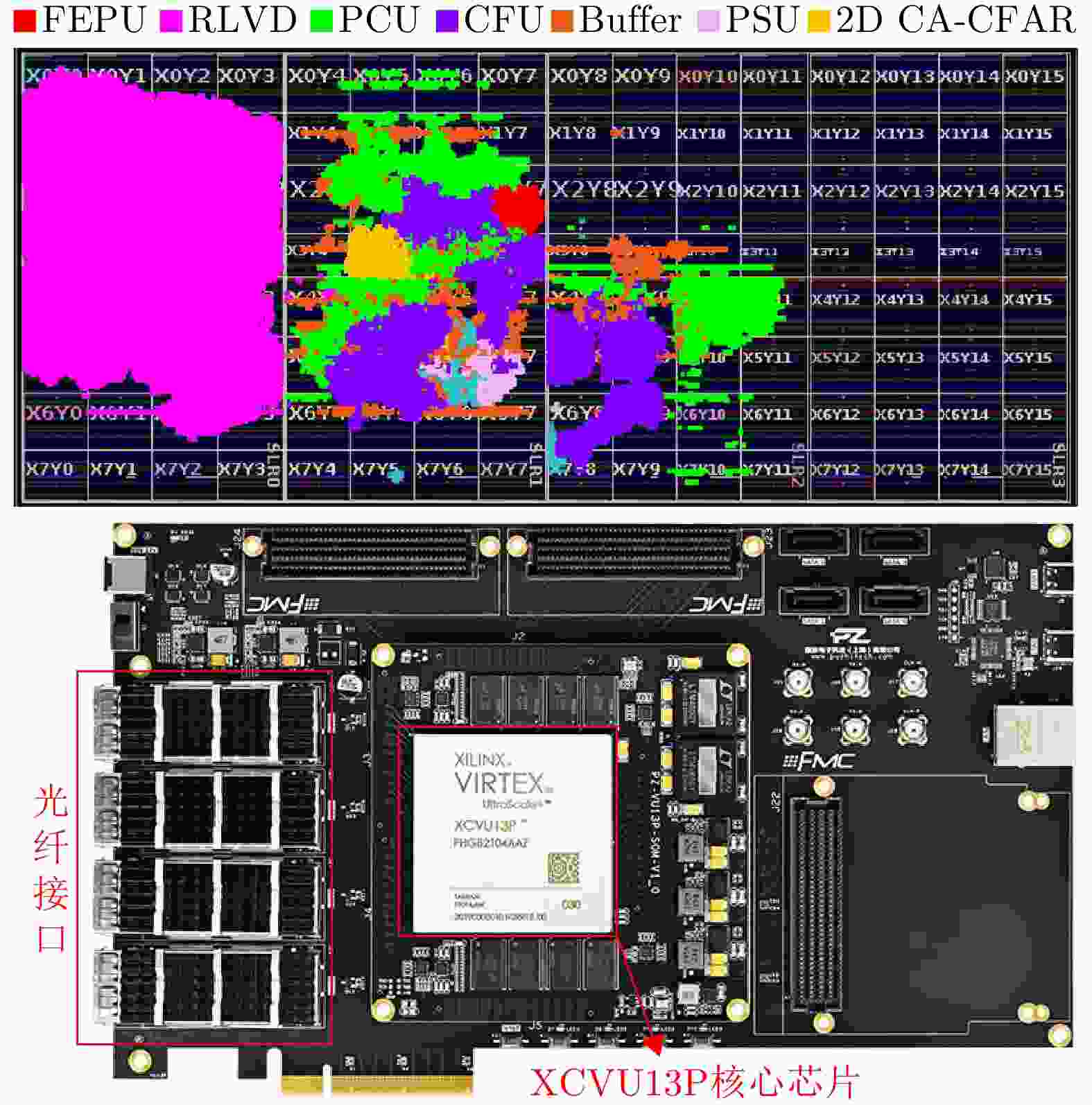
图 22 系统在VU13P FPGA上的布局布线以及板卡
Figure 22. Place and route result of the system on the VU13P FPGA and board card
表 1 典型相参积累算法计算复杂度与工程部署可行性分析
Table 1. Analysis of computational complexity and engineering deployment feasibility for typical coherent integration algorithms
算法名称 核心操作机制 搜索空间维度 计算复杂度 实时部署可行性 MTD 多普勒滤波(FFT) 0维 $ \mathcal{O}\left({N}_{\mathrm{sr}}M{\log }_{2} M\right) $ 极高 KT 慢时间重采样+FFT 1维 $ \mathcal{O}\left({N}_{\mathrm{sr}}{N}_{\mathrm{b}}M{\log }_{2} M\right) $ 较高 RFT 轨迹匹配+时域积分 2维 $ \mathcal{O}\left({N}_{\mathrm{r}}{N}_{\mathrm{v}}M\right) $ 中 RFRFT 轨迹匹配+FRFT 3维 $ \mathcal{O}\left({N}_{\mathrm{r}}{N}_{\mathrm{v}}{N}_{\alpha }M{\log }_{2} M\right) $ 较低 GRFT* 高阶轨迹匹配 + 时域积分 3维 $ \mathcal{O}\left({N}_{\mathrm{r}}{N}_{\mathrm{v}}{N}_{\mathrm{a}}M\right) $ 极低 标准RLVD 轨迹匹配+LVD 3维 $ \mathcal{O}\left({N}_{\mathrm{r}}{N}_{\mathrm{v}}{N}_{\mathrm{a}}{M}^{2}{\log }_{2} M\right) $ 极低 注:GRFT理论支持任意多阶维度的联合搜索,为便于同等应用场景对比,本表采用截断至加速度维的三阶运动模型参数进行复杂度评估。  下载: 导出CSV
下载: 导出CSV
表 2 仿真设定的雷达参数与目标运动特性
Table 2. Radar parameters and target motion characteristics for simulation
系统参数 数值 目标参数 数值 工作载频$ {f}_{{\mathrm{c}}} $ 35 GHz 初始斜距 90992.0888 m信号带宽B 10 MHz 径向速度 1642.2318 m/s脉冲重复频率PRF 3000 Hz等效加速度 – 476.5920 $ {\text{m/s}}^{2} $相干积累脉冲数N 32 初始方位角 $ {14.1087}^{\circ } $ 距离维采样点数 8192 初始俯仰角 $ -{0.2381}^{\circ } $
下载: 导出CSV
表 10 系统各模块及整体硬件资源消耗统计
Table 10. Hardware resource utilization statistics of individual modules and the overall system
模块名称 LUT FF BRAM URAM DSP FEPU 3835 7716 0 0 28 RLVD 171840 328186 56.5 0 707 PCU 49651 86691 352.5 0 306 CFU 66944 103290 45 0 274 Buffer 4915 15174 0 384 0 PSU 3123 5894 0 0 13 2D CA-CFAR 5119 12691 3 0 32 整体消耗 305427 559642 457 384 1360 总利用率 17.68% 16.19% 17.00% 30.00% 11.07%
下载: 导出CSV
表 3 不同信噪比下空间目标运动参数估计的RMSE统计(N=
1000 )Table 3. RMSE statistics of spatial target motion parameters estimation under different SNRs (N=
1000 )输入SNR (dB) 距离(m) 速度(m/s) 等效加速度(m/s2) 方位角(°) 俯仰角(°) –30 52.1273 730.3753 52.1483 0.0531 0.0315 –25 1.4807 282.4065 7.0248 0.0341 0.0202 –20 0.0888 76.8168 1.6257 0.0199 0.0117 –15 0.0888 46.0396 0.8777 0.0121 0.0073 –10 0.0888 30.5191 0.8777 0.0083 0.0052
下载: 导出CSV
表 4 核心计算模块数据位宽与混合精度截断策略
Table 4. Data bit width and mixed precision truncation strategy of core computing module
处理阶段 输入格式 输出格式 截断/量化策略 前端处理单元 int16 fp32 先整数加减合成,后转单精度浮点,兼顾底层资源与后级动态范围 脉冲压缩单元 fp32 fp32 规避定点FFT烦琐的手动缩放 Radon-Lv氏分布处理单元
(Radon变换)Q16.16 + Q1.31 13 bit整数索引 就近舍入取整,越界则饱和钳位至[0, 8191 ]Radon-Lv氏分布处理单元(LVD变换) fp32 fp32 主要规避定点FFT的手动缩放、h等参数敏感 精细补偿聚焦单元
(补偿相位)Q16.16 + 22 bit整数 fp32 高位宽定点CORDIC迭代,截断至30 bit小数后转回fp32 角度估计解算 fp32 fp32 提取和差复比值后,转入定点调用CORDIC求解,结果再转浮点
下载: 导出CSV
表 5 空间目标单帧参数估计性能对比
Table 5. Performance comparison of single-frame parameter estimation for space targets
参数类型 MATLAB浮点
模型FPGA混合
精度实现绝对量化误差 距离(m) 90992 91000 8 速度(m/s) 1552.1871 1565.0443 12.8572 等效加速度(m/s2) – 475.7143 – 475.7144 0.0001 方位角(°) 14.0908 14.1572 0.0664 俯仰角(°) – 0.2899 – 0.2753 0.0146
下载: 导出CSV
表 6 连续观测下目标运动参数估计的量化误差统计(FPGA vs MATLAB)
Table 6. Statistical analysis of quantization errors in target motion parameter estimation (FPGA vs MATLAB)
参数类型 RMSE 均值 ± 标准差 95%误差限 距离(m) 3.124 1.100 ± 2.928 $ \leq $ 8.000 速度(m/s) 14.521 6.699 ± 12.904 $ \leq $ 25.700 等效加速度(m/s2) 8.277 0.223 ± 8.284 $ \leq $ 29.732 方位角(°) 0.021 –0.001 ± 0.021 $ \leq $ 0.046 俯仰角(°) 0.012 0.001 ± 0.012 $ \leq $ 0.028
下载: 导出CSV
表 7 连续观测下X-Y-Z轴空间定位均方根误差统计(m)
Table 7. RMSE statistics of spatial positioning along the X-Y-Z axes under continuous observation (m)
处理平台 X轴RMSE Y轴RMSE Z轴RMSE MATLAB浮点模型 27.312 28.070 16.979 FPGA混合精度系统 26.092 29.138 16.791 绝对量化误差差异 1.220 1.068 0.188
下载: 导出CSV
表 8 外场测试雷达核心工作参数
Table 8. Core operating parameters of the radar in field test
雷达系统参数 数值 载波频率$ {f}_{{\mathrm{c}}} $ 15.2 GHz 信号带宽B 1200 MHz采样率$ {f}_{{\mathrm{s}}} $ 2400 MHz脉冲重复频率PRF 400 Hz 相干积累脉冲数N 32 方位向波束宽度$ {\theta }_{\mathrm{{a}}} $ $ {4}^{\circ } $ 俯仰向波束宽度$ {\theta }_{{\mathrm{e}}} $ $ {20}^{\circ } $
下载: 导出CSV
表 9 外场实测数据解算结果与长时误差统计
Table 9. Estimation results and long-term error statistics of field measurement data
参数 首帧解算对比 连续观测统计 MATLAB实现 FPGA实现 量化RMSE 距离(m) 27.9182 27.8750 0.4615 速度(m/s) 6.2305 6.1523 0.1183 等效加速度(m/s2) 1.2336 1.2336 0.0854 方位角(°) – 12.3246 – 12.2851 0.1427 俯仰角(°) 81.7254 81.7512 0.1156
下载: 导出CSV
表 11 典型雷达信号处理 FPGA 加速架构综合性能对比
Table 11. Comprehensive performance comparison of typical FPGA acceleration architectures for radar signal processing
对比维度 核心算法与体制 硬件平台 徙动校正能力 数据规模与单帧处理延迟 资源消耗情况 架构核心特征 文献[25] FMCW雷达:2D FFT、加窗、幅相
计算、CFARZynq
UltraScale+常规2D FFT处理,
无针对性校正耗时较纯FFT缩短7.32倍,最大支持 4096 点LUT 10.89k, DSP 20, FF 6.37k 采用半精度浮点运算消除量化噪声,内存基FFT 文献[26] PD雷达:频域脉压、MTD与CA-CFAR 3 × Kintex-7 无专用高动态校正,仅
支持常规慢速目标MTD依赖多芯片流水线,未提供绝对时延 主控芯片 LUT 154.6k, DSP 1.29k, BRAM 600 多FPGA分布式流水线,13波束大吞吐
并行处理文献[27] 基于阈值激活的
简化Lv氏分布Kintex
UltraScale无,仅具备一维频率
调制信号参数分析能力N=256规模瞬态数据:0.61 ms LUT 10.10k, DSP 98, BRAM 468.5, FF 15.15k 阈值激活自适应采样;CZT替代传统DFT
消除冗余计算文献[28] 可调多脉冲相参积累 Kintex
UltraScale较弱,仅通过动态调整脉冲数缓解多普勒展宽 33 μs,仅支持最大40脉冲相参积累 LUT 24.6k, DSP 8, BRAM 293, FF 27.23k 基于DDR4时分复用,
软硬件协同动态
控制积分时间本文 降维RLVD粗估计级联局部精细搜索补偿、2D CA-CFAR、测角 Virtex
UltraScale+有效克服星对星等场景
下的跨距离与跨多普
勒双重徙动效应全流程解算4 × 32
×8192 规模数据:
8.41 msLUT 305.43k, DSP 1.36k, BRAM 457, FF 559.64k 非对称通道处理机制、计算与存储解耦、8通道细粒度并行
下载: 导出CSV
-
[1] ESA. ESA space environment report 2025[R/OL]. European Space Agency. https://www.esa.int/Space_Safety/Space_Debris/ESA_Space_Environment_Report_2025, 2025. [2] 马宝林, 朱旭宇. 国外太空态势感知系统发展综述[J]. 战术导弹技术, 2025(1): 60–66, 74. doi: 10.16358/j.issn.1009-1300.20240030.MA Baolin and ZHU Xuyu. Development overview of foreign space situation awareness system[J]. Tactical Missile Technology, 2025(1): 60–66, 74. doi: 10.16358/j.issn.1009-1300.20240030. [3] 王锋, 张哲, 叶昊, 等. 国外空间态势感知能力分析与发展趋势(特邀)[J]. 激光与光电子学进展, 2024, 61(20): 2011006. doi: 10.3788/LOP240882.WANG Feng, ZHANG Zhe, YE Hao, et al. Development status and trends of foreign space situation awareness ability (Invited)[J]. Laser & Optoelectronics Progress, 2024, 61(20): 2011006. doi: 10.3788/LOP240882. [4] ANGER S, JIROUSEK M, DILL S, et al. High-resolution inverse synthetic aperture radar imaging of satellites in space[J]. IET Radar, Sonar & Navigation, 2024, 18(4): 544–563. doi: 10.1049/rsn2.12505. [5] 郑珍珍, 朱振才, 康一舟. 天基空间碎片可见光观测系统与关键技术发展概述[J]. 光学学报, 2022, 42(17): 1712002. doi: 10.3788/AOS202242.1712002.ZHENG Zhenzhen, ZHU Zhencai, and KANG Yizhou. Overview of space-based optical observation systems for space debris and development of key technologies[J]. Acta Optica Sinica, 2022, 42(17): 1712002. doi: 10.3788/AOS202242.1712002. [6] GRASSI M, CETIN E, and DEMPSTER A G. Enabling orbit determination of space debris using narrowband radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 1231–1240. doi: 10.1109/TAES.2015.140129. [7] 江林海, 龚柏春, 刘传凯, 等. 天基分布式无源探测的空间多目标跟踪方法[J]. 系统工程与电子技术, 2024, 46(8): 2789–2797. doi: 10.12305/j.issn.1001-506X.2024.08.26.JIANG Linhai, GONG Baichun, LIU Chuankai, et al. Space multi-target tracking method for space-based distributed passive detection[J]. Systems Engineering and Electronics, 2024, 46(8): 2789–2797. doi: 10.12305/j.issn.1001-506X.2024.08.26. [8] 王睿铮. 天基空间目标探测雷达信号处理方法研究[D]. 中国科学院空天信息创新研究院, 2024.WANG Ruizheng. Research on signal processing method of space-based space target detection radar[D]. [Master’s thesis], Beijing, Aerospace Information Research Institute, Chinese Academy of Sciences, 2024. [9] CHEN Xiaolong, DING Hao, SUN Yanli, et al. Long-time coherent integration-based detection method for high-speed and highly maneuvering radar target[C]. CIE International Conference on Radar, Guangzhou, China, 2016: 1–5. doi: 10.1109/RADAR.2016.8059274. [10] TAO Ran, ZHANG Ning, and WANG Yunchu. Analysing and compensating the effects of range and Doppler frequency migrations in linear frequency modulation pulse compression radar[J]. IET Radar, Sonar & Navigation, 2011, 5(1): 12–22. doi: 10.1049/iet-rsn.2009.0265. [11] PERRY R P, DIPIETRO R C, and FANTE R L. SAR imaging of moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 188–200. doi: 10.1109/7.745691. [12] 张顺生, 曾涛. 基于keystone变换的微弱目标检测[J]. 电子学报, 2005, 33(9): 1675–1678. doi: 10.3321/j.issn:0372-2112.2005.09.033.ZHANG Shunsheng and ZENG Tao. Weak target detection based on keystone transform[J]. Acta Electronica Sinica, 2005, 33(9): 1675–1678. doi: 10.3321/j.issn:0372-2112.2005.09.033. [13] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection, I: Generalized Doppler filter bank[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1186–1202. doi: 10.1109/TAES.2011.5751251. [14] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection (II): Blind speed sidelobe suppression[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2473–2489. doi: 10.1109/TAES.2011.6034645. [15] YU Ji, XU Jia, PENG Yingning, et al. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 991–1004. doi: 10.1109/TAES.2012.6178044. [16] CHEN Xiaolong, GUAN Jian, LIU Ningbo, et al. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration[J]. IEEE Transactions on Signal Processing, 2014, 62(4): 939–953. doi: 10.1109/TSP.2013.2297682. [17] LV Xiaolei, BI Guoan, WAN Chunru, et al. Lv’s distribution: Principle, implementation, properties, and performance[J]. IEEE Transactions on Signal Processing, 2011, 59(8): 3576–3591. doi: 10.1109/TSP.2011.2155651. [18] LUO Shan, LV Xiaolei, and BI Guoan. Lv’s distribution for time-frequency analysis[C]. The 2nd International Conference on Circuits, Systems, Control, Signals, Prague, Czech Republic Prague, Czech Republic, 2011: 110–115. doi: 10.1109/CompComm.2017.8323055. [19] LUO Shan, BI Guoan, LV Xiaolei, et al. Performance analysis on Lv distribution and its applications[J]. Digital Signal Processing, 2013, 23(3): 797–807. doi: 10.1016/j.dsp.2012.11.011. [20] LI Xiaolong, CUI Guolong, YI Wei, et al. Coherent integration for maneuvering target detection based on Radon-Lv’s distribution[J]. IEEE Signal Processing Letters, 2015, 22(9): 1467–1471. doi: 10.1109/LSP.2015.2390777. [21] ZHENG Jibin, SU Tao, LIU Hongwei, et al. Radar high-speed target detection based on the frequency-domain deramp-keystone transform[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(1): 285–294. doi: 10.1109/JSTARS.2015.2453996. [22] JIN Ke, LAI Tao, WANG Yubing, et al. Coherent integration for radar high-speed maneuvering target based on frequency-domain second-order phase difference[J]. Electronics, 2019, 8(3): 287. doi: 10.3390/electronics8030287. [23] MI Yunpeng, ZHANG Yunhua, and YANG Jiefang. Long-time coherent integration algorithm for high-speed maneuvering target detection[J]. Journal of Applied Remote Sensing, 2023, 17(2): 026515. doi: 10.1117/1.JRS.17.026515. [24] HUSSAIN M, AHMED R, and CHEEMA H M. Segmented radon Fourier transform for long-time coherent radars[J]. IEEE Sensors Journal, 2023, 23(9): 9582–9594. doi: 10.1109/JSEN.2023.3260024. [25] HEO J, JUNG Y, LEE S, et al. FPGA implementation of an efficient FFT processor for FMCW radar signal processing[J]. Sensors, 2021, 21(19): 6443. doi: 10.3390/s21196443. [26] YANG Ming, YANG Jing, HOU Yanan, et al. Implementation architecture of signal processing in pulse Doppler radar system based on FPGA[J]. The Journal of Engineering, 2019, 2019(21): 7335–7338. doi: 10.1049/joe.2019.0644. [27] LEI Maolin, YE Peng, LI Chengyang, et al. A threshold activation-based simplified Lv’s transform algorithm for transient multi-component linear frequency modulation signals analysis[J]. Review of Scientific Instruments, 2024, 95(10): 104711. doi: 10.1063/5.0215885. [28] BI Jinrui, ZHANG Hongyu, SUN Lihua, et al. Design and realization of dynamically adjustable multi-pulse real-time coherent integration system[J]. Electronics, 2026, 15(2): 397. doi: 10.3390/electronics15020397. [29] ZHANG Haifeng, LONG Mingliang, DENG Huarong, et al. Developments of space debris laser ranging technology including the applications of picosecond lasers[J]. Applied Sciences, 2021, 11(21): 10080. doi: 10.3390/app112110080. [30] FAMILI A, SUN Shihua, ATALAY T, et al. STARMAP: Spaceborne target acquisition radar with meta-RL assisted placement[J]. IEEE Open Journal of the Communications Society, 2025, 6: 6218–6241. doi: 10.1109/OJCOMS.2025.3593088. -









计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

