
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Adaptive Multifocus Correlation Filter with Bayesian Fusion for Maritime Radar Target Tracking
-
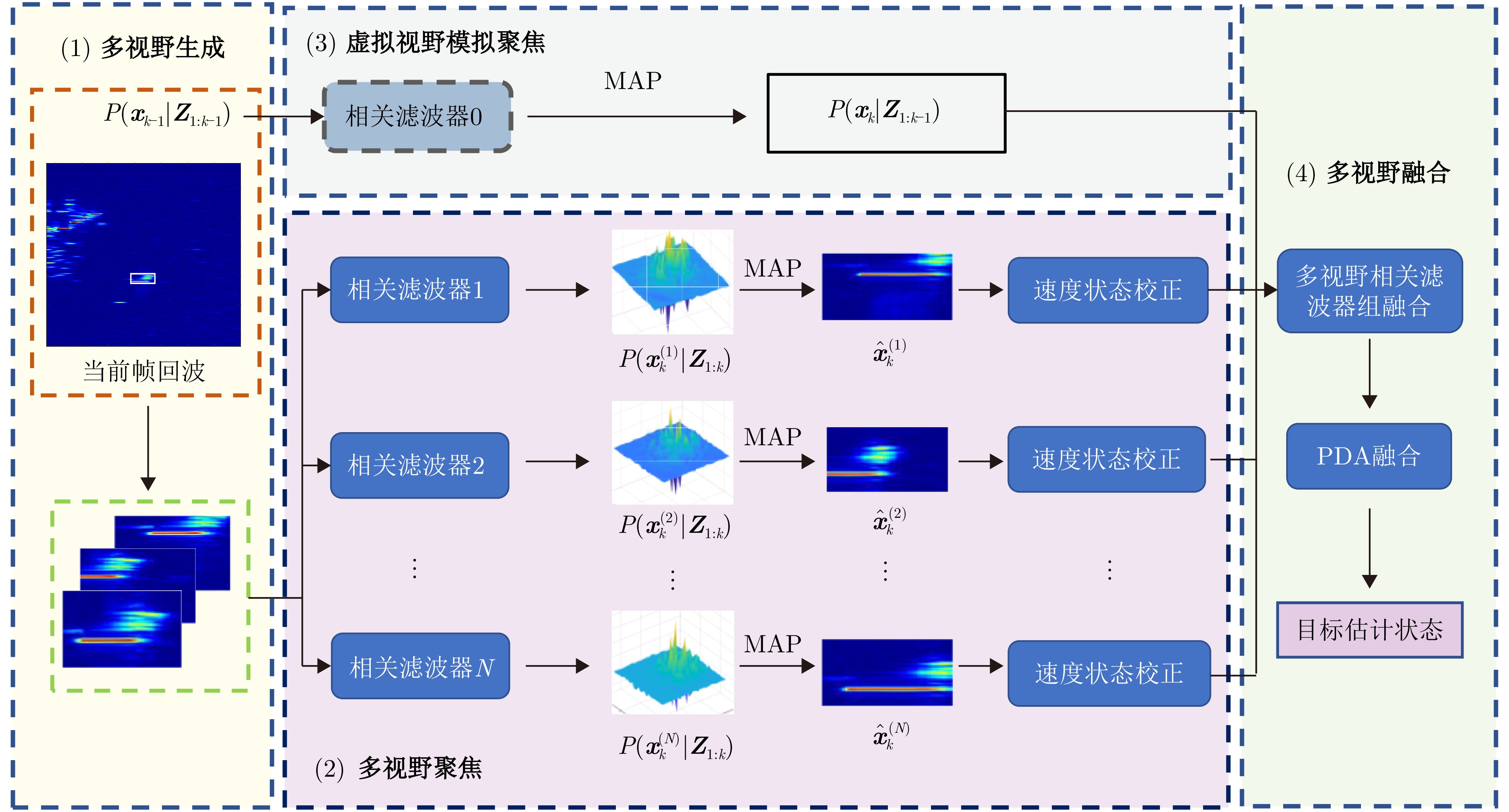
摘要: 该文针对复杂海面背景下雷达目标跟踪的关键技术展开研究。基于特征辅助的经典贝叶斯跟踪方法在海面雷达目标跟踪问题中已取得一定进展,但在强杂波淹没与目标相互作用的复杂场景中,其鲁棒性显著降低。为解决这些问题,该文提出了一种自适应多视野聚焦贝叶斯融合相关滤波器。该方法在目标状态概率分布区域内生成多个子视野,并在每个视野中部署独立的相关滤波器构建局部响应图,实现多假设状态建模。在跟踪器的迭代过程中,各滤波器生成的响应图不仅用于状态估计,还引导子视野分布在时序中动态聚焦于目标存在的高置信区域,从而增强跟踪器对复杂运动的适应能力。此外,针对复杂海面背景下跟踪器容易出现虚警和漏警的问题,算法引入了虚拟视野模拟聚焦模型,有效抑制了复杂环境因素导致的滤波器漂移现象。最终,该文在贝叶斯多量测跟踪框架下融合多视野量测,构建全局状态估计,获得了更精确的目标状态融合估计。基于仿真与实测雷达数据的实验结果表明,所提算法在中心定位误差指标上平均误差为3.47像素,较典型特征辅助相关滤波方法平均降低约70%,在定位精度指标上整体提升了约21%,显著提升了目标跟踪精度与抗干扰能力,验证了多视野聚焦相关滤波机制和贝叶斯融合策略的有效性。Abstract: This study addresses the critical challenge of radar target tracking in complex maritime environments. Although conventional feature-aided Bayesian tracking methods have advanced in maritime radar applications, their robustness considerably deteriorates in scenarios with severe sea clutter and interacting targets. To overcome these limitations, an Adaptive Multifocus Correlation Filter with Bayesian Fusion (AMFCF-BF) is proposed herein. The method constructs multiple subviews within the probabilistic distribution of the target state, with each subview assigned an independent correlation filter to generate a local response map, enabling multihypothesis state modeling. During iterative tracking, these response maps are used to estimate states and dynamically guide the focusing of subviews toward high-confidence regions, enhancing adaptability to complex target maneuvers. To further mitigate false alarms and missed detections caused by strong sea clutter, a virtual-view simulation based focusing model is developed, which effectively suppresses filter drift under adverse conditions. Finally, all subview responses are fused within a Bayesian multimeasurement framework to produce a globally consistent target-state estimate. Experimental results using simulated and real maritime radar data demonstrate that the proposed AMFCF-BF achieves an average center location error of 3.47 pixels, reducing tracking error by ~70% compared with typical feature-assisted correlation filtering methods. In terms of location precision, the proposed filter achieves an overall improvement of ~21%, showing significantly enhanced tracking accuracy and anti-interference performance, validating the effectiveness of the multifocus correlation filtering mechanism and Bayesian fusion strategy.
-
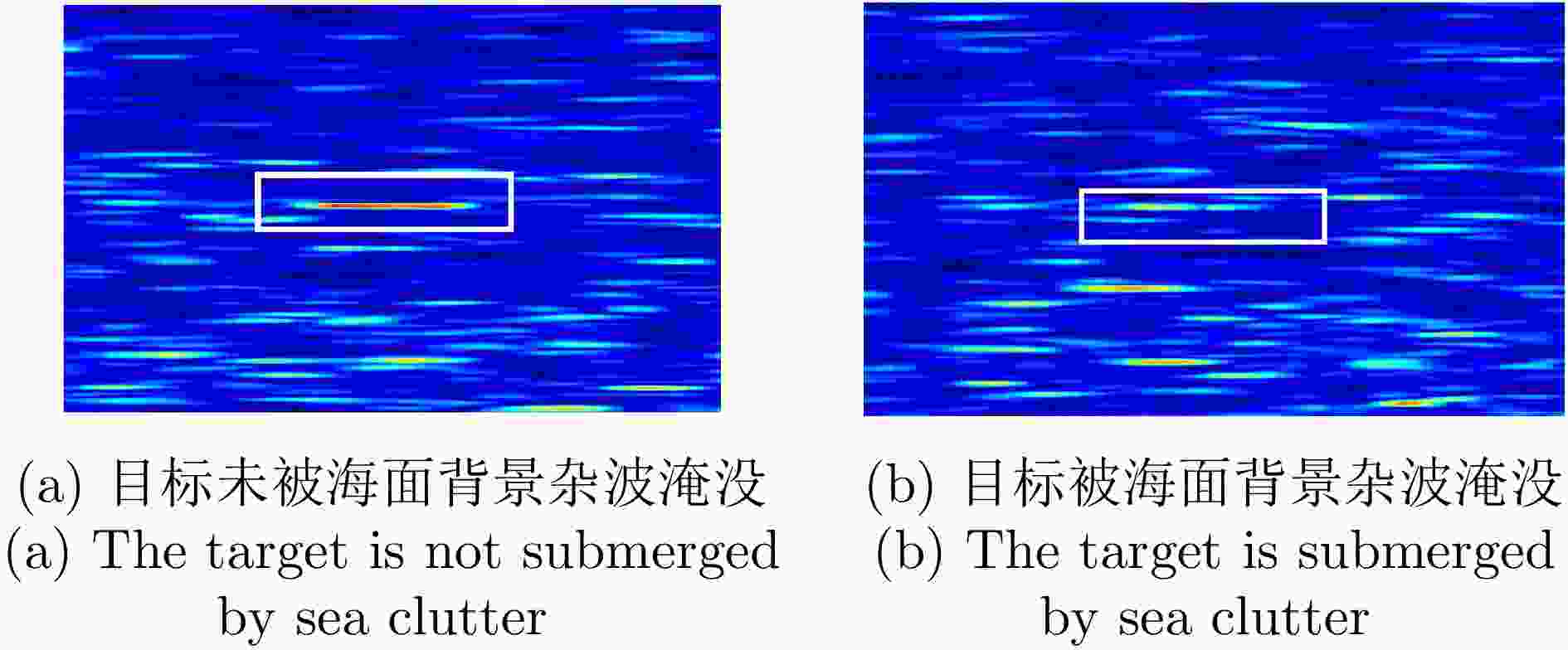
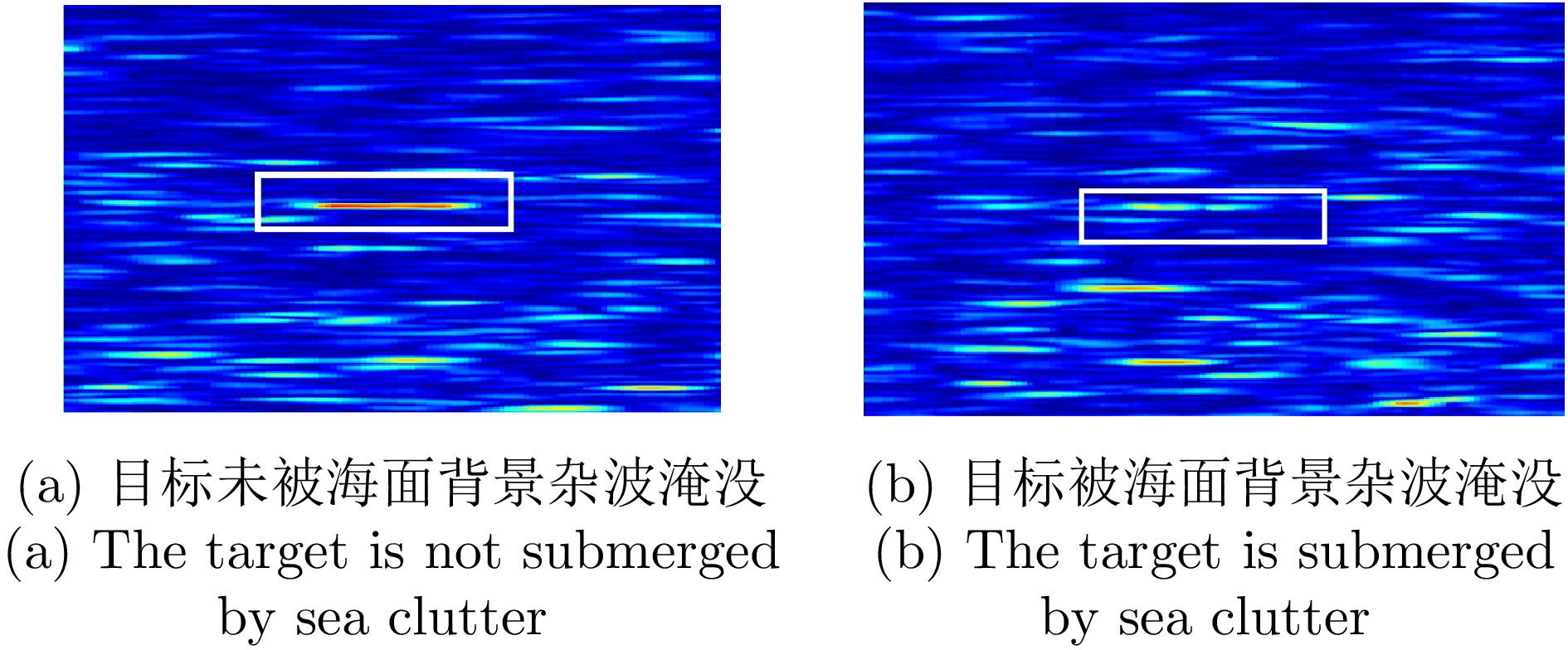
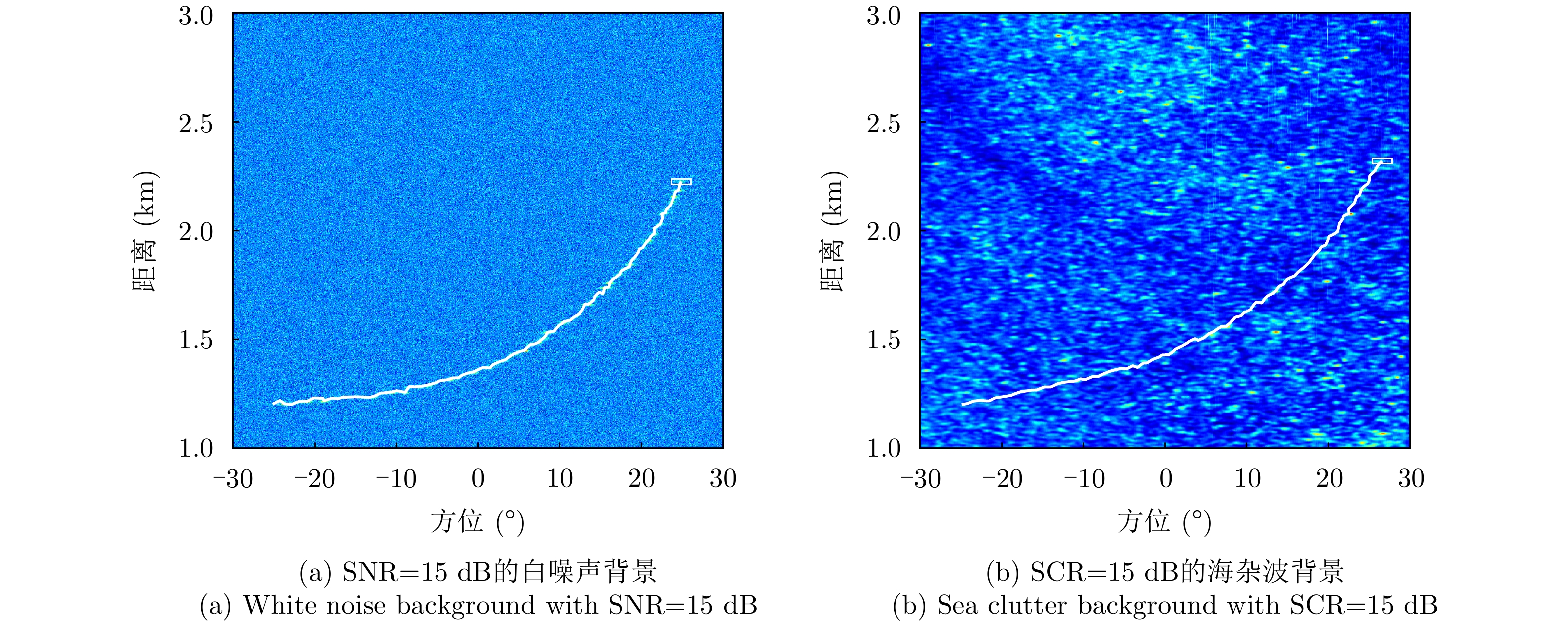
图 3 海面背景杂波淹没目标示意图
Figure 3. Illustration of the target submerged by background clutter on the sea surface
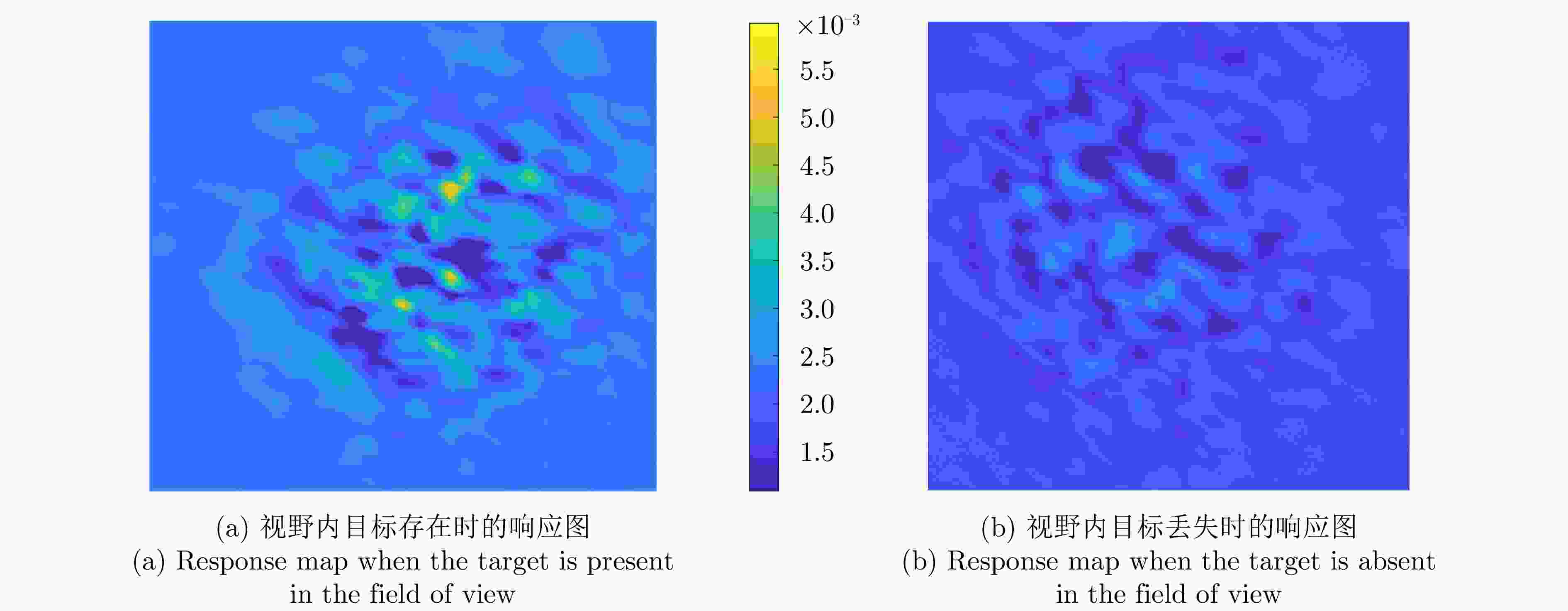
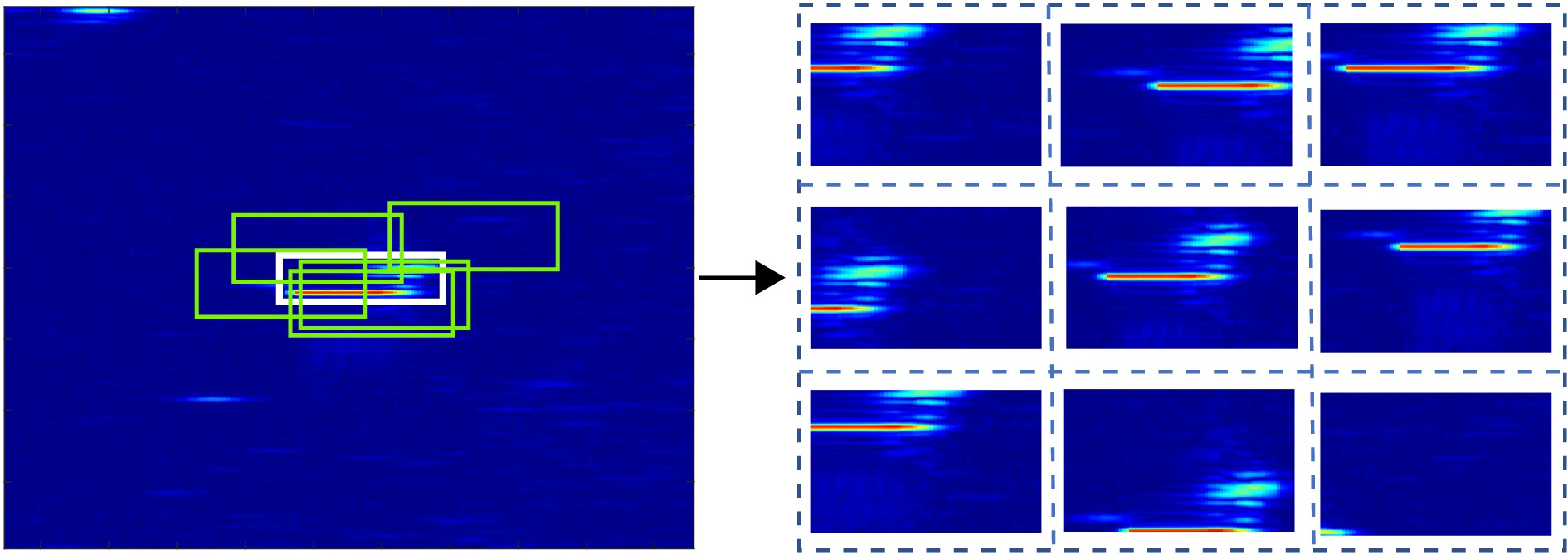
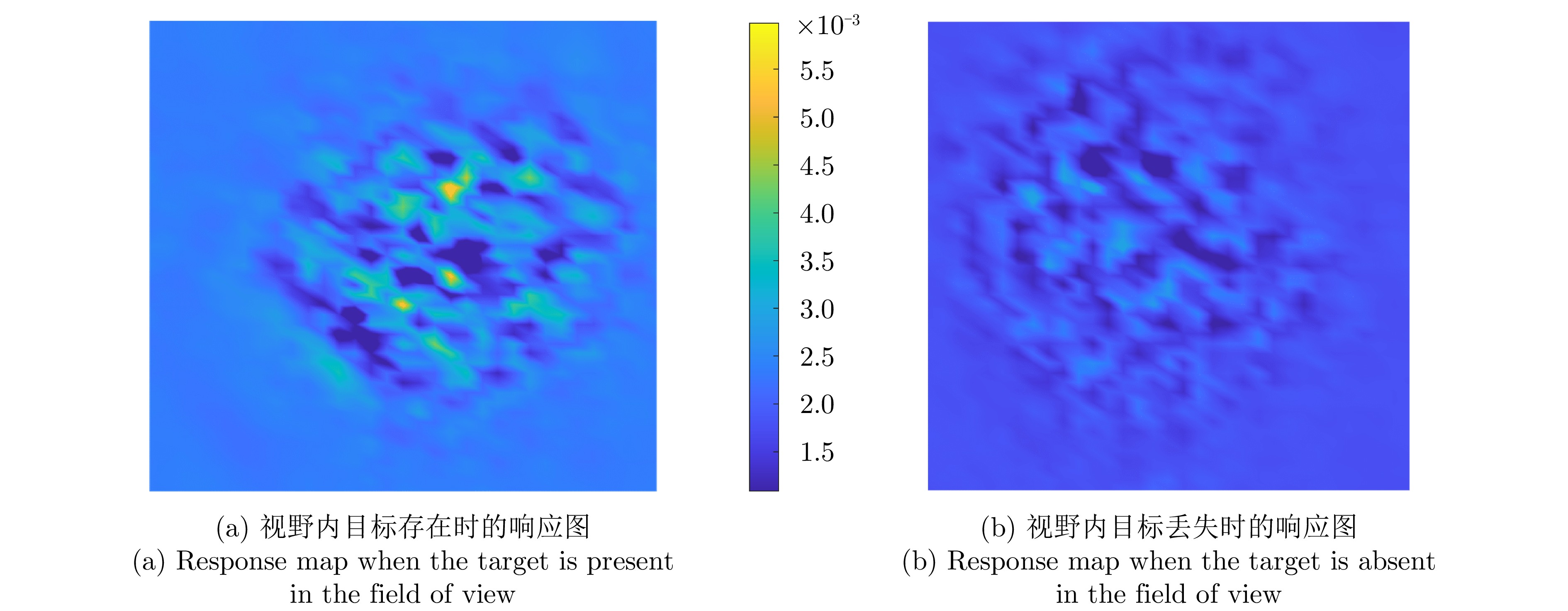
图 4 视野目标存在或丢失的响应图
Figure 4. Response map for target presence or absence in the field of view
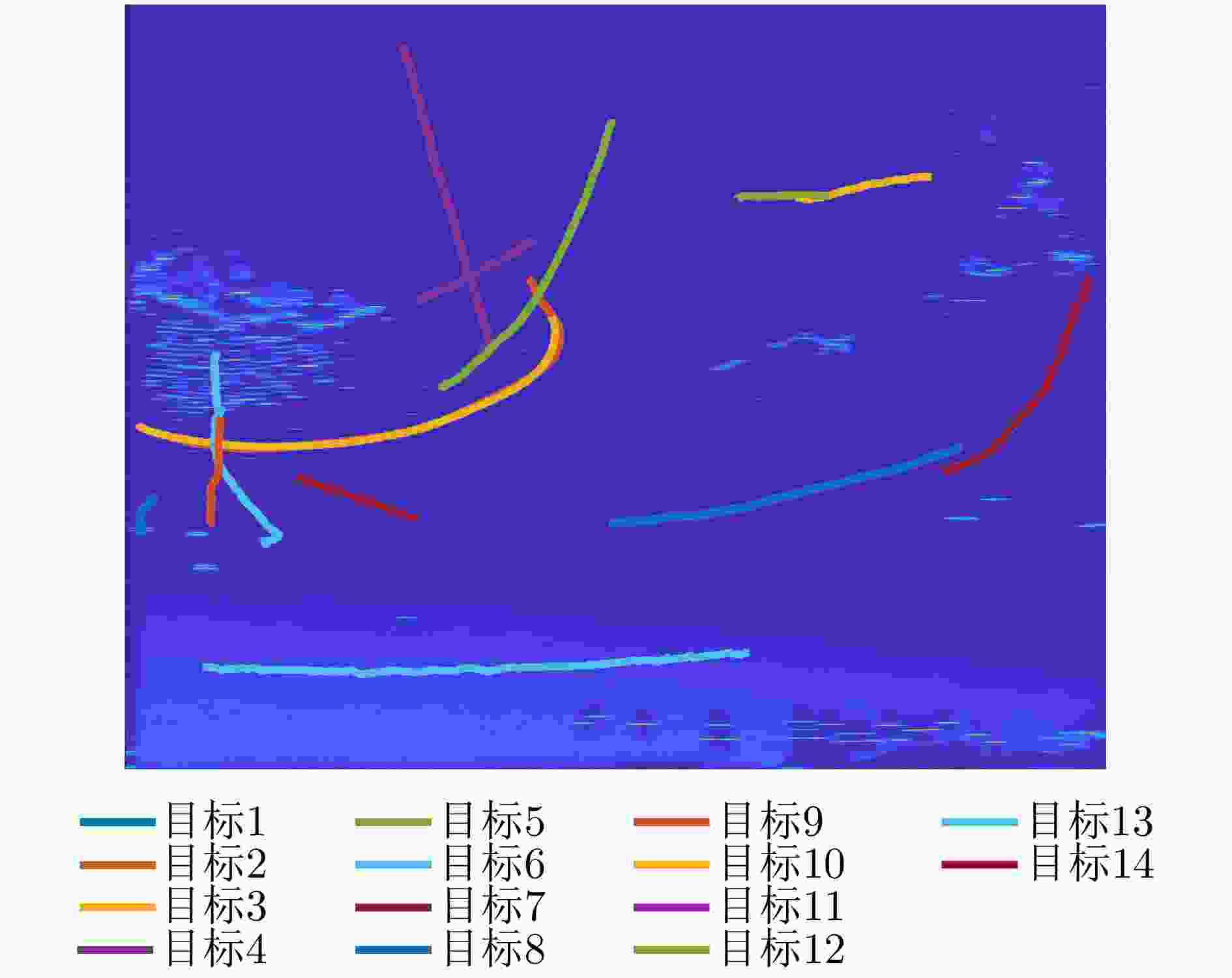
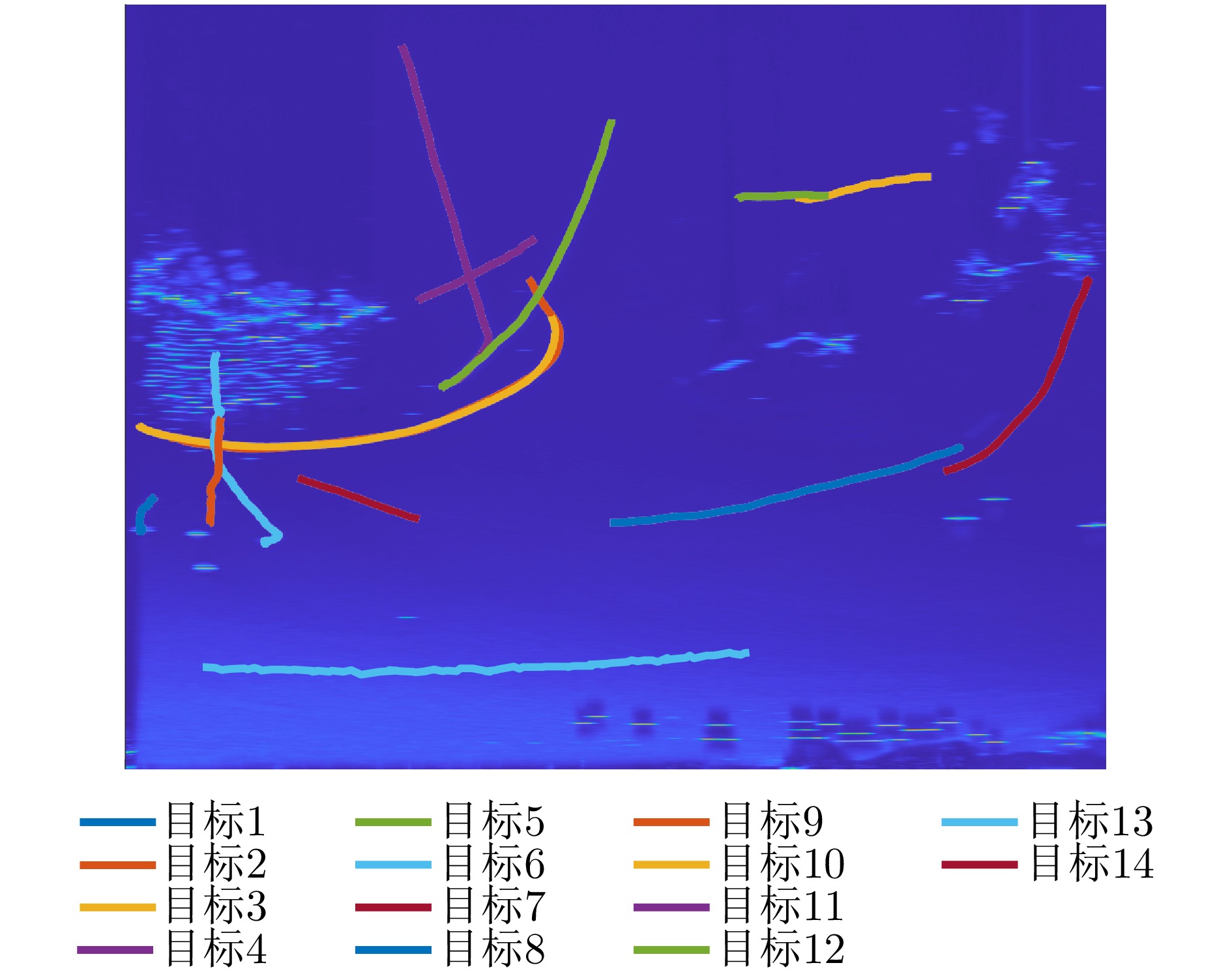
图 5 数据集包含的14个目标的航迹
Figure 5. The processed trajectories of the 14 targets in the dataset
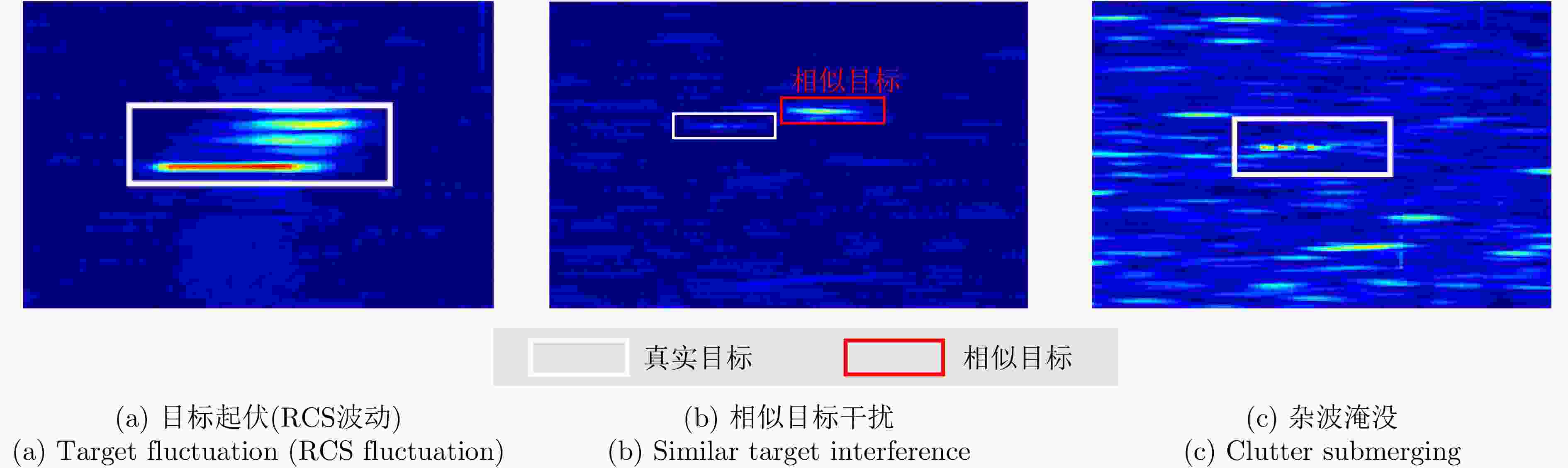
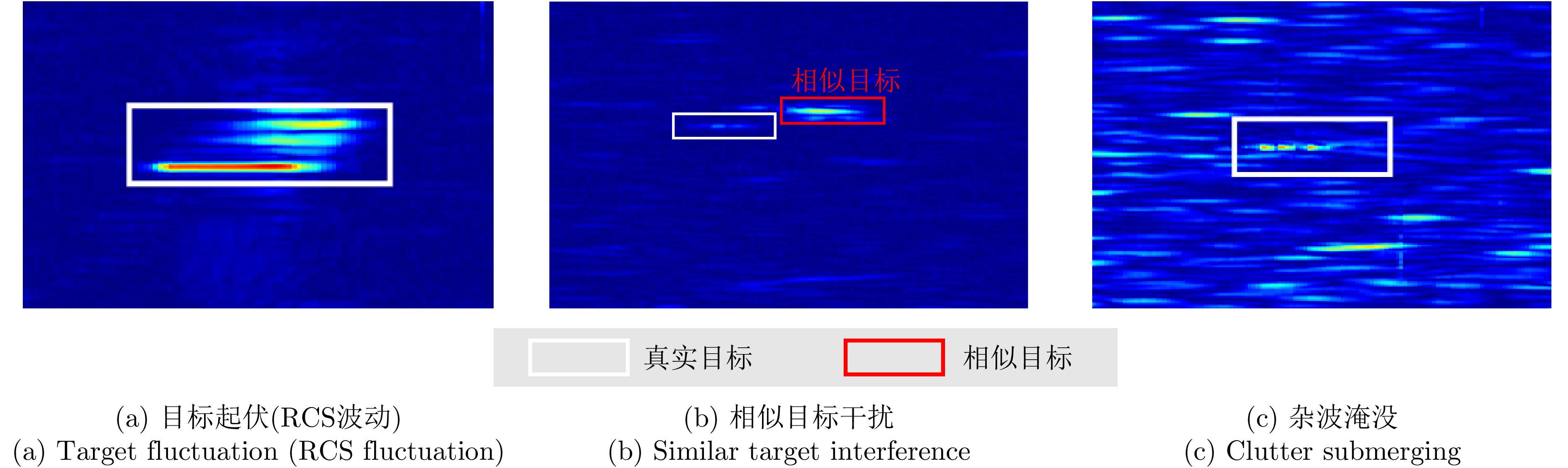
图 6 本数据集中的目标跟踪器主要面对的3种典型的挑战性场景
Figure 6. The target trackers in this dataset primarily confront three typical challenging scenarios
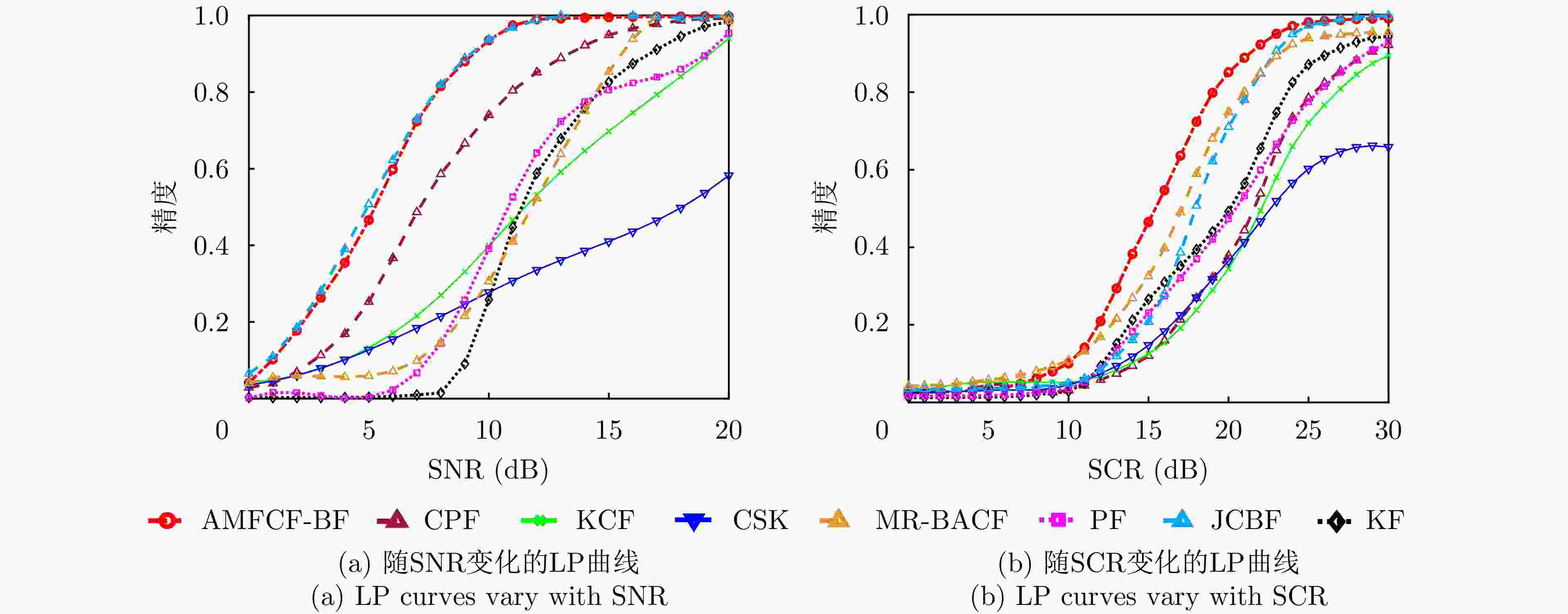
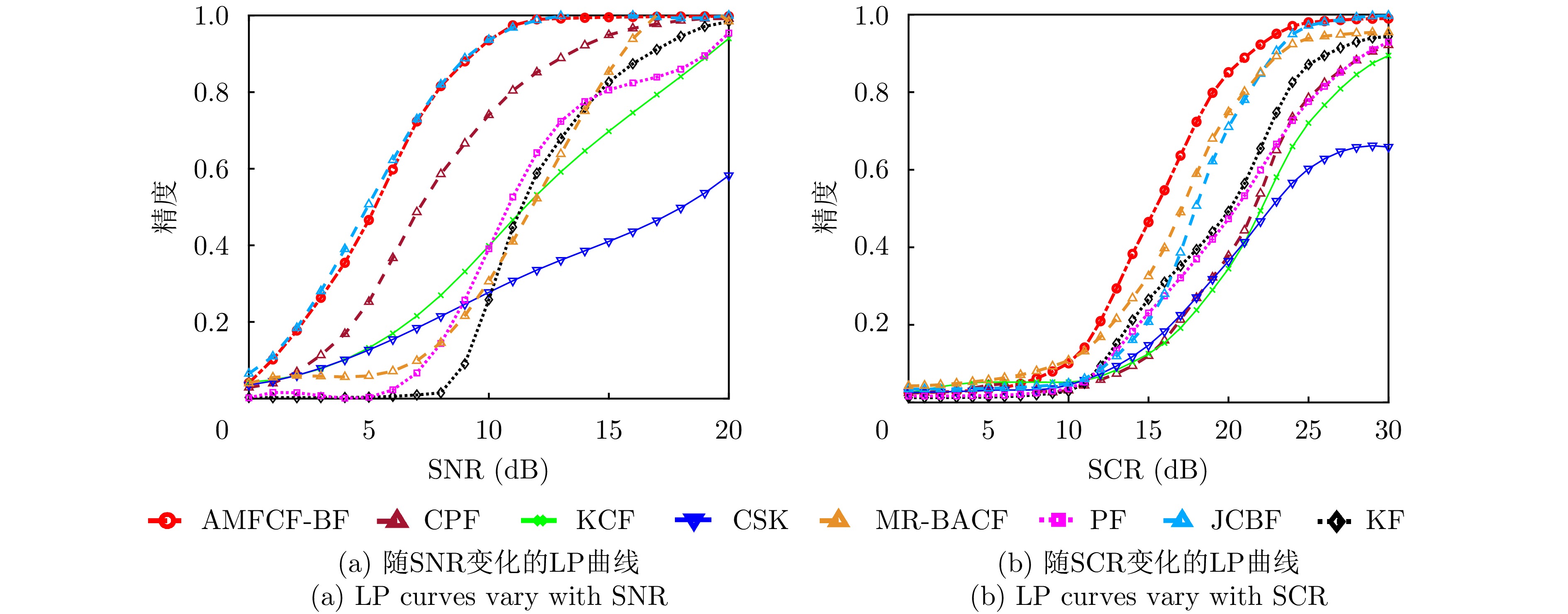
图 9 仿真实验的LP变化曲线,阈值取为12像素
Figure 9. LP curves on the simulated dataset at $\gamma $ = 12 pixels
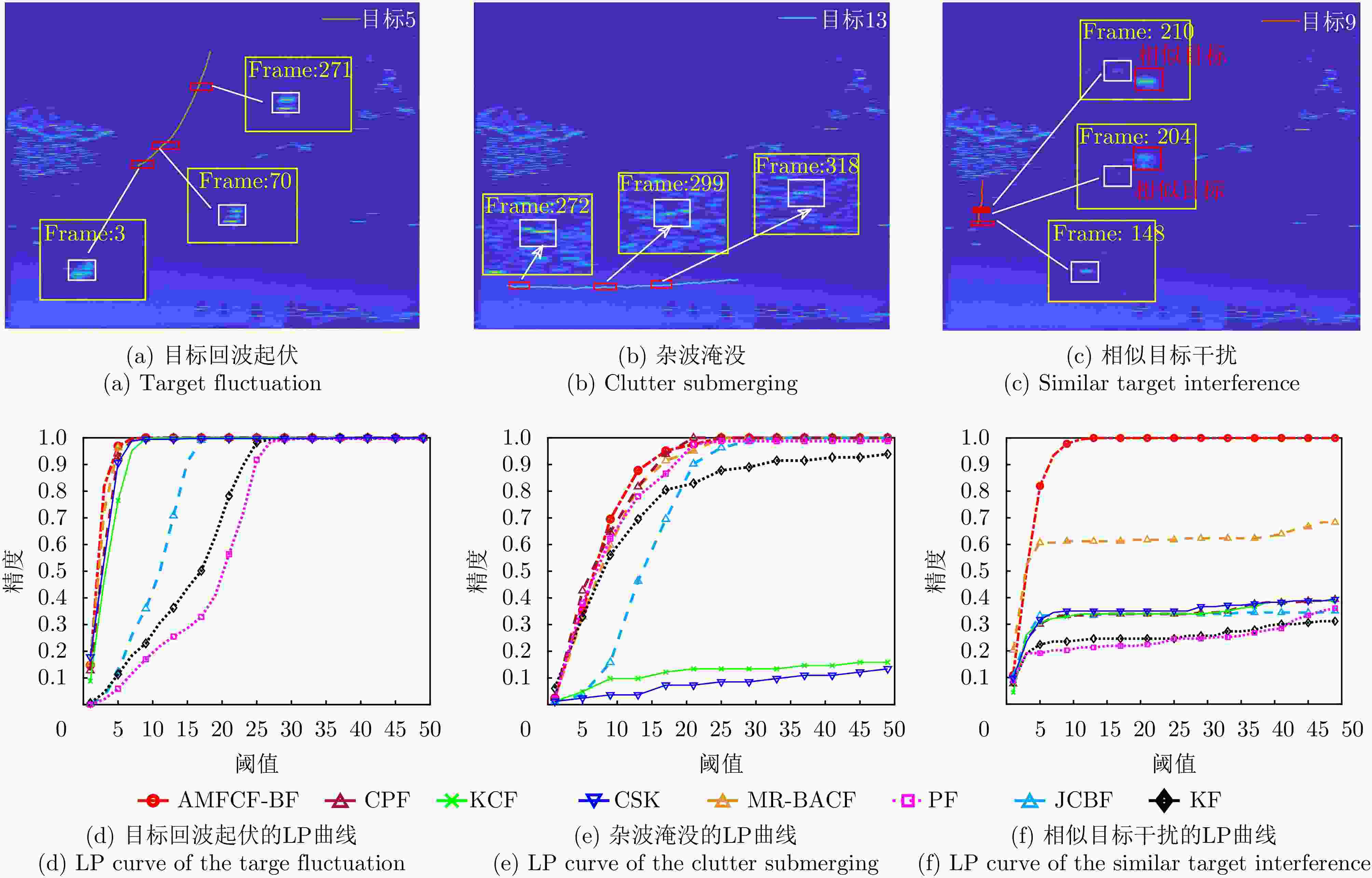
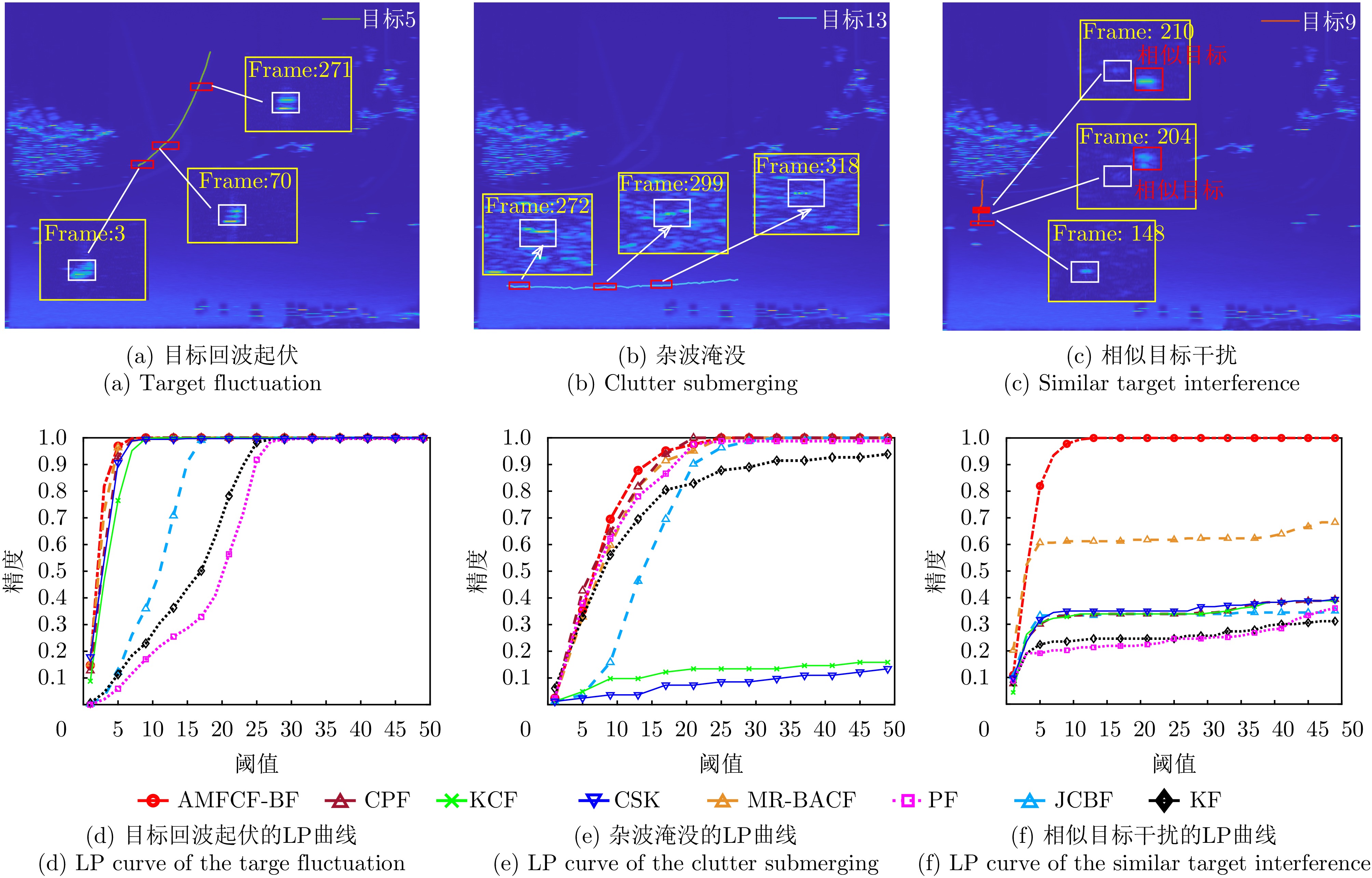
图 10 实测数据中各类目标的跟踪场景及LP曲线
Figure 10. The tracking scenarios and LP curves of various types of targets in the measured data
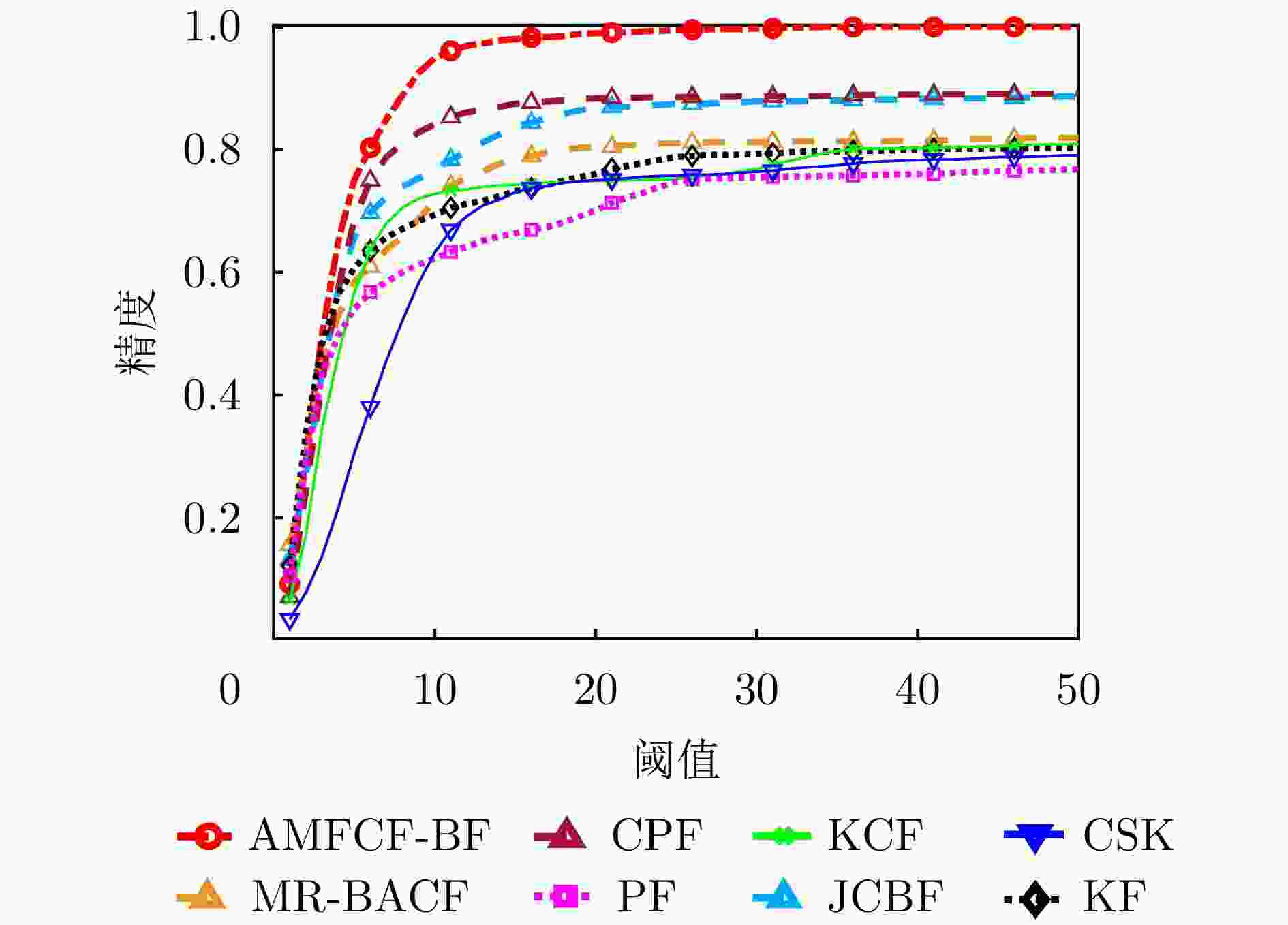
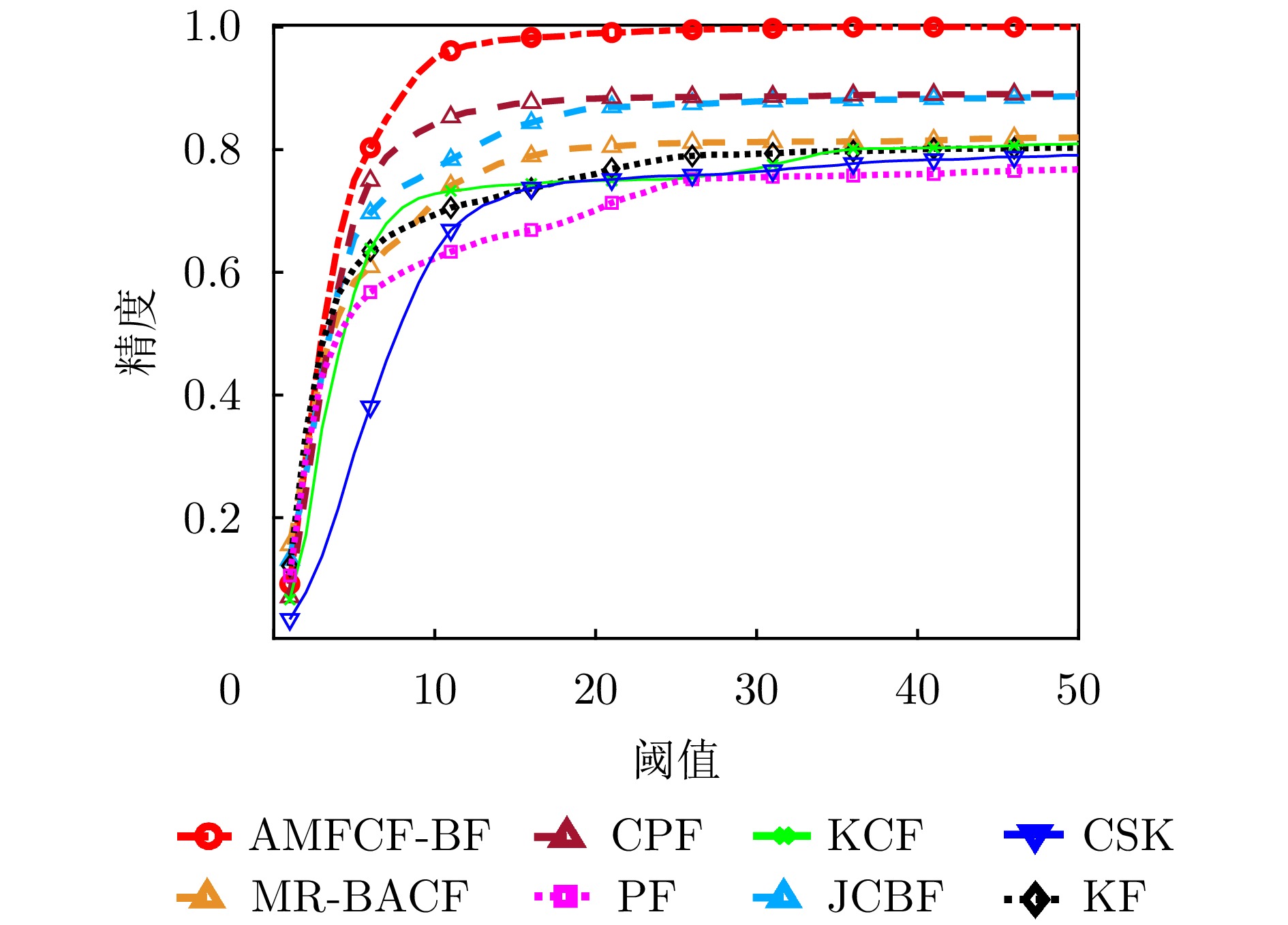
图 11 实测数据集中所有目标的平均LP曲线
Figure 11. The average LP curve of all targets in the measured dataset
表 1 雷达参数设置
Table 1. Radar parameter setting
参数 指标 工作频率 9.3~9.5 GHz 输出功率 50 W 天线带宽 1.2°@ –3 dB 扫描转速 24 r/min 距离维分辨单元 6 m 方位维分辨单元 360°/ 5120 脉冲重复频率 1.6 kHz 海况 约为3级  下载: 导出CSV
下载: 导出CSV
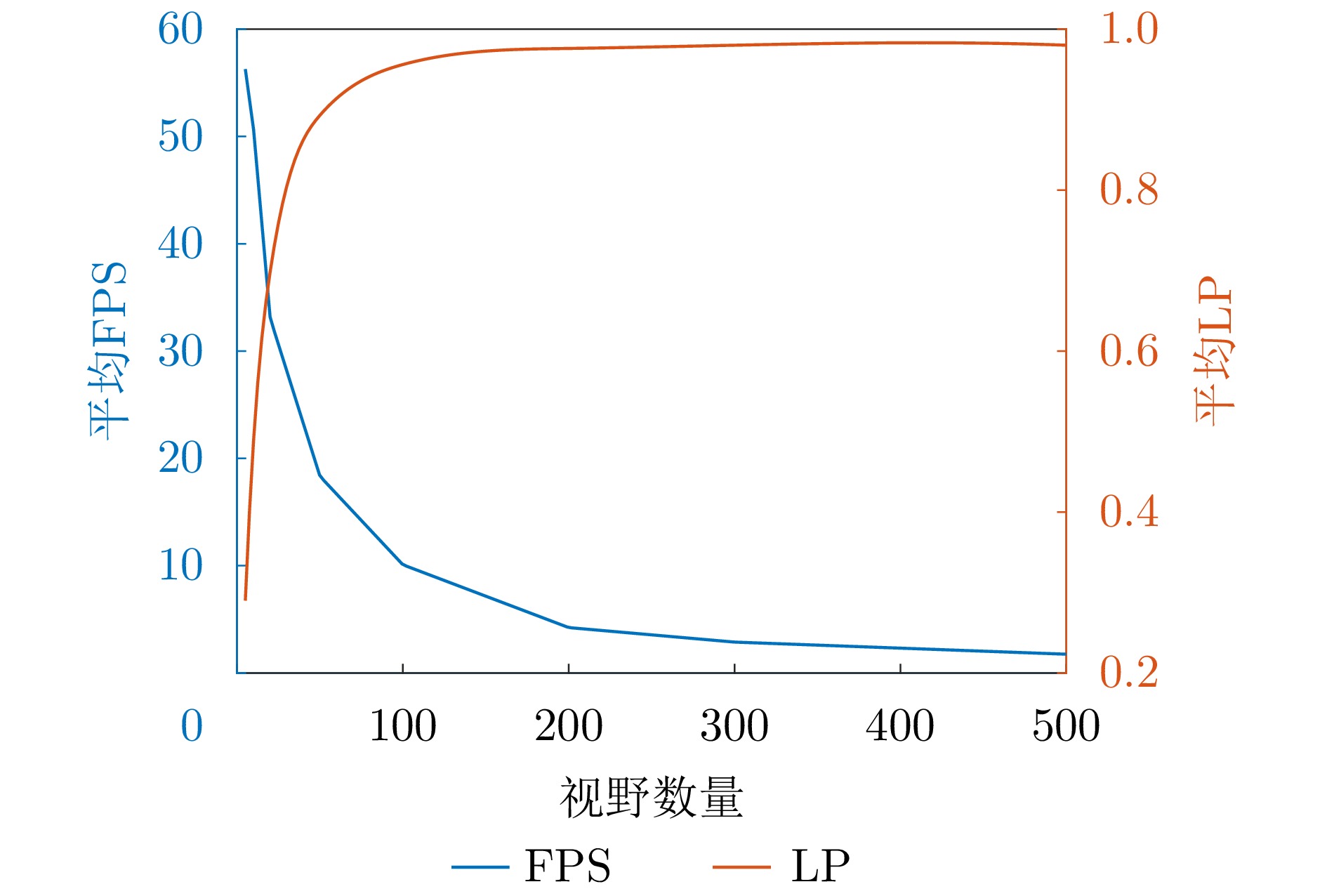
表 2 不同视野数量下的平均性能指标对比
Table 2. Comparison of average performance metrics for different numbers of fields
视野数量 CLE$ \downarrow $ LP$ \uparrow $ FPS$ \downarrow $ 5 38.32 0.29 56.27 10 29.10 0.49 50.61 20 18.71 0.70 33.05 50 9.57 0.89 18.33 100 6.81 0.96 10.08 200 3.66 0.98 4.23 300 3.86 0.98 2.88 500 3.60 0.98 1.75 注:$ \downarrow $表示得分越低性能越好,$ \uparrow $表示得分越高越好,加粗数值表示最优。
下载: 导出CSV
表 3 跟踪器的计算效率
Table 3. Computational efficiency of the tracker
跟踪器 FPS$ \uparrow $ AMFCF-BF 10.08 MR-BACF 5.88 JCBF 40.54 CPF 11.03 KCF 169.83 CSK 915.95 KF 3353.00 PF 635.00 注:$ \uparrow $表示得分越高越好。
下载: 导出CSV
表 4 实测数据中各目标的经验信杂比
Table 4. Empirical SCR of the targets in real data
目标 SCR (dB) 1 23.2 2 31.8 3 31.5 4 23.3 5 33.2 6 18.4 7 30.2 8 24.1 9 19.0 10 20.1 11 18.9 12 19.5 13 17.0 14 14.9
下载: 导出CSV
表 5 实测数据中的CLE分数(像素)
Table 5. CLE scores in the measured dataset (pixel)
目标 AMFCF-BF MR-BACF JCBF CPF KCF CSK KF PF 1 2.73 6.51 2.63 4.17 4.07 3.96 3.01 2.73 2 2.04 1.85 3.14 2.63 3.42 5.08 2.18 2.42 3 7.89 6.83 3.69 3.23 5.93 8.24 2.01 2.08 4 6.88 10.70 3.94 3.95 4.24 7.67 5.97 9.51 5 2.18 2.45 10.04 2.47 3.17 15.14 15.11 17.94 6 2.34 45.55 48.00 48.20 44.40 46.85 49.69 48.45 7 3.97 1.79 1.82 4.66 3.97 6.90 2.47 2.89 8 1.85 20.30 2.32 4.85 2.57 22.31 2.45 3.13 9 2.76 19.75 33.67 36.85 38.47 32.75 37.31 37.84 10 3.41 1.94 3.03 3.34 3.30 7.46 2.38 2.92 11 3.46 3.31 3.95 4.04 3.98 18.44 6.03 35.60 12 1.79 3.18 6.33 2.80 3.96 5.78 2.43 3.18 13 7.69 8.33 7.37 14.09 47.02 46.12 12.44 8.90 14 2.09 47.60 2.58 3.51 3.76 5.41 49.08 49.34 平均 3.47 12.86 9.46 9.41 12.31 16.56 13.75 16.21 注:加粗数值为最优。
下载: 导出CSV
-
[1] KIM D Y, RISTIC B, GUAN R, et al. A Bernoulli track-before-detect filter for interacting targets in maritime radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(3): 1981–1991. doi: 10.1109/TAES.2021.3054715. [2] 关键. 雷达海上目标特性综述[J]. 雷达学报, 2020, 9(4): 674–683. doi: 10.12000/JR20114.GUAN Jian. Summary of marine radar target characteristics[J]. Journal of Radars, 2020, 9(4): 674–683. doi: 10.12000/JR20114. [3] 柳超, 王月基. 对海探测雷达多目标跟踪技术综述[J]. 雷达学报, 2020, 10(1): 100–115. doi: 10.12000/JR20081.LIU Chao and WANG Yueji. Review of multi-target tracking technology for marine radar[J]. Journal of Radars, 2021, 10(1): 100–115. doi: 10.12000/JR20081. [4] LI Yangfan, WANG Nan, LI Wei, et al. Object tracking in satellite videos with distractor-occlusion-aware correlation particle filters[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5605412. doi: 10.1109/TGRS.2024.3353298. [5] WARD K, TOUGH R, and WATTS S. Sea Clutter: Scattering, the K Distribution and Radar Performance[M]. 2nd ed. London: The Institution of Engineering and Technology, 2013. doi: 10.1049/PBRA025E. [6] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084.XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084. [7] VIVONE G, BRACA P, and ERRASTI-ALCALA B. Extended target tracking applied to X-band marine radar data[C]. OCEANS 2015 – Genova, Genova, Italy, 2015: 1–6. doi: 10.1109/OCEANS-Genova.2015.7271630. [8] GRANSTRÖM K and BAUM M. A tutorial on multiple extended object tracking[J]. TechRxiv, 2022, in press. doi: 10.36227/techrxiv.19115858.v1. [9] MANNARI P, THARMARASA R, and KIRUBARAJAN T. Extended target tracking under multitarget tracking framework for convex polytope shapes[J]. Signal Processing, 2024, 217: 109321. doi: 10.1016/j.sigpro.2023.109321. [10] 陈辉, 边斌超, 连峰, 等. 基于Transformer复杂运动辨识的机动星凸形扩展目标跟踪方法[J]. 雷达学报(中英文), 2024, 13(3): 629–645. doi: 10.12000/JR24031.CHEN Hui, BIAN Binchao, LIAN Feng, et al. A novel method for tracking complex maneuvering star convex extended targets using Transformer network[J]. Journal of Radars, 2024, 13(3): 629–645. doi: 10.12000/JR24031. [11] BAR-SHALOM B Y, WILLETT P K, and TIAN Xin. Tracking and Data Fusion: A Handbook of Algorithms[M]. Storrs: Yaakov Bar-Shalom, 2011. [12] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362. [13] FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064. [14] ERRASTI-ALCALA B, FUSCALDO W, BRACA P, et al. Realistic extended target model for track before detect in maritime surveillance[C]. OCEANS 2015-Genova, Genova, Italy, 2015: 1–9. doi: 10.1109/OCEANS-Genova.2015.7271624. [15] ZEA A, FAION F, BAUM M, et al. Level-set random hypersurface models for tracking nonconvex extended objects[J]. IEEE Transactions on Aerospace & Electronic Systems, 2017, 52(6): 2990–3007. doi: 10.1109/TAES.2016.130704. [16] VIVONE G, BRACA P, GRANSTROM K, et al. Converted measurements Bayesian extended target tracking applied to X-band marine radar data[J]. Journal of Advances in Information Fusion (JAIF), 2016, 12(2): 189–210. [17] 柳超, 孙进平, 陈小龙, 等. 结合幅度信息的扩展目标随机有限集跟踪方法[J]. 雷达学报, 2020, 9(4): 730–738. doi: 10.12000/JR19071.LIU Chao, SUN Jinping, CHEN Xiaolong, et al. Random finite set-based extended target tracking method with amplitude information[J]. Journal of Radars, 2020, 9(4): 730–738. doi: 10.12000/JR19071. [18] GRANSTROM K, BAUM M, and REUTER S. Extended object tracking: Introduction, overview and applications[J]. Journal of Advances in Information Fusion, 2017, 12(2): 139–174. doi: 10.48550/arXiv.1604.00970. [19] LERRO D and BAR-SHALOM Y. Automated tracking with target amplitude information[C]. 1990 American Control Conference, San Diego, USA, 1990: 2875–2880. doi: 10.23919/ACC.1990.4791244. [20] KIM D and HWANG I. Dynamic model-based feature aided data association filter in target tracking[J]. IET Radar, Sonar & Navigation, 2020, 14(2): 279–289. doi: 10.1049/iet-rsn.2019.0381. [21] ZHU Yingpei, WANG Zhen, YIN Yupei, et al. Feature-aided multi-target tracking method in sea clutter using scanning radar data[C]. 2021 IEEE 6th International Conference on Signal and Image Processing, Nanjing, China, 2021: 615–619. doi: 10.1109/ICSIP52628.2021.9688716. [22] BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters[C]. 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, USA, 2010: 2544–2550. doi: 10.1109/CVPR.2010.5539960. [23] YUAN Di, CHANG Xiaojun, LI Zhihui, et al. Learning adaptive spatial-temporal context-aware correlation filters for UAV tracking[J]. ACM Transactions on Multimedia Computing, Communications, and Applications (TOMM), 2022, 18(3): 70. doi: 10.1145/3486678. [24] DANELLJAN M, HÄGER G, SHAHBAZ KHAN F, et al. Learning spatially regularized correlation filters for visual tracking[C]. 2015 IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 4310–4318. doi: 10.1109/ICCV.2015.4900. [25] KUMAR A, VOHRA R, JAIN R, et al. Correlation filter based single object tracking: A review[J]. Information Fusion, 2024, 112: 102562. doi: 10.1016/j.inffus.2024.102562. [26] HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390. [27] ZHOU Yi, WANG Tian, HU Ronghua, et al. Multiple Kernelized Correlation Filters (MKCF) for extended object tracking using X-band marine radar data[J]. IEEE Transactions on Signal Processing, 2019, 67(14): 3676–3688. doi: 10.1109/TSP.2019.2917812. [28] ZHOU Yi, SU Hang, TIAN Shuai, et al. Multiple-kernelized-correlation-filter-based track-before-detect algorithm for tracking weak and extended target in marine radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 3411–3426. doi: 10.1109/TAES.2022.3150262. [29] LIU Jiaqi, WANG Zhen, CHENG Di, et al. Marine extended target tracking for scanning radar data using correlation filter and Bayes filter jointly[J]. Remote Sensing, 2022, 14(23): 5937. doi: 10.3390/rs14235937. [30] ZHANG Tianzhu, LIU Si, XU Changsheng, et al. Correlation particle filter for visual tracking[J]. IEEE Transactions on Image Processing, 2018, 27(6): 2676–2687. doi: 10.1109/TIP.2017.2781304. [31] GORDON N J and SALMOND D J. Novel approach to nonlinear/non-Gaussian Bayesian state estimation[J]. IEE Proceedings F (Radar and Signal Processing), 1993, 40(2): 107–113. doi: 10.1049/ip-f-2.1993.0015. [32] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174–188. doi: 10.1109/78.978374. [33] REID D. An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1979, 24(6): 843–854. doi: 10.1109/TAC.1979.1102177. [34] BLACKMAN S S. Multiple hypothesis tracking for multiple target tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1): 5–18. doi: 10.1109/MAES.2004.1263228. [35] BAR-SHALOM Y. Tracking methods in a multitarget environment[J]. IEEE Transactions on Automatic Control, 1978, 23(4): 618–626. doi: 10.1109/TAC.1978.1101790. [36] MUSICKI D, EVANS R, and STANKOVIC S. Integrated probabilistic data association (IPDA)[C]. 31st IEEE Conference on Decision and Control, Tucson, USA, 1992: 3796–3798. doi: 10.1109/CDC.1992.370951. [37] CARPENTER J, CLIFFORD P, and FEARNHEAD P. Improved particle filter for nonlinear problems[J]. IEE Proceedings - Radar, Sonar and Navigation, 1999, 146(1): 2–7. doi: 10.1049/ip-rsn:19990255. [38] DE VLIEGER J H and MEYLING R H J G. Maximum likelihood estimation for long-range target tracking using passive sonar measurements[J]. IEEE Transactions on Signal Processing, 1992, 40(5): 1216–1225. doi: 10.1109/78.134483. [39] ZHANG Xudong, LI Hongbin, and HIMED B. Maximum likelihood delay and Doppler estimation for passive sensing[J]. IEEE Sensors Journal, 2019, 19(1): 180–188. doi: 10.1109/JSEN.2018.2875664. [40] MUSICKI D, EVANS R, and STANKOVIC S. Integrated probabilistic data association[J]. IEEE Transactions on Automatic Control, 1994, 39(6): 1237–1241. doi: 10.1109/9.293185. [41] YUAN Xinru, LIU Jiaqi, CHENG Di, et al. Motion-regularized background-aware correlation filter for marine radar target tracking[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: 3504705. doi: 10.1109/LGRS.2023.3276790. [42] HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]. 12th European Conference on Computer Vision, Florence, Italy, 2012: 702–715. doi: 10.1007/978-3-642-33765-9_50. [43] KALMAN R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82(1): 35–45. doi: 10.1115/1.3662552. [44] DALAL N and TRIGGS B. Histograms of oriented gradients for human detection[C]. 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, USA, 2005: 886–893. doi: 10.1109/CVPR.2005.177. [45] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089.LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089. [46] 陈小龙, 何肖阳, 邓振华, 等. 雷达微弱目标智能化处理技术与应用[J]. 雷达学报(中英文), 2024, 13(3): 501–524. doi: 10.12000/JR23160.CHEN Xiaolong, HE Xiaoyang, DENG Zhenhua, et al. Radar intelligent processing technology and application for weak target[J]. Journal of Radars, 2024, 13(3): 501–524. doi: 10.12000/JR23160. [47] RISTIC B, VO B N, CLARK D, et al. A metric for performance evaluation of multi-target tracking algorithms[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3452–3457. doi: 10.1109/TSP.2011.2140111. [48] WANG Zhen, LIU Jiaqi, YUAN Xinru, et al. A dynamic model-based Doppler-adaptive correlation filter for maritime radar target tracking[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5101415. doi: 10.1109/TGRS.2023.3346998. -

计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

