
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Forward-looking Multi-channel Synthetic Aperture Radar Imaging and Array Attitude Error Compensation
-
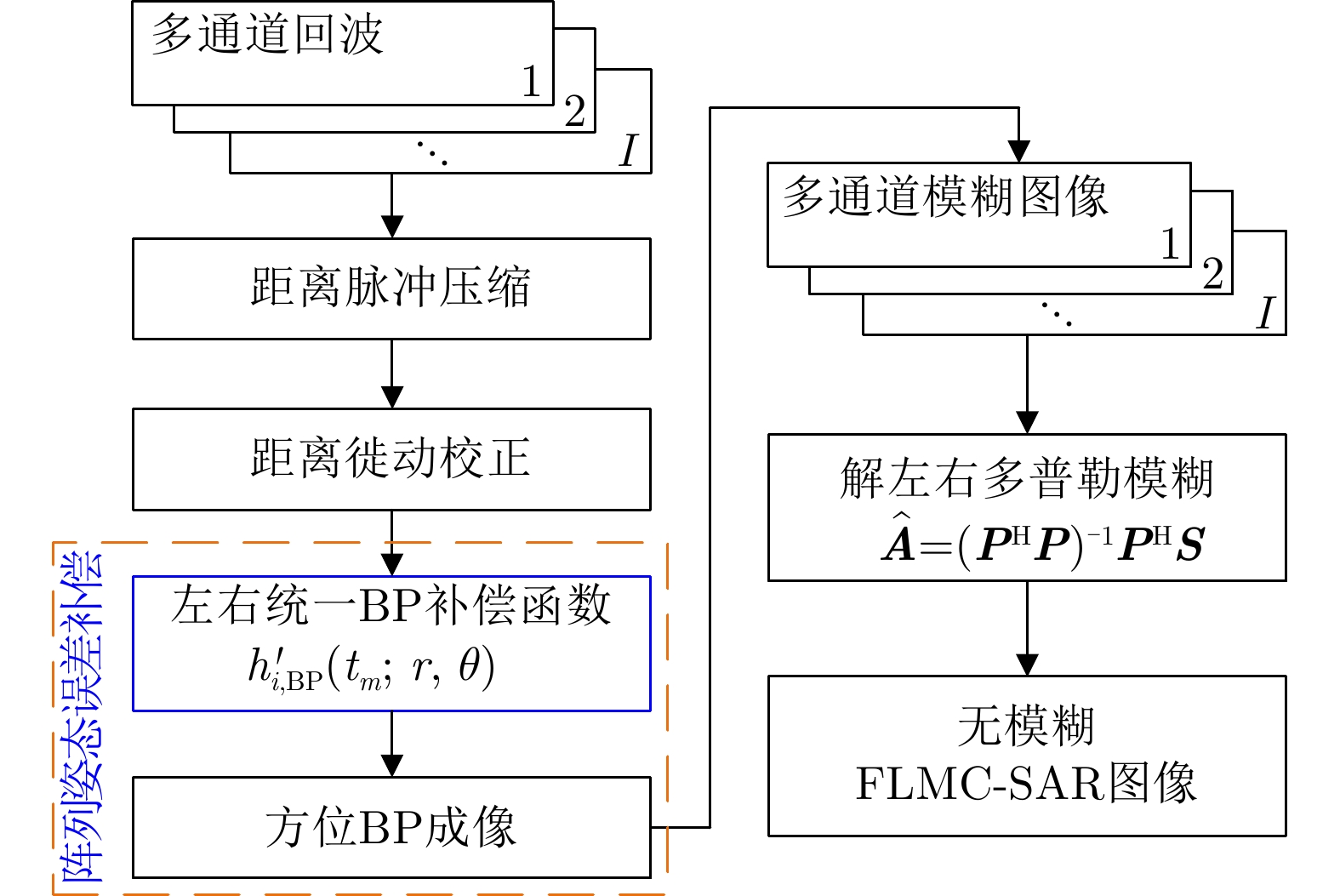
摘要: 针对前视合成孔径雷达(SAR)成像中的左右多普勒模糊问题,前视多通道SAR (FLMC-SAR)通过波束形成可实现多普勒解模糊成像。然而阵列偏角误差和时变姿态误差会导致目标的空时特性失配,进而影响左右多普勒解模糊成像的性能。该文提出了一种FLMC-SAR成像及阵列姿态误差补偿方法,首先建立了FLMC-SAR三维阵列偏角误差和时变平台姿态误差模型,分析了二维空时谱平面中目标的空时特性匹配机理,建立分析阵列姿态误差带来的空时特性失配在空时平面中的表征模型,然后基于误差的非左右空变特性,提出在BP函数中添加误差补偿相位统一补偿左右目标的阵列姿态误差。仿真实验证明所提方法可实现FLMC-SAR阵列姿态校正及误差补偿,提升了前视多普勒模糊抑制性能,保证了前视成像的方位分辨性能。
-
关键词:
- 前视多通道SAR (FLMC-SAR) /
- 前视成像 /
- 阵列姿态误差 /
- 多普勒解模糊 /
- 方位分辨
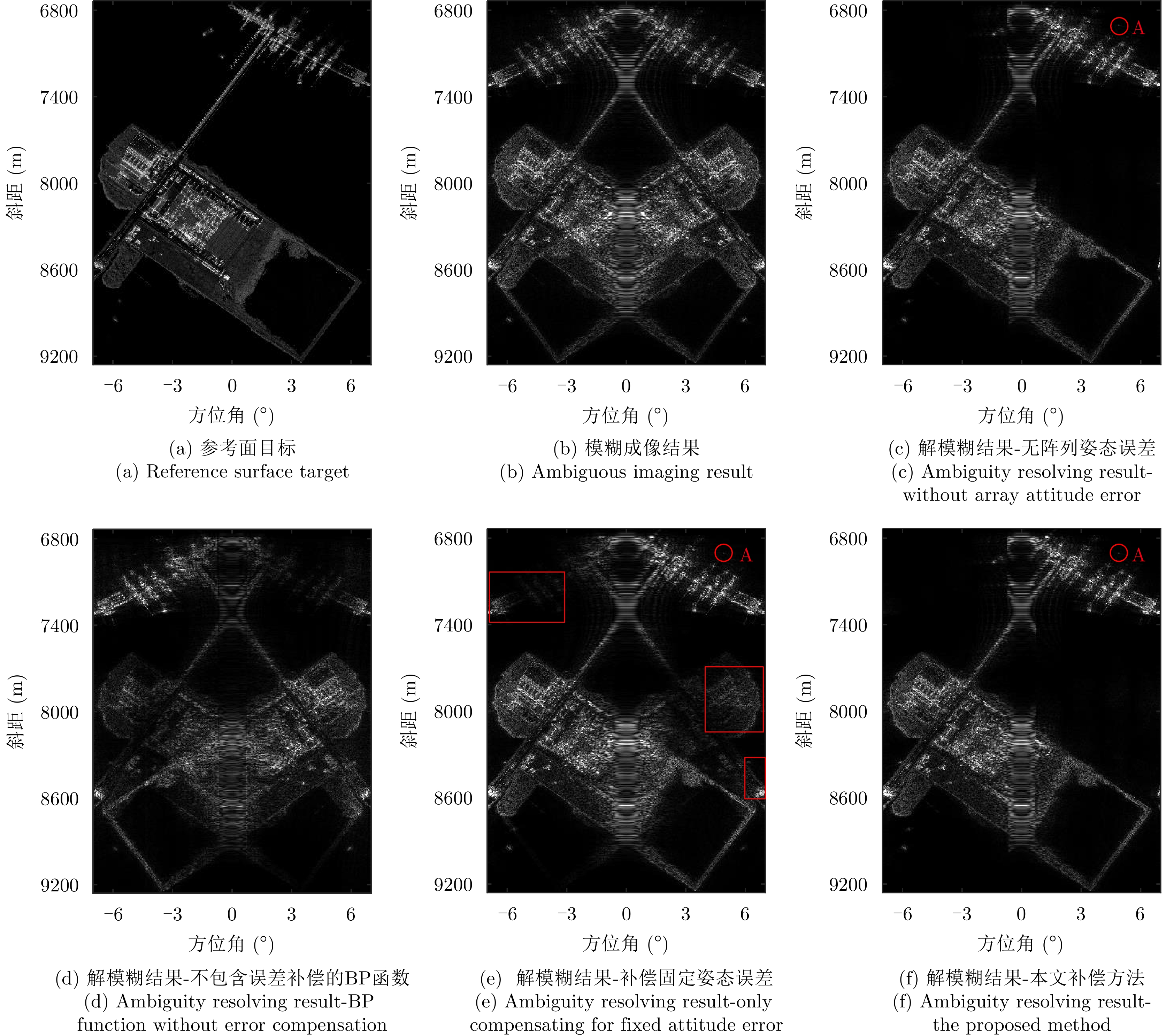
Abstract: To solve the problem of left-right Doppler ambiguity in forward-looking Synthetic Aperture Radar (SAR) imaging, Forward-Looking Multi-Channel SAR (FLMC-SAR) can achieve Doppler ambiguity resolving imaging through beamforming. However, array deviation angle and time-varying platform attitude errors lead to the mismatch between the space and time characteristics of a target, which affects the Doppler ambiguity resolving imaging performance. This study proposes an FLMC-SAR imaging and array attitude error compensation method. First, the three-dimensional FLMC-SAR array deviation-angle error and time-varying platform attitude error models are established. The mechanism of matching the spatiotemporal characteristics of targets in the two-dimensional spatiotemporal spectrum plane is analyzed. In addition, a representation model is established to study the spatiotemporal characteristics mismatch caused by the array attitude error in the spatiotemporal plane. Thereafter, based on the non-left-right spatial variation of the error, we propose a method of adding an error compensation phase to the back projection function to uniformly compensate the array attitude error of left-right symmetric targets. The results of simulation experiments show that the proposed method can achieve FLMC-SAR array attitude correction and error compensation, enhance the performance of forward-looking Doppler ambiguity suppression, and ensure the azimuth resolution performance of forward-looking imaging. -
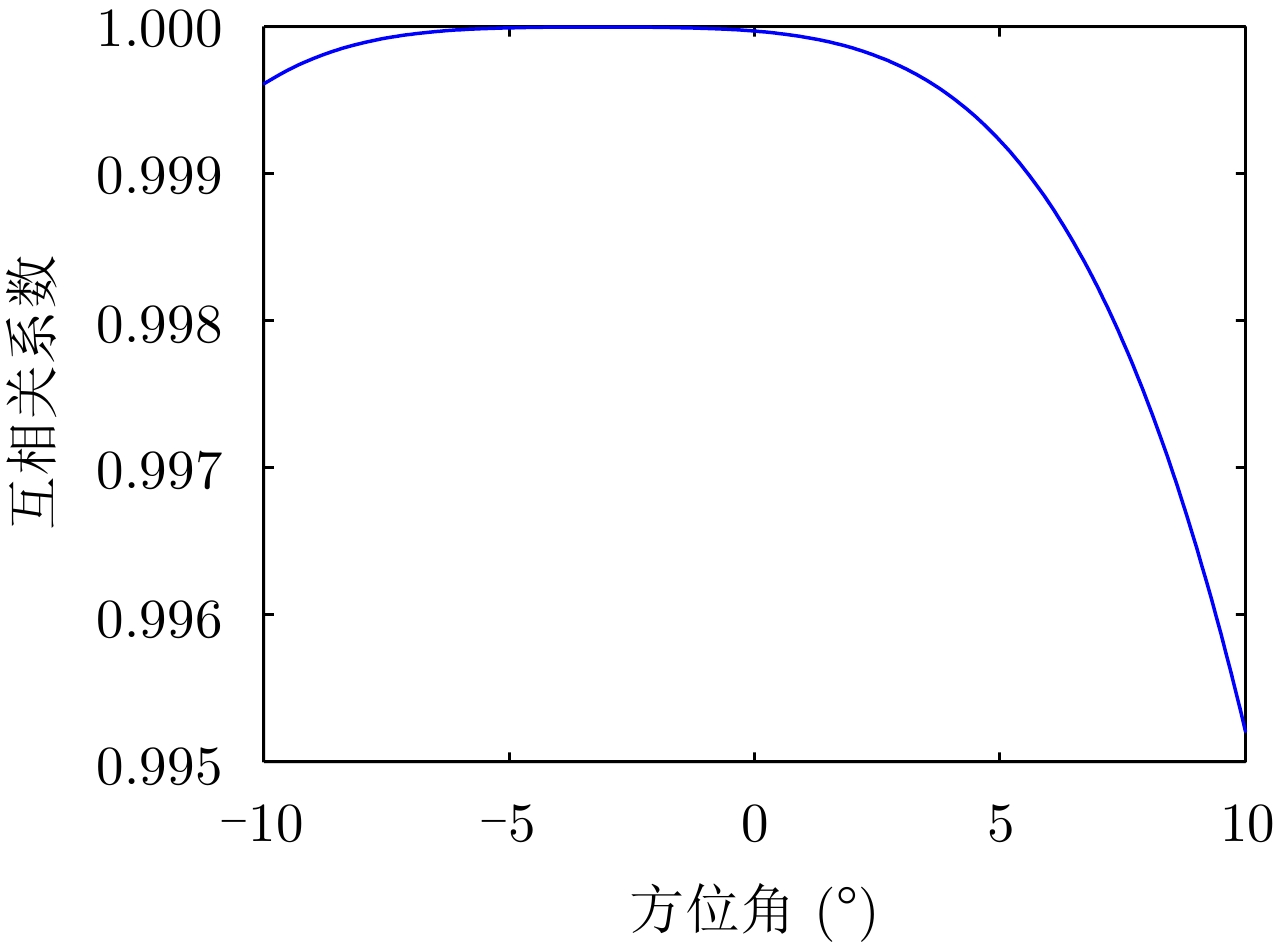
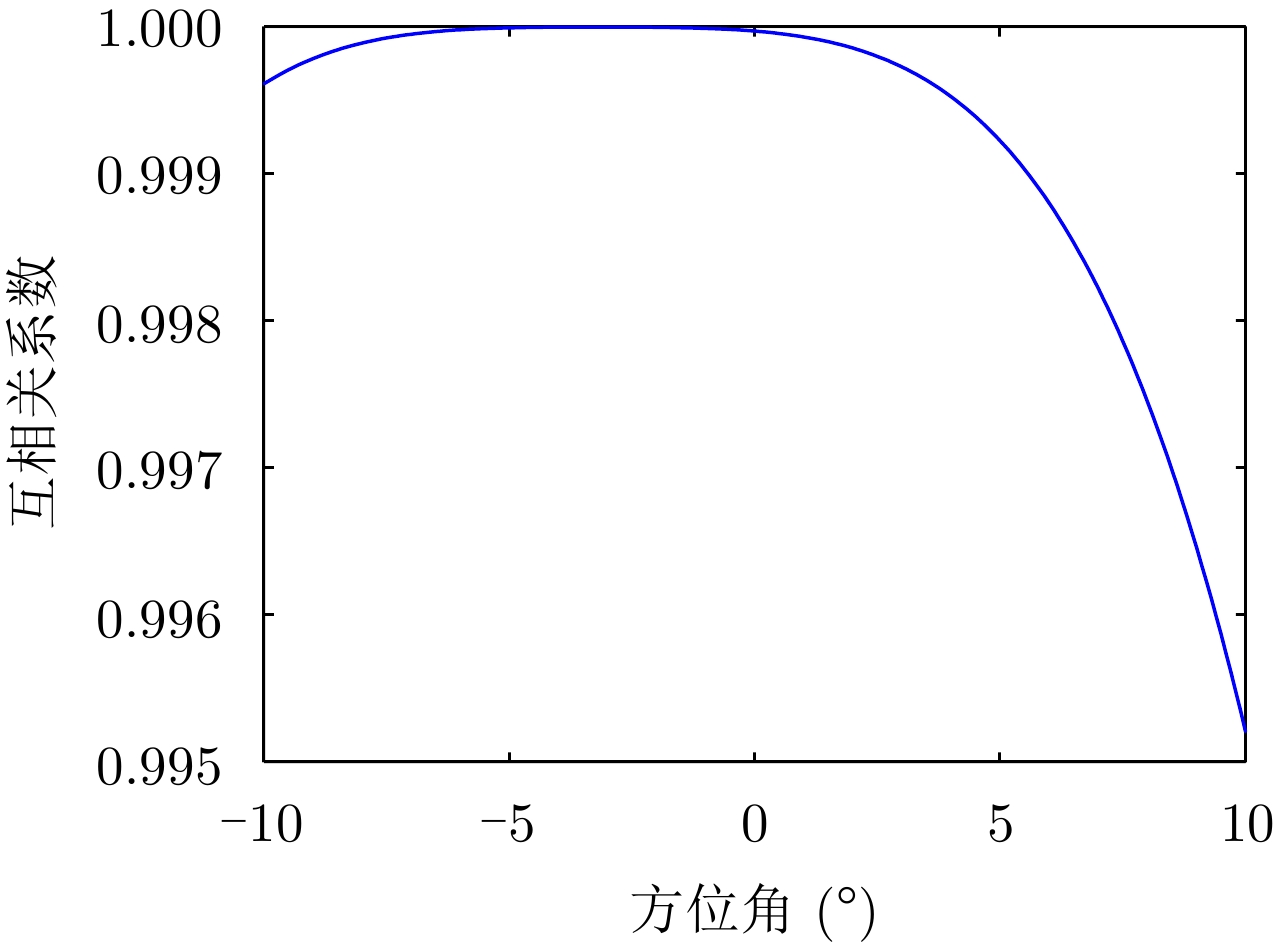
图 5 采用
$\Delta \theta $ 近似前后的导向矢量互相关曲线Figure 5. Cross correlation curve of steering vectors before and after using
$\Delta \theta $ approximation
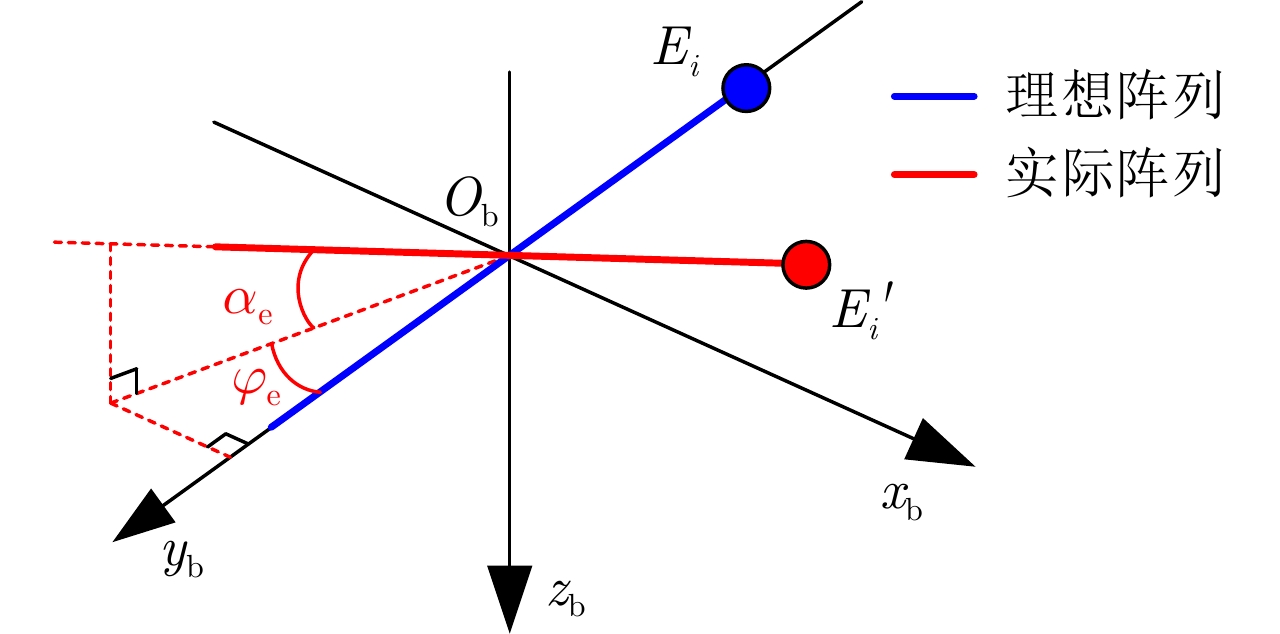
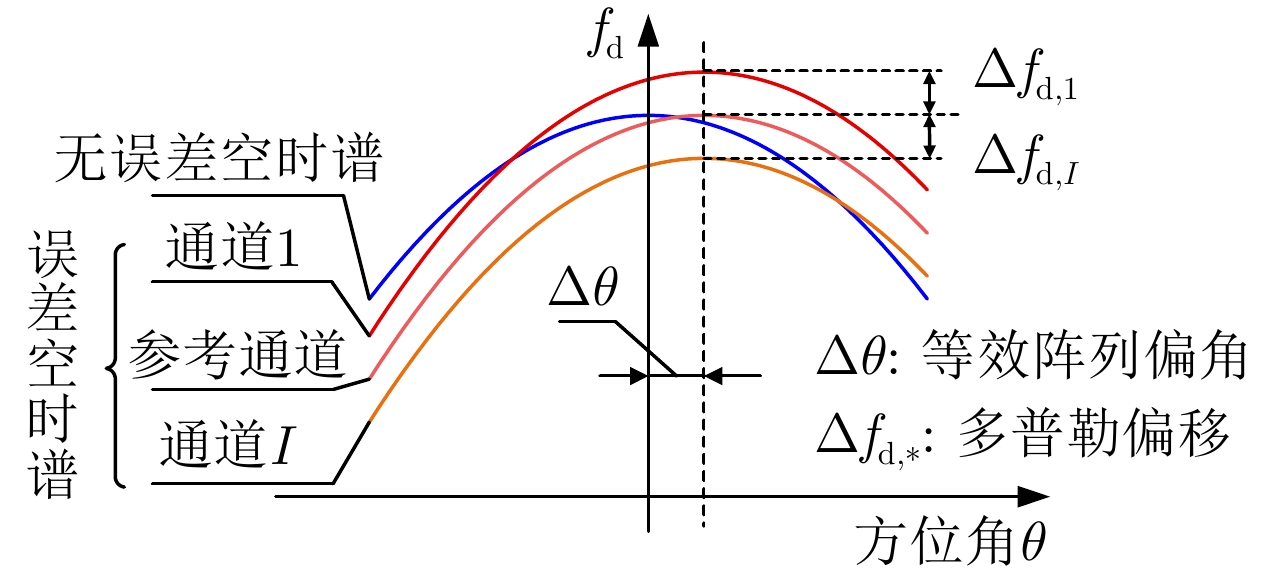
图 6 阵列姿态误差导致的空时特性失配
Figure 6. Space-time characteristic mismatch caused by array attitude error

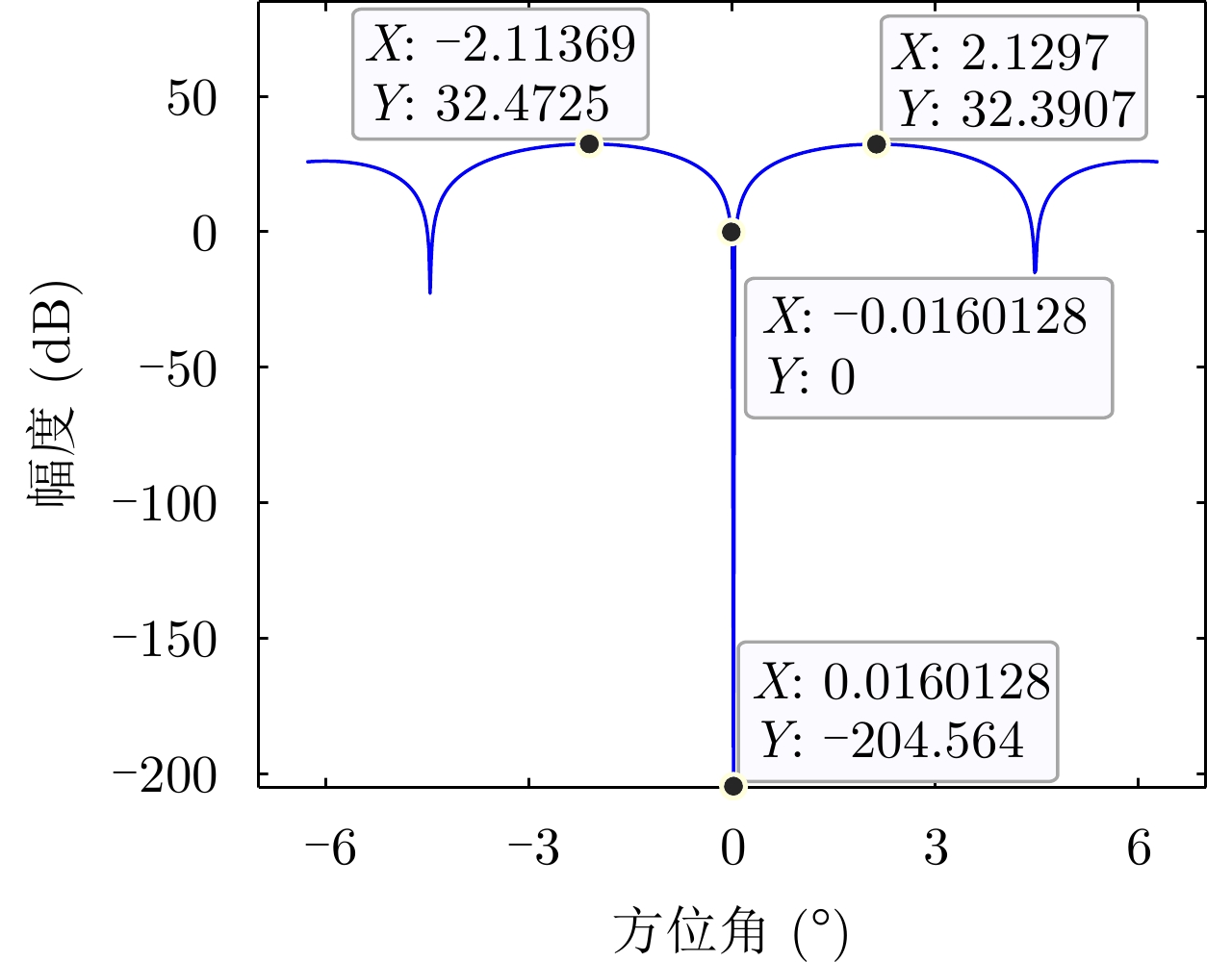
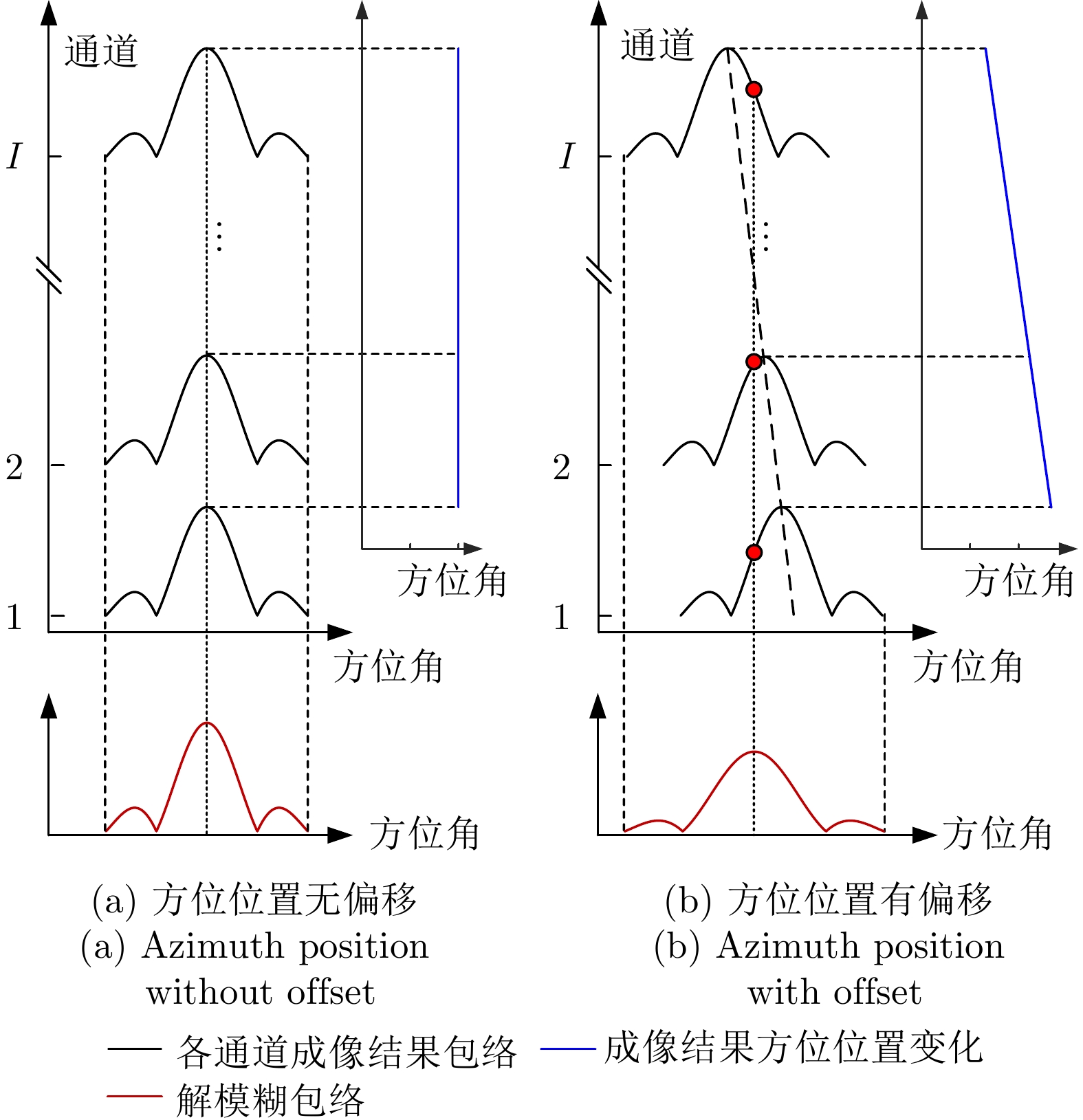
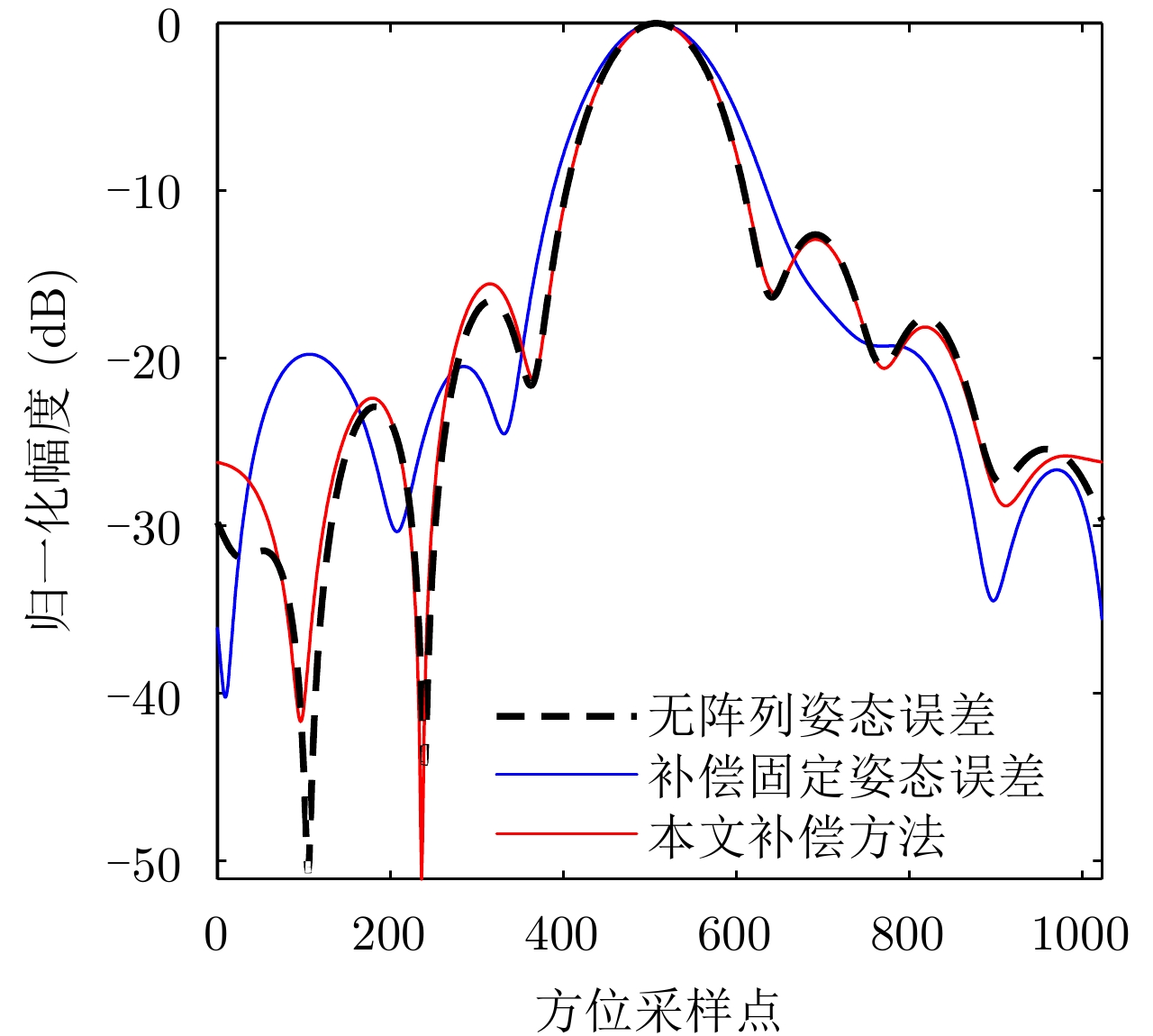
图 7 模糊成像结果方位位置对解模糊的影响
Figure 7. The influence of azimuth position of ambiguous images on ambiguity resolving
表 1 仿真系统参数
Table 1. Simulation parameters of system
参数 数值 参数 数值 载频(GHz) 30 脉冲重复频率(kHz) 4 发射带宽(MHz) 50 场景中心斜距(m) 8000 采样率(MHz) 60 合成孔径时间(s) 2 平台速度(m/s) 80 通道数 5 平台高度(m) 4000 通道间距(m) 0.043  下载: 导出CSV
下载: 导出CSV
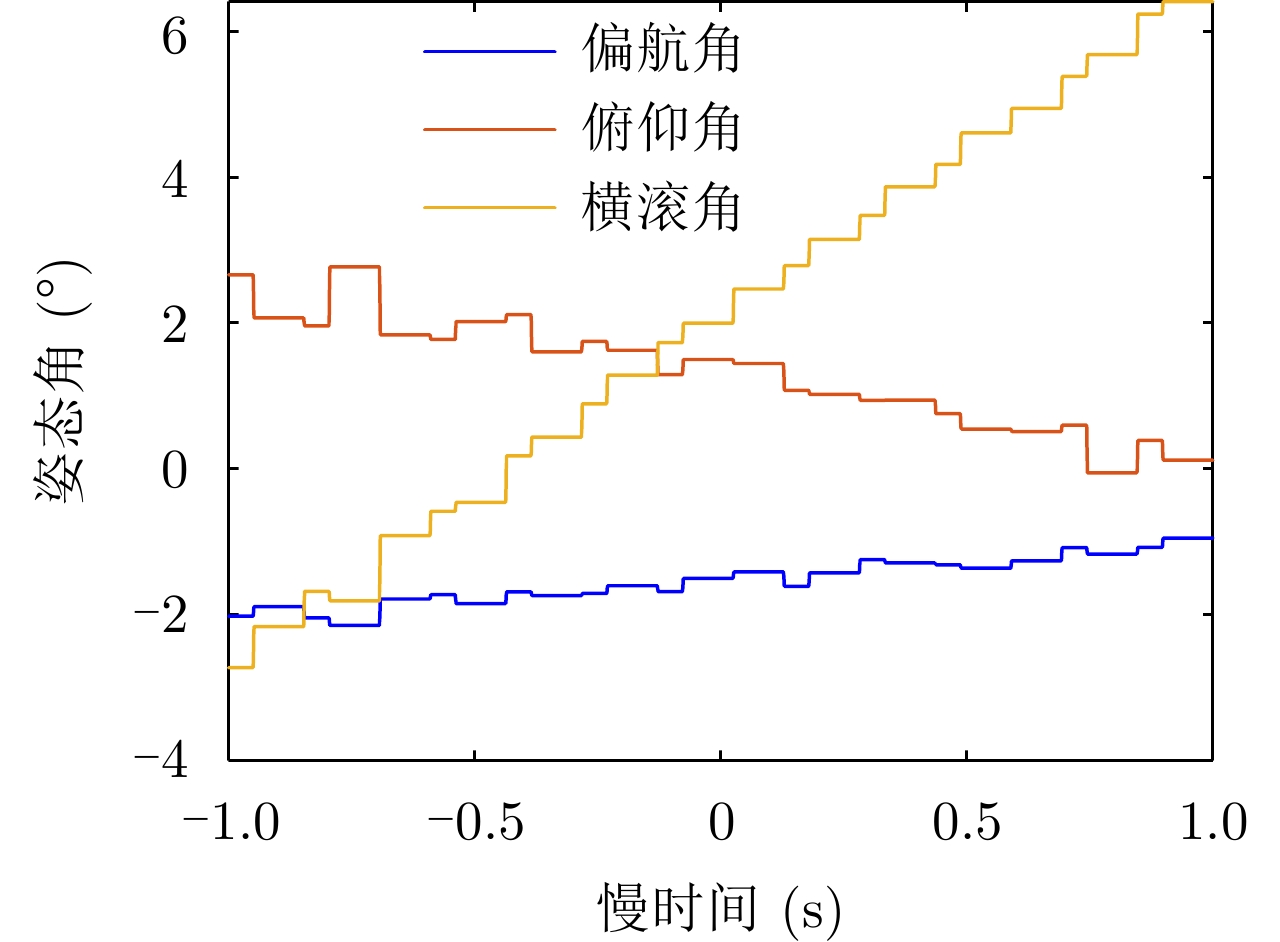
表 2 仿真误差参数
Table 2. Simulation parameters of errors
参数 数值 参数 数值 俯仰偏角误差(°) 3 方位偏角误差(°) –2 初始偏航角(°) –1.5 偏航角速度(°/s) 0.53 初始俯仰角(°) 1.5 俯仰角速度(°/s) –1.24 初始横滚角(°) 2 横滚角速度(°/s) 4.71
下载: 导出CSV
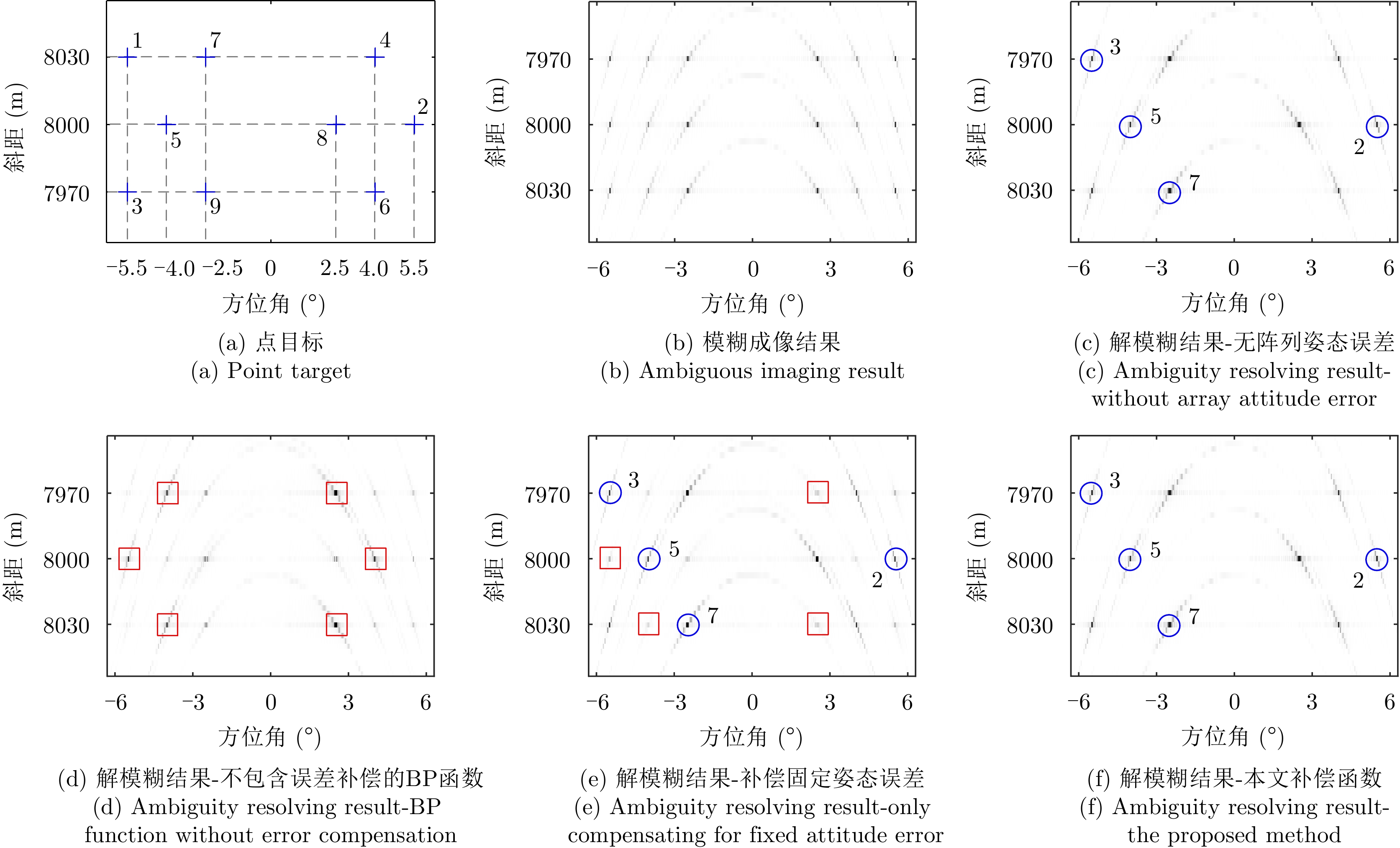
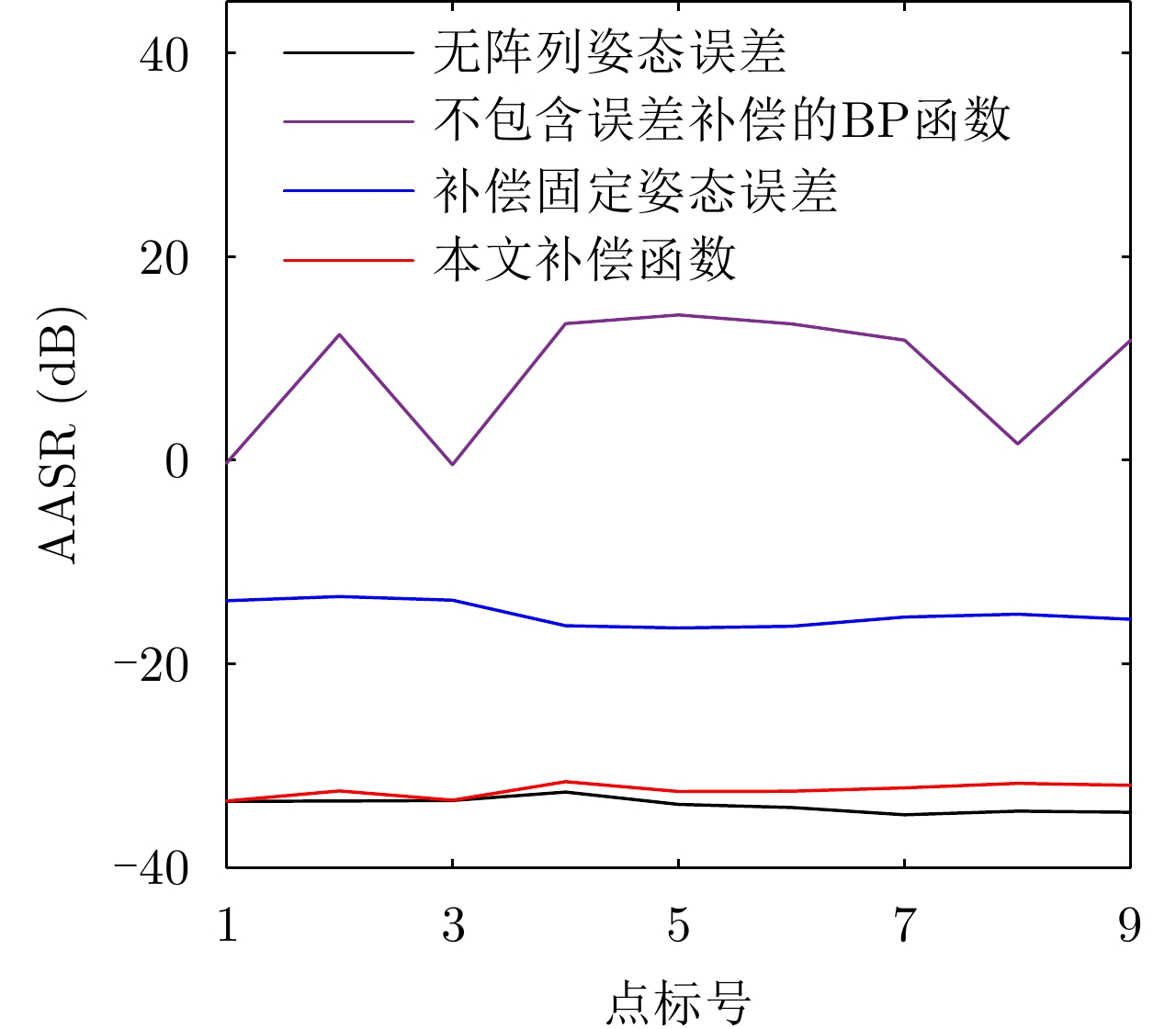
表 3 点目标成像性能对比
Table 3. Comparison of point target imaging performance
参数 目标 无阵列姿态误差 仅补偿固定姿态误差 本文补偿方法 –3 dB IRW (m) 2 2.67 3.00 2.67 3 2.67 2.99 2.67 5 3.67 4.16 3.66 7 5.88 6.64 5.88 PSLR (dB) 2 –13.26 –18.43 –13.23 3 –13.26 –18.44 –13.21 5 –13.26 –18.87 –13.19 7 –13.26 –18.45 –13.17 ISLR (dB) 2 –9.91 –15.52 –9.90 3 –9.91 –15.46 –9.87 5 –9.99 –16.00 –9.91 7 –10.16 –15.92 –10.08
下载: 导出CSV
-
[1] KRIEGER G, MITTERMAYER J, BUCKREUSS S, et al. Sector imaging radar for enhanced vision[J]. Aerospace Science and Technology, 2003, 7(2): 147–158. doi: 10.1016/S1270-9638(02)01189-6 [2] SONG Xuan, LI Yachao, ZHANG Tinghao, et al. Focusing high-maneuverability bistatic forward-looking SAR using extended azimuth nonlinear chirp scaling algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5240814. doi: 10.1109/TGRS.2022.3228803 [3] HU Ruizhi, RAO B S M R, MURTADA A, et al. Automotive squint-forward-looking SAR: High resolution and early warning[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(4): 904–912. doi: 10.1109/JSTSP.2021.3064175 [4] SHAHREZAEI I H and KIM H C. A monostatic forward-looking staring spotlight SAR raw data generation and hybrid-domain image formation modifications based on extended azimuth nonlinear chirp scaling autofocusing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2329–2358. doi: 10.1109/TAES.2022.3212993 [5] 卢景月, 张磊, 王冠勇. 前视多通道合成孔径雷达解模糊成像方法[J]. 电子与信息学报, 2018, 40(12): 2820–2825. doi: 10.11999/JEIT180177LU Jingyue, ZHANG Lei, and WANG Guanyong. Ambiguity resolving and imaging algorithm for multi-channel forward-looking synthetic aperture radar[J]. Journal of Electronics&Information Technology, 2018, 40(12): 2820–2825. doi: 10.11999/JEIT180177 [6] LI Han, SUO Zhiyong, ZHENG Chengxin, et al. Study on airborne near-nadir TOPS SAR imaging with attitude angle error[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5240012. doi: 10.1109/TGRS.2022.3226221 [7] LU Jingyue, ZHANG Lei, HUANG Yan, et al. High-resolution forward-looking multichannel SAR imagery with array deviation angle calibration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(10): 6914–6928. doi: 10.1109/TGRS.2020.2977731 [8] KLARE J, WEISS M, PETERS O, et al. ARTINO: A new high resolution 3D imaging radar system on an autonomous airborne platform[C]. 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, USA, 2006: 3842–3845. [9] 杨泽民, 孙光才, 邢孟道, 等. 基于多通道联合自聚焦技术的机载三维SAR运动补偿[J]. 电子与信息学报, 2012, 34(7): 1581–1588. doi: 10.3724/SP.J.1146.2011.01365YANG Zemin, SUN Guangcai, XING Mengdao, et al. Motion compensation for airborne 3-D SAR based on joint multi-channel auto-focusing technology[J]. Journal of Electronics&Information Technology, 2012, 34(7): 1581–1588. doi: 10.3724/SP.J.1146.2011.01365 [10] 丁振宇, 谭维贤, 王彦平, 等. 基于波数域子孔径的机载三维SAR偏航角运动误差补偿[J]. 雷达学报, 2015, 4(4): 467–473. doi: 10.12000/JR15016DING Zhenyu, TAN Weixian, WANG Yanping, et al. Yaw angle error compensation for airborne 3-D SAR based on wavenumber-domain subblock[J]. Journal of Radars, 2015, 4(4): 467–473. doi: 10.12000/JR15016 [11] 孟智超. 前视多通道合成孔径雷达成像与抗干扰技术研究[D]. [硕士论文], 西安电子科技大学, 2021: 16–19.MENG Zhichao. Research on imaging and anti-interference of forward-look multichannel synthetic aperture radar[D]. [Master dissertation], Xidian University, 2021: 16–19. [12] 方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2005: 20.FANG Zhenping, CHEN Wanchun, and ZHANG Shuguang. Flight Dynamics of Aero Vehicles[M]. Beijing: Beihang University Press, 2005: 20. [13] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 139.BAO Zheng, XING Mengdao, and WANG Tong. Radar Imaging Technology[M]. Beijing: Publishing House of Electronics Industry, 2005: 139. [14] VILLANO M and KRIEGER G. Spectral-based estimation of the local azimuth ambiguity-to-signal ratio in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(5): 2304–2313. doi: 10.1109/TGRS.2013.2259244 -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

