
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
An Effective Method of Airborne Dual-frequency Interferometric Terrain Elevation Reconstruction
-
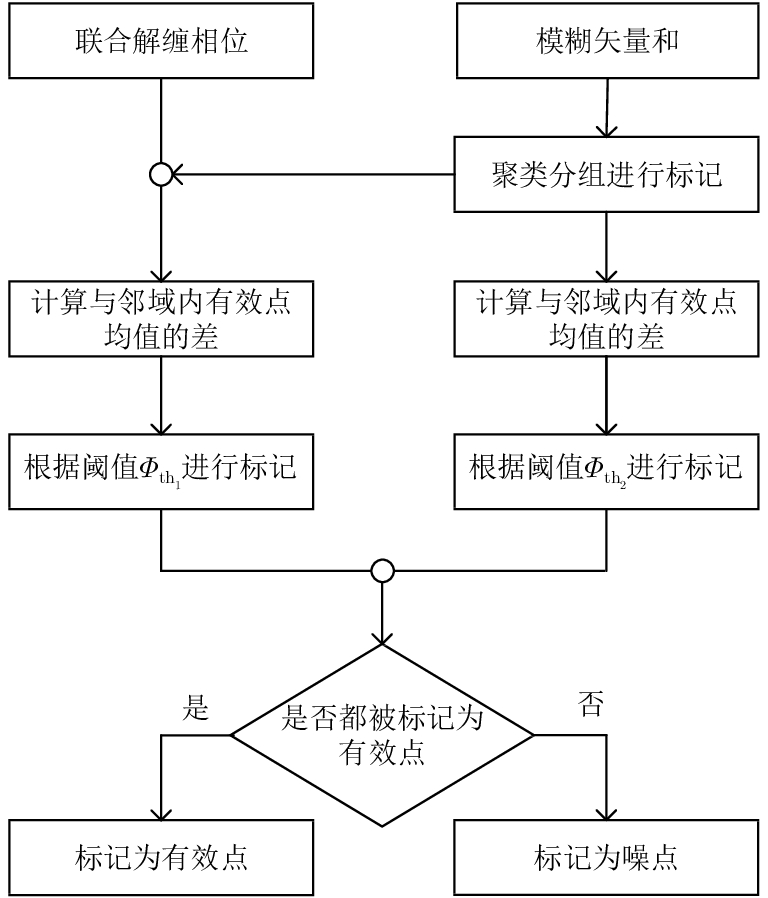
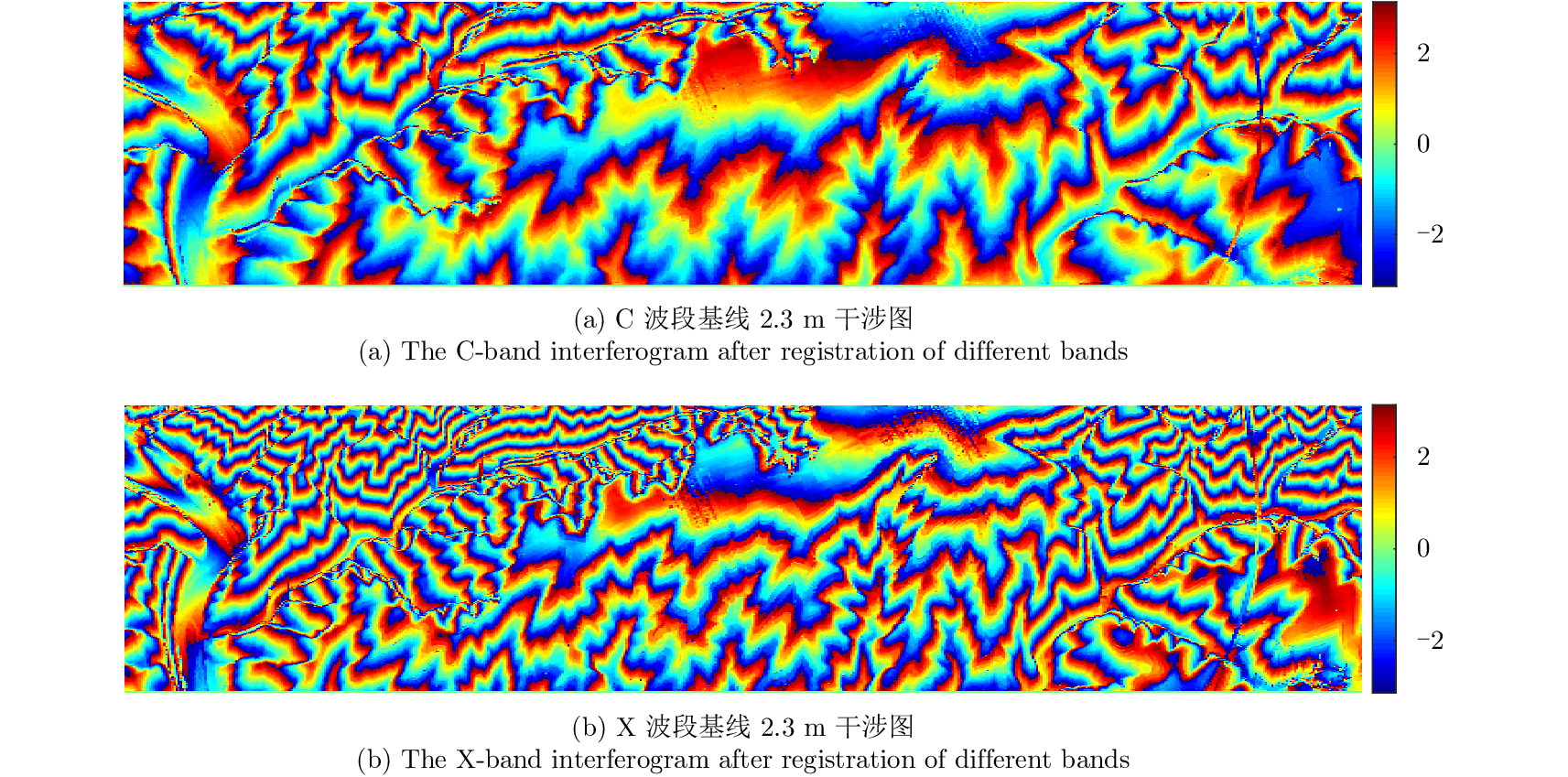
摘要: 双频联合解缠不需要满足Iton假设,因此双频干涉可以有效地提取地形起伏较大区域的高程信息。针对目前双频干涉处理中高程重建精度低的问题,该文提出了一种有效的双频干涉SAR地形高程重建方法。该方法对常规处理流程中的关键步骤进行了改进,首先在不同波段配准之前采用非局部参数估计(NL-InSAR)技术对幅度图、相干系数、干涉相位进行精确估计,利用各个波段滤波后的幅度信息来实现不同波段的干涉相位的配准。然后采用聚类分析技术对联合解缠相位标记有效点和噪点,并利用这些有效点对联合解缠相位进行均值滤波。用于实验的机载实测数据包括同一场景的C波段和X波段主、辅SAR图像复数据,在针对实测数据处理中,该方法取得了较好的高程重建结果。
-
关键词:
- 双频干涉 /
- 非局部参数估计(NL-InSAR) /
- 干涉图配准 /
- 变分能量项最大后验估计 /
- 聚类分析
Abstract: Dual-frequency joint phase unwrapping does not need to satisfy the Iton hypothesis, so dual-frequency interferometry can effectively extract elevation information from large terrain undulation areas. This paper presents an effective method for Dual-Frequency Interferometry (DFI) SAR terrain elevation reconstruction, aiming at the low precision of elevation reconstruction in DFI processing. This method improves the key steps in the conventional process. Firstly, Nonlocal Interferogram Estimation (NL-InSAR) technique is used to accurately estimate amplitude map, coherence coefficient, and Interferometric phase before the registration in different bands. After filtering, the filtered amplitude information of each band is used to realize the registration of Interferometric phase in different bands. Then clustering analysis technique is used to mark the effective points and noise points of unwrapping phase, and these effective points are used to filter the mean value of joint phase unwrapping. The airborne measured data used in the experiment include the complex data of C band and X band main and auxiliary SAR images of the same scene. In view of the measured data processing, the proposed method provides better results of elevation reconstruction. -
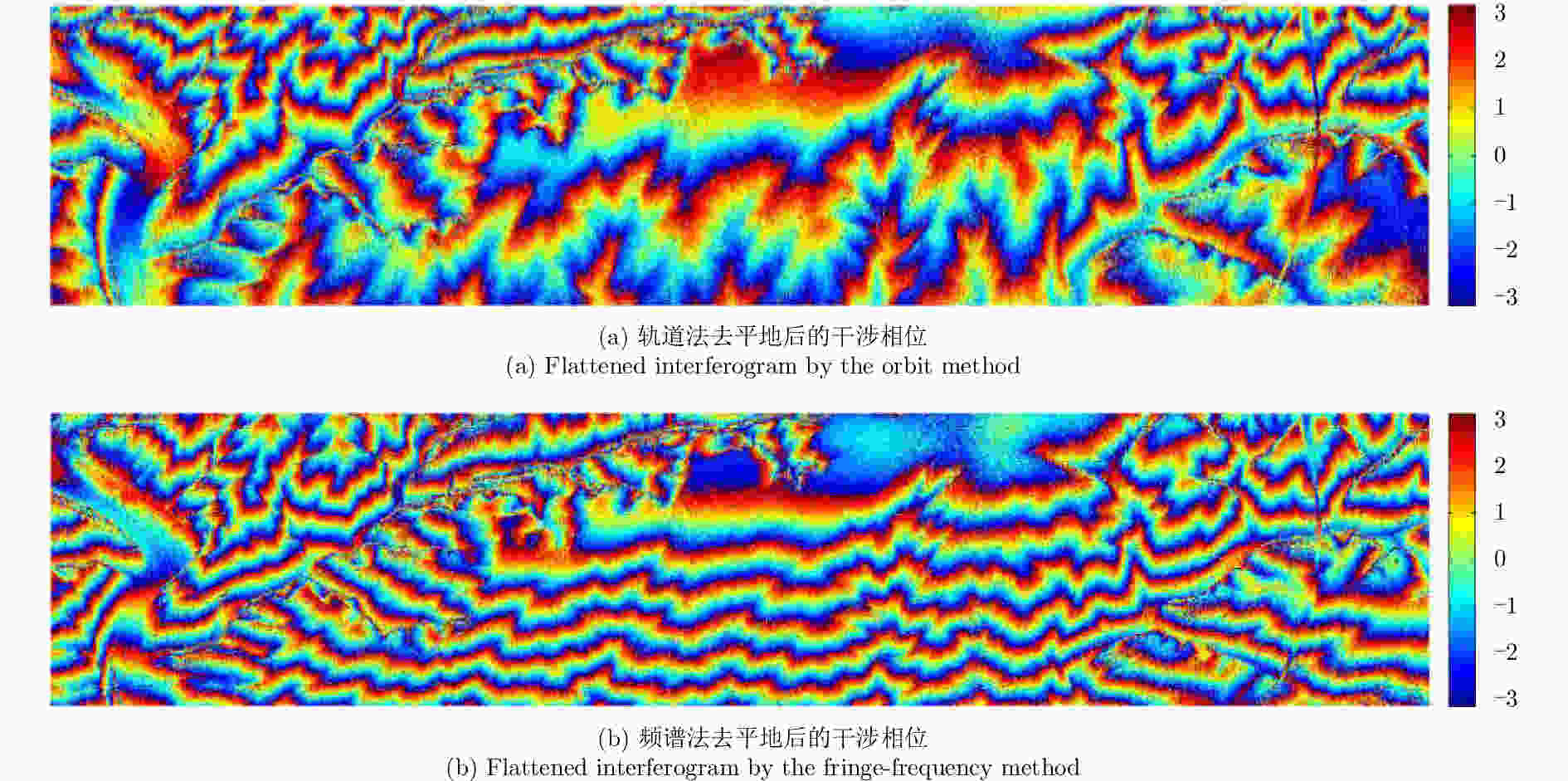
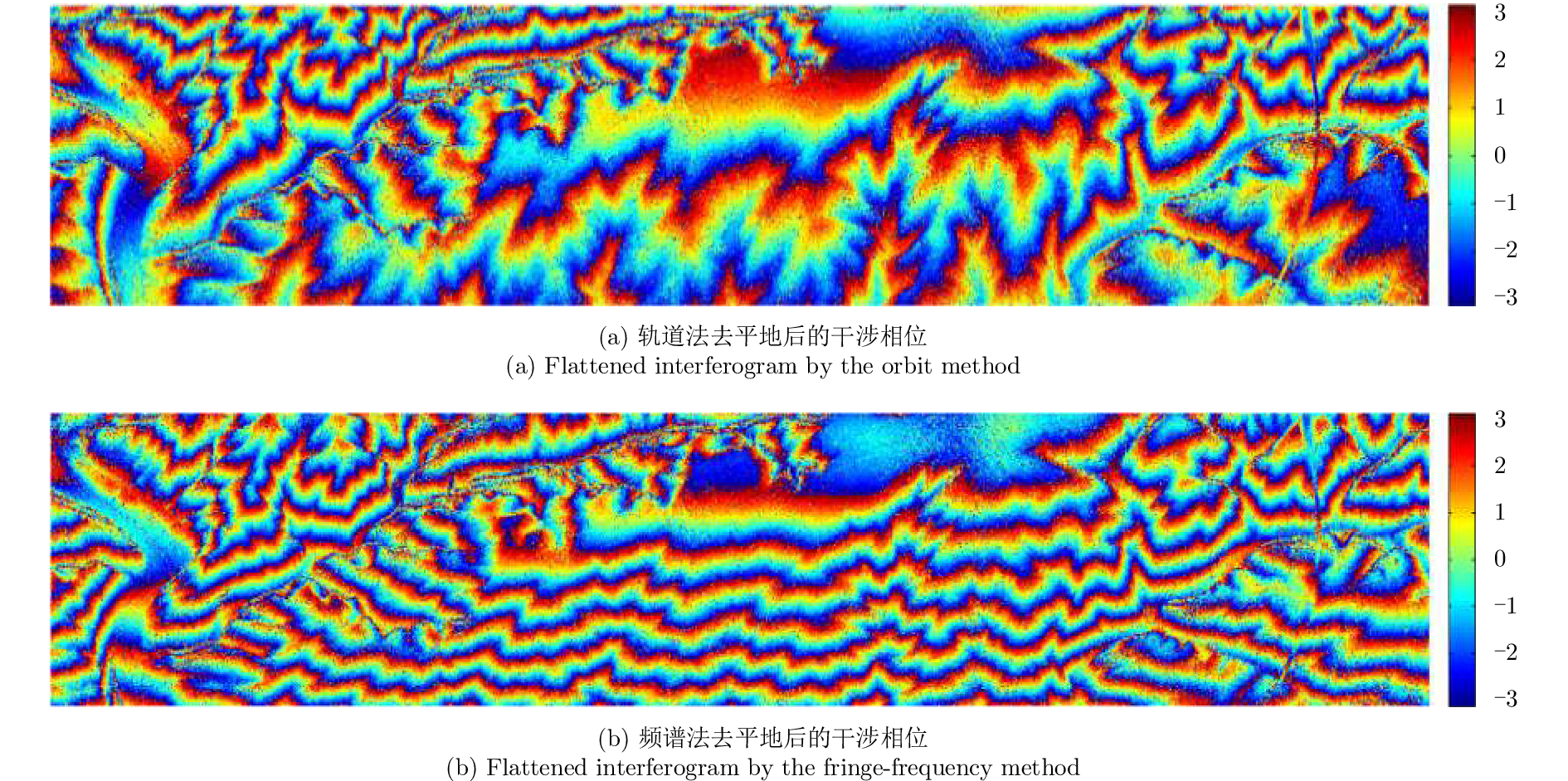
图 3 两种去平地方法去平地之后的干涉图
Figure 3. The two flattened interferograms removed flat-Earth phase
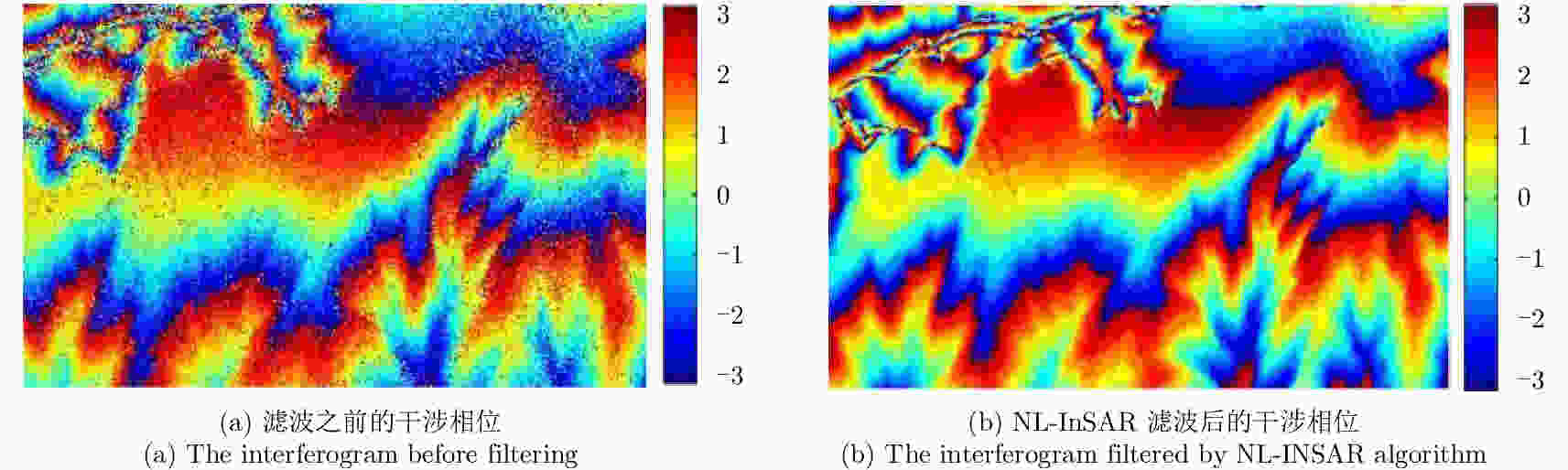
图 4 NL-InSAR滤波前后的干涉相位对比
Figure 4. Contrast between interferogram before filtering and filtered interferogram
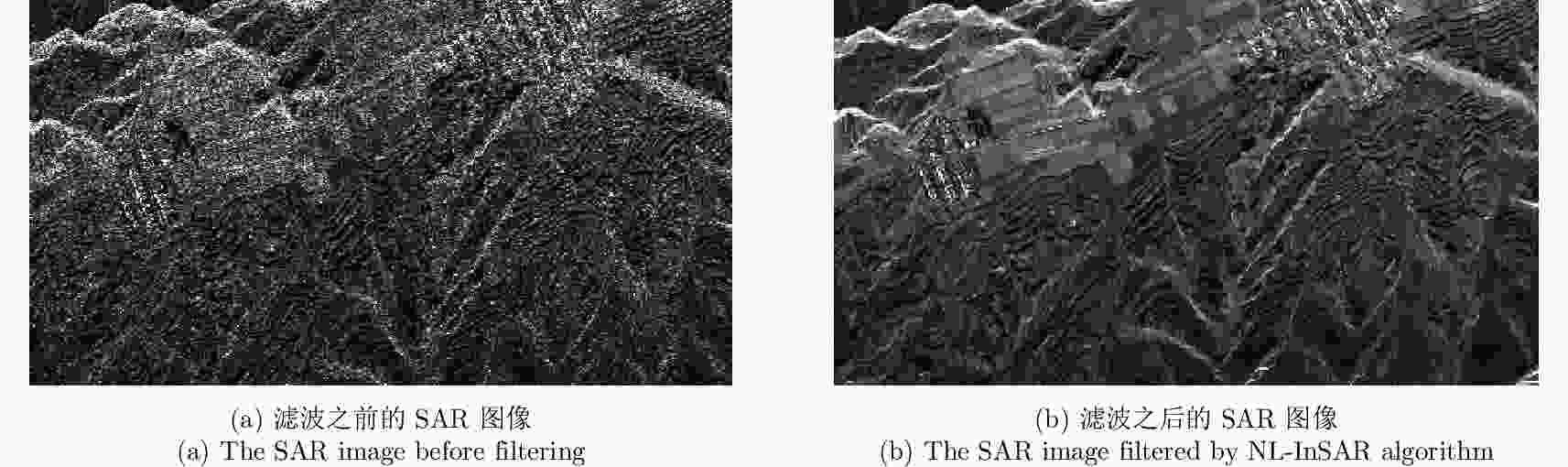
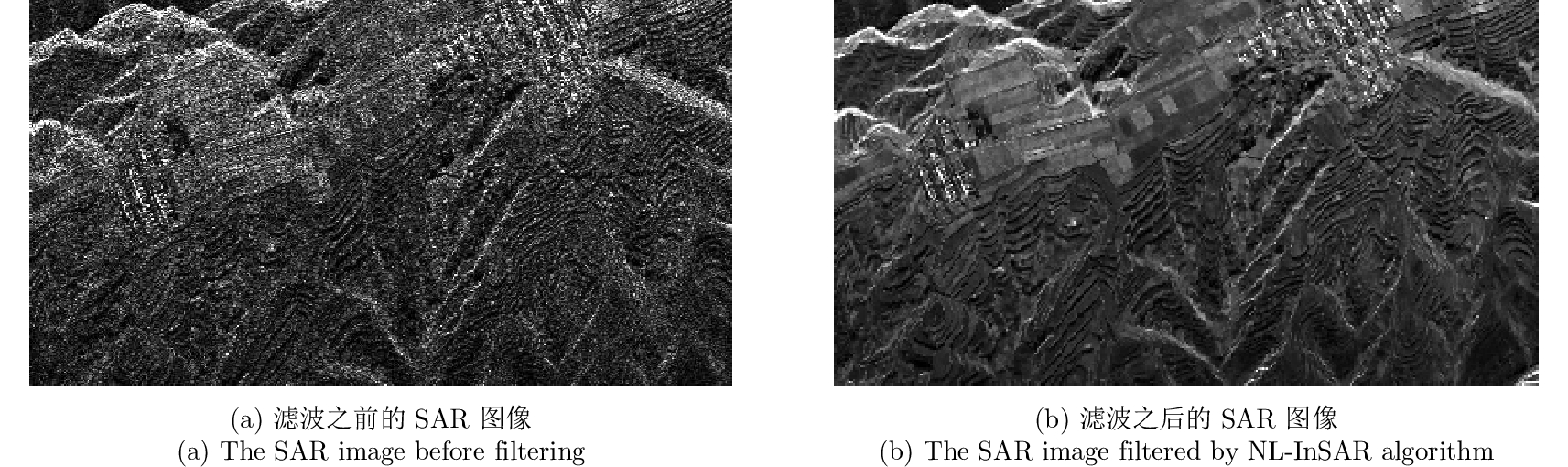
图 5 NL-InSAR滤波前后的SAR图像对比
Figure 5. Contrast between SAR image before filtering and filtered SAR image
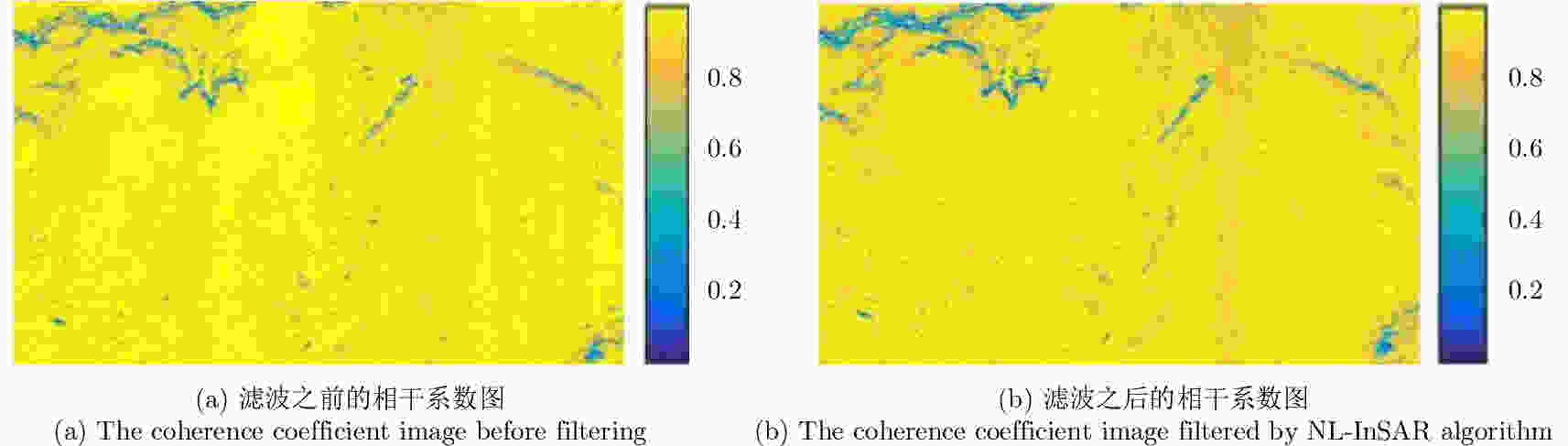
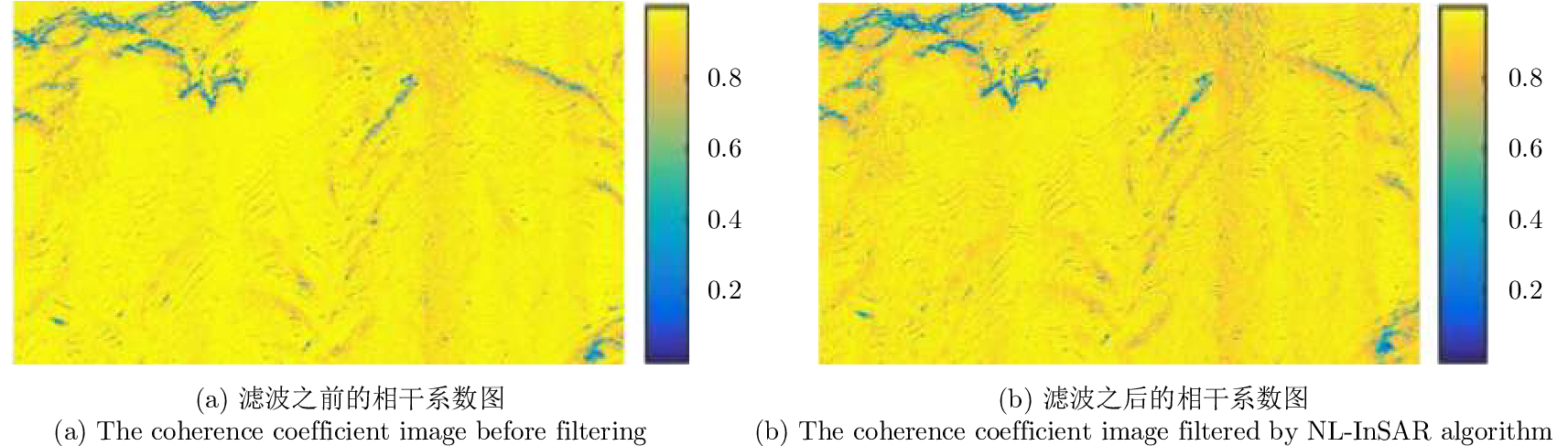
图 6 NL-InSAR滤波前后的相干系数
Figure 6. Contrast between coherence coefficient image before filtering and filtered coherence coefficient image
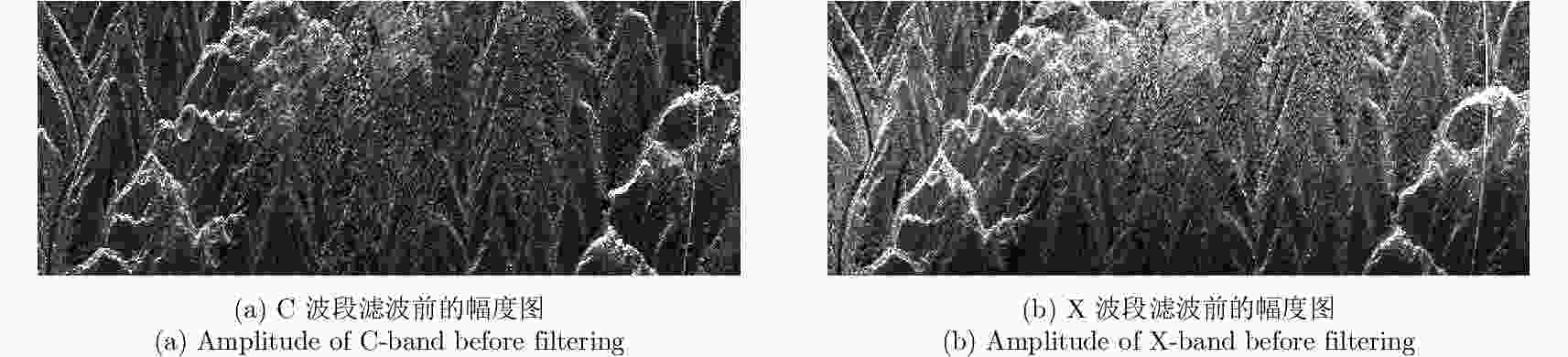
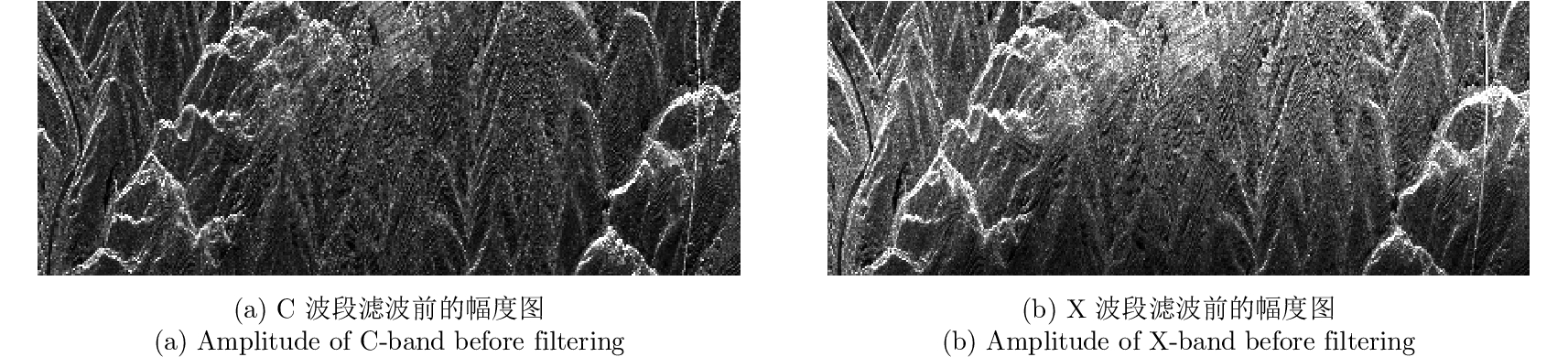
图 7 NL-InSAR滤波前的不同波段幅度图对比
Figure 7. Comparison of different band amplitude graphs before NL-InSAR filtering
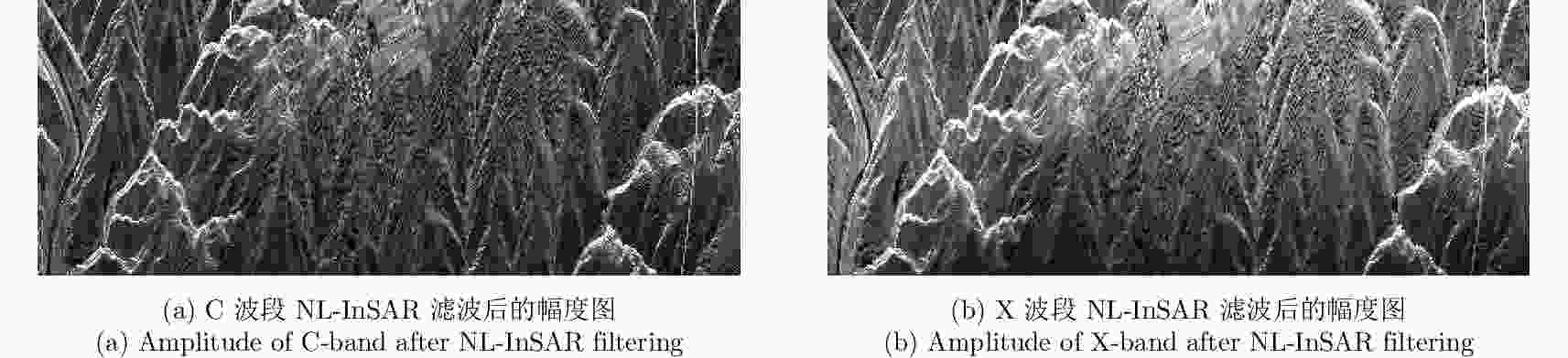
图 8 NL-InSAR滤波后的不同波段幅度图对比
Figure 8. Comparison of different band amplitude graphs after NL-InSAR filtering
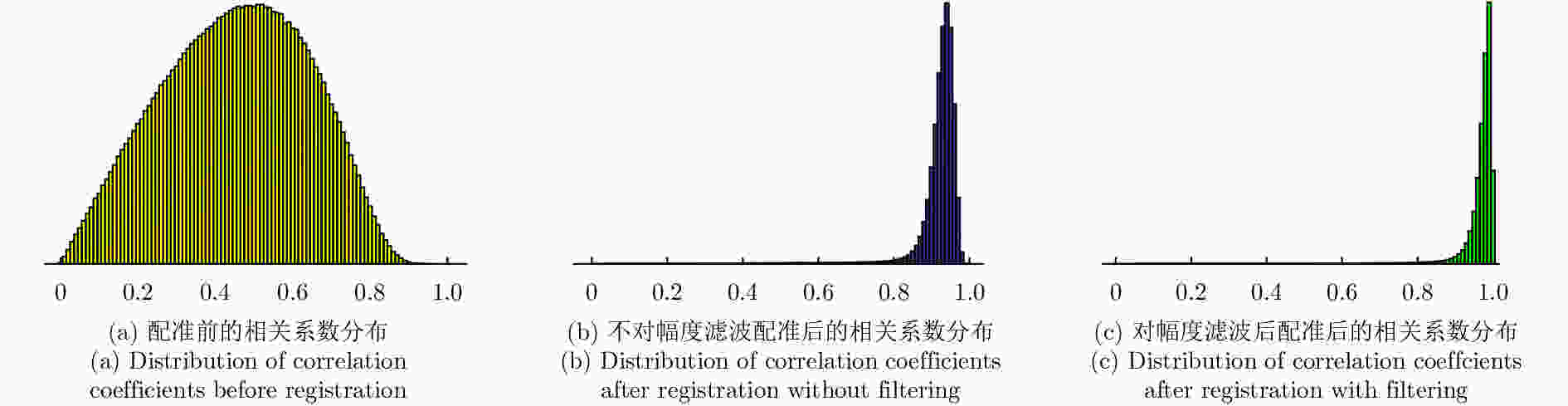
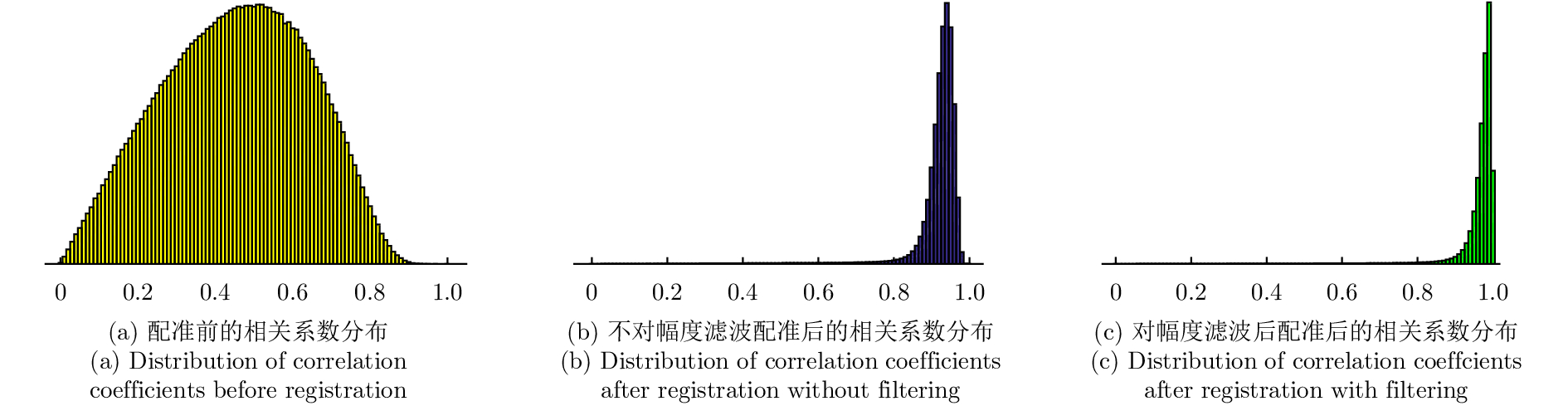
图 9 NL-InSAR滤波前后的不同波段配准后的相关系数分布直方图对比
Figure 9. Comparison of the distribution histogram of correlation coefficients of different bands before and after NL-InSAR filtering
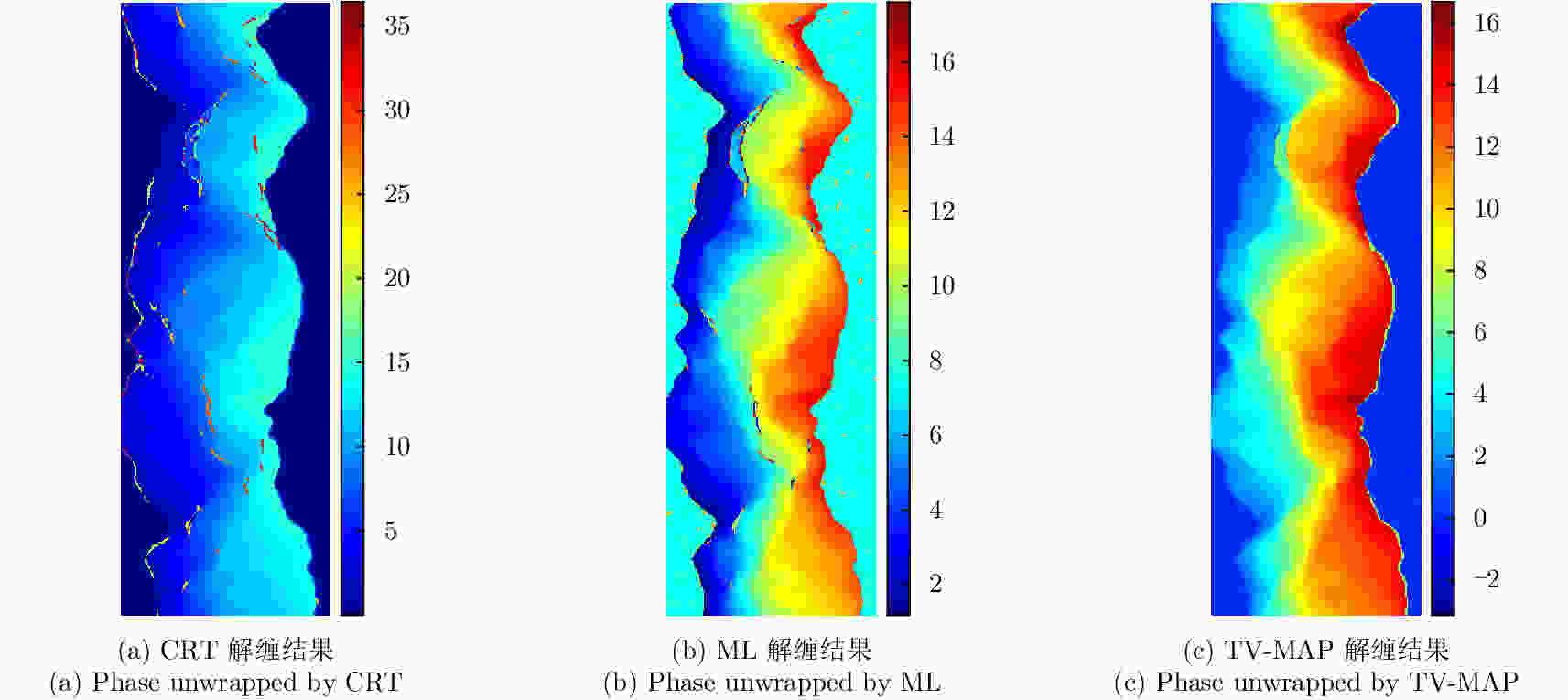
图 10 对相同的仿真数据3种联合解缠算法的结果对比
Figure 10. The unwrapped phase images unwrapped by diffenent algorithms
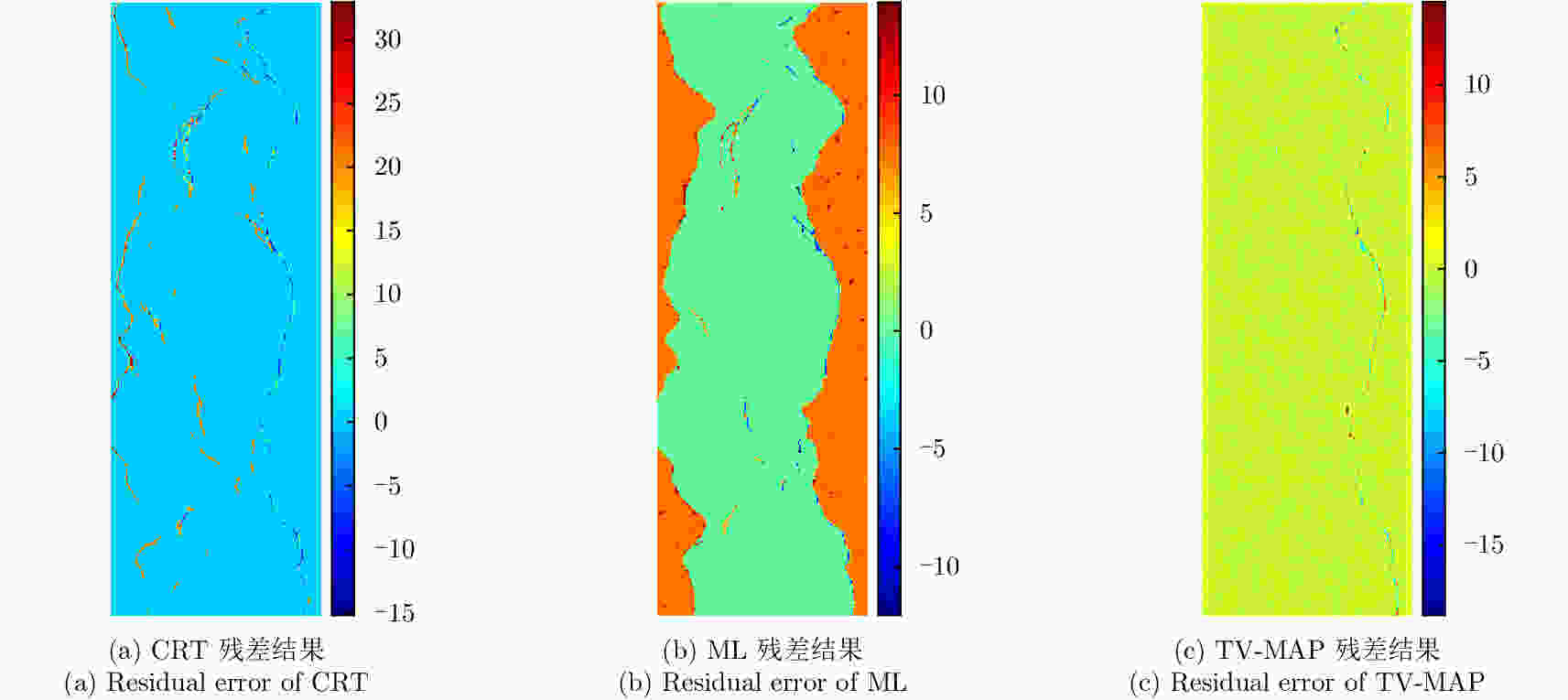
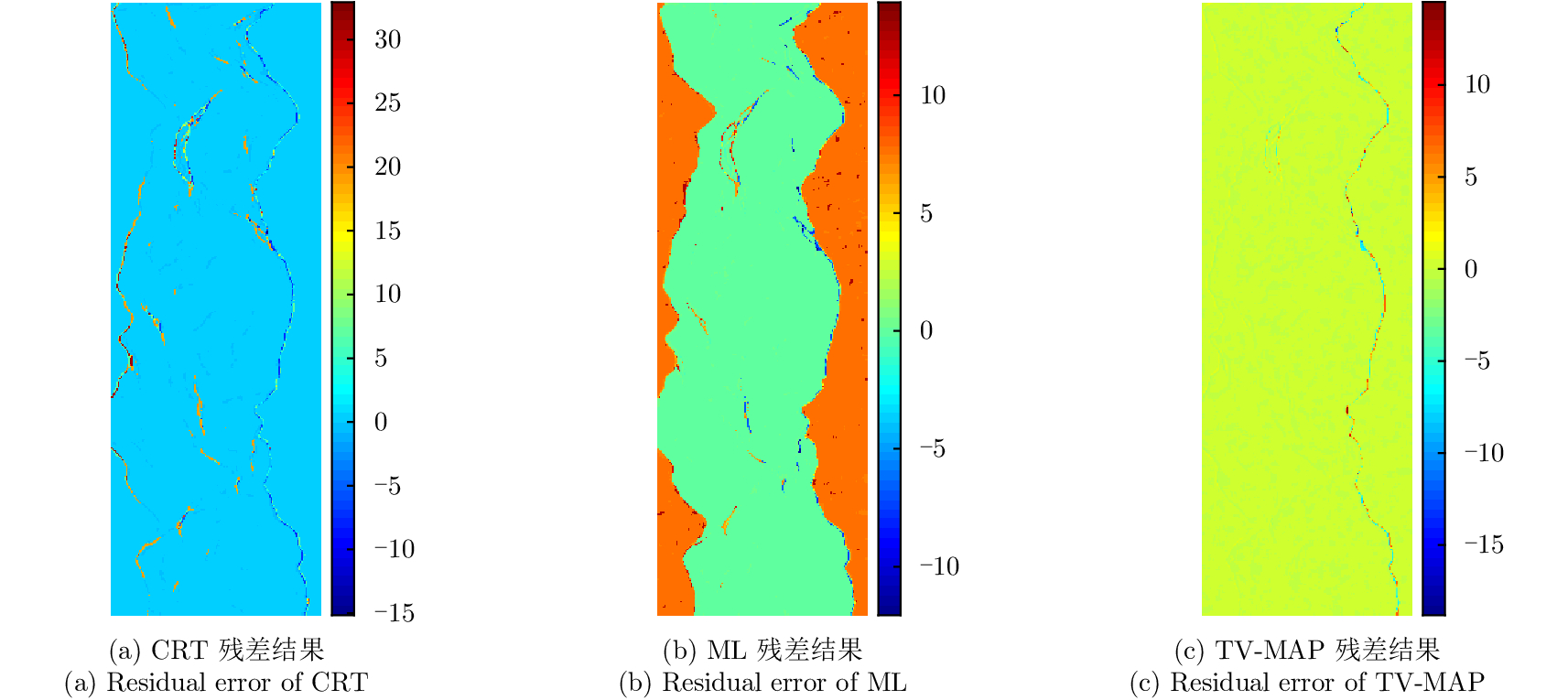
图 11 3种联合解缠算法解缠结果和原始相位的残差结果对比
Figure 11. The residual error images of different algorithms

图 14 聚类均值滤波和传统均值滤波结果对比
Figure 14. Contrast between clustering Mean filter resultand traditional mean filter result
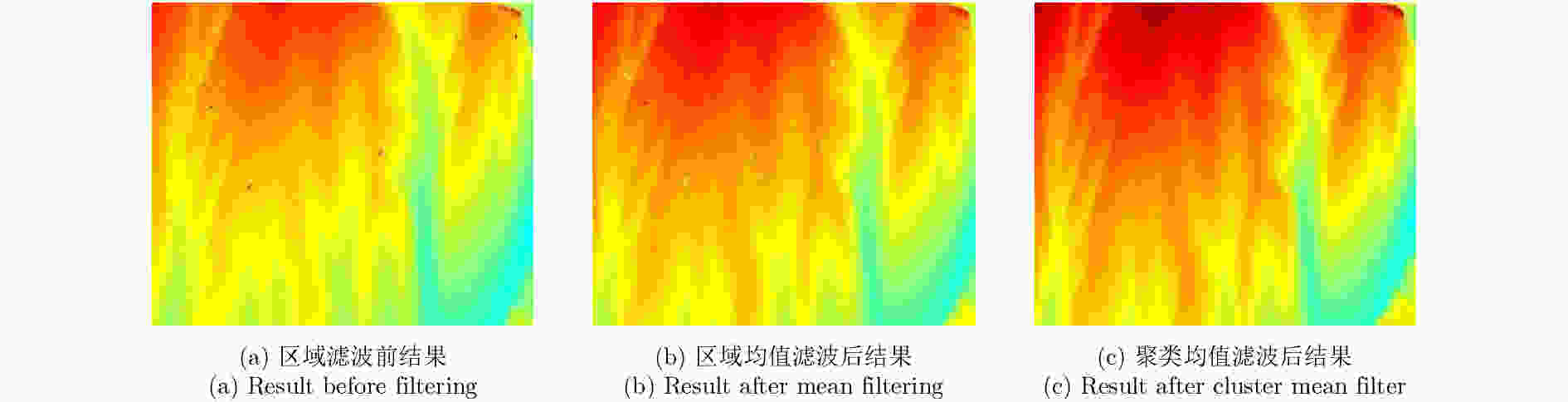
图 15 A区域聚类均值滤波和传统均值滤波结果对比
Figure 15. Contrast between clustering mean filter result and traditional mean filter result in area A
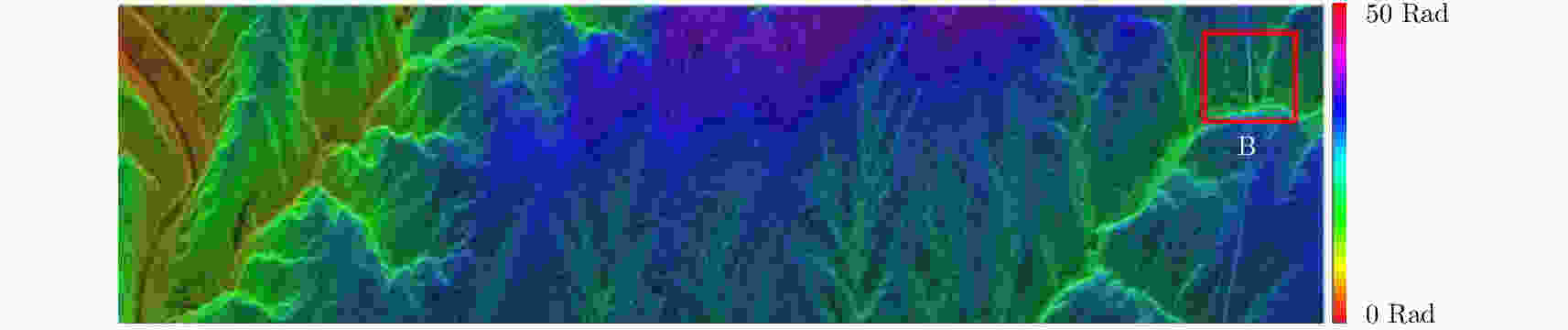
图 18 单通道使用最小代价流解缠(MCF)结果
Figure 18. The single-channel phase unwrapped by MCF algorithm
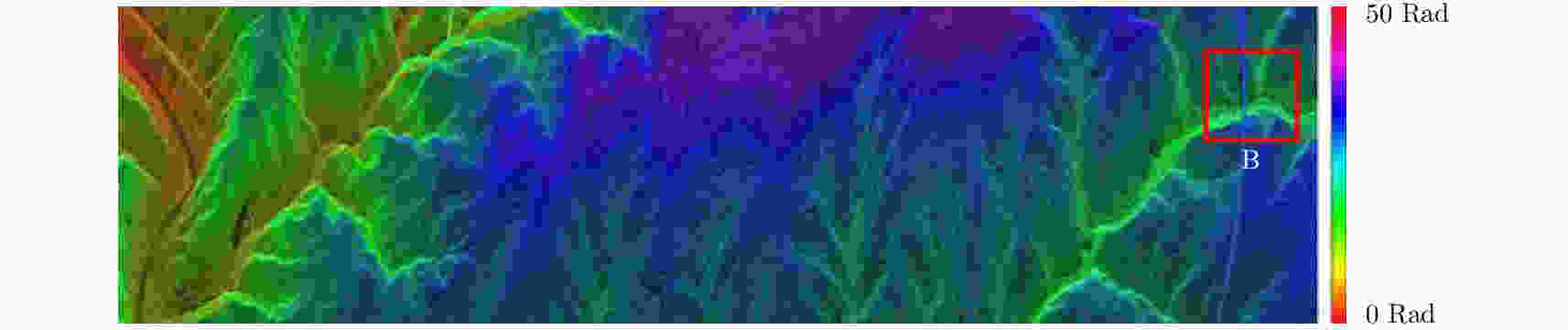
图 20 聚类均值滤波后的TV-MAP联合解缠结果
Figure 20. The dual-frequency phase unwrapped by TV-MAP and cluster mean filter
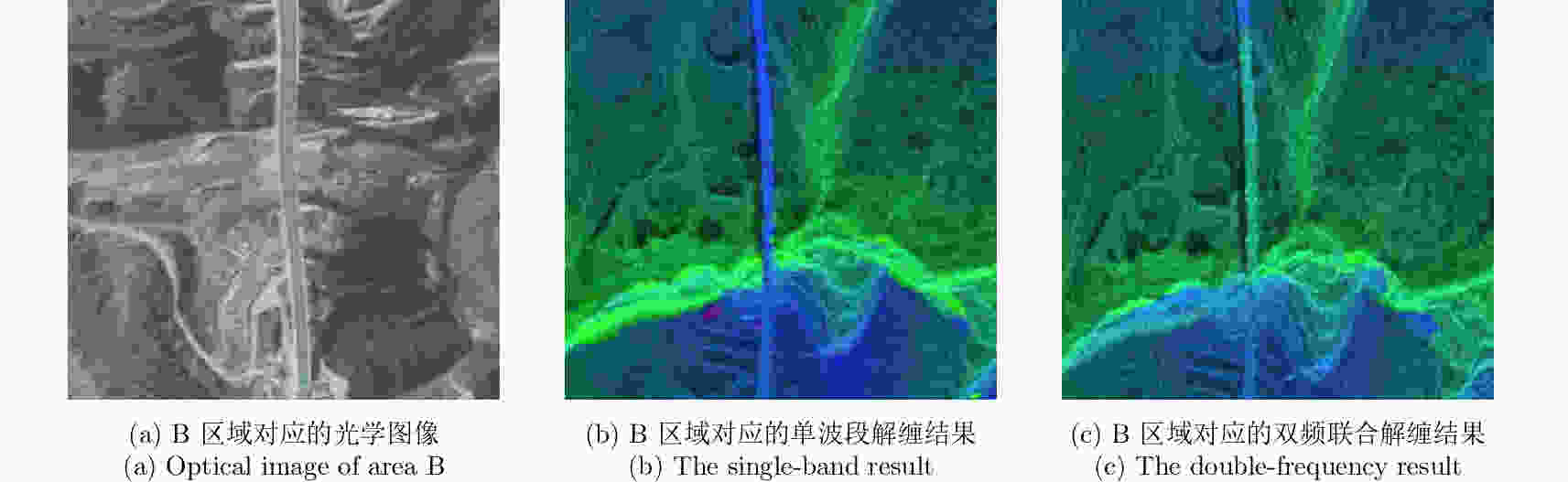
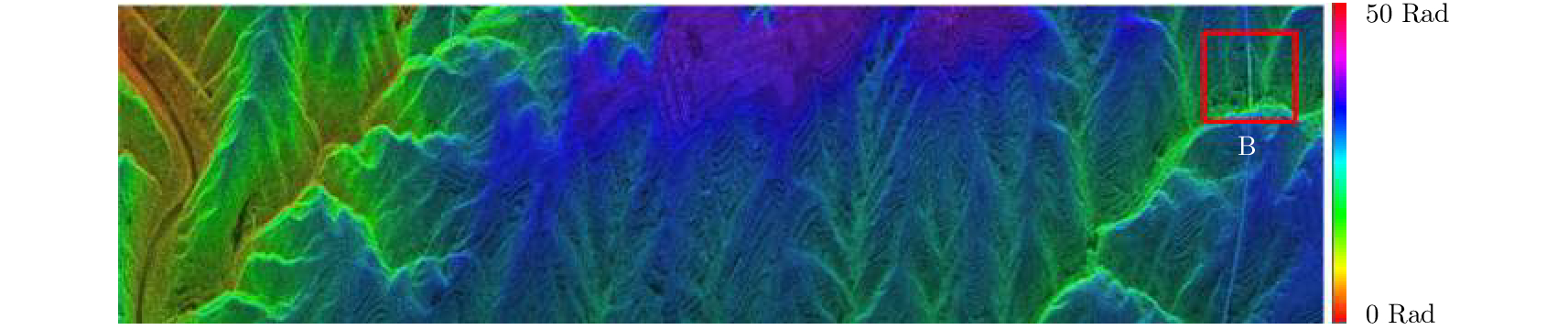
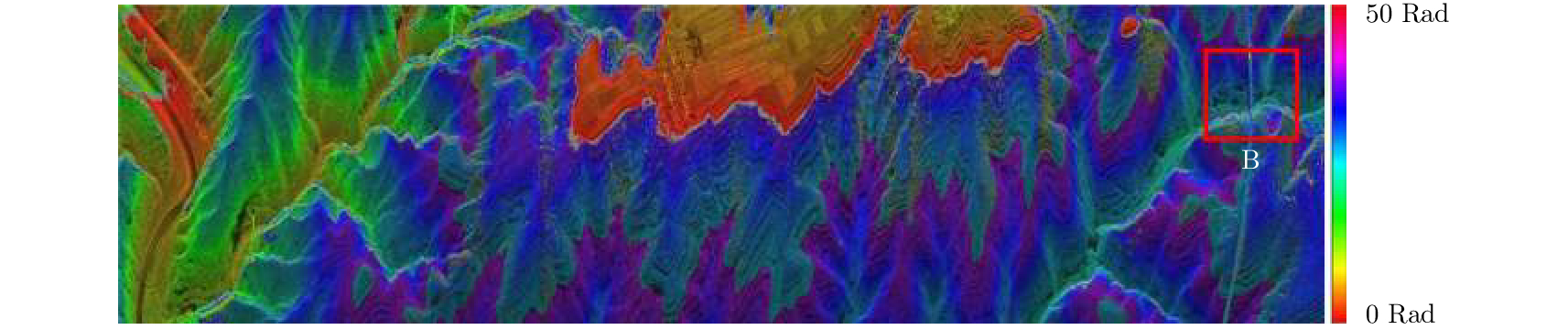
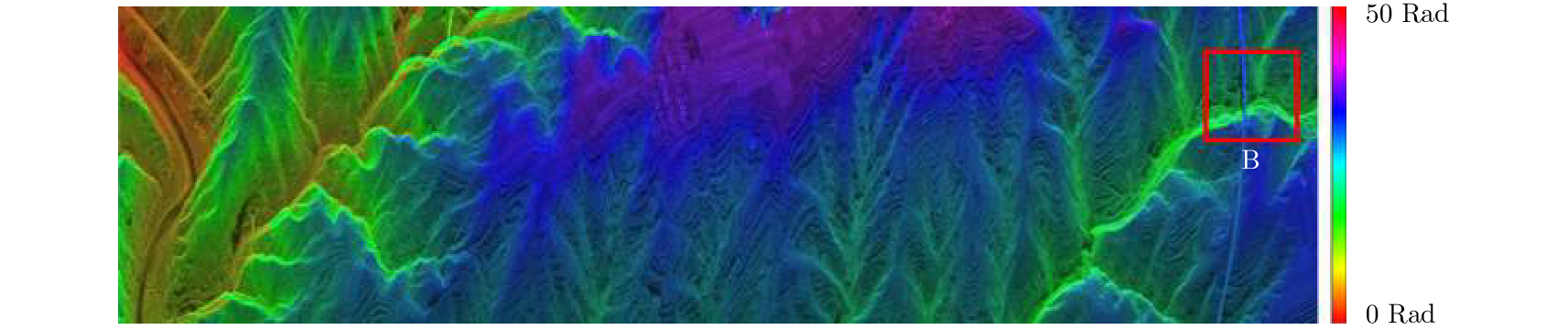
图 21 地形起伏比较大高架区域单波段和双频联合解缠结果对比
Figure 21. Contrast between single-band unwrapped phase and dual-frequency combined uwrapped phase
-
[1] Rogers A E E and Ingalls R P. Venus: Mapping the surface reflectivity by radar interferometry[J]. Science, 1969, 165(3895): 797–799. [2] Van Zyl J J. The Shuttle Radar Topography Mission (SRTM): A breakthrough in remote sensing of topography[J]. Acta Astronautica, 2001, 48(5/12): 559–565. [3] Griffiths H. Interferometric synthetic aperture radar[J]. Electronics&Communication Engineering Journal, 1995, 7(6): 247–265. [4] 王岩飞, 刘畅, 詹学丽, 等. 无人机载合成孔径雷达系统技术与应用[J]. 雷达学报, 2016, 5(4): 333–349. DOI: 10.12000/JR16089Wang Yanfei, Liu Chang, Zhan Xueli, et al. Technology and applications of UAV synthetic aperture radar system[J]. Journal of Radars, 2016, 5(4): 333–349. DOI: 10.12000/JR16089 [5] 侯丽英, 林赟, 洪文. 干涉圆迹SAR的目标三维重建方法研究[J]. 雷达学报, 2016, 5(5): 538–547. DOI: 10.12000/JR16009Hou Liying, Lin Yun, and Hong Wen. Three-dimensional reconstruction method study based on interferometric circular SAR[J]. Journal of Radars, 2016, 5(5): 538–547. DOI: 10.12000/JR16009 [6] Ghiglia D C and Pritt M D. Two-Dimensional Phase Unwrapping: Theory, Algorithms, and Software[M]. New York: Wiley, 1998 [7] Xu W, Chang E C, Kwoh L K, et al.. Phase-unwrapping of SAR interferogram with multi-frequency or multi-baseline[C]. Proceedings of 1994 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 1994, 2: 730–732 [8] Pascazio V and Schirinzi G. Estimation of terrain elevation by multifrequency interferometric wide band SAR data[J]. IEEE Signal Processing Letters, 2001, 8(1): 7–9. DOI: 10.1109/97.889635 [9] Hoge W S. A subspace identification extension to the phase correlation method[MRI application][J].IEEE Transactions on Medical Imaging, 2003, 22(2): 277–280. DOI: 10.1109/TMI.2002.808359 [10] Ferraiuolo G, Pascazio V, and Schirinzi G. Maximum a posteriori estimation of height profiles in InSAR imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 1(2): 66–70. DOI: 10.1109/LGRS.2003.822882 [11] Ferraioli G, Shabou A, Tupin F, et al. Multichannel phase unwrapping with graph cuts[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(3): 562–566. DOI: 10.1109/LGRS.2009.2021165 [12] Ferraiuolo G, Meglio F, Pascazio V, et al. DEM reconstruction accuracy in multichannel SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(1): 191–201. DOI: 10.1109/TGRS.2008.2002644 [13] Yu H W, Li Z F, and Bao Z. A cluster-analysis-based efficient multibaseline phase-unwrapping algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(1): 478–487. DOI: 10.1109/TGRS.2010.2055569 [14] Deledalle C A, Denis L, and Tupin F. NL-InSAR: Nonlocal interferogram estimation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(4): 1441–1452. DOI: 10.1109/TGRS.2010.2076376 [15] Yuan Z H, Deng Y K, Li F, et al. Multichannel InSAR DEM reconstruction through improved closed-form robust Chinese remainder theorem[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(6): 1314–1318. DOI: 10.1109/LGRS.2013.2238886 [16] Zeng T, Liu T D, Ding Z G, et al. Phase unwrapping method based on multi-frequency InSAR in highly sloped terrain[J]. Electronics Letters, 2016, 52(12): 1058–1059. DOI: 10.1049/el.2015.3795 [17] 斯奇, 王宇, 邓云凯, 等. 一种基于最大后验框架的聚类分析多基线干涉SAR高度重建算法[J]. 雷达学报, 2017, 6(6): 640–652. DOI: 10.12000/JR17043Si Qi, Wang Yu, Deng Yunkai, et al. A novel cluster-analysis algorithm based on MAP framework for multi-baseline InSAR height reconstruction[J]. Journal of Radars, 2017, 6(6): 640–652. DOI: 10.12000/JR17043 [18] 李杭, 梁兴东, 张福博, 等. 基于高斯混合聚类的阵列干涉SAR三维成像[J]. 雷达学报, 2017, 6(6): 630–639. DOI: 10.12000/JR17020Li Hang, Liang Xingdong, Zhang Fubo, et al. 3D imaging for array InSAR based on Gaussian mixture model clustering[J]. Journal of Radars, 2017, 6(6): 630–639. DOI: 10.12000/JR17020 [19] 赵耀, 邓云凯, 王宇, 等. 原始数据压缩对方位向多通道SAR系统影响研究[J]. 雷达学报, 2017, 6(4): 397–407. DOI: 10.12000/JR17030Zhao Yao, Deng Yunkai, Wang Yu, et al. Study of effect of raw data compression on azimuth multi-channel SAR system[J]. Journal of Radars, 2017, 6(4): 397–407. DOI: 10.12000/JR17030 [20] 尤红建, 胡岩峰. SAR和光学图像精配准技术的研究[J]. 雷达学报, 2014, 3(1): 78–84. DOI: 10.3724/SP.J.1300.2014.13154You Hong-jian and Hu Yan-feng. Investigation on fine registration for SAR and optical image[J]. Journal of Radars, 2014, 3(1): 78–84. DOI: 10.3724/SP.J.1300.2014.13154 [21] 刘钰菲. InSAR图像配准算法研究[D]. [硕士论文], 西安电子科技大学, 2011Liu Yu-fei. Research on image registration for InSAR system[D]. [Master dissertation], Xidian University, 2011 [22] 袁志辉. 多通道干涉SAR关键技术研究[D]. [博士论文], 中国科学院大学, 2013Yuan Zhi-hui. Study on the key techniques of multichannel interferometric synthetic aperture radar[D]. [Ph.D. dissertation], The University of Chinese Academy of Sciences, 2013 -

 下载:
下载:










计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

