
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Helicopter Rotor Parameter Estimation Method for Passive Radar
-
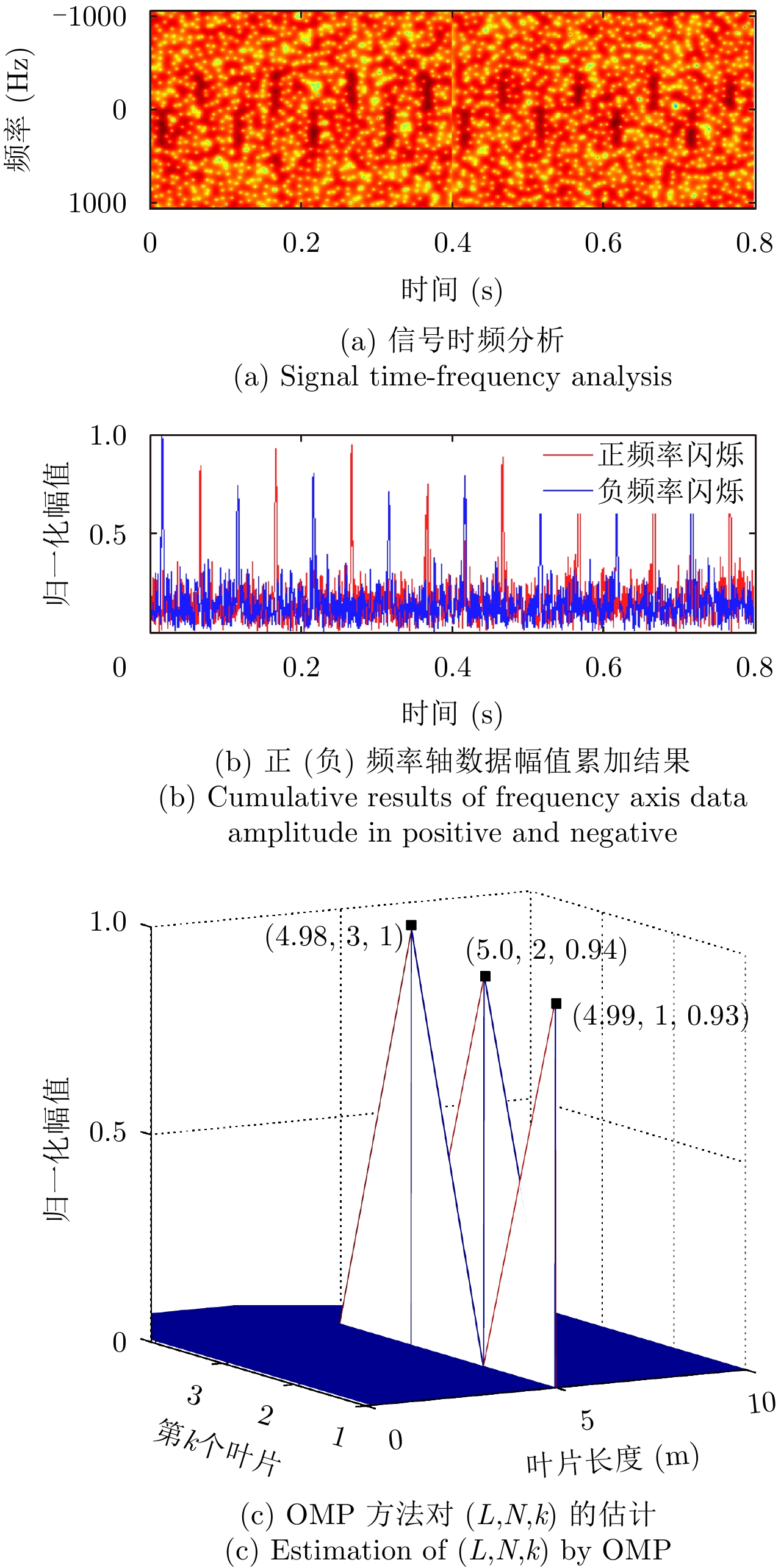
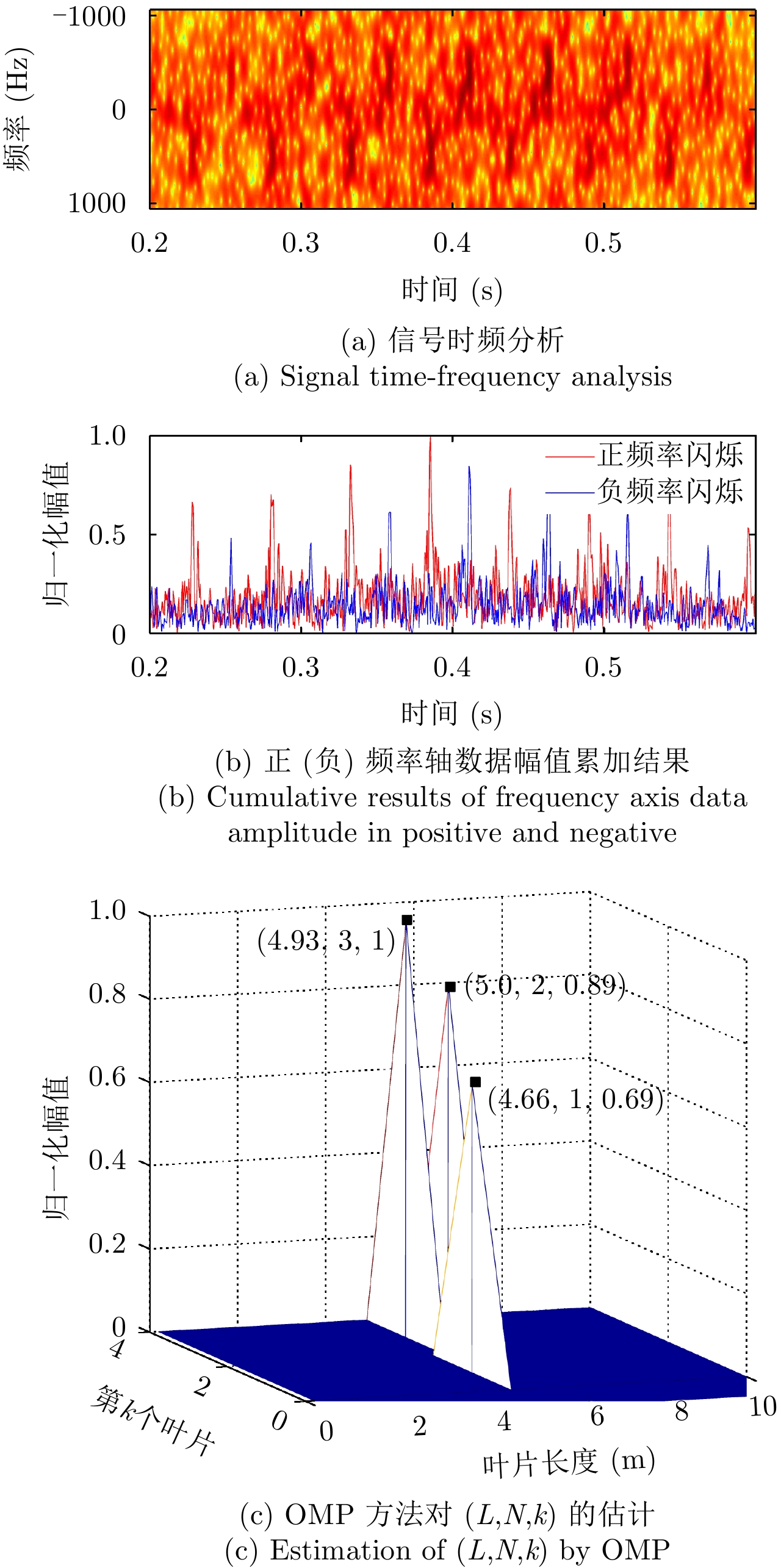
摘要: 外辐射源雷达是一种基于第三方非合作照射源的新体制雷达系统,在微多普勒效应目标分类和识别方面具有独特的优势,而其特点也决定了微多普勒效应参数估计方法需要具有良好的抗噪性能且计算量要小。针对上述问题,该文依据外辐射源雷达直升机旋翼微动信号模型,提出了利用时频域中回波闪烁特征进行直升机旋翼参数估计的新思路。通过对时频图中正负频率轴数据的幅值分别进行累加,提取出回波闪烁参数,同时,依据微动信号内在特性构建字典矩阵,利用正交匹配追踪算法实现了叶片长度、叶片数量、旋翼转速等参数的估计,相比常规Hough变换参数估计方法,该文方法更准确,更迅速。仿真和实测证明了该文方法的有效性。Abstract: The passive radar is a new radar system based on third-party non-cooperative radiation sources, which has unique advantages in micro-Doppler target classification and recognition. Its characteristics determine that the micro-Doppler effect parameter estimation method must have a good anti-noise performance and a small amount of calculation. In view of these considerations, this study presents a new idea of helicopter rotor parameter estimation using an echo flicker in the time-frequency domain based on the micro-motion signal model for the passive radar. The echo flicker parameters are extracted by accumulating the amplitudes of the positive and negative frequency axis data in the time-frequency diagram. The dictionary matrix is constructed based on the inherent characteristics of the micro-motion signals. The blade length, blade number, rotor speed, and other parameters are estimated using the orthogonal matching pursuit algorithm. Compared with the method based on the conventional Hough transform, the proposed method is more accurate and more rapid. The simulation and experimental results prove the feasibility of this method.
-
表 1 外辐射源雷达直升机旋翼回波模型仿真参数
Table 1. Simulation parameters of helicopter rotor echo model for passive radar
信号载频 叶片数 叶片长度 旋转速率 发射站方位角 接收站方位角 发射站仰角 接收站仰角 SNR 658 MHz 3 5 m 200 rpm 33° 76° 23° 23° –5 dB  下载: 导出CSV
下载: 导出CSV
-
[1] Chen V C, Wu Shun-jun, Du Lan, et al.. The Micro-Doppler Effect in Radar[M]. Beijing: Electronic Industry Press, 2013: 92–110. [2] Chen Xiao-long, Guan Jian, Zhao Zhi-jian, et al.. Micro-Doppler signatures of sea surface targets and applications to radar detection[C]. IEEE International Geoscience and Remote Sensing Symposium, Beijing, 2016: 2726–2729. DOI: 10.1109/IGARSS.2016.7729704. [3] Li Gang, Zhang Rui, Ritchie M, et al. Sparsity-driven micro-Doppler feature extraction for dynamic hand gesture recognition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(2): 655–665. DOI: 10.1109/TAES.2017.2761229 [4] Wan Xian-rong, Yi Jian-xian, Zhao Zhi-xin, et al. Experimental research for CMMB-based passive radar under a multipath environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 70–85. DOI: 10.1109/TAES.2013.120737 [5] Baczyk M K, SamczyńSki P, Kulpa K, et al. Micro-Doppler signatures of helicopters in multistatic passive radars[J]. IET Radar,Sonar&Navigation, 2015, 9(9): 1276–1283. DOI: 10.1049/iet-rsn.2015.0125 [6] 万显荣. 基于低频段数字广播电视信号的外辐射源雷达发展现状与趋势[J]. 雷达学报, 2012, 1(2): 109–123. DOI: 10.3724/SP.J.1300.2012.20027Wan Xian-rong. An overview on development of passive radar based on the low frequency band digital broadcasting and TV signal[J]. Journal of Radar, 2012, 1(2): 109–123. DOI: 10.3724/SP.J.1300.2012.20027 [7] Xia Peng, Wan Xian-rong, Yi Jian-xin, et al.. Investigations toward micro-Doppler effect in digital broadcasting based passive radar[C]. IET International Radar Conference, Hangzhou, 2015: 1–5. DOI: 10.1049/cp.2015.1191. [8] 夏鹏, 万显荣, 易建新. 外辐射源雷达目标旋转部件微动参数估计[J]. 电波科学学报, 2016, 31(4): 676–682. DOI: 10.13443/j.cjors.2015082101Xia Peng, Wan Xian-rong, and Yi Jian-xin. Micromotion parameters estimation for rotating structures on target in passive radar[J]. Chinese Journal of Radio Science, 2016, 31(4): 676–682. DOI: 10.13443/j.cjors.2015082101 [9] Zhang Qun, Guan Hua, Guo Ying, et al.. Separation of micro-Doppler signal using an extended Hough transform[C]. Proceedings of 2006 International Conference on Communications, Circuits and Systems, Guilin, 2006: 361–365. DOI: 10.1109/ICCCAS.2006.284654. [10] Liu Jin, Ai Xiao-feng, Zhao Feng, et al.. Motion estimation of micro-motion targets with translational motion[C]. IET International Radar Conference, Hangzhou, 2015: 1–5. DOI: 10.1049/cp.2015.1435. [11] Melino R, Kodituwakku S, and Tran H T. Orthogonal matching pursuit and matched filter techniques for the imaging of rotating blades[C]. 2015 IEEE Radar Conference, Johannesburg, 2015: 1–6. DOI: 10.1109/RadarConf.2015.7411844. [12] Tran H T, Heading E, and Melino R. OMP-based translational motion estimation for a rotating target by narrowband radar[J]. IET Radar,Sonar&Navigation, 2017, 11(5): 854–860. DOI: 10.1049/iet-rsn.2016.0583 [13] Zhang Wen-peng, Li Kang-le, and Jiang Wei-dong. Parameter estimation of radar targets with macro-motion and micro-motion based on circular correlation coefficients[J]. IEEE Signal Processing Letters, 2015, 22(5): 633–637. DOI: 10.1109/LSP.2014.2365547 [14] 邓冬虎, 张群, 罗迎, 等. 基于高阶矩函数的雷达目标微动参数估计方法[J]. 电子学报, 2013, 41(12): 2339–2345. DOI: 10.3969/j.issn.0372-2112.2013.12.004Deng Dong-hu, Zhang Qun, Luo Ying, et al. Micro-motion parameter estimation of radar target based on high-order moment function[J]. Acta Electronica Sinica, 2013, 41(12): 2339–2345. DOI: 10.3969/j.issn.0372-2112.2013.12.004 [15] 陈永彬, 李少东, 杨军, 等. 旋翼叶片回波建模与闪烁现象机理分析[J]. 物理学报, 2016, 65(13): 138401. DOI: 10.7498/aps.65.138401Chen Yong-bin, Li Shao-dong, Yang Jun, et al. Rotor blades echo modeling and mechanism analysis of flashes phenomena[J]. Acta Physica Sinica, 2016, 65(13): 138401. DOI: 10.7498/aps.65.138401 [16] 张群, 罗迎. 雷达目标微多普勒效应[M]. 北京: 国防工业出版社, 2013: 113–187.Zhang Qun and Luo Ying. Micro-Doppler Effect of Radar Target[M]. Beijing: National Defense Industry Press, 2013: 113–187. -

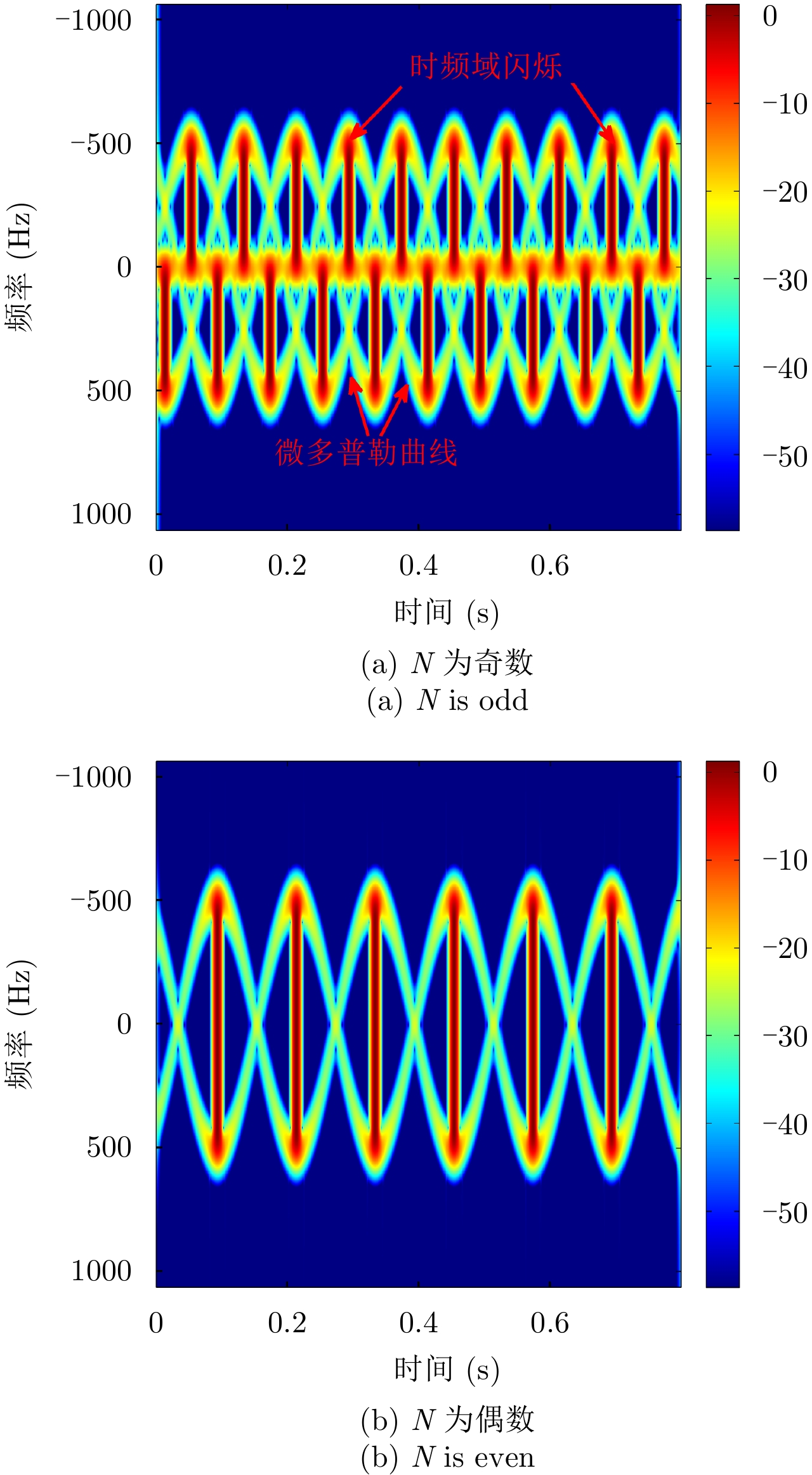

图(6) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

