
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Terahertz Information Metamaterials and Metasurfaces
-
摘要: 该文对信息超材料,包括数字超材料、编码超材料、以及可编程超材料的研究进展及其在太赫兹领域的应用进行了综述,从原理分析、数值仿真、样品制备、实际应用等多个角度介绍了信息超材料对电磁波全面而灵活的调控能力,着重探讨了编码超材料在太赫兹领域的发展以及应用,最后阐述了现场可编程超材料的原理及其在构建新型成像系统、新概念雷达中的应用。信息超材料与超表面对太赫兹波束的灵活调控可用于制作波束分离、低雷达散射截面等多种功能器件,为太赫兹频段电磁波的实时调控开辟了新的途径。Abstract: In this paper, we review the recent developments on information metamaterials, including digital metamaterials, coding metamaterials, and programmable metamaterials; furthermore, we discuss their applications in the terahertz (THz)-frequency region. In addition their flexibility to manipulate the electromagnetic waves, the physical principle, numerical simulation, fabrication, and application of information metamaterial are discussed in detail. Moreover, we developed and applied a coding metasurface that works in the THz band. Furthermore, the principle of real-time programmable metamaterials and their application in novel imaging systems and radar systems are illustrated. Information metamaterials and metasurfaces can be used for various functional devices such as beam splitting and low radar cross section, which open up a novel route to manipulate THz radiations.
-
Key words:
- Terahertz /
- Information metamaterials /
- Coding metasurface /
- Digital and programmable /
- Radar
-



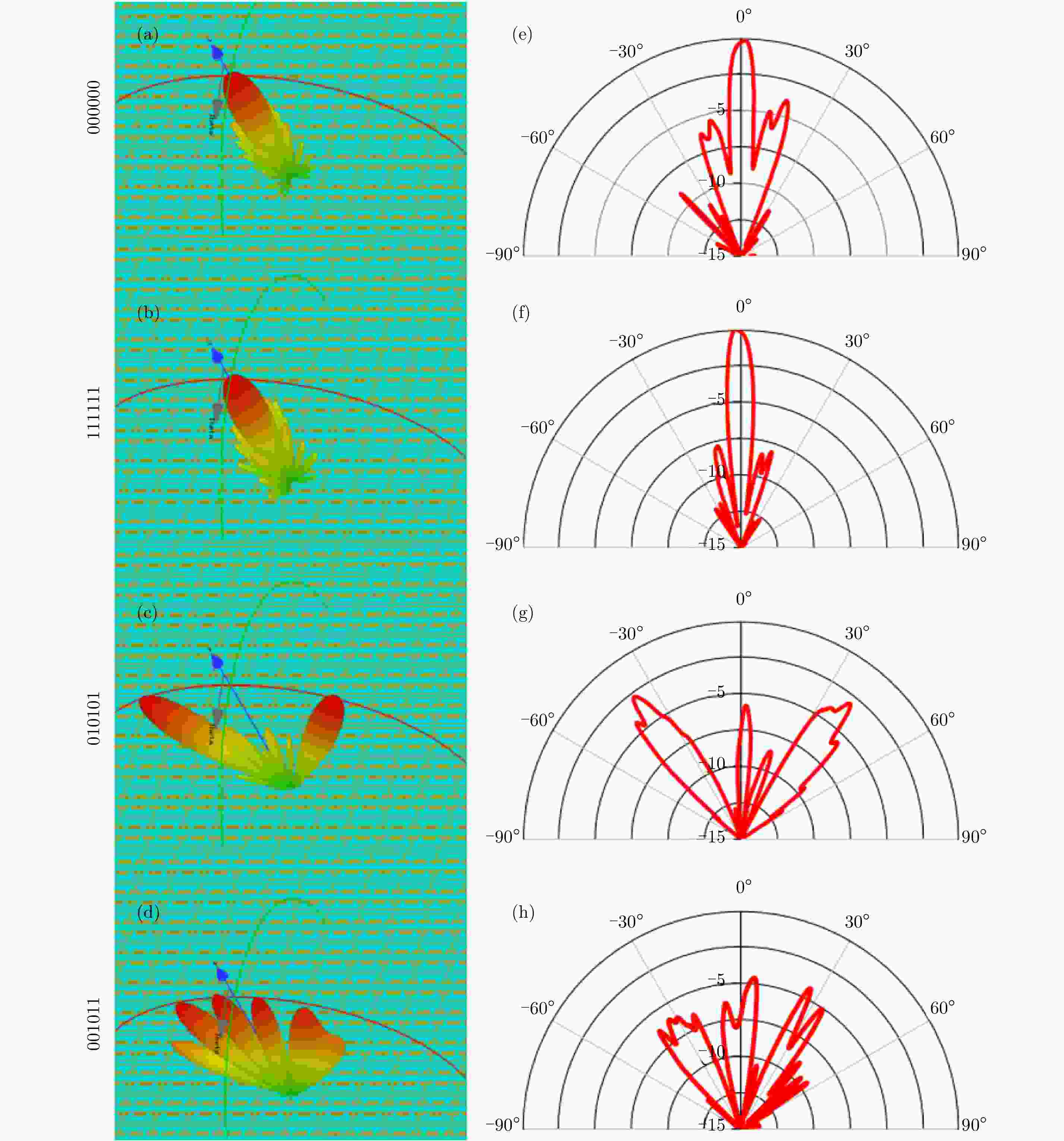
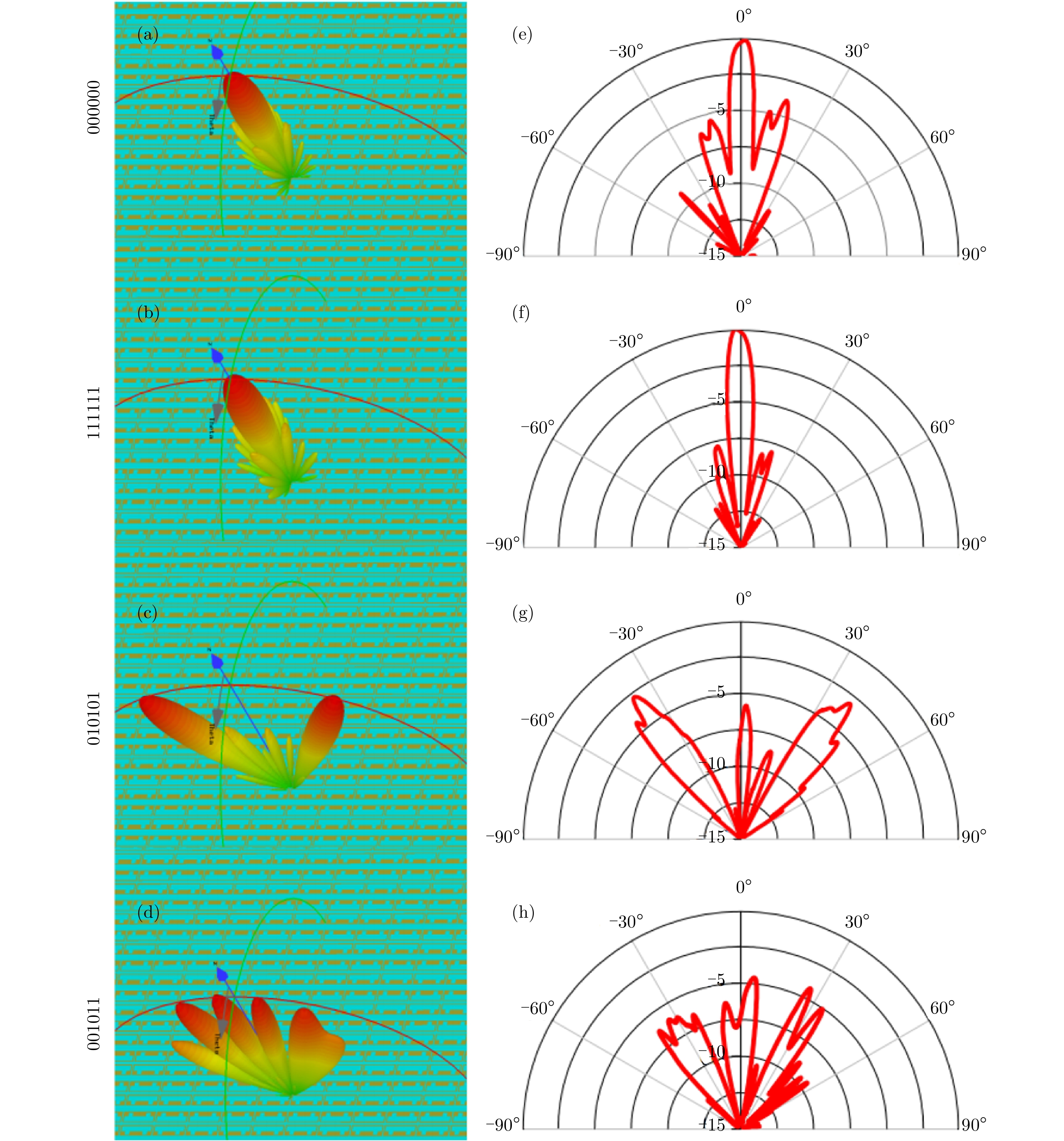
图 11 (a)–(d)现场可编程超表面在不同编码序列下的散射场仿真结果,其中(a)对应的编码序列为“000000”,(b)对应的编码序列为“111111”,(c)对应的编码序列为“010101”,(d)对应的编码序列为“001011”,(e)–(h)为与之对应的测试结果[11]
Figure 11. Numerical simulation results of scattering patterns for digital metasurface under different coding sequences: (a) 000000, (b) 111111, (c) 010101 and (d) 001011. (e)–(h) Experimental results of scattering patterns for the digital metasurface under different coding sequences: (e) 000000, (f) 111111, (g) 010101 and (h) 001011[11]
-
[1] Smith D R, Schultz S, Markoš P, et al. Determination of effective permittivity and permeability of metamaterials from reflection and transmission coefficients[J]. Physical Review B, 2002, 65(19): 195104. DOI: 10.1103/PhysRevB.65.195104 [2] Yu N F, Genevet P, Kats M A, et al. Light propagation with phase discontinuities: Generalized laws of reflection and refraction[J]. Science, 2011, 334(6054): 333–337. DOI: 10.1126/science.1210713 [3] Pfeiffer C and Grbic A. Metamaterial Huygens’ surfaces: Tailoring wave fronts with reflectionless sheets[J]. Physical Review Letters, 2013, 110(19): 197401. DOI: 10.1103/PhysRevLett.110.197401 [4] Valentine J, Zhang S, Zentgraf T, et al. Three-dimensional optical metamaterial with a negative refractive index[J]. Nature, 2008, 455(7211): 376–379. DOI: 10.1038/nature07247 [5] Shen X P, Cui T J, Martin-Cano D, et al. Conformal surface plasmons propagating on ultrathin and flexible films[J]. Proceedings of the National Academy of Sciences of the United States of America, 2013, 110(1): 40–45. DOI: 10.1073/pnas.1210417110 [6] Ma H F, Shen X P, Cheng Q, et al. Broadband and high-efficiency conversion from guided waves to spoof surface plasmon polaritons[J]. Laser&Photonics Reviews, 2014, 8(1): 146–151. [7] Zhang H C, Zhang Q, Liu J F, et al. Smaller-loss planar SPP transmission line than conventional microstrip in microwave frequencies[J]. Scientific Reports, 2016, 6: 23396. DOI: 10.1038/srep23396 [8] Huang L L, Chen X Z, Mühlenbernd H, et al. Three-dimensional optical holography using a plasmonic metasurface[J]. Nature Communications, 2013, 4: 2808. [9] Lin J, Mueller J B, Wang Q, et al. Polarization-controlled tunable directional coupling of surface plasmon polaritons[J]. Science, 2013, 340(6130): 331–334. DOI: 10.1126/science.1233746 [10] Sun S L, He Q, Xiao S Y, et al. Gradient-index meta-surfaces as a bridge linking propagating waves and surface waves[J]. Nature Materials, 2012, 11(5): 426–431. DOI: 10.1038/nmat3292 [11] Cui T J, Qi M Q, Wan X, et al. Coding metamaterials, digital metamaterials and programmable metamaterials[J]. Light:Science&Applications, 2014, 3(10): e218. [12] Liu S, Cui T J, Xu Q, et al. Anisotropic coding metamaterials and their powerful manipulation of differently polarized terahertz waves[J]. Light:Science&Applications, 2016, 5(5): e16076. [13] Liu S, Zhang H C, Zhang L, et al. Full-state controls of terahertz waves using tensor coding metasurfaces[J]. ACS Applied Materials&Interfaces, 2017, 9(25): 21503–21514. [14] Wu H T, Liu S, Wan X, et al. Controlling energy radiations of electromagnetic waves via frequency coding metamaterials[J]. Advanced Science, 2017, 4(9): 1700098. DOI: 10.1002/advs.201700098 [15] Liu S, Cui T J, Zhang L, et al. Convolution operations on coding metasurface to reach flexible and continuous controls of terahertz beams[J]. Advanced Science, 2016, 3(10): 1600156. DOI: 10.1002/advs.201600156 [16] Gao L H, Cheng Q, Yang J, et al. Broadband diffusion of terahertz waves by multi-bit coding metasurfaces[J]. Light:Science&Applications, 2015, 4(9): e324. [17] Hashemi M R M, Yang S H, Wang T Y, et al. Electronically-controlled beam-steering through vanadium dioxide metasurfaces[J]. Scientific Reports, 2016, 6: 35439. DOI: 10.1038/srep35439 [18] Scherger B, Reuter M, Scheller M, et al. Discrete terahertz beam steering with an electrically controlled liquid crystal device[J]. Journal of Infrared,Millimeter,and Terahertz Waves, 2012, 33(11): 1117–1122. DOI: 10.1007/s10762-012-9927-5 [19] Smith B C, Whitaker J F, and Rand S C. Steerable THz pulses from thin emitters via optical pulse-front tilt[J]. Optics Express, 2016, 24(18): 20755–20762. DOI: 10.1364/OE.24.020755 [20] Monnai Y, Altmann K, Jansen C, et al. Terahertz beam steering and variable focusing using programmable diffraction gratings[J]. Optics Express, 2013, 21(2): 2347–2354. DOI: 10.1364/OE.21.002347 [21] Shrekenhamer D, Montoya J, Krishna S, et al. Four-color metamaterial absorber THz spatial light modulator[J]. Advanced Optical Materials, 2013, 1(12): 905–909. DOI: 10.1002/adom.v1.12 [22] Chen H T, Padilla W J, Zide J M, et al. Active terahertz metamaterial devices[J].Nature, 2006, 444(7119): 597–600. DOI: 10.1038/nature05343 [23] Li L L, Cui T J, Ji W, et al. Electromagnetic reprogrammable coding-metasurface holograms[J]. Nature Communications, 2017, 8: 197. DOI: 10.1038/s41467-017-00164-9 [24] Wan X, Qi M Q, Chen T Y, et al. Field-programmable beam reconfiguring based on digitally-controlled coding metasurface[J]. Scientific Reports, 2016, 6: 20663. DOI: 10.1038/srep20663 -

 下载:
下载:






图(11)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

