
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Signal Reconstruction Approach for Multichannel SAR in Azimuth Based on Multiframe Super resolution
-
摘要: 方位向多通道技术是星载合成孔径雷达(Synthetic Aperture Radar, SAR)同时实现高分辨率宽测绘带成像的有效手段,对于方位向多通道星载SAR系统,当脉冲重复频率(Pulse Repetition Frequency, PRF)不满足均匀采样条件时方位向信号被非均匀采样,成像前需进行均匀化重建。该文创新性地提出以数字图像处理(Digital Image Processing, DIP)领域多帧超分辨率的思路解决方位向多通道星载SAR非均匀采样信号重建问题,并总结给出了多帧超分辨处理的一般方法。仿真与实测数据实验验证了方法的有效性,且在复杂度性能上具有一定优势。该文第1次建立了方位向多通道星载SAR非均匀采样信号重建与多帧超分辨率问题的联系,为这一信号重建问题的解决提供一种新的思路。Abstract: To achieve high-resolution wide-swath imaging, the use of multichannel techniques in azimuth is effective for spaceborne Synthetic Aperture Radar (SAR). For azimuth multichannel systems, the signal in azimuth is nonuniformly sampled if the uniform sampling condition related to Pulse Repetition Frequency (PRF) is not satisfied, which makes it important to reconstruct the azimuth signal prior to image formation. In this study, to solve the azimuth signal reconstruction problem in multichannel SAR, we propose the innovative use of a multiframe super-resolution method in Digital Image Processing (DIP) and summarize the general multiframe super-resolution process. Our simulation results and real data experiments verify the effectiveness of the proposed method, which demonstrates some advantages in complexity performance. By establishing linkages between the problem of signal reconstruction of nonuniformly sampled signals and the multiframe super-resolution concept, we provide a new approach to this traditional signal reconstruction problem.
-

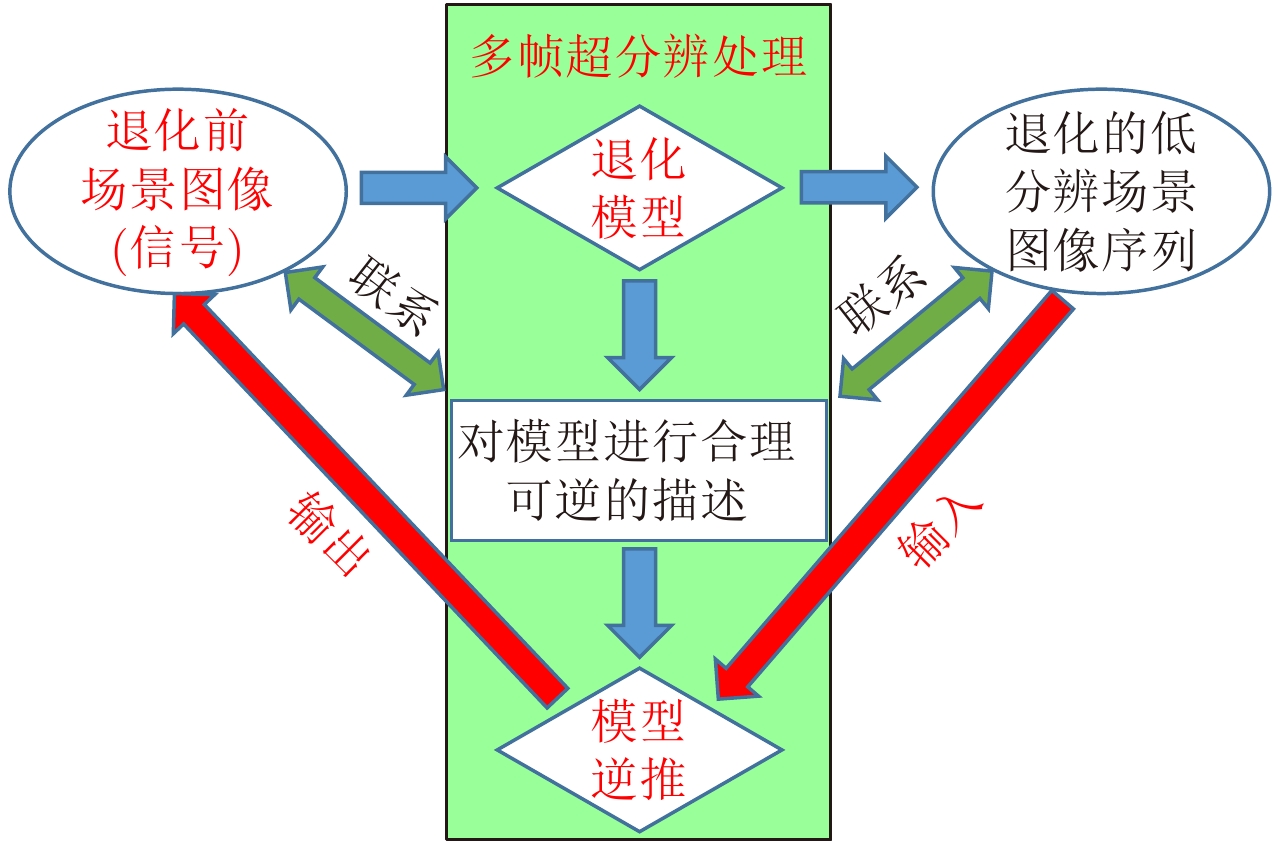
图 4 多帧超分辨率与多通道SAR信号重建对比
Figure 4. Comparison of multiframe super resolution and signal reconstruction of multichannel SAR system

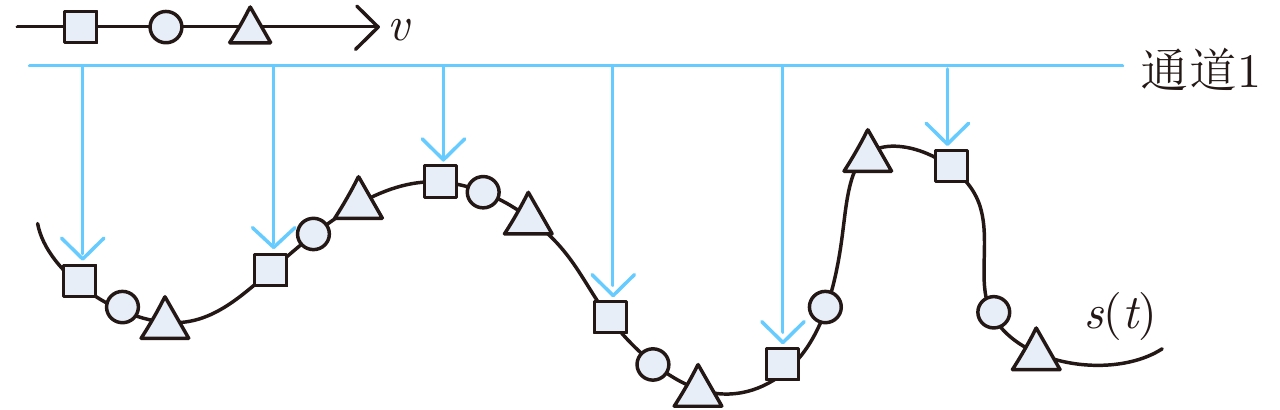
图 5 仅考虑几何变换的图像退化模型
Figure 5. Image degradation model with only geometric transformation considered

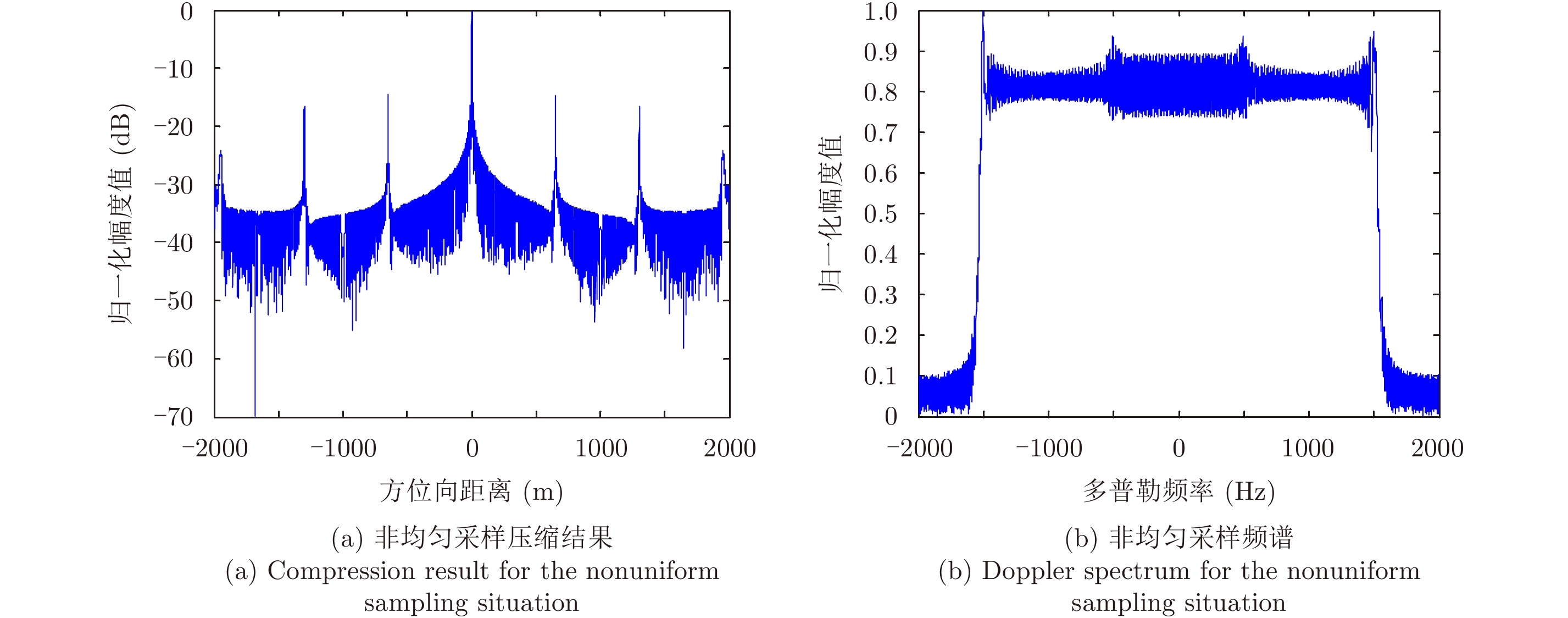
图 9 PRF不满足均匀采样条件时仿真结果
Figure 9. Simulation results for the nonuniform sampling situation

图 10 非均匀采样重建后仿真结果
Figure 10. Simulation results for the nonuniform sampling situation after reconstruction

图 11 方位向压缩结果局部放大
Figure 11. Partial enlarged drawing of the compression result in azimuth

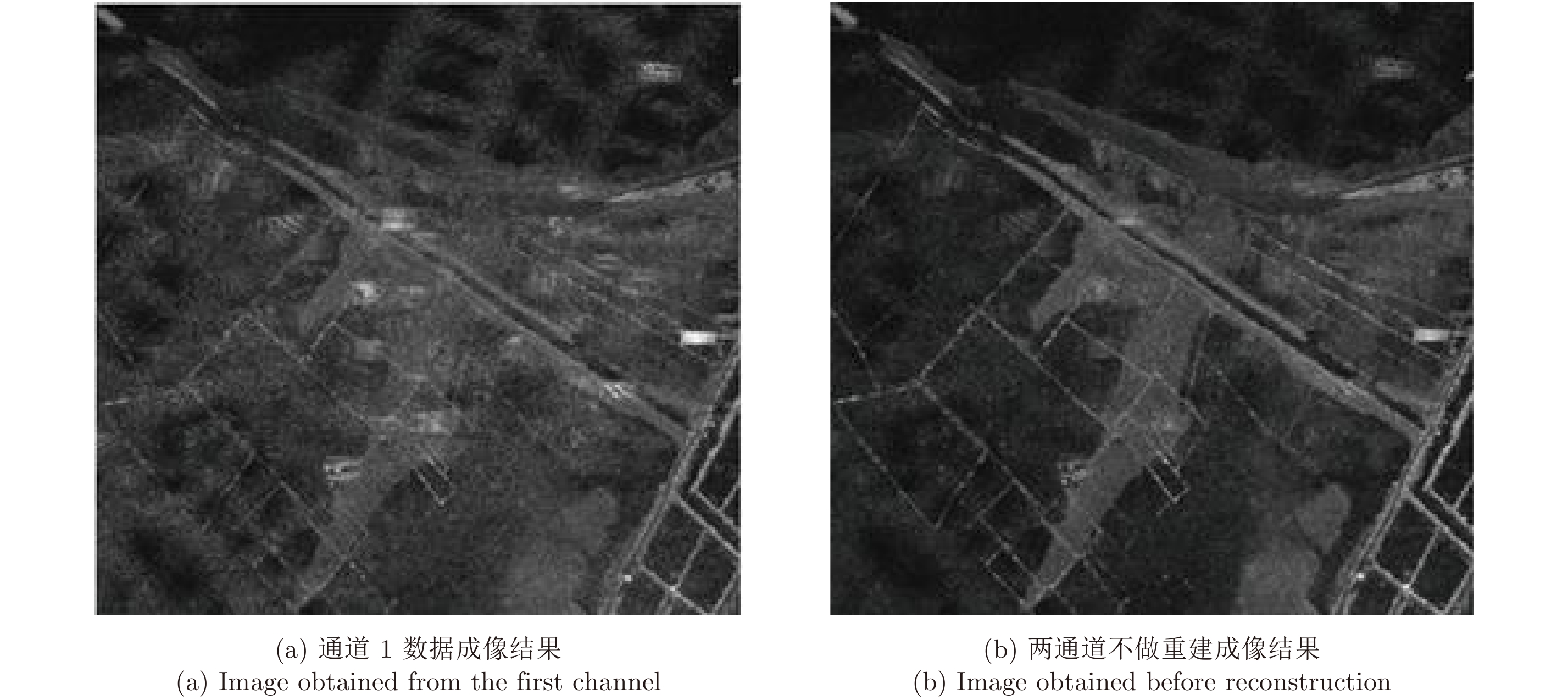
图 13 通道1及两通道不做重建成像结果
Figure 13. The images obtained from the first channel and the unreconstructed nonuniform data

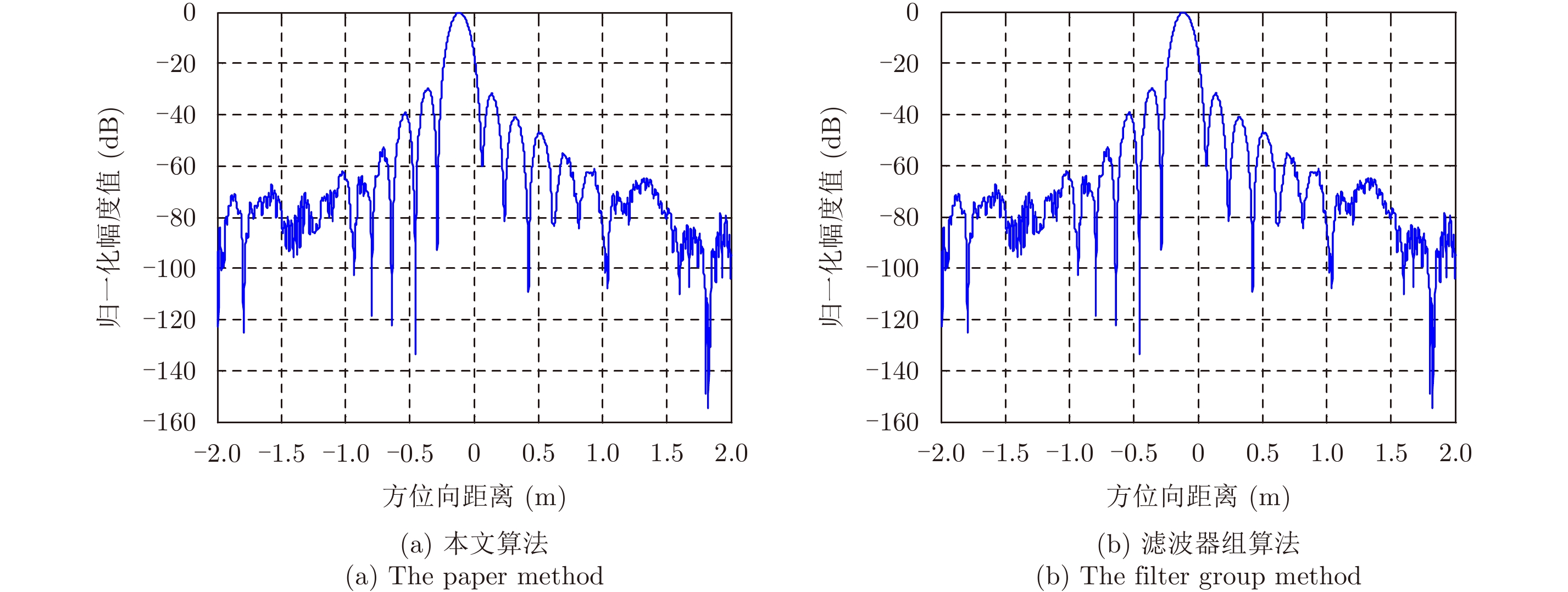
图 15 实测数据点目标方位向切片
Figure 15. Zoomed azimuth cut of the point target in the image with both methods
表 1 方位向多通道星载SAR系统参数
Table 1. The parameters for a spaceborne azimuth multichannel system
系统参数 数值 载波波长(m) 0.0311 方位向通道数 4 理想脉冲重复频率(Hz) 1247 载荷飞行速度(m/s) 7483 方位向子孔径间距(m) 3 多普勒带宽(Hz) 4000  下载: 导出CSV
下载: 导出CSV
-
[1] 邓云凯, 赵凤军, 王宇. 星载SAR技术的发展趋势及应用浅析[J]. 雷达学报, 2012, 1(1): 1–10Deng Yun-kai, Zhao Feng-jun, and Wang Yu. Brief analysis on the development and application of spaceborne SAR[J]. Journal of Radars, 2012, 1(1): 1–10 [2] Lee J S and Pottier E. 洪文, 李洋, 尹嫱, 译. 极化雷达成像基础与应用[M]. 北京: 电子工业出版社, 2013: 199–223.Lee J S and Pottier E. Hong Wen, Li Yang, and Yin Qiang, Trans. Polarimetric Radar Imaging From Basics to Applications[M]. Beijing: Publishing House of Electronics Industry, 2013: 199–223. [3] Wiley C A. Synthetic aperture radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES-21(3): 440–443. DOI: 10.1109/TAES.1985.310578 [4] Freeman A, Johnson W T K, Huneycutt B, et al. The " myth” of the minimum SAR antenna area constraint[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(1): 320–324. DOI: 10.1109/36.823926 [5] Currie A and Brown M A. Wide-swath SAR[J]. IEE Proceedings F-Radar and Signal Processing, 1992, 139(2): 122–135. DOI: 10.1049/ip-f-2.1992.0016 [6] Younis M, Fischer C, and Wiesbeck W. Digital beamforming in SAR systems[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(7): 1735–1739. DOI: 10.1109/TGRS.2003.815662 [7] Mittermayer J and Runge H. Conceptual studies for exploiting the TerraSAR-X dual receive antenna[C]. Proceedings of 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 2003: 2140–2142. [8] Krieger G, Gebert N, and Moreira A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 1(4): 260–264. DOI: 10.1109/LGRS.2004.832700 [9] 齐维孔, 禹卫东. 基于滤波器组的星载SAR DPC-MAB技术方位向非均匀采样信号的重构[J]. 系统工程与电子技术, 2008, 30(7): 1218–1222Qi Wei-kong and Yu Wei-dong. Reconstruction of nonuniform azimuth sampling signals of space borne SAR DPC-MAB technique based on filter banks[J]. Systems Engineering and Electronics, 2008, 30(7): 1218–1222 [10] Li Zhen-fang, Wang Hong-yang, Su Tao, et al. Generation of wide-swath and high-resolution SAR images from multichannel small spaceborne SAR systems[J]. IEEE Geoscience and Remote Sensing Letters, 2005, 2(1): 82–86. DOI: 10.1109/LGRS.2004.840610 [11] 陈倩, 邓云凯, 刘亚东, 等. 基于自适应滤波的DPC-MAB SAR方位向信号重建[J]. 电子与信息学报, 2012, 34(6): 1331–1336Chen Qian, Deng Yun-kai, Liu Ya-dong, et al. SAR azimuth signal reconstruction based on adaptive filtering for the DPC-MAB SAR system[J]. Journal of Electronics&Information Technology, 2012, 34(6): 1331–1336 [12] Sikaneta I, Gierull C H, and Cerutti-Maori D. Optimum signal processing for multichannel SAR: With application to high-resolution wide-swath imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(10): 6095–6109. DOI: 10.1109/TGRS.2013.2294940 [13] Sikaneta I, Cerutti-Maori D, Klare J, et al.. Comparison of multi-channel high-resolution wide-swath SAR processing methods[C]. Proceedings of 2014 IEEE International Geoscience and Remote Sensing Symposium, Quebec, Canada, 2014: 3834–3837. [14] Liu Guang-yan, Wang You-lin, and Lin You-quan. Unambiguous reconstruction and imaging of nonuniform sampling SAR signals[C]. Proceedings of the 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 2007: 253–256. [15] Zhao Shuo, Wang R, Deng Yun-kai, et al. Modifications on multichannel reconstruction algorithm for SAR processing based on periodic nonuniform sampling theory and nonuniform fast fourier transform[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(11): 4998–5006. DOI: 10.1109/JSTARS.2015.2421303 [16] Siu W C and Hung K W. Review of image interpolation and super-resolution[C]. Proceedings of 2012 Asia-Pacific Signal & Information Processing Association Annual Summit and Conference, Hollywood, CA, 2012: 1–10. [17] 苏衡, 周杰, 张志浩. 超分辨率图像重建方法综述[J]. 自动化学报, 2013, 39(8): 1202–1213Su Heng, Zhou Jie, and Zhang Zhi-hao. Survey of super-resolution image reconstruction methods[J]. Acta Automatica Sinica, 2013, 39(8): 1202–1213 [18] 刘鹏, 刘定生, 李国庆. 基于矩阵秩估计偏移量的频域超分辨率重建[J]. 计算机工程, 2009, 35(15): 29–31, 34 doi: 10.3969/j.issn.1000-3428.2009.15.010Liu Peng, Liu Ding-sheng, and Li Guo-qing. Frequency field super-resolution reconstruction based on estimation offset of matrix rank[J]. Computer Engineering, 2009, 35(15): 29–31, 34. DOI: 10.3969/j.issn.1000-3428.2009.15.010 [19] Jiang Jun-jun, Ma Xiang, Chen Chen, et al. Single image super-resolution via locally regularized anchored neighborhood regression and nonlocal means[J]. IEEE Transactions on Multimedia, 2017, 19(1): 15–26. DOI: 10.1109/TMM.2016.2599145 [20] Tsai R Y and Huang T S. Multiframe image restoration and registration[J]. Advances in Computer Vision and Image Processing, 1984, 1(2): 317–339. [21] Oppenheim A V, Willsky A S, and Nawab S H. Signals and Systems[M]. Second Edition, Beijing: Publishing House of Electronics Industry, 2015: 190–200. [22] Proakis J G and Manolaki D G. 方艳梅, 刘永清, 译. 数字信号处理: 原理、算法与应用[M]. 第4版, 北京: 电子工业出版社, 2014: 332–350.Proakis J G and Manolaki D G. Fang Yan-mei and Liu Yong-qing, Trans. Digital Signal Processing: Principles, Algorithms, and Applications[M]. Fourth Edition, Beijing: Publishing House of Electronics Industry, 2014: 332–350. -











计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

