
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Research Progress on Coprime Array Signal Processing: Direction-of-Arrival Estimation and Adaptive Beamforming
-
摘要: 阵列信号处理是雷达领域各类应用的核心技术之一。近年来,互质阵列的提出打破了传统方法受限于奈奎斯特采样速率这一瓶颈,其稀疏布设的阵列结构和互质欠采样的信号处理方式大幅降低了系统所需的软硬件开销,为当前不断提升的实际应用需求提供了理论基础和技术前提。鉴于其在自由度、分辨率及计算复杂度等方面的性能优势,互质阵列信号处理的理论和技术研究受到了国内外学者的广泛关注。该文分别从波达方向估计和自适应波束成形这两个阵列信号处理领域的基本问题出发,介绍了互质阵列信号处理方向的研究进展。在互质阵列波达方向估计方面,该文总结了互质子阵分解方法和虚拟阵列信号处理方法等两类典型技术路线,并以此为基础介绍了压缩感知和无网格化技术在低复杂度和超分辨估计等方面的最新研究工作。在互质阵列波束成形方面,该文剖析了其与互质阵列波达方向估计问题的区别与联系,并介绍了面向互质阵列的高效鲁棒自适应波束成形设计方法。该文旨在通过对互质阵列信号处理研究前沿的分类归纳和总结,探讨各类方法的优势和未来的研究方向,为其在雷达等领域的产业需求和实际应用提供理论和技术参考。Abstract: Array signal processing is an essential tool in broad radar applications. The coprime array has recently been proposed to overcome the bottleneck caused by the Nyquist spatial sampling rate. The coprime array, whose sparse structure and undersampling feature drastically decrease necessary computational and hardware cost, provides a theoretical foundation and technical basis for the increasing demands of its practical applications. Considering its superior performance in degrees-of-freedom, spatial resolution, and computational complexity, research on coprime array signal processing has attracted much attention. This paper reviews recent research progress on coprime array signal processing, which has focused on both the Direction-of-Arrival (DOA) estimation and adaptive beamforming. From the perspective of coprime array DOA estimation, this paper summarizes two typical approaches, namely the coprime subarray decomposition-based approach and the virtual array signal processing-based approach. Moreover, recent work on low-complexity and super-resolution DOA estimation via compressive sensing and gridless techniques is also introduced. From the perspective of coprime array adaptive beamforming, the differences and relationships between DOA estimation and beamforming in the framework of coprime array signal processing are discussed, and an efficient, robust, and adaptive beamformer design tailored for the coprime array is introduced. Advantages and the future directions of coprime array signal processing are discussed, along with the theoretical basis and a technical reference for practical radar applications.
-
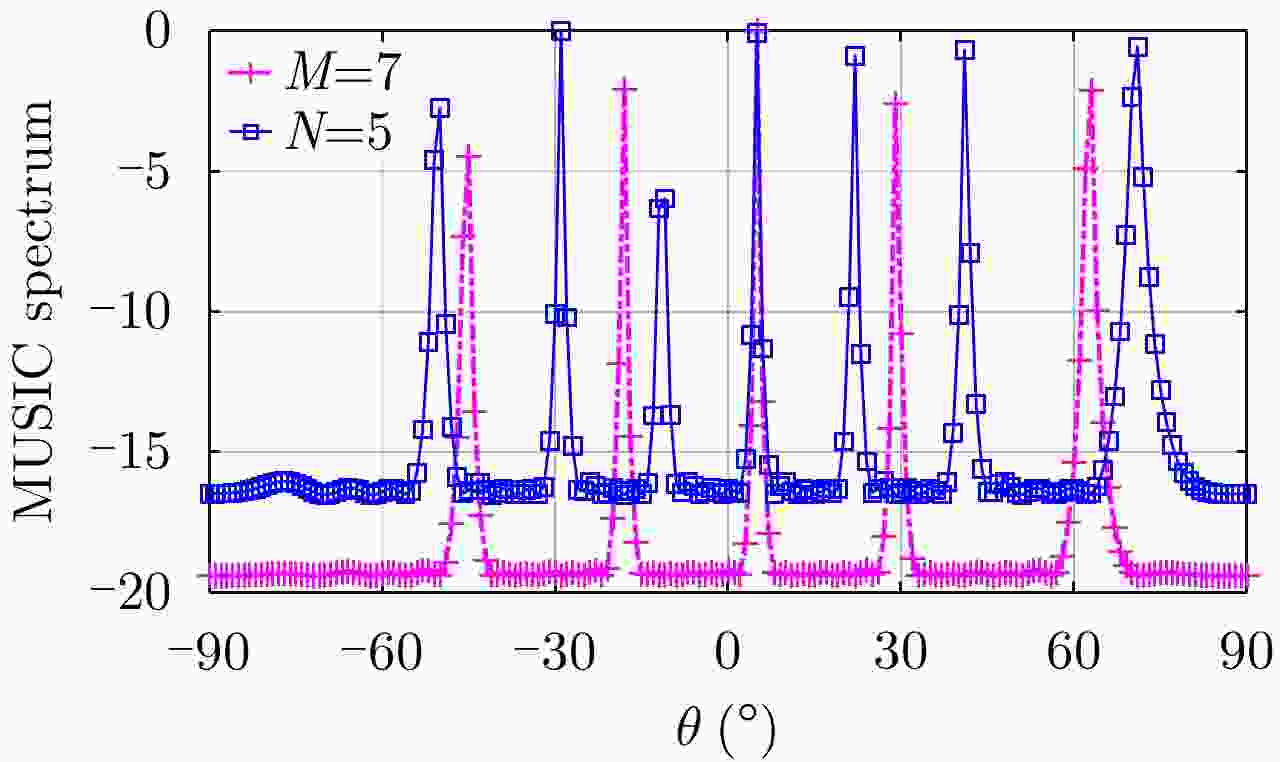
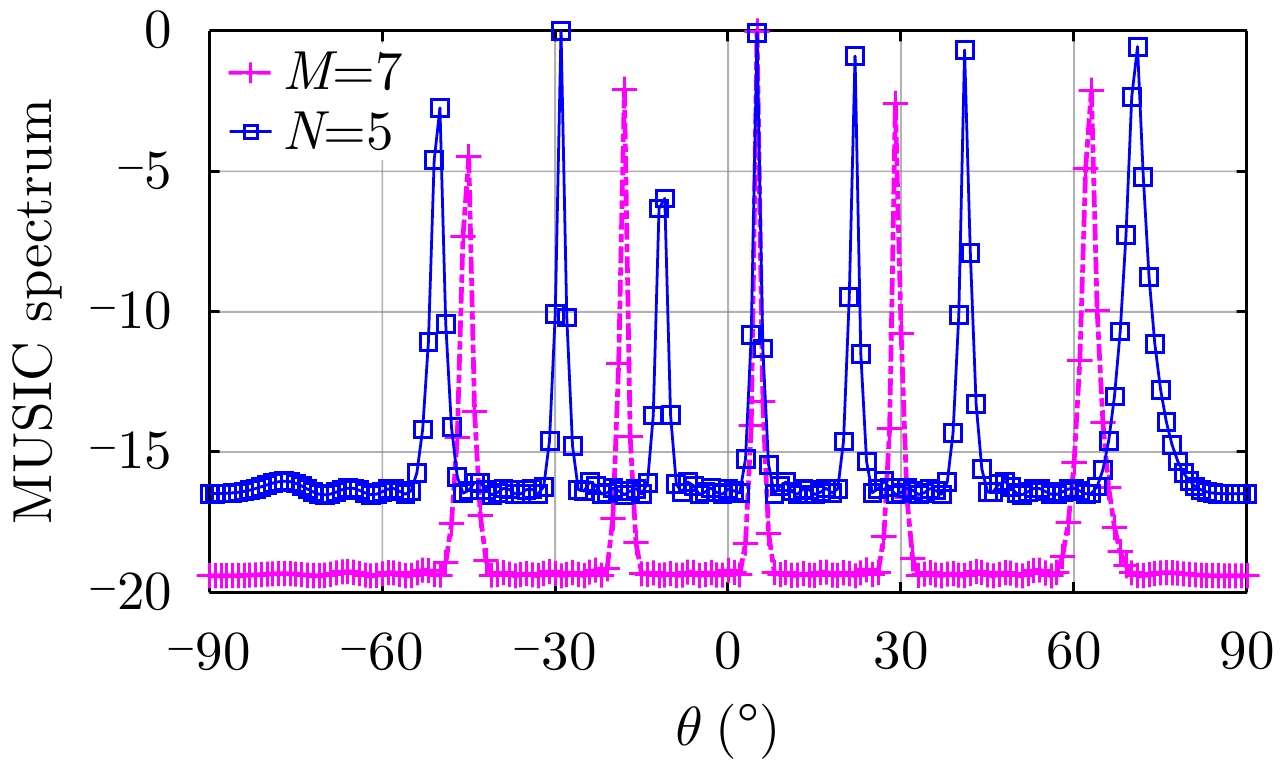
图 2 互质子阵列的MUSIC空间谱相位模糊示意图
Figure 2. Phase ambiguity of the pair of coprime subarray in the MUSIC spatial spectrum
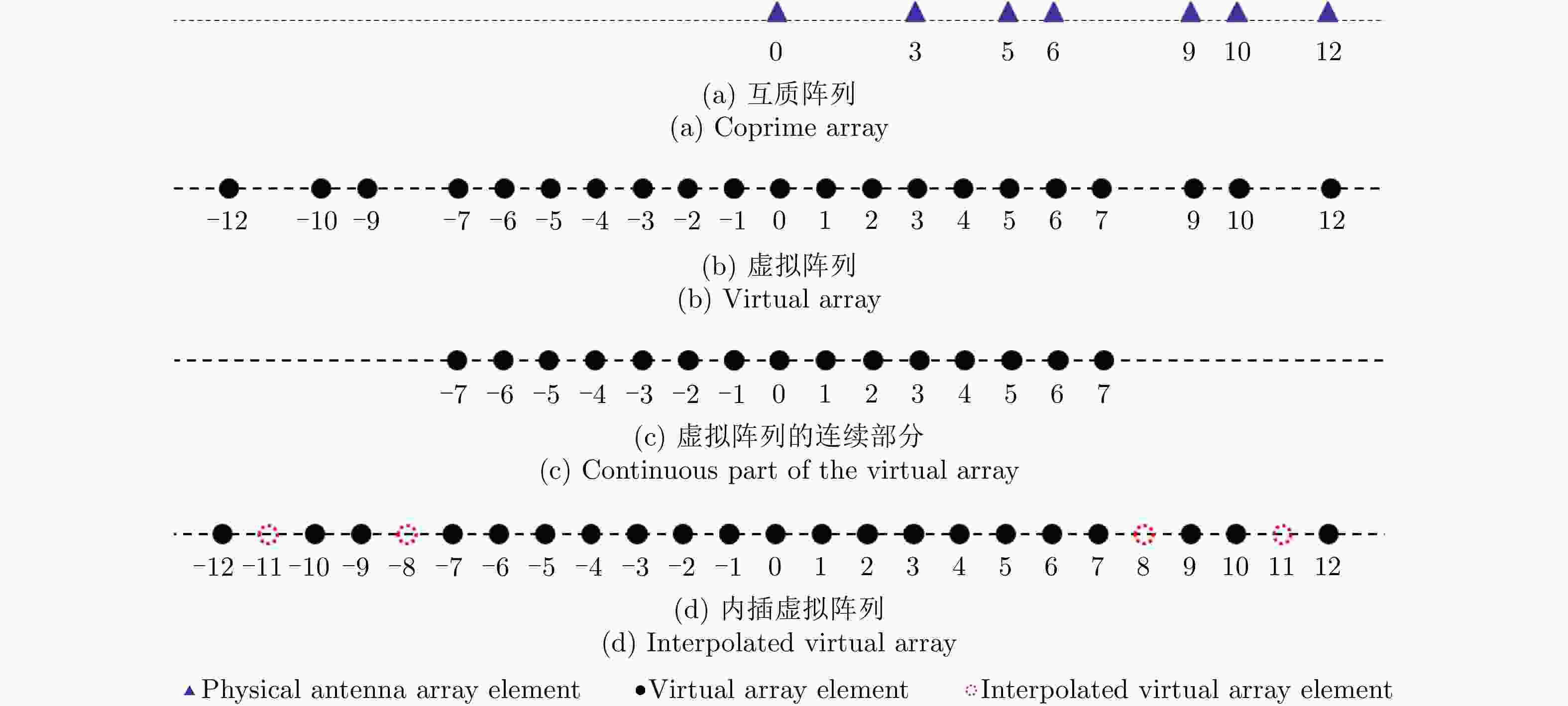
图 4 互质阵列及其对应的各种虚拟域阵列结构示意图
Figure 4. Illustration of the coprime array and its corresponding virtual array structures

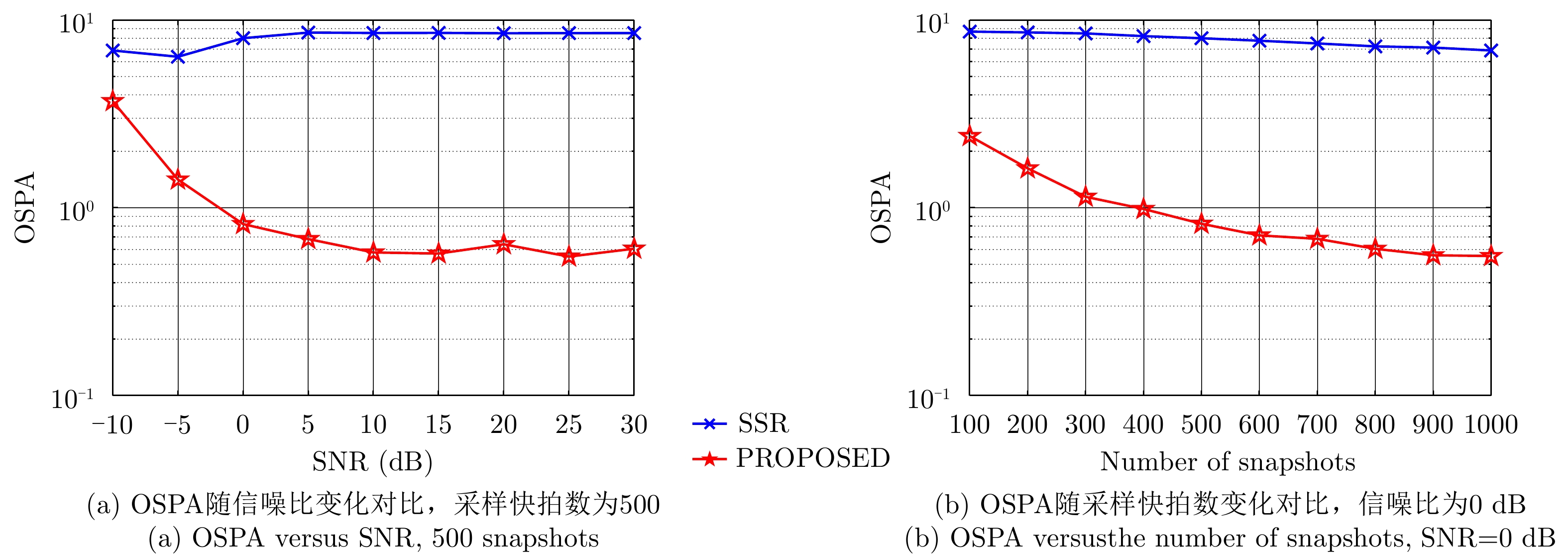
图 5 单个随机信号源情况下的波达方向估计性能对比
Figure 5. Comparison of DOA estimation performance under the single random source scenario
-
[1] VON AULOCK W H. Properties of phased arrays[J]. Proceedings of the IRE, 1960, 48(10): 1715–1727. doi: 10.1109/JRPROC.1960.287523 [2] MAILLOUX R J. Phased array theory and technology[J]. Proceedings of the IEEE, 1982, 70(3): 246–291. doi: 10.1109/PROC.1982.12285 [3] WARD C, HARGRAVE P, and MCWHIRTER J. A novel algorithm and architecture for adaptive digital beamforming[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3): 338–346. doi: 10.1109/TAP.1986.1143818 [4] TALISA S H, O’HAVER K W, COMBERIATE T M, et al. Benefits of digital phased array radars[J]. Proceedings of the IEEE, 2016, 104(3): 530–543. doi: 10.1109/JPROC.2016.2515842 [5] CAPON J. High-resolution frequency-wavenumber spectrum analysis[J]. Proceedings of the IEEE, 1969, 57(8): 1408–1418. doi: 10.1109/PROC.1969.7278 [6] FROST O and SULLIVAN T. High-resolution two-dimensional spectral analysis[C]. 1979 IEEE International Conference on Acoustics, Speech, and Signal Processing, Washington, USA, 1979: 673–676. [7] WAX M, SHAN T J, and KAILATH T. Spatio-temporal spectral analysis by eigenstructure methods[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1984, 32(4): 817–827. doi: 10.1109/TASSP.1984.1164400 [8] LEMMA A N, VAN DER VEEN A J, and DEPRETTERE E F. Joint angle-frequency estimation using multi-resolution ESPRIT[C]. 1998 IEEE International Conference on Acoustics, Speech and Signal Processing, Seattle, USA, 1998: 1957–1960. [9] TSAKALIDES P, RASPANTI R, and NIKIAS C L. Angle/Doppler estimation in heavy-tailed clutter backgrounds[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2): 419–436. doi: 10.1109/7.766926 [10] LU Lu, LI G Y, LEE SWINDLEHURST A, et al. An overview of massive MIMO: Benefits and challenges[J]. IEEE Journal of Selected Topics in Signal Processing, 2014, 8(5): 742–758. doi: 10.1109/JSTSP.2014.2317671 [11] LI Jian and STOICA P. MIMO Radar Signal Processing[M]. Hoboken: Wiley & Sons, 2009. [12] LI Jian, BLUM R S, STOICA P, et al. Introduction to the issue on MIMO radar and its applications[J]. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(1): 2–4. doi: 10.1109/JSTSP.2010.2040416 [13] 周伟, 刘永祥, 黎湘, 等. MIMO-SAR技术发展概况及应用浅析[J]. 雷达学报, 2014, 3(1): 10–18. doi: 10.3724/SP.J.1300.2013.13074ZHOU Wei, LIU Yongxiang, LI Xiang, et al. Brief analysis on the development and application of Multi-Input Multi-Output synthetic aperture radar[J]. Journal of Radars, 2014, 3(1): 10–18. doi: 10.3724/SP.J.1300.2013.13074 [14] 高敬坤, 邓彬, 秦玉亮, 等. 扫描MIMO阵列近场三维成像技术[J]. 雷达学报, 2018, 7(6): 676–684. doi: 10.12000/JR18102GAO Jingkun, DENG Bin, QIN Yuliang, et al. Near-field 3D SAR imaging techniques using a scanning MIMO array[J]. Journal of Radars, 2018, 7(6): 676–684. doi: 10.12000/JR18102 [15] CHEN Jinli, GU Hong, and SU Weimin. A new method for joint DOD and DOA estimation in bistatic MIMO radar[J]. Signal Processing, 2010, 90(2): 714–718. doi: 10.1016/j.sigpro.2009.08.003 [16] WEN Fangqing, ZHANG Zijing, WANG Ke, et al. Angle estimation and mutual coupling self-calibration for ULA-based bistatic MIMO radar[J]. Signal Processing, 2018, 144: 61–67. doi: 10.1016/j.sigpro.2017.09.021 [17] WEN Fangqing, XIONG Xiaodong, and ZHANG Zijing. Angle and mutual coupling estimation in bistatic MIMO radar based on PARAFAC decomposition[J]. Digital Signal Processing, 2017, 65: 1–10. doi: 10.1016/j.dsp.2017.02.011 [18] LIN Y C, LEE T S, PAN Yunhan, et al. Low-complexity high-resolution parameter estimation for automotive MIMO radars[J]. IEEE Access, 2019. doi: 10.1109/ACCESS.2019.2926413 [19] AMIRI R, BEHNIA F, and NOROOZI A. Efficient joint moving target and antenna localization in distributed MIMO radars[J]. IEEE Transactions on Wireless Communications, 2019, 18(9): 4425–4435. doi: 10.1109/TWC.2019.2924626 [20] MAO Chenxing, WEN Fangqing, ZHANG Zijing, et al. New approach for DOA estimation in MIMO radar with nonorthogonal waveforms[J]. IEEE Sensors Letters, 2019, 3(7): 7001104. [21] WEN Fangqing. Computationally efficient DOA estimation algorithm for MIMO radar with imperfect waveforms[J]. IEEE Communications Letters, 2019, 23(6): 1037–1040. doi: 10.1109/LCOMM.2019.2911285 [22] WEN Fangqing, XIONG Xiaodong, SU Jian, et al. Angle estimation for bistatic MIMO radar in the presence of spatial colored noise[J]. Signal Processing, 2017, 134: 261–267. doi: 10.1016/j.sigpro.2016.12.017 [23] FU Xiuwen, CAO Renzheng, and WEN Fangqing. A de-noising 2-D-DOA estimation method for uniform rectangle array[J]. IEEE Communications Letters, 2018, 22(9): 1854–1857. doi: 10.1109/LCOMM.2018.2849724 [24] WEN Fangqing, ZHANG Xinyu, and ZHANG Zijing. CRBs for direction-of-departure and direction-of-arrival estimation in collocated MIMO radar in the presence of unknown spatially coloured noise[J]. IET Radar, Sonar & Navigation, 2019, 13(4): 530–537. [25] WEN Fangqing, WU Lei, CAI Changxin, et al. Joint DOD and DOA estimation for bistatic MIMO radar in the presence of combined array errors[C]. The 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop, Sheffield, UK, 2018: 174–178. [26] KLEMM R. Introduction to space-time adaptive processing[J]. Electronics & Communication Engineering Journal, 1999, 11(1): 5–12. [27] 王珽, 赵拥军, 胡涛. 机载MIMO雷达空时自适应处理技术研究进展[J]. 雷达学报, 2015, 4(2): 136–148. doi: 10.12000/JR14091WANG Ting, ZHAO Yongjun, and HU Tao. Overview of space-time adaptive processing for airborne Multiple-Input Multiple-Output radar[J]. Journal of Radars, 2015, 4(2): 136–148. doi: 10.12000/JR14091 [28] 谢文冲, 段克清, 王永良. 机载雷达空时自适应处理技术研究综述[J]. 雷达学报, 2017, 6(6): 575–586. doi: 10.12000/JR17073XIE Wenchong, DUAN Keqing, and WANG Yongliang. Space time adaptive processing technique for airborne radar: An overview of its development and prospects[J]. Journal of Radars, 2017, 6(6): 575–586. doi: 10.12000/JR17073 [29] FU Dongning, WEN Jun, XU Jingwei, et al. STAP-based airborne radar system for maneuvering target detection[J]. IEEE Access, 2019, 7: 62071–62079. doi: 10.1109/ACCESS.2019.2914224 [30] HE Tuan and ZHANG Yu. A MIMO radar STAP method based on sparse dictionary atomic selection[C]. The 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference, Chengdu, China, 2019: 433–436. [31] JIA Fengde, SUN Guohao, HE Zishu, et al. Grating-lobe clutter suppression in uniform subarray for airborne radar STAP[J]. IEEE Sensors Journal, 2019, 19(16): 6956–6965. doi: 10.1109/JSEN.2019.2912827 [32] LU Lei, ZHOU Chengwei, SHI Zhiguo, et al. Off-grid angle-Doppler estimation for space-time adaptive processing: A sequential approach[C]. 2019 IEEE/CIC International Conference on Communications in China, Changchun, China, 2019: 231–236. [33] VAIDYANATHAN P P and PAL P. Sparse sensing with co-prime samplers and arrays[J]. IEEE Transactions on Signal Processing, 2011, 59(2): 573–586. doi: 10.1109/TSP.2010.2089682 [34] WANG Huafei, WAN Liangtian, DONG Mianxiong, et al. Assistant vehicle localization based on three collaborative base stations via SBL-based robust DOA estimation[J]. IEEE Internet of Things Journal, 2019, 6(3): 5766–5777. doi: 10.1109/JIOT.2019.2905788 [35] WU Xiaohuan, ZHU Weiping, and YAN Jun. A high-resolution DOA estimation method with a family of nonconvex penalties[J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4925–4938. doi: 10.1109/TVT.2018.2817638 [36] 周超伟, 李真芳, 王跃锟, 等. 联合多方位角调频率估计的星载SAR三维成像方法[J]. 雷达学报, 2018, 7(6): 696–704. doi: 10.12000/JR18094ZHOU Chaowei, LI Zhenfang, WANG Yuekun, et al. Space-borne SAR three-dimensional imaging by joint multiple azimuth angle Doppler frequency rate estimation[J]. Journal of Radars, 2018, 7(6): 696–704. doi: 10.12000/JR18094 [37] ZHOU Chengwei, SHI Zhiguo, GU Yujie, et al. DECOM: DOA estimation with combined MUSIC for coprime array[C]. 2013 International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 2013: 1–5. [38] SUN Fenggang, GAO Bin, CHEN Lizhen, et al. A low-complexity ESPRIT-based DOA estimation method for co-prime linear arrays[J]. Sensors, 2016, 16(9): 1367. doi: 10.3390/s16091367 [39] ZHANG Dong, ZHANG Yongshun, ZHENG Guimei, et al. Improved DOA estimation algorithm for co-prime linear arrays using root-MUSIC algorithm[J]. Electronics Letters, 2017, 53(18): 1277–1279. doi: 10.1049/el.2017.2292 [40] YAN Fenggang, LIU Shuai, WANG Jun, et al. Fast DOA estimation using co-prime array[J]. Electronics Letters, 2018, 54(7): 409–410. doi: 10.1049/el.2017.2491 [41] LI Jianfeng, SHEN Mingwei, and JIANG Defu. Fast direction of arrival estimation using a sensor-saving coprime array with enlarged inter-element spacing[C]. The 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop, Sheffield, UK, 2018: 179–183. [42] ZHENG Wang, ZHANG Xiaofei, GONG Pan, et al. DOA estimation for coprime linear arrays: An ambiguity-free method involving full DOFs[J]. IEEE Communications Letters, 2018, 22(3): 562–565. doi: 10.1109/LCOMM.2017.2787698 [43] LI Jianfeng and ZHANG Xiaofei. Direction of arrival estimation of Quasi-Stationary signals using unfolded coprime array[J]. IEEE Access, 2017, 5: 6538–6545. doi: 10.1109/ACCESS.2017.2695581 [44] PAL P and VAIDYANATHAN P P. Coprime sampling and the MUSIC algorithm[C]. Proceedings of 2011 Digital Signal Processing and Signal Processing Education Meeting, Sedona, USA, 2011: 289–294. [45] LIU Chunlin and VAIDYANATHAN P P. Coprime arrays and samplers for space-time adaptive processing[C]. 2015 IEEE International Conference on Acoustics, Speech and Signal Processing, Brisbane, Australia, 2015: 2364–2368. [46] ZHOU Chengwei and ZHOU Jinfang. Direction-of-arrival estimation with coarray ESPRIT for coprime array[J]. Sensors, 2017, 17(8): 1779. doi: 10.3390/s17081779 [47] TAN Zhao, ELDAR Y C, and NEHORAI A. Direction of arrival estimation using co-prime arrays: A super resolution viewpoint[J]. IEEE Transactions on Signal Processing, 2014, 62(21): 5565–5576. doi: 10.1109/TSP.2014.2354316 [48] PAL P and VAIDYANATHAN P P. On application of LASSO for sparse support recovery with imperfect correlation awareness[C]. 2012 Conference Record of the Forty Sixth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, USA, 2012: 958–962. [49] PAL P and VAIDYANATHAN P P. Correlation-aware techniques for sparse support recovery[C]. 2012 IEEE Statistical Signal Processing Workshop, Ann Arbor, USA, 2012: 53–56. [50] LV Wanghan and WANG Huali. Joint DOA and frequency estimation based on spatio-temporal co-prime sampling[C]. 2015 International Conference on Wireless Communications & Signal Processing, Nanjing, China, 2015: 1–5. [51] QIN Si, ZHANG Y D, and AMIN M G. Multi-target localization using frequency diverse coprime arrays with coprime frequency offsets[C]. 2016 IEEE Radar Conference, Philadelphia, USA, 2016: 1–5. [52] ZHANG Y D, AMIN M G, and HIMED B. Sparsity-based DOA estimation using co-prime arrays[C]. 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, Canada, 2013: 3967–3971. [53] QIN Si, ZHANG Y D, AMIN M G, et al. Generalized coprime sampling of Toeplitz matrices for spectrum estimation[J]. IEEE Transactions on Signal Processing, 2017, 65(1): 81–94. doi: 10.1109/TSP.2016.2614799 [54] QIN Si, ZHANG Y D, and AMIN M G. Generalized coprime array configurations for direction-of-arrival estimation[J]. IEEE Transactions on Signal Processing, 2015, 63(6): 1377–1390. doi: 10.1109/TSP.2015.2393838 [55] SHI Junpeng, HU Guoping, ZHANG Xiaofei, et al. Sparsity-based two-dimensional DOA estimation for coprime array: From sum-difference coarray viewpoint[J]. IEEE Transactions on Signal Processing, 2017, 65(21): 5591–5604. doi: 10.1109/TSP.2017.2739105 [56] SHI Junpeng, HU Guoping, ZHANG Xiaofei, et al. Sparsity-based DOA estimation of coherent and uncorrelated targets with flexible MIMO radar[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5835–5848. doi: 10.1109/TVT.2019.2913437 [57] ZHOU Chengwei, SHI Zhiguo, GU Yujie, et al. DOA estimation by covariance matrix sparse reconstruction of coprime array[C]. 2015 IEEE International Conference on Acoustics, Speech and Signal Processing, Brisbane, Australia, 2015: 2369–2373. [58] SHI Zhiguo, ZHOU Chengwei, GU Yujie, et al. Source estimation using coprime array: A sparse reconstruction perspective[J]. IEEE Sensors Journal, 2017, 17(3): 755–765. doi: 10.1109/JSEN.2016.2637059 [59] ZHENG Yunmei, SHI Zhiguo, LU Rongxing, et al. An efficient data-driven particle PHD filter for multitarget tracking[J]. IEEE Transactions on Industrial Informatics, 2013, 9(4): 2318–2326. doi: 10.1109/TII.2012.2228875 [60] GU Yujie, GOODMAN N A, HONG Shaohua, et al. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction[J]. Signal Processing, 2014, 96: 375–381. doi: 10.1016/j.sigpro.2013.10.009 [61] GU Yujie and GOODMAN N A. Information-theoretic compressive sensing kernel optimization and Bayesian Cramér-Rao bound for time delay estimation[J]. IEEE Transactions on Signal Processing, 2017, 65(17): 4525–4537. doi: 10.1109/TSP.2017.2706187 [62] YU Wenbin, CHEN Cailian, HE Tian, et al. Adaptive compressive engine for real-time electrocardiogram monitoring under unreliable wireless channels[J]. IET Communications, 2016, 10(6): 607–615. doi: 10.1049/iet-com.2015.0882 [63] DING Wenbo, YANG Fang, LIU Sicong, et al. Structured compressive sensing-based non-orthogonal time-domain training channel state information acquisition for multiple input multiple output systems[J]. IET Communications, 2016, 10(6): 685–690. doi: 10.1049/iet-com.2015.0697 [64] ZHOU Chengwei, GU Yujie, ZHANG Y D, et al. Compressive sensing-based coprime array direction-of-arrival estimation[J]. IET Communications, 2017, 11(11): 1719–1724. doi: 10.1049/iet-com.2016.1048 [65] GUO Muran, ZHANG Y D, and CHEN Tao. DOA estimation using compressed sparse array[J]. IEEE Transactions on Signal Processing, 2018, 66(15): 4133–4146. doi: 10.1109/TSP.2018.2847645 [66] GU Yujie, ZHANG Y D, and GOODMAN N A. Optimized compressive sensing-based direction-of-arrival estimation in massive MIMO[C]. 2017 IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, USA, 2017: 3181–3185. [67] BOUDAHER E, JIA Yong, AHMAD F, et al. Multi-frequency co-prime arrays for high-resolution direction-of-arrival estimation[J]. IEEE Transactions on Signal Processing, 2015, 63(14): 3797–3808. doi: 10.1109/TSP.2015.2432734 [68] LIU Chunlin, VAIDYANATHAN P P, and PAL P. Coprime coarray interpolation for DOA estimation via nuclear norm minimization[C]. 2016 IEEE International Symposium on Circuits and Systems, Montreal, Canada, 2016: 2639–2642. [69] HOSSEINI S M and SEBT M A. Array interpolation using covariance matrix completion of minimum-size virtual array[J]. IEEE Signal Processing Letters, 2017, 24(7): 1063–1067. doi: 10.1109/LSP.2017.2708750 [70] YANG Zai and XIE Lihua. On gridless sparse methods for line spectral estimation from complete and incomplete data[J]. IEEE Transactions on Signal Processing, 2015, 63(12): 3139–3153. doi: 10.1109/TSP.2015.2420541 [71] CANDÈS E J and FERNANDEZ-GRANDA C. Towards a mathematical theory of super-resolution[J]. Communications on Pure and applied Mathematics, 2014, 67(6): 906–956. doi: 10.1002/cpa.21455 [72] YANG Zai, XIE Lihua, and ZHANG Cishen. A discretization-free sparse and parametric approach for linear array signal processing[J]. IEEE Transactions on Signal Processing, 2014, 62(19): 4959–4973. doi: 10.1109/TSP.2014.2339792 [73] YANG Zai, LI Jian, STOICA P, et al. Sparse methods for direction-of-arrival estimation[M]. CHELLAPPA R and THEODORIDIS S. Academic Press Library in Signal Processing, Volume 7: Array, Radar and Communications Engineering. Amsterdam: Academic Press, 2018: 509–581. [74] WU Xiaohuan, ZHU Weiping, YAN Jun, et al. Two sparse-based methods for off-grid direction-of-arrival estimation[J]. Signal Processing, 2018, 142: 87–95. doi: 10.1016/j.sigpro.2017.07.004 [75] WU Xiaohuan, ZHU Weiping, and YAN Jun. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning[J]. IEEE Sensors Journal, 2016, 16(7): 2004–2016. doi: 10.1109/JSEN.2015.2508059 [76] LI Jianfeng, LI Yunxiang, and ZHANG Xiaofei. Two-dimensional off-grid DOA estimation using unfolded parallel coprime array[J]. IEEE Communications Letters, 2018, 22(12): 2495–2498. doi: 10.1109/LCOMM.2018.2872955 [77] PAN Jie, ZHOU Changling, LIU Bo, et al. Joint DOA and Doppler frequency estimation for coprime arrays and samplers based on continuous compressed sensing[C]. 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–5. [78] FAN Xing, ZHOU Chengwei, GU Yujie, et al. Toeplitz matrix reconstruction of interpolated coprime virtual array for DOA estimation[C]. The 2017 IEEE 85th Vehicular Technology Conference, Sydney, Australia, 2017: 1–5. [79] ZHOU Chengwei, GU Yujie, FAN Xing, et al. Direction-of-arrival estimation for coprime array via virtual array interpolation[J]. IEEE Transactions on Signal Processing, 2018, 66(22): 5956–5971. doi: 10.1109/TSP.2018.2872012 [80] ZHOU Chengwei, SHI Zhiguo, GU Yujie, et al. Coarray interpolation-based coprime array DOA estimation via covariance matrix reconstruction[C]. 2018 IEEE International Conference on Acoustics, Speech and Signal Processing, Calgary, Canada, 2018: 3479–3483. [81] ZHOU Chengwei, GU Yujie, SHI Zhiguo, et al. Off-grid direction-of-arrival estimation using coprime array interpolation[J]. IEEE Signal Processing Letters, 2018, 25(11): 1710–1714. doi: 10.1109/LSP.2018.2872400 [82] WU Xiaohuan, ZHU Weiping, and YAN Jun. A Toeplitz covariance matrix reconstruction approach for direction-of-arrival estimation[J]. IEEE Transactions on Vehicular Technology, 2017, 66(9): 8223–8237. doi: 10.1109/TVT.2017.2695226 [83] WU Xiaohuan, ZHU Weiping, and YAN Jun. A fast gridless covariance matrix reconstruction method for one- and two-dimensional direction-of-arrival estimation[J]. IEEE Sensors Journal, 2017, 17(15): 4916–4927. doi: 10.1109/JSEN.2017.2709329 [84] SHEN Yifan, ZHOU Chengwei, GU Yujie, et al.. Vandermonde decomposition of coprime coarray covariance matrix for DOA estimation[C]. Proceedings of the 18th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Sapporo, Hokkaido, Japan, 2017: 1–5. [85] DU Lin, YARDIBI T, LI Jian, et al. Review of user parameter-free robust adaptive beamforming algorithms[J]. Digital Signal Processing, 2009, 19(4): 567–582. doi: 10.1016/j.dsp.2009.02.001 [86] CHOI Y H. Subspace based adaptive beamforming method with low complexity[J]. Electronics Letters, 2011, 47(9): 529–530. doi: 10.1049/el.2011.0512 [87] FELDMAN D D and GRIFFITHS L J. A projection approach for robust adaptive beamforming[J]. IEEE Transactions on Signal Processing, 1994, 42(4): 867–876. doi: 10.1109/78.285650 [88] LI Jian, STOICA P, and WANG Zhisong. On robust capon beamforming and diagonal loading[J]. IEEE Transactions on Signal Processing, 2003, 51(7): 1702–1715. doi: 10.1109/TSP.2003.812831 [89] BELL K L, EPHRAIM Y, and VAN TREES H L. A Bayesian approach to robust adaptive beamforming[J]. IEEE Transactions on Signal Processing, 2000, 48(2): 386–398. doi: 10.1109/78.823966 [90] VOROBYOV S A, GERSHMAN A B, and LUO Zhiquan. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem[J]. IEEE Transactions on Signal Processing, 2003, 51(2): 313–324. doi: 10.1109/TSP.2002.806865 [91] GU Yujie and LESHEM A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation[J]. IEEE Transactions on Signal Processing, 2012, 60(7): 3881–3885. doi: 10.1109/TSP.2012.2194289 [92] ZHOU Chengwei, GU Yujie, SONG Wenzhan, et al. Robust adaptive beamforming based on DOA support using decomposed coprime subarrays[C]. 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 2986–2990. [93] ZHOU Chengwei, GU Yujie, HE Shibo, et al. A robust and efficient algorithm for coprime array adaptive beamforming[J]. IEEE Transactions on Vehicular Technology, 2018, 67(2): 1099–1112. doi: 10.1109/TVT.2017.2704610 [94] REED I S, MALLETT J D, and BRENNAN L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, AES-10(6): 853–863. doi: 10.1109/TAES.1974.307893 [95] ZHOU Chengwei, SHI Zhiguo, and GU Yujie. Coprime array adaptive beamforming with enhanced degrees-of-freedom capability[C]. 2017 IEEE Radar Conference, Seattle, USA, 2017: 1357–1361. [96] HUANG Jiyan, WANG Peng, and WAN Qun. Sidelobe suppression for blind adaptive beamforming with sparse constraint[J]. IEEE Communications Letters, 2011, 15(3): 343–345. doi: 10.1109/LCOMM.2011.012511.102215 [97] GU Yujie, ZHOU Chengwei, GOODMAN N A, et al. Coprime array adaptive beamforming based on compressive sensing virtual array signal[C]. 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 2981–2985. [98] LIU Jianyan, ZHANG Yanmei, LU Yilong, et al. Augmented nested arrays with enhanced DOF and reduced mutual coupling[J]. IEEE Transactions on Signal Processing, 2017, 65(21): 5549–5563. doi: 10.1109/TSP.2017.2736493 [99] ZHENG Wang, ZHANG Xiaofei, and ZHAI Hui. Generalized coprime planar array geometry for 2-D DOA estimation[J]. IEEE Communications Letters, 2017, 21(5): 1075–1078. doi: 10.1109/LCOMM.2017.2664809 [100] YANG M, HAIMOVICH A M, CHEN Baixiao, et al. A new array geometry for DOA estimation with enhanced degrees of freedom[C]. 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 3041–3045. [101] RAZA A, LIU Wei, and SHEN Qing. Thinned coprime arrays for DOA estimation[C]. The 2017 25th European Signal Processing Conference, Kos, Greece, 2017: 395–399. [102] XU Haiyun, ZHANG Yankui, and BA Bin. Direction finding using coprime array with sensor gain and phase errors[C]. 2017 International Conference on Computer Technology, Electronics and Communication, Dalian, China, 2017: 880–885. [103] TIAN Ye, SHI Hongyin, and XU He. DOA estimation in the presence of unknown non-uniform noise with coprime array[J]. Electronics Letters, 2017, 53(2): 113–115. doi: 10.1049/el.2016.3944 [104] LI Conghui, GAN Lu, and LING Cong. 2D MIMO radar with coprime arrays[C]. The 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop, Sheffield, UK, 2018: 612-616. [105] 王龙刚, 李廉林. 基于互质阵列雷达技术的近距离目标探测方法[J]. 雷达学报, 2016, 5(3): 244–253. doi: 10.12000/JR16022WANG Longgang and LI Lianlin. Short-range radar detection with (M, N)-coprime array configurations[J]. Journal of Radars, 2016, 5(3): 244–253. doi: 10.12000/JR16022 [106] SHI Junpeng, HU Guoping, ZHANG Xiaofei, et al. Generalized co-prime MIMO radar for DOA estimation with enhanced degrees of freedom[J]. IEEE Sensors Journal, 2018, 18(3): 1203–1212. doi: 10.1109/JSEN.2017.2782746 [107] YANG Minglei, SUN Lei, YUAN Xin, et al. A new nested MIMO array with increased degrees of freedom and hole-free difference coarray[J]. IEEE Signal Processing Letters, 2018, 25(1): 40–44. doi: 10.1109/LSP.2017.2766294 [108] LI Jianfeng, ZHANG Xiaofei, and JIANG Defu. DOD and DOA estimation for bistatic coprime MIMO radar based on combined ESPRIT[C]. Proceedings of 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–4. [109] ZHANG Zongyu, ZHOU Chengwei, GU Yujie, et al. FFT-based DOA estimation for coprime MIMO radar: A Hardware-Friendly approach[C]. Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing, Shanghai, China, 2018: 1–5. [110] TAO Yu, ZHANG Gong, and LI Daren. Coprime sampling with deterministic digital filters in compressive sensing radar[C]. 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–4. [111] ZHANG Zongyu, ZHOU Chengwei, GU Yujie, et al. An IDFT approach for coprime array direction-of-arrival estimation[J]. Digital Signal Processing, 2019. doi: 10.1016/j.dsp.2019.05.006 [112] LI Jianfeng, SHEN Mingwei, and DING Ji. Direction of arrival estimation for co-prime MIMO radar based on unitary root-MUSIC[C]. The 2015 2nd International Conference on Wireless Communication and Sensor Network, Changsha, China, 2016: 307–315. [113] LI Jianfeng, JIANG Defu, and ZHANG Xiaofei. DOA estimation based on combined unitary ESPRIT for coprime MIMO radar[J]. IEEE Communications Letters, 2017, 21(1): 96–99. doi: 10.1109/LCOMM.2016.2618789 [114] JIA Yong, ZHONG Xiaoling, GUO Yong, et al. DOA and DOD estimation based on bistatic MIMO radar with co-prime array[C]. 2017 IEEE Radar Conference, Seattle, USA, 2017: 394–397. [115] ZHANG Zongyu, ZHOU Chengwei, GU Yujie, et al. Efficient DOA estimation for coprime array via inverse discrete Fourier transform[C]. The 2018 IEEE 23rd International Conference on Digital Signal Processing, Shanghai, China, 2018: 1–5. [116] LI Jianfeng and JIANG Defu. Low-complexity propagator based two dimensional angle estimation for coprime MIMO radar[J]. IEEE Access, 2018, 6: 13931–13938. doi: 10.1109/ACCESS.2018.2813014 -

 下载:
下载:




图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

