
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Detection Performance Analysis for Distributed MIMO Radar
-
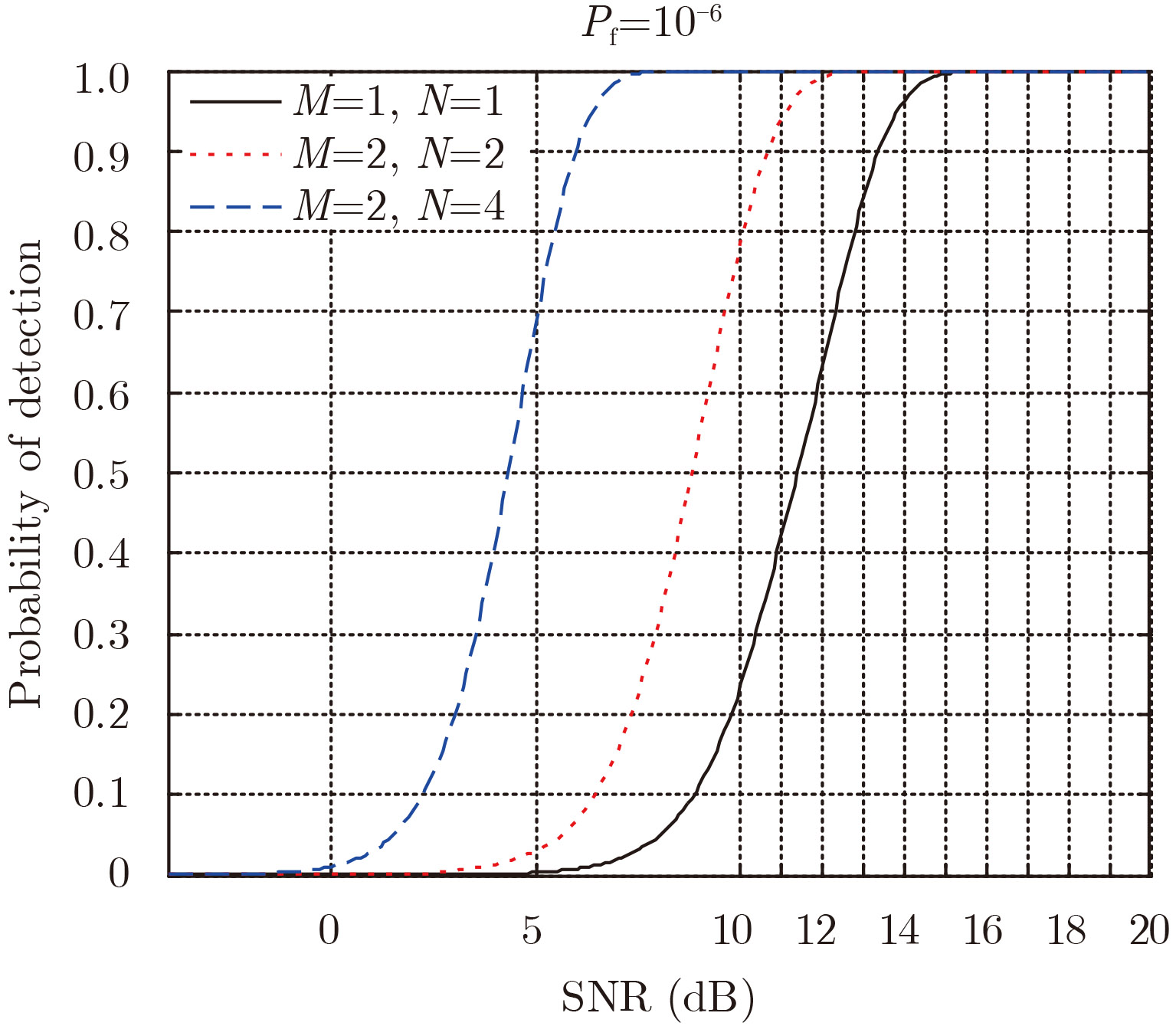
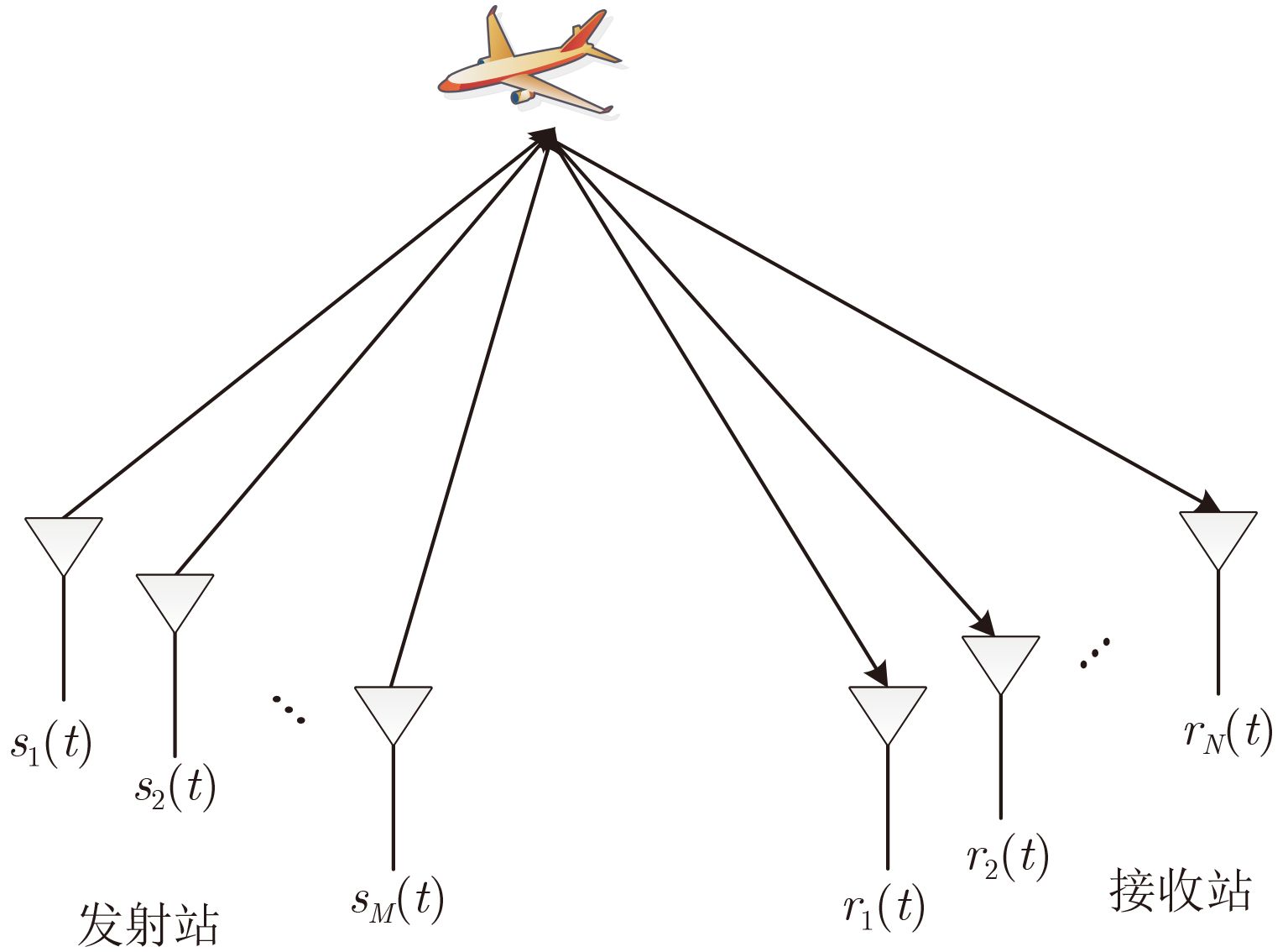
摘要: 针对分布式MIMO雷达目标检测问题,该文首先根据分布式MIMO雷达站间的位置几何分布,给出了分布式MIMO雷达系统的3种形态:分布式相参MIMO雷达、相位随机MIMO雷达和幅相随机MIMO雷达。然后重点推导了低信噪比条件下相位随机和幅相随机MIMO雷达的平方律检测器结构,并详细分析了这两种检测器的检测性能。最后的仿真实验说明了该文的理论分析对实际工程具有一定的指导意义。Abstract: To address the problem of target detection in distributed MIMO radar, three styles of distributed MIMO radar systems are given in this paper. With respect to the geometric distribution relations of distributed MIMO radar, the styles are distributed coherent MIMO radar, random phase MIMO radar, and random amplitude-phase MIMO radar. Next, the square law detector structures of random phase and random amplitude-phase MIMO radar are derived in the paper when there is a low signal-to-noise ratio, and the performance of the two detectors are analyzed as well. Finally, simulation results demonstrate the theoretical analysis of this paper are of guiding significance for the actual engineering.
-

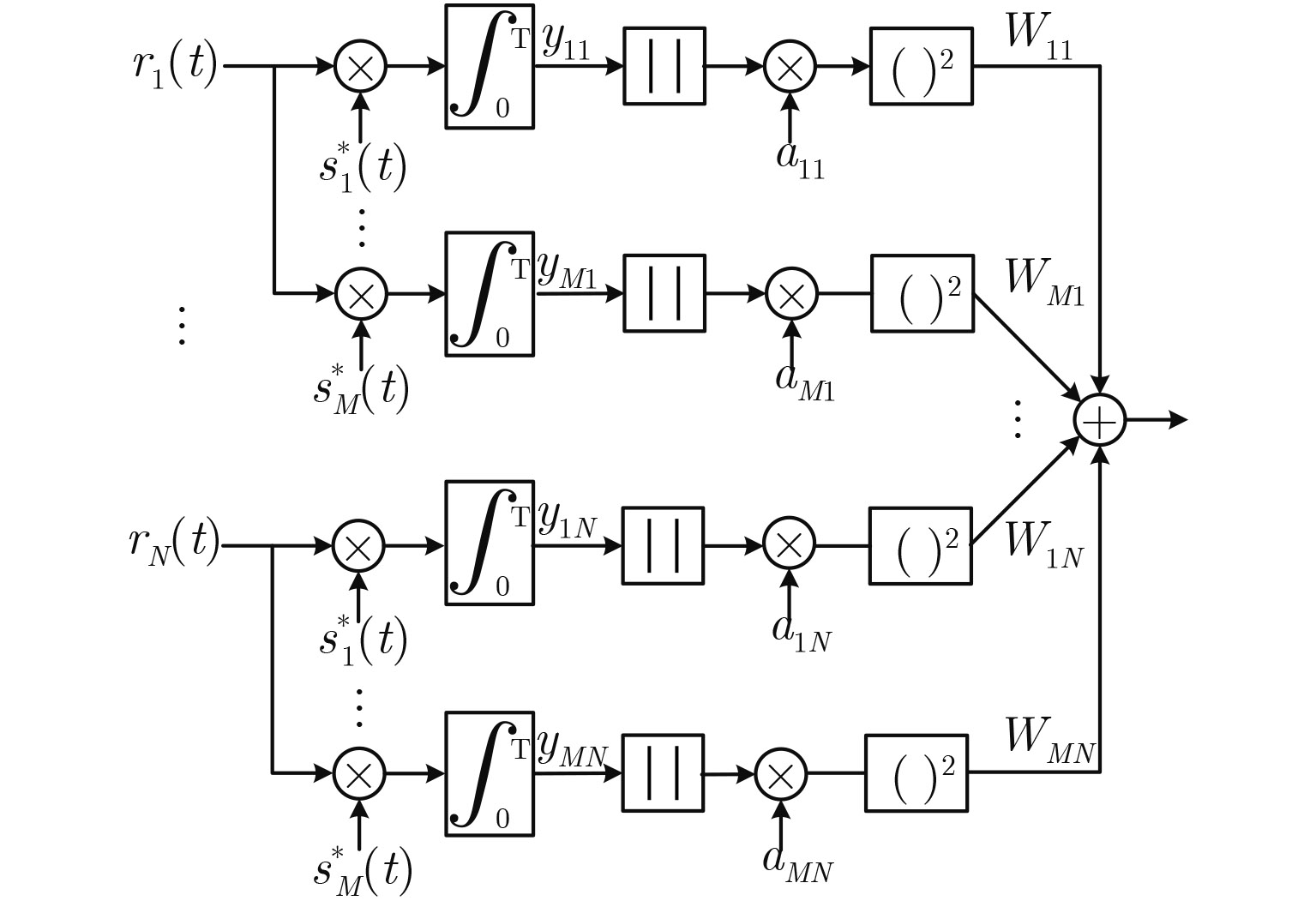
图 2 相位随机MIMO雷达平方律检测器
Figure 2. Square law detector structure of random phase MIMO radar

图 3 幅相随机MIMO雷达平方律检测器
Figure 3. Square law detector structure of random amplitude-phase MIMO radar
-
[1] Fishler E, Haimovich A, and Blum S. MIMO radar: An idea whose time has come[C]. IEEE National Radar Conference, Philadelphia, PA, 2004: 71–78. doi: 10.1007/s11767-009-0029-z?no-access=true [2] Li Jian and Stoica P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114. doi: 10.1109/MSP.2007.904812 [3] Haimovich A, Blum R, and Cimini L. MIMO radar with widelyseparated antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116–129. doi: 10.1109/MSP.2008.4408448 [4] Xu Lu-zhou, Li Jian, and Stoica P. Target detection and parameter estimation for MIMO radar systems[J]. IEEE Transactions on Aerospace & Electronic Systems, 2008, 44(3): 927–939. https://www.infona.pl/resource/bwmeta1.element.ieee-art-000004655353 [5] Fishler E, Haimovich A, and Blum R. Spatial diversity in radars-models and detection performance[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 823–838. doi: 10.1109/TSP.2005.862813 [6] De Maio A and Lops M. Design principles of MIMO radar detectors[J]. IEEE Transactions on Aerospace & Electronic Systems, 2007, 43(3): 886–898. https://www.researchgate.net/publication/3007142_Design_principles_of_MIMO_radar_detectors [7] Chen Chun-yang and Vaidyanathan P P. MIMO radar ambiguity properties and optimization using frequency-hopping waveforms[J]. IEEE Transactions on Signal Processing, 2008, 56(12): 5926–5936. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.156.9450&rep=rep1&type=pdf [8] He Qian and Blum R. Diversity gain for MIMO Neyman-Pearson signal detection[J]. IEEE Transactions on Signal Processing, 2011, 59(3): 869–881. doi: 10.1109/TSP.2010.2094611 [9] He Qian, Lehmann N, and R Blum. MIMO radar moving target detection in homogeneous clutter[J]. IEEE Transactions on Aerospace & Electronic Systems, 2010, 46(3): 1290–1301. https://www.researchgate.net/profile/Rick_Blum/publication/224165956_MIMO_Radar_Moving_Target_Detection_in_Homogeneous_Clutter/links/00b4953c43d5c12f1f000000.pdf?inViewer=true&disableCoverPage=true&origin=publication_detail [10] 宋靖, 张剑云. 分布式全相参雷达相参性能分析[J]. 电子与信息学报, 2015, 37(1): 9–14. http://www.cnki.com.cn/Article/CJFDTotal-DZYX201501002.htmSong Jing and Zhang Jianyun. Coherence performance analysis for distributed aperture coherent radar[J]. Journal of Electronics & Information Technology, 2015, 37(1): 9–14. http://www.cnki.com.cn/Article/CJFDTotal-DZYX201501002.htm [11] 臧会凯, 雷欢, 但晓东. 分布式雷达相参发射原理与性能分析[J]. 电子与信息学报, 2015, 37(8): 1801–1807. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201508004.htmZang Hui-kai, Lei Huan, and Dan Xiao-dong. Theory and performance analysis of coherent transmission for distributed radar[J]. Journal of Electronics & Information Technology, 2015, 37(8): 1801–1807. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201508004.htm [12] 曾涛, 殷丕磊, 杨小鹏. 分布式全相参雷达系统时间与相位同步方案研究[J]. 雷达学报, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104Zeng Tao, Yin Pi-lei, and Yang Xiao-peng. Time and phase synchronization for distributed aperture coherent radar[J]. Journal of Radars, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104 [13] He Qian, Blum R, Godrich H, et al.. Target velocity estimation and antenna placement for MIMO radar with widely separated antennas[J]. IEEE Journal of Selected Topics in Signal Processing, 2010, 4(1): 79–100. doi: 10.1109/JSTSP.2009.2038974 [14] Abramuwitz M and Stegun I. Handbook of Mathematical Functions: with Formulas, Graphs, and Mathematical Tables[M]. Dover Publications, 1968. [15] Thomas A and Arthur A. Detection and Estimation: Theory and Its Application[M]. Prentice Hall Press, 2007. [16] Anthony D. Detection of Signals in Noise[M]. New York: Academic Press, 1971. -

 下载:
下载:


图(5)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

