
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 为有效地从海量、带噪阵列InSAR空间点中检测建筑立面,该文提出一种基于结构先验的渐进式建筑立面检测算法。该文算法首先将初始阵列InSAR空间点投影至地面以生成与建筑立面相应的连通区域,然后通过结构先验的引导逐步在每个连通区域内检测潜在的线段,进而根据线段及其对应的空间点生成相应的建筑立面;在此过程中,当前连通区域对应线段的检测空间根据其相邻连通区域内已检测线段构造,有效保证了整体效率与可靠性。实验结果表明,该文算法可快速从海量、带噪阵列InSAR空间点中检测出较多的可靠建筑立面,较好地克服了传统多模型拟合算法效率低与可靠性差的缺点。Abstract: This study proposes a progressive building facade detection method based on structure priors to effectively detect building facades from massive array InSAR spatial points with noise. First, the proposed method projects the initial array of InSAR three-Dimensional (3D) points on the ground to produce connected regions that correspond to building facades and then progressively detects potential line segments in each connected region under the guidance of structure priors. Furthermore, the proposed method generates building facades according to the detected line segments and their corresponding 3D points. In this process, the line segment detection space of the current connected region is constructed based on line segments detected in its neighboring connected regions, thereby improving the overall efficiency and reliability of the current line segment detection. Experimental results confirm that the proposed method can efficiently produce more reliable building facades from a massive array of InSAR 3D points with noise, overcoming several difficulties (such as low efficiency and inferior reliability) encountered in traditional multi-model fitting methods.
-
Key words:
- Array InSAR point cloud /
- Structure prior /
- Plane fitting /
- 3D modeling
-

图 1 PBFD算法流程(黄: 投影图生成,蓝: 主线段检测,绿: 潜在线段检测)
Figure 1. Flowchart of the PBFD method (yellow: projection map generation, blue: main line segment detection, green: potential line segment detection)
算法1:连通区域间潜在线段检测 步骤1 从集合$\bar{\mathcal{M} }$中选择具有最高优先级的连通区域$ \mathit{c} $。 步骤2 根据集合$ \mathit{N}\left(\mathit{c}\right) $内连通区域相应线段与结构先验生成候选直线。 步骤3 根据式(4)为连通区域$ \mathit{c} $分配最优直线。 步骤4 将连通区域$ \mathit{c} $移入集合$ \mathcal{M} $并转至步骤1。 步骤5 若集合$\bar{\mathcal{M} }$为空则输出集合$ \mathcal{M} $中更新的连通区域及相应的线段。  下载: 导出CSV
下载: 导出CSV
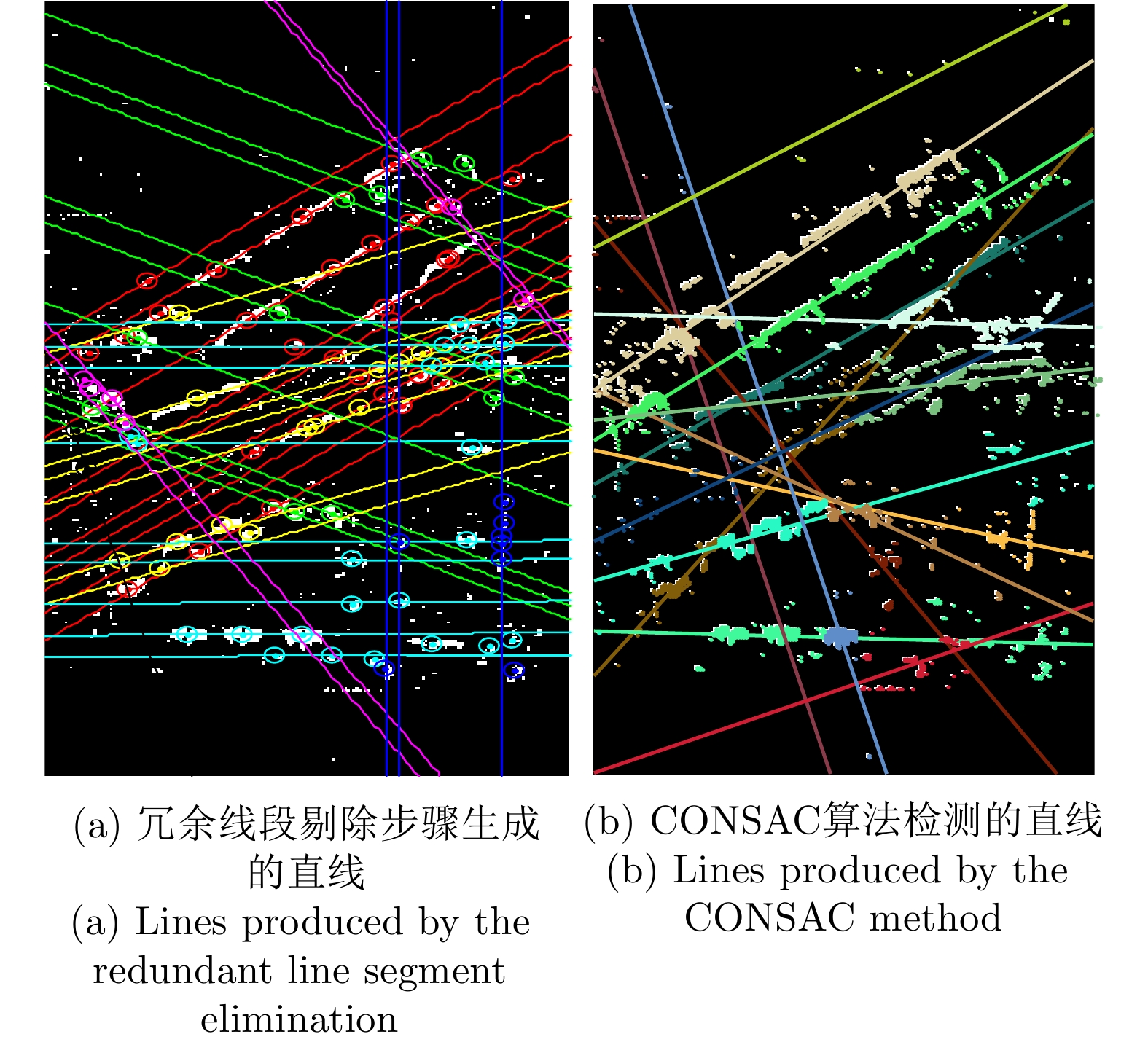
表 2 不同算法的精度
Table 2. Accuracies of different methods
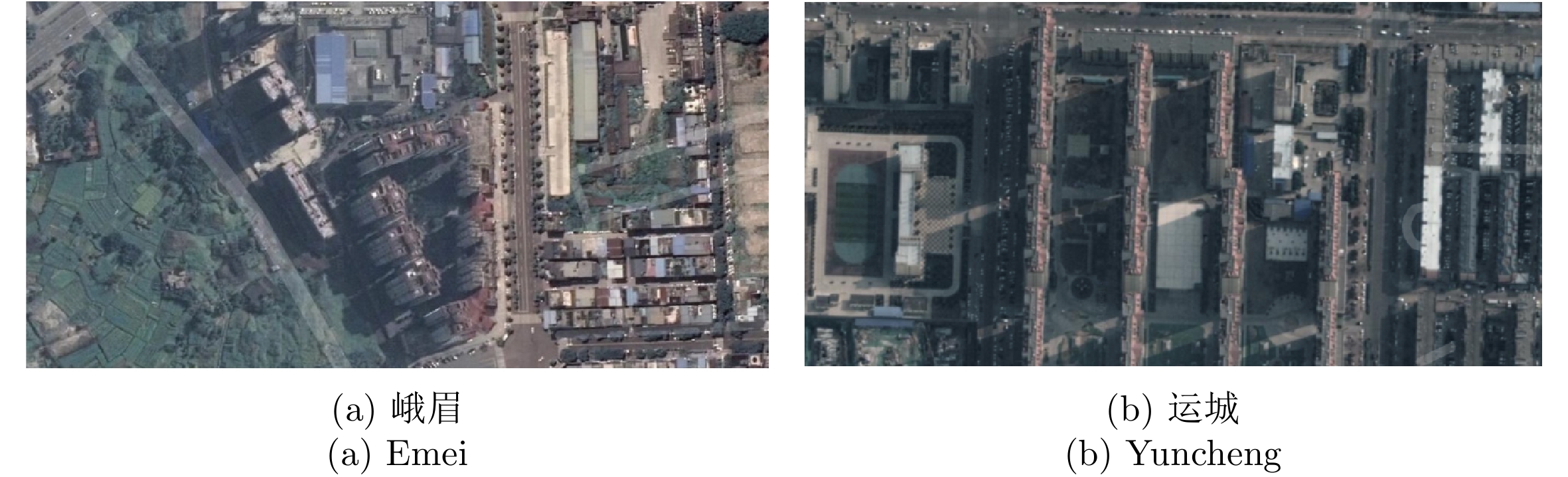
数据集 PBFD CONSAC Stage-I Stage-II Stage-III N-G-L P R F1 N-G-L P R F1 N-G-L P R F1 P R F1 峨眉 33-5-12 1 0.22 0.36 83-7-43 0.94 0.73 0.82 109-7-57 0.90 0.93 0.91 0.79 0.24 0.37 运城 27-1-7 1 0.18 0.31 71-2-25 0.97 0.60 0.74 86-2-34 0.94 0.80 0.86 0.86 0.15 0.26
下载: 导出CSV
表 3 不同算法运行时间(秒)
Table 3. Running time of different methods (s)
数据集 PBFD CONSAC INI Stage-I Stage-II Stage-III LP Total 峨眉 2.1 2.4 3.1 2.5 1.7 11.8 7.3 运城 1.8 3.1 4.3 2.0 1.5 12.7 9.5
下载: 导出CSV
-
[1] JIAO Zekun, DING Chibiao, QIU Xiaolan, et al. Urban 3D imaging using airborne TomoSAR: Contextual information-based approach in the statistical way[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 170: 127–141. doi: 10.1016/j.isprsjprs.2020.10.013 [2] 曾涛, 温育涵, 王岩, 等. 合成孔径雷达参数化成像技术进展[J]. 雷达学报, 2021, 10(3): 327–341. doi: 10.12000/JR21004ZENG Tao, WEN Yuhan, WANG Yan, et al. Research progress on synthetic aperture radar parametric imaging methods[J]. Journal of Radars, 2021, 10(3): 327–341. doi: 10.12000/JR21004 [3] 丁赤飚, 仇晓兰, 徐丰, 等. 合成孔径雷达三维成像—从层析、阵列到微波视觉[J]. 雷达学报, 2019, 8(6): 693–709. doi: 10.12000/JR19090DING Chibiao, QIU Xiaolan, XU Feng, et al. Synthetic aperture radar three-dimensional imaging—from TomoSAR and array InSAR to microwave vision[J]. Journal of Radars, 2019, 8(6): 693–709. doi: 10.12000/JR19090 [4] WANG Yifan, WU Shihao, HUANG Hui, et al. Patch-based progressive 3D point set upsampling[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 5951–5960. [5] WANG Yuanyuan and ZHU Xiaoxiang. Automatic feature-based geometric fusion of multiview TomoSAR point clouds in urban area[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(3): 953–965. doi: 10.1109/JSTARS.2014.2361430 [6] RAMBOUR C, DENIS L, TUPIN F, et al. Urban surface reconstruction in SAR tomography by graph-cuts[J]. Computer Vision and Image Understanding, 2019, 188: 102791. doi: 10.1016/j.cviu.2019.07.011 [7] BARÁTH D and MATAS J. Progressive-X: Efficient, anytime, multi-model fitting algorithm[C]. 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Korea (South), 2019: 3779–3787. [8] KLUGER F, BRACHMANN E, ACKERMANN H, et al. CONSAC: Robust multi-model fitting by conditional sample consensus[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 4633–4642. [9] WANG Wei and GAO Wei. Efficient multi-plane extraction from massive 3D points for modeling large-scale urban scenes[J]. The Visual Computer, 2019, 35(5): 625–638. doi: 10.1007/s00371-018-1492-z [10] FISCHLER M A and BOLLES R C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[M]. FISCHLER M A and FIRSCHEIN O. Readings in Computer Vision. Los Altos, USA: Morgan Kaufmann, 1987: 726–740. [11] ZULIANI M, KENNEY C S, and MANJUNATH B S. The multiRANSAC algorithm and its application to detect planar homographies[C]. IEEE International Conference on Image Processing 2005, Genova, Italy, 2005: III-153. [12] TOLDO R and FUSIELLO A. Robust multiple structures estimation with j-linkage[C]. The 10th European Conference on Computer Vision, Marseille, France, 2008: 537–547. [13] MAGRI L and FUSIELLO A. Robust multiple model fitting with preference analysis and low-rank approximation[C]. British Machine Vision Conference, Swansea, UK, 2015: 20.1–20.12. [14] MAGRI L and FUSIELLO A. T-linkage: A continuous relaxation of j-linkage for multi-model fitting[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, USA, 2014: 3954–3961. [15] MAGRI L and FUSIELLO A. Fitting multiple heterogeneous models by multi-class cascaded t-linkage[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 7452–7460. [16] ISACK H and BOYKOV Y. Energy-based geometric multi-model fitting[J]. International Journal of Computer Vision, 2012, 97(2): 123–147. doi: 10.1007/s11263-011-0474-7 [17] PHAM T T, CHIN T J, YU Jin, et al. The random cluster model for robust geometric fitting[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(8): 1658–1671. doi: 10.1109/TPAMI.2013.2296310 [18] CHIN T J, YU Jin, and SUTER D. Accelerated hypothesis generation for multistructure data via preference analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(4): 625–638. doi: 10.1109/TPAMI.2011.169 [19] BARATH D and MATAS J. Multi-class model fitting by energy minimization and mode-seeking[C]. The 15th European Conference on Computer Vision, Munich, Germany, 2018: 229–245. [20] BARATH D and MATAS J. Graph-Cut RANSAC[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Utah, USA, 2018: 6733–6741. doi: 10.1109/CVPR.2018.00704. [21] BRACHMANN E and ROTHER C. Neural-guided RANSAC: Learning where to sample model hypotheses[C]. 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Korea (South), 2019: 4321–4330. [22] ZHU Xiaoxiang and SHAHZAD M. Façade reconstruction using multi-view spaceborne TomoSAR point clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(6): 3541–3552. doi: 10.1109/TGRS.2013.2273619 [23] SHAHZAD M and ZHU Xiaoxiang. Robust reconstruction of building facades for large areas using spaceborne TomoSAR point clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(2): 752–769. doi: 10.1109/TGRS.2014.2327391 [24] BALLARD D H. Generalizing the Hough transform to detect arbitrary shapes[J]. Pattern Recognition, 1981, 13(2): 111–122. doi: 10.1016/0031-3203(81)90009-1 [25] VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: A fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4): 722–732. doi: 10.1109/TPAMI.2008.300 [26] HUTTENLOCHER D P, KLANDERMAN G A, and RUCKLIDGE W J. Comparing images using the Hausdorff distance[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1993, 15(9): 850–863. doi: 10.1109/34.232073 [27] 仇晓兰, 焦泽坤, 彭凌霄, 等. SARMV3D-1.0: SAR微波视觉三维成像数据集[J]. 雷达学报, 2021, 10(4): 485–498. doi: 10.12000/JR21112QIU Xiaolan, JIAO Zekun, PENG Lingxiao, et al. SARMV3D-1.0: Synthetic aperture radar microwave vision 3D imaging dataset[J]. Journal of Radars, 2021, 10(4): 485–498. doi: 10.12000/JR21112 -







图(12) / 表(4)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

