
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Joint Selection of Transmitters and Receivers in Distributed Multi-input Multi-output Radar Network for Multiple Targets Tracking
-
摘要: 在分布式MIMO雷达网络场景下,由于MIMO雷达网络的时间能量资源限制,在同一时间下对某一目标,只允许采用有限数量的发射站和接收站来对其进行监视跟踪。因此需要寻求一种合理有效的方法在满足雷达网络发射站接收站数量约束的前提下尽可能高的提高对目标的跟踪性能。该文利用后验克拉美罗下界(PCRLB)作为性能指标,优化多目标跟踪情况下性能最差的目标构建为一个布尔规划问题(BP)。在将原问题松弛为半正定规划问题后(SDP)利用分块坐标下降迭代法取得联合选择的近似最优解。通过仿真实验,验证了该文提出的方法能够根据目标场景动态的规划选择所需的发射站和接收站。相比固定非动态选择拥有更好的性能。并且在拥有更小计算量的前提下获得了近似于穷举搜索的性能。Abstract: Only a subset of transmitters and receivers in a distributed Multi-Input Multi-Output (MIMO) radar network is allowed to actively track a target at a particular instance due to the limited time and energy resource of a MIMO radar network. It is therefore desirable to obtain an efficient method to overcome the resource constraints while optimizing the tracking performance. In this study, posterior Cramer-Rao lower bound is used as the performance metric and the selection problem is formulated as a Boolean programming problem aiming at optimizing the worst tracking performance of multiple targets. It is later relaxed to a semidefinite programming and solved by the block coordinate descend method. Numerical results show that proposed method superior to the fixed selection method. In addition, with less computation complexity, the proposed method obtains nearly equivalent performance compared with exhaustive search method.
-

图 1 发射站接收站实时选择情况
Figure 1. Selection results of transmitters and receivers varied with time

图 2 文中所提优化方法与固定选择方法的性能对比
Figure 2. Performance of proposed method and fixed selection method

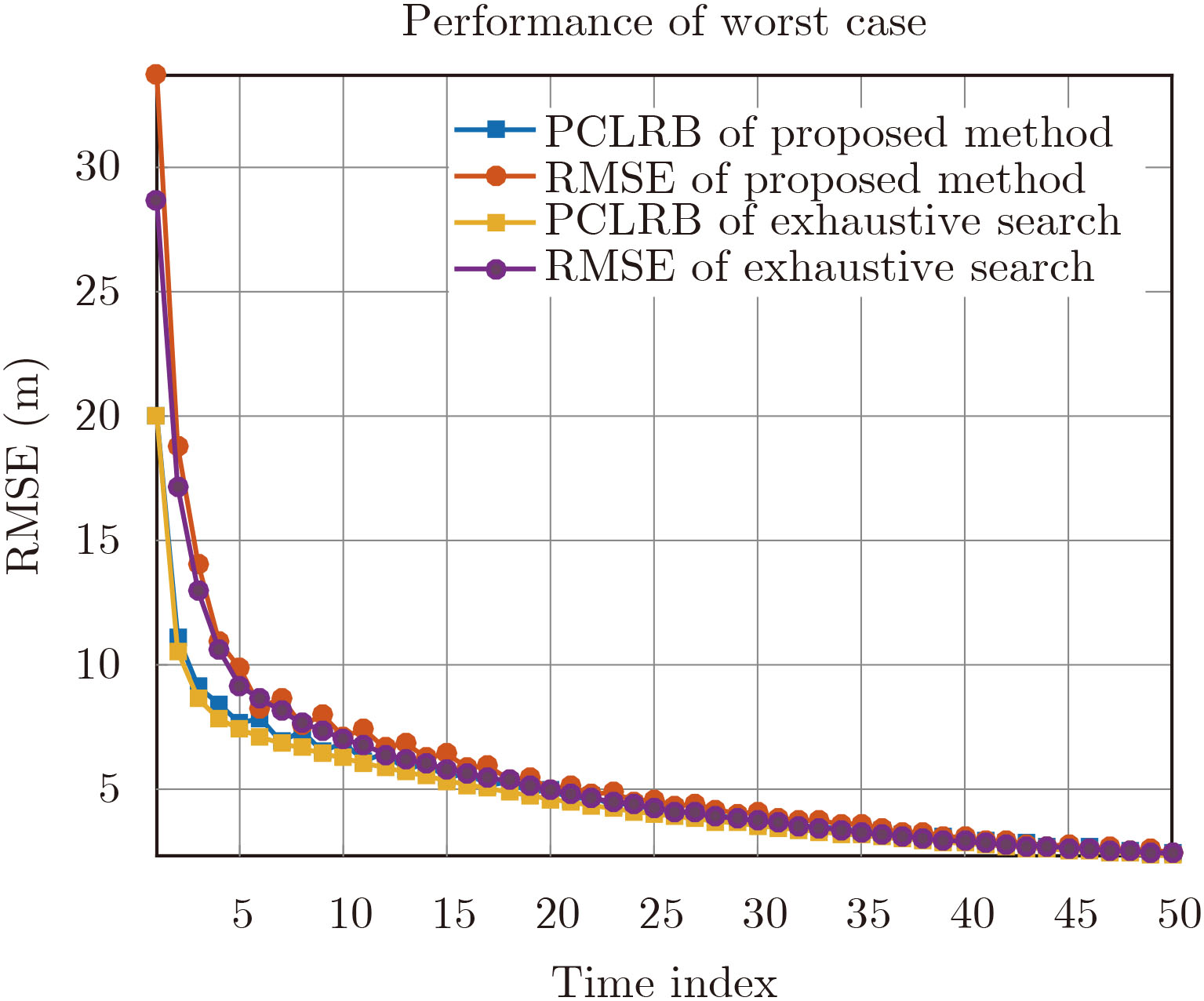
图 3 文中所提优化方法与穷举搜索选择方法的性能对比
Figure 3. Performance of proposed method and exhaustive search method

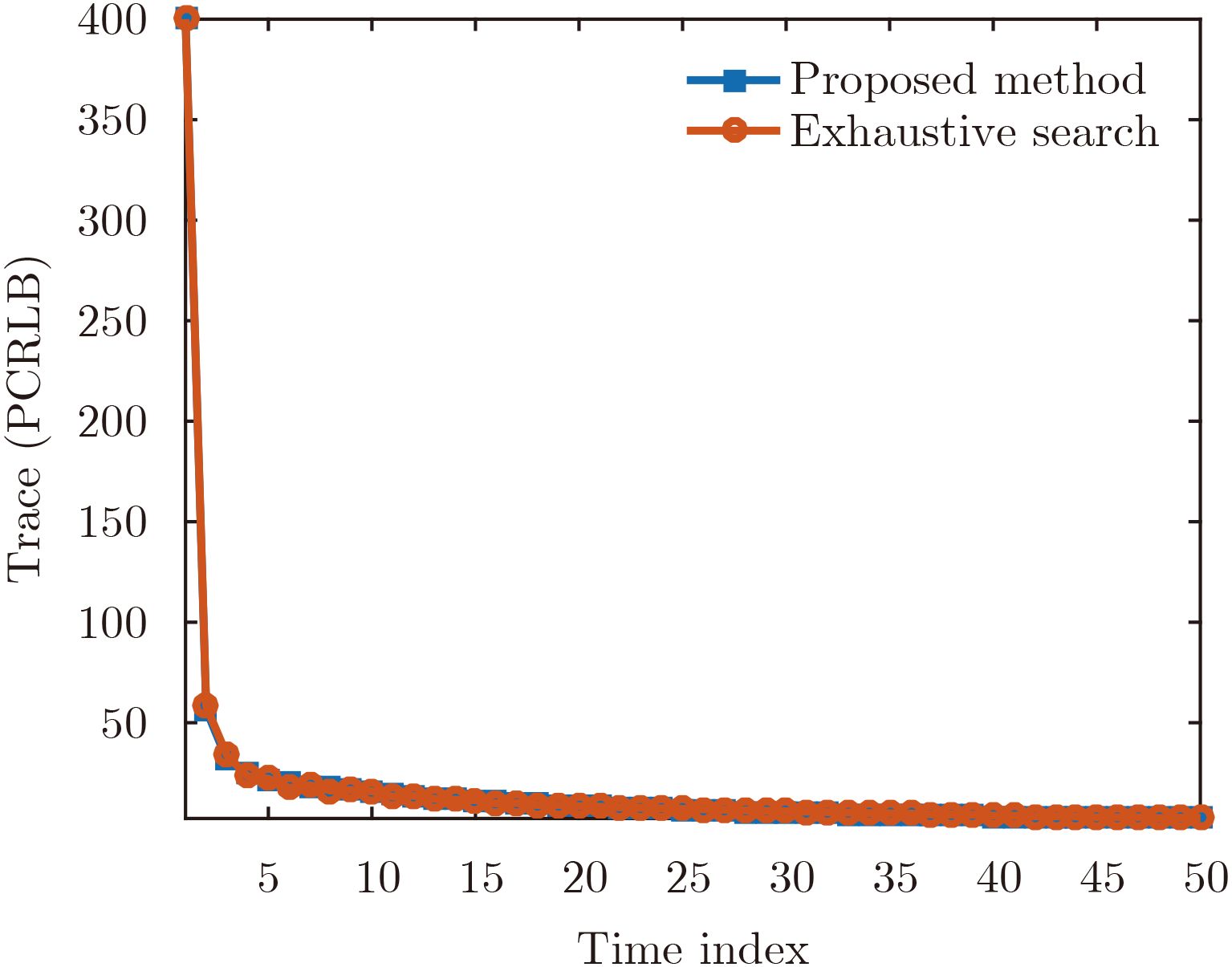
图 4 文中所提优化方法的平均PCRLB与穷举搜索选择方法对比
Figure 4. Average performance of proposed method and exhaustive search method
-
[1] Li J and Stoica P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114. doi: 10.1109/MSP.2007.904812 [2] Haimovich A M, Blum R S, and Cimini L J. MIMO radar with widely separated antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116–129. doi: 10.1109/MSP.2008.4408448 [3] Joshi S and Boyd S. Sensor selection via convex optimization[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 451–462. doi: 10.1109/TSP.2008.2007095 [4] Shen X, Liu S, and Varshney P K. Sensor selection for nonlinear systems in large sensor networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2664–2678. http://adsabs.harvard.edu/abs/2014ITAES..50.2664S [5] Masazade E, Fardad M, and Varshney P K. Sparsity-Promoting extended Kalman filtering for target tracking in wireless sensor networks[J]. IEEE Signal Processing Letters, 2012, 19(19): 845–848. https://www.researchgate.net/publication/258655744_Sparsity-Promoting_Extended_Kalman_Filtering_for_Target_Tracking_in_Wireless_Sensor_Networks [6] Godrich H, Petropulu A P, and Poor H V. Sensor selection in distributed multiple-radar architectures for localization: A knapsack problem formulation[J]. IEEE Transactions on Signal Processing, 2012, 60(1): 247–260. doi: 10.1109/TSP.2011.2170170 [7] Ma Botao, Chen Haowen, Sun Bin, et al.. A joint scheme of antenna selection and power allocation for localization in MIMO radar sensor networks[C]. IEEE International Conference on Signal Processing, Hangzhou, China, 2014: 2226–2229. http://ieeexplore.ieee.org/document/7015390/ [8] Glass J D and Smith L D. MIMO radar resource allocation using posterior Cramér-Rao lower bounds[C]. IEEE Aerospace Conference, Big Sky, MT, USA, 2011: 1–9. http://dl.acm.org/citation.cfm?id=2053918.2054178 [9] Xie M, Yi W, Kirubajaran T, et al.. Receive-beam allocation for multiple target tracking with distributed MIMO radar systems[C]. IEEE Radar Conference, Philadelphia, PA, USA, 2016. DOI: 10.1109/RADAR. 2016.7485153. [10] Godrich H, Tajer A, and Poor H.V. Distributed target tracking in multiple widely separated radar architectures[C]. IEEE 7th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hoboken, NJ, USA, 2012: 153–156. DOI: 10.1109/SAM. 2012.6250453. [11] Trees H L V. Detection, Estimation, and Modulation Theory—Part I[M]. Publishing House of Electronics Industry, Beijing, China, 2003: 131–143. [12] Tichavsky P, Muravchik C H, and Nehorai A. Posterior Cramer-Rao bounds for discrete-time nonlinear filtering[J]. IEEE Transactions on Signal Processing, 1998, 46(5): 1386–1396. doi: 10.1109/78.668800 [13] Boyd S and Vandenberghe L. Convex Optimization[M]. Cambridge University Press, Cambridge, UK, 2004: 55–60. [14] Arulampalam M S, Maskell S, Gordon N, et al.. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174–188. doi: 10.1109/78.978374 [15] Nemirovski A. Interior point polynomial time methods in convex programming[OL]. . 2012. [16] Razaviyayn M, Hong M, and Luo Z Q. A unified convergence analysis of block successive minimization methods for nonsmooth optimization[J]. SIAM Journal on Optimization, 2013, 23(2): 1126–1153. doi: 10.1137/120891009 -

 下载:
下载:



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

