
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
CS-SAR Imaging Method Based on Inverse Omega-K Algorithm
DOI: 10.12000/JR16027 cstr: 32380.14.JR16027
-
摘要: 很多文献已经证明压缩感知应用在SAR成像中的有效性.现有的CS-SAR成像算法非常耗时, 尤其是对于高分辨率的图像来说更甚.该文针对稀疏场景提出了一种基于omega-K算法, 精确且高效的CS-SAR成像算法——CS-OKA算法.我们首先推导出了omega-K算法的逆算子, 可不通过发射信号和场景的卷积来直接得到回波信号.在此基础上我们将SAR成像问题建立为一个稀疏优化问题, 并用迭代阈值的方法来求解.仿真结果表明, 当场景稀疏时该文的方法可以在远低于Nyquist采样率的前提下有效地恢复出原始场景, 并且时耗和存储量都显著降低.Abstract: Compressed Sensing (CS) has been proved to be effective in Synthetic Aperture Radar (SAR) imaging. Previous CS-SAR imaging algorithms are very time consuming, especially for producing high-resolution images. In this study, we propose a new CS-SAR imaging method based on the well-known omega-K algorithm, which is precise and convenient to use in SAR imaging. First, we derive an inverse omega-K algorithm to directly obtain echoes without any convolution between the transmitted signal and scene. Then, we formulate the SAR imaging problem into a sparse regularization problem and solve it using an iterative thresholding algorithm. With our derived inverse omega-K algorithm, we can save significant amounts of computation time and computer memory usage. Simulation results show that the proposed method can effectively recover SAR images with much less data than that required by the Nyquist rate.
-

Figure 1. Reconstruction results with full sampled data but different SNRs. The left column is recovered by omega-K algorithm, and the right column is recovered by CS-OKA. From top to bottom, SNRs are 20, 10, and 5 dB, respectively

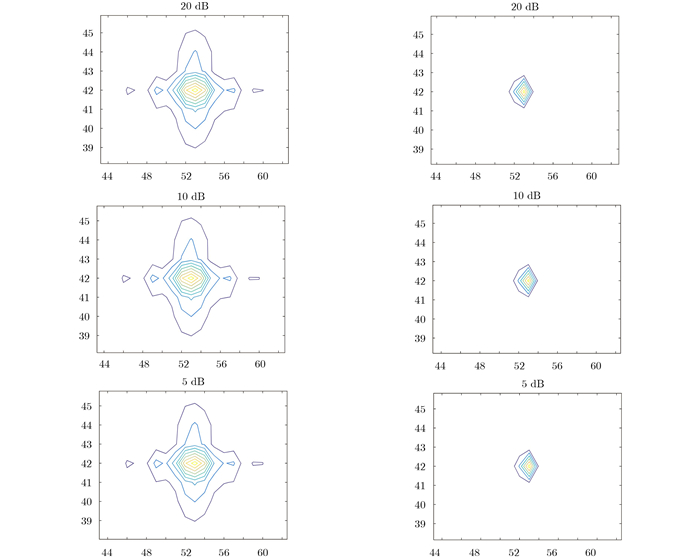
Figure 2. Contours of magnitude of lower left target in Fig. 1. The left column is recovered by omega-K algorithm, and the right column is recovered by CS-OKA. From top to bottom, SNRs are 20, 10, and 5 dB, respectively

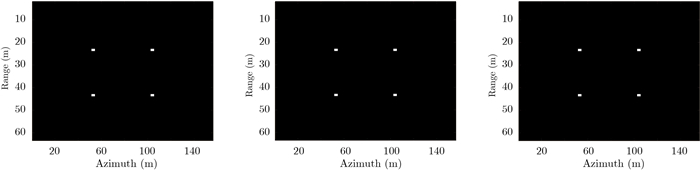
Figure 3. Reconstruction results with 50% samples in both range and azimuth. From left to right, SNRs are 20, 10, and 5 dB, respectively

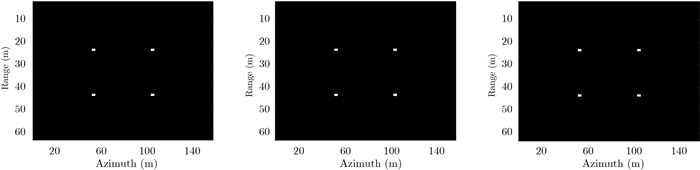
Figure 4. Reconstruction results with 10% samples in both range and azimuth. From left to right, SNRs are 20, 10, and 5 dB, respectively
Algorithm 1: Iterative thresholding algorithm for proposed CS-SAR imaging Input: SAR raw echoes SS, omega-K algorithm M and inverse omega-K algorithm T, sampling operator Θτ and Θη Initial: G(0), λ, μ, and max iteration Imax 1: for i = 1 to Imax do 2: residue: $ {{\mathit{\boldsymbol{R}}}^{\left( i-1 \right)}}={{\mathit{\boldsymbol{S}}}_{S}}-{\mathit{\Theta }_\tau }T\left( {{\mathit{\boldsymbol{G}}}^{\left( i-1 \right)}} \right){{\mathit{\Theta }}_{\eta }}$ 3: omega-K on residue: $\Delta {{\mathit{\boldsymbol{G}}}^{\left( i-1 \right)}}=M\left( \mathit{\Theta } _{\tau }^{\rm{T}}{{\mathit{\boldsymbol{R}}}^{\left( i-1 \right)}}\mathit{\Theta } _{\eta }^{\rm{T}} \right)$ 4: Thresholding: ${{\mathit{\boldsymbol{G}}}^{\left( i \right)}}={{E}_{1, \lambda \mu }}\left( {{\mathit{\boldsymbol{G}}}^{\left( i-1 \right)}}+\mu \Delta {{\mathit{\boldsymbol{G}}}^{\left( i-1 \right)}} \right)$ 5: end for Output: The recovery image G*=G(i)  下载: 导出CSV
下载: 导出CSV
Table 1. Parameters used in the simulation
Parameter Value Pulse duration (μs) 1.33 Bandwidth in range (MHz) 150 Carrier frequency (MHz) 600 Sampling rate (MHz) 225 Slant range of scene center (m) 1200 Length of synthetic aperture (m) 300 Pulse repeat frequency (Hz) 150 000 000 Radar velocity in azimuth (m/s) 150
下载: 导出CSV
-
[1] Cumming I G and Wong F H. Digital Processing of Synthetic Aperture Radar Data:Algorithms and Implementation[M]. Norwood, MA, USA, Artech House, 2004:225-367. [2] Donoho D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4):1289-1306. doi: 10.1109/TIT.2006.871582 [3] Baraniuk R G. Compressive sensing[J]. IEEE Signal Processing Magazine, 2007, 24(4):118-120. doi: 10.1109/MSP.2007.4286571 [4] Candes E J, Romberg J K, and Tao T. Stable signal recovery from incomplete and inaccurate measurements[J]. Communications on Pure and Applied Mathematics, 2006, 59(8):1207-1223. doi: 10.1002/(ISSN)1097-0312 [5] Davenport M A, Duarte M F, Eldar Y C, et al.. Compressed Sensing:Theory and Applications[M]. Cambridge, U.K., Cambridge University Press, 2012:1-55. [6] 吴一戎, 洪文, 张冰尘, 等.稀疏微波成像研究进展[J].雷达学报, 2014, 3(4):383-395. http://radars.ie.ac.cn/CN/abstract/abstract196.shtmlWu Yi-rong, Hong Wen, Zhang Bing-chen, et al.. Current developments of sparse microwave imaging[J]. Journal of Radars, 2014, 3(4):383-395. http://radars.ie.ac.cn/CN/abstract/abstract196.shtml [7] Baraniuk R and Steeghs P. Compressive radar imaging[C]. IEEE Radar Conference, Waltham, MA, USA, 2007: 128-133. [8] Alonso Mariví Tello, López-Dekker Paco, and Mallorquí Jordi J. A novel strategy for radar imaging based on compressive sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(12):4285-4295. doi: 10.1109/TGRS.2010.2051231 [9] Yang Jungang, Thompson J, Huang Xiaotao, et al.. Segmented reconstruction for compressed sensing SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(7):4214-4225. doi: 10.1109/TGRS.2012.2227060 [10] Fang Jian, Xu Zongben, Zhang Bingchen, et al.. Fast compressed sensing SAR imaging based on approximated observation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(1):352-363. doi: 10.1109/JSTARS.2013.2263309 [11] Dong Xiao and Zhang Yunhua. A novel compressive sensing algorithm for SAR imaging[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(2):708-720. doi: 10.1109/JSTARS.2013.2291578 [12] Bu Hongxia, Tao Ran, Bai Xia, et al.. A novel SAR imaging algorithm based on compressed sensing[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(5):1003-1007. doi: 10.1109/LGRS.2014.2372319 [13] Yang Dong, Liao Guisheng, Zhu Shengqi, et al.. SAR imaging with undersampled data via matrix completion[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(9):1539-1543. doi: 10.1109/LGRS.2014.2300170 [14] Dong Xiao and Zhang Yunhua. A MAP approach for 1-bit compressive sensing in synthetic aperture radar imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(6):1237-1241. doi: 10.1109/LGRS.2015.2390623 [15] Zhang Siqian, Zhu Yutao, Dong Ganggang, et al.. Truncated SVD-based compressive sensing for downward-looking three-dimensional SAR imaging with uniform nonuniform linear array[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(9):1853-1857. doi: 10.1109/LGRS.2015.2431254 [16] Bi Hui, Jiang Chenglong, Zhang Bingchen, et al.. Radar change imaging with undersampled data based on matrix completion and Bayesian compressive sensing[J].IEEE Geoscience and Remote Sensing Letters, 2015, 12(7):1546-1550. doi: 10.1109/LGRS.2015.2412677 [17] Khwaja Ahmed Shaharyar, Ferro-Famil Laurent, and Pottier Eric. Efficient SAR raw data generation for anisotropic urban scenes based on inverse processing[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(4):757-761. doi: 10.1109/LGRS.2009.2024559 [18] Blumensath T and Davies M E. Iterative hard thresholding for compressed sensing[J]. Applied and Computational Harmonic Analysis, 2009, 27(3):265-274. doi: 10.1016/j.acha.2009.04.002 [19] Daubechies Ingrid, Defrise Michel, and De Mol Christine. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint[J]. Communications on Pure and Applied Mathematics, 2004, 57(11):1413-1457. doi: 10.1002/(ISSN)1097-0312 -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

