
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Distributed MIMO-ISAR Sub-image Fusion Method
-
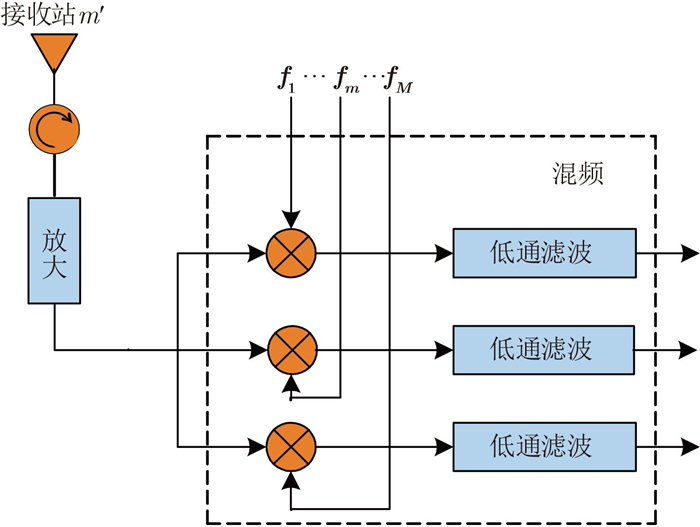
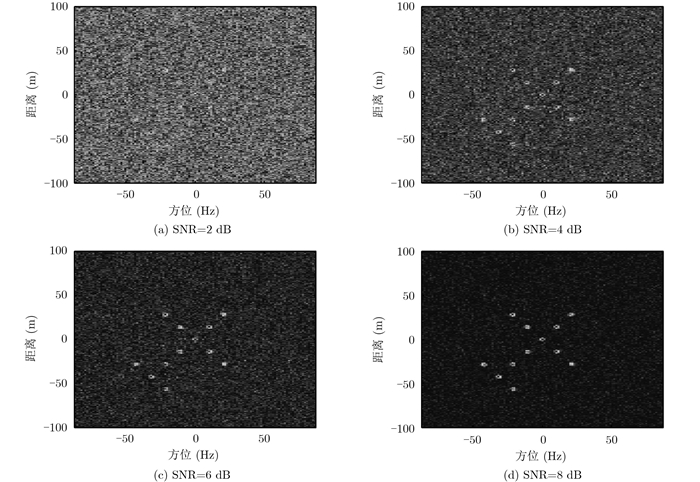
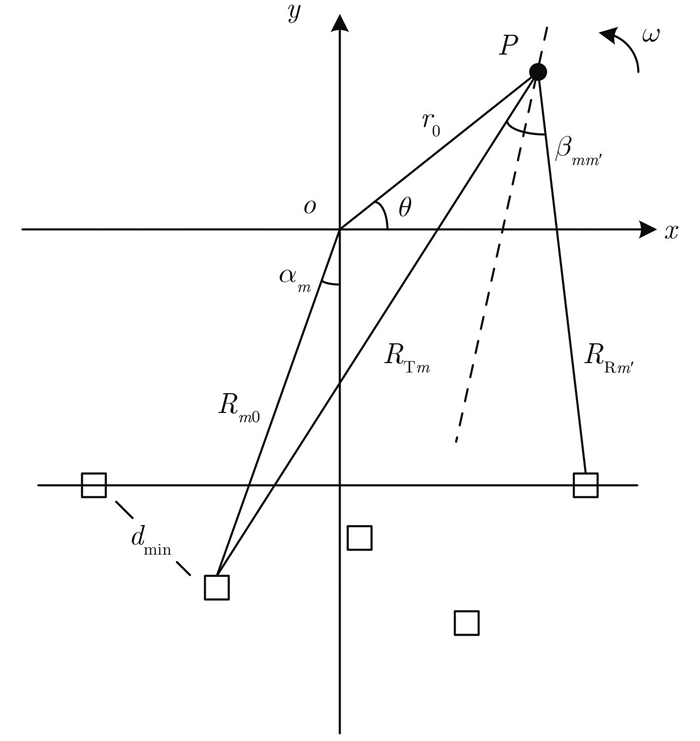
摘要: 高机动目标雷达截面积(Radar Cross Section,RCS)的快速起伏,容易对常规单站逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)成像性能的稳定性造成影响。针对这一问题,该文提出了一种基于频率分集分布式多输入多输出逆合成孔径雷达(Multiple Input Multiple Output-Inverse Synthetic Aperture Radar,MIMO-ISAR)子图像融合的成像方法。首先建立了分布式MIMO-ISAR不同通道所获取的2维ISAR图像解析表达式,导出了距离和方位畸变因子,通过对不同通道所获取ISAR图像畸变的补偿,实现了频率分集分布式MIMOISAR融合成像。仿真实验结果证实了提出方法的有效性。Abstract: The fast fluctuation associated with maneuvering a target's radar cross-section often affects the imaging performance stability of traditional monostatic Inverse Synthetic Aperture Radar (ISAR). To address this problem, in this study, we propose an imaging method based on the fusion of sub-images of frequencydiversity-distributed multiple Input-Multiple Output-Inverse Synthetic Aperture Radar (MIMO-ISAR). First, we establish the analytic expression of a two-dimensional ISAR sub-image acquired by different channels of distributed MIMO-ISAR. Then, we derive the distance and azimuth distortion factors of the image acquired by the different channels. By compensating for the distortion of the ISAR image, we ultimately realize distributed MIMO-ISAR fusion imaging. Simulations verify the validity of this imaging method using distributed MIMOISAR.
-
[1] Duan H P, Zhang L Z, and Fang J. Pattern-coupled sparse Bayesian learning for inverse synthetic aperture radar imaging[J]. IEEE Signal Processing Letters, 2015, 22(11):1995-1999. doi: 10.1109/LSP.2015.2452412 [2] 保铮, 邢孟道, 王彤.雷达成像技术[M].北京:电子工业出版社, 2005:229-276.Bao Z, Xing M D, and Wang T. Radar Imaging Technology[M]. Beijing:Publishing House of Electronics Industry, 2005:229-276. [3] Xu J, Dai X Z, Xia X G, et al.. Optimizations of multisite radar system with MIMO radars for target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4):2329-2343. doi: 10.1109/TAES.2011.6034636 [4] 张亚标, 朱振波, 汤子跃, 等.双站逆合成孔径雷达成像理论研究[J].电子与信息学报, 2006, 28(6):969-972. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200606003.htmZhang Y B, Zhu Z B, Tang Z Y, et al.. Bistatic inverse synthetic aperture radar image formation[J]. Journal of Electronics & Information Technology, 2006, 28(6):969-972. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200606003.htm [5] Palmer J, Homer J, Longstaff I D, et al.. ISAR imaging using an emulated multistatic radar system[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1464-1472. doi: 10.1109/TAES.2005.1561897 [6] Fishler E, Haimovich A, Blum R, et al.. MIMO radar:an idea whose time has come[C]. IEEE Radar Conference, 2004:71-78. [7] Fishler E, Haimovich A, Blum R, et al.. Spatial diversity in radars-models and detection performance[J]. IEEE Transactions on Signal Processing, 2006, 54(3):823-838. doi: 10.1109/TSP.2005.862813 [8] Wang D W, Ma X Y, and Su Y. Two-dimensional imaging via a narrow-band MIMO radar system with two perpendicular linear arrays[J]. IEEE Transactions on Image Processing, 2010, 19(5):1269-1279. doi: 10.1109/TIP.2009.2039374 [9] Pastina D, Santi F, and Bucciarelli M. MIMO distributed imaging of rotating targets for improved 2-D resolution[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(1):190-194. doi: 10.1109/LGRS.2014.2331754 [10] 朱宇涛, 郁文贤, 粟毅.一种基于MIMO技术的ISAR成像方法[J].电子学报, 2009, 37(9):1885-1894. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200909002.htmZhu Y T, YU W X, and Su Y. An ISAR imaging method based on MIMO technique[J]. Acta Electronica Sinica, 2009, 37(9):1885-1894. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200909002.htm [11] Ma C Z, Yeo T S, Tan C S, et al.. Three-dimensional imaging using colocated MIMO radar and ISAR technique[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(8):3189-3201. doi: 10.1109/TGRS.2011.2178607 [12] 陈刚, 顾红, 苏卫民, 等. MIMO-ISAR匀加速旋转目标运动参数估计及性能分析[J].电子与信息学报, 2014, 36(8):1919-1925. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201408024.htmChen G, Gu H, Su W M, et al.. Motion parameter estimation and performance analysis for constant accelerating rotating target in MIMO-ISAR imaging[J]. Journal of Electronics & Information Technology, 2014, 36(8):1919-1925. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201408024.htm [13] 徐浩, 尹治平, 刘畅畅, 等.基于压缩感知的稀疏无源雷达成像[J].系统工程与电子技术, 2011, 33(12):2623-2630. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201112013.htmXu H, Yin Z P, Liu C C, et al.. Sparse passive radar imaging based on compressive sensing[J]. Systems Engineering and Electronics, 2011, 33(12):2623-2630. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201112013.htm [14] 柴守刚. 运动目标分布式雷达成像技术研究[D]. [博士论文], 中国科学技术大学, 2014: 67-91.Chai S G. Research on distributed radar imaging of moving target[D].[Ph.D. dissertation], University of Science and Technology of China, 2014:67-91. [15] Wang W Q. Space-time coding MIMO-OFDM SAR for high-resolution imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(8):3094-3104. doi: 10.1109/TGRS.2011.2116030 [16] 王文钦, 程胜娟, 邵怀宗.基于稀疏矩阵和相关函数联合优化的MIMO-OFDM线性调频波形复用设计与实现方法[J].雷达学报, 2015, 4(1):1-10. http://radars.ie.ac.cn/CN/abstract/abstract237.shtmlWang W Q, Cheng S J, and Shao H Z. MIMO-OFDM chirp waveform diversity design and implementation based on sparse matrix and correlation optimization[J]. Journal of Radars, 2015, 4(1):1-10. http://radars.ie.ac.cn/CN/abstract/abstract237.shtml [17] 章毓晋.图像工程 (上册)[M].北京:清华大学出版社, 2013:52-78.Zhang Y J. Imaging Engineering (61179015)[M]. Beijing:Tsinghua University Press, 2013:52-78. Victoria S. American Missile Defense[M]. California:United States of America, 2010:44-78. -

 下载:
下载:

图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

