
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Method for Interrupted-Sampling Repeater Jamming Identification and Suppression Based on Differential Features(in English)
-
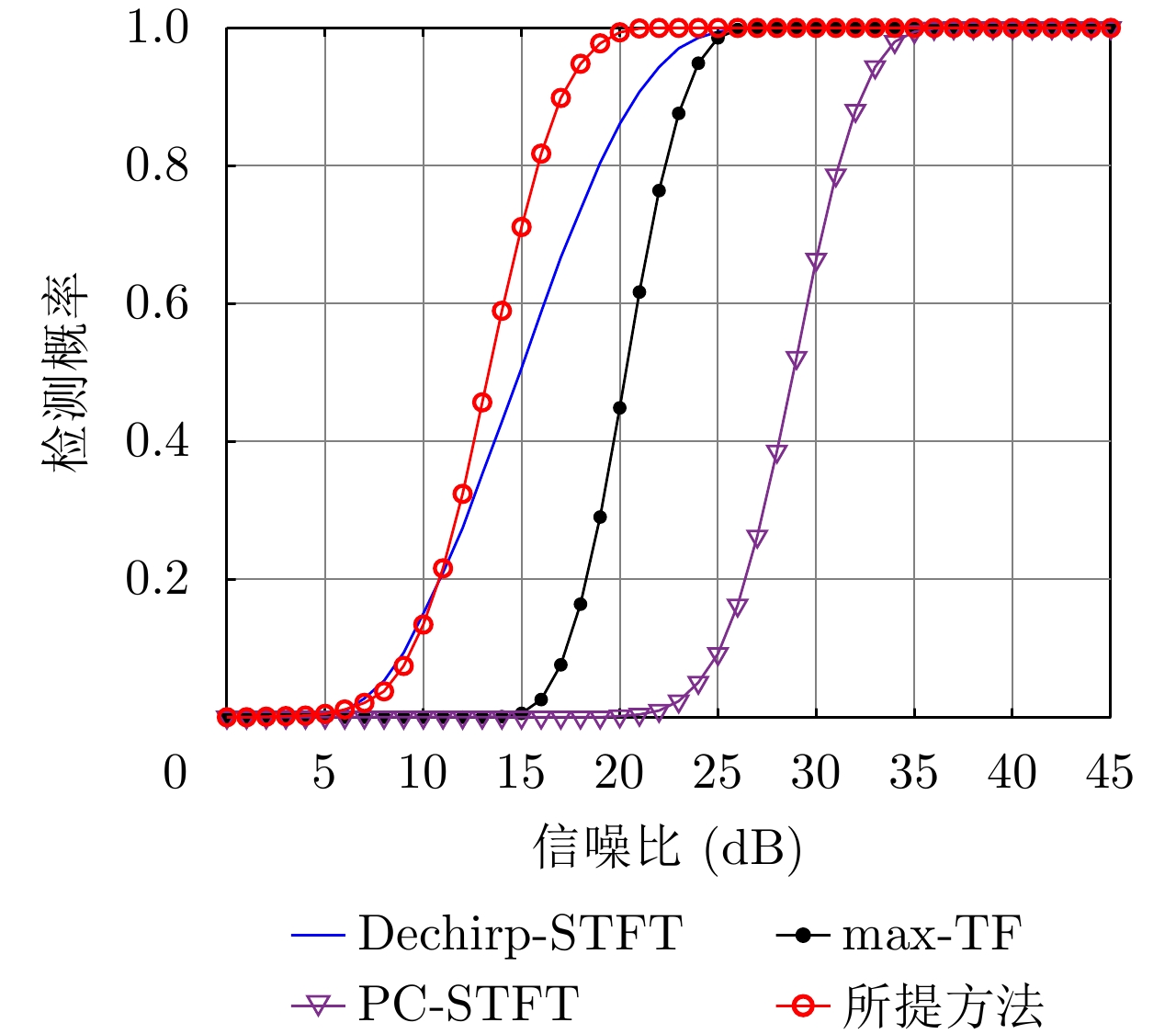
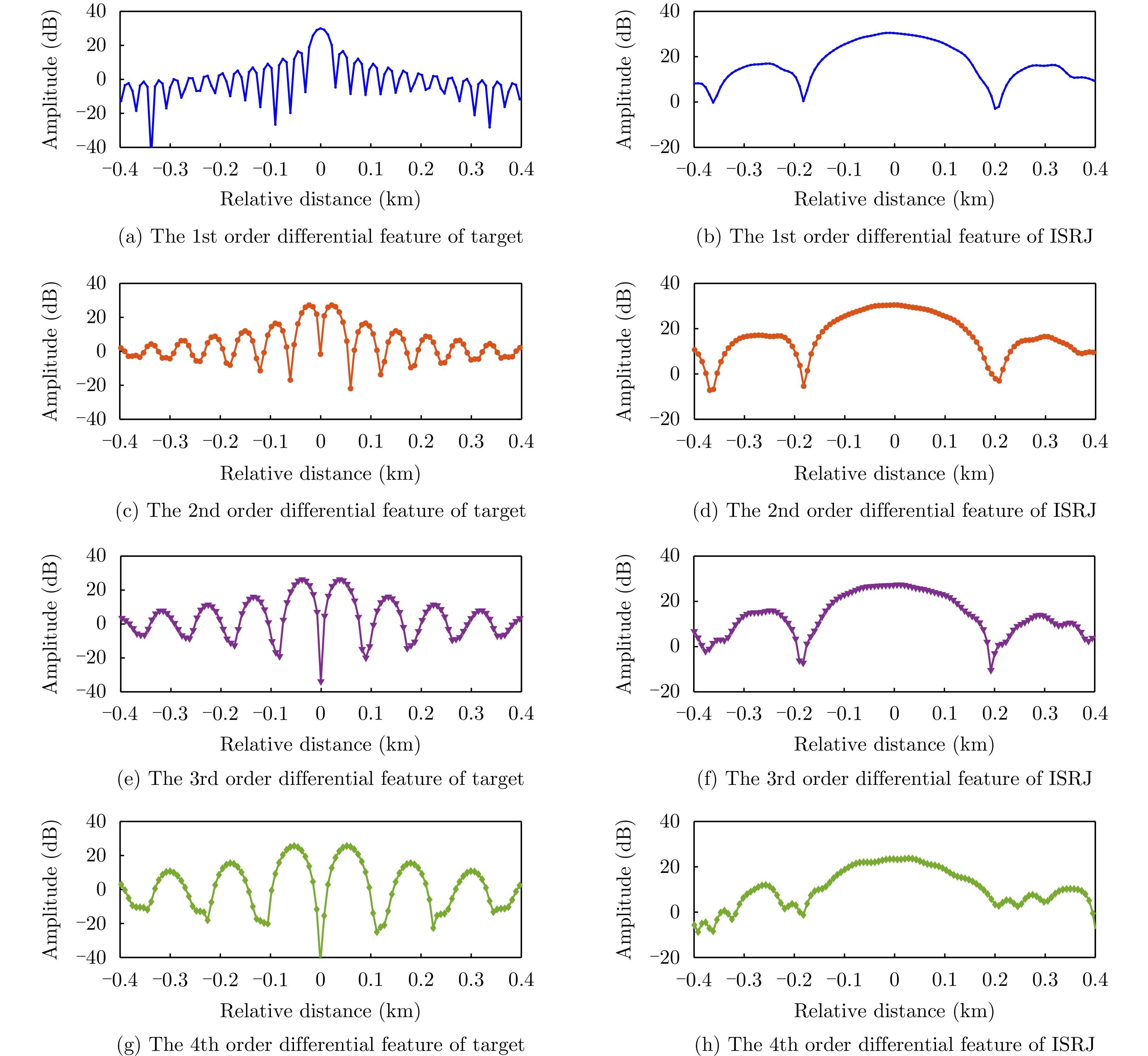
摘要: 间歇采样转发式干扰机通过对其接收到的雷达发射信号进行采样、存储、处理和多次转发,在雷达接收端形成逼真的假目标干扰效果。为提升上述干扰场景下的雷达探测性能,该文提出了一种新的信号差分特征提取方法,在此基础上,利用目标回波和干扰信号在差分特征空间的差异设计判决准则,从而在有效辨识并抑制干扰的同时实现目标检测。仿真结果表明:该方法干扰抑制效果显著,相比于3种典型的时频域滤波算法等效信噪比改善4.2 dB以上。Abstract: The interrupted-sampling repeater jammer can sample, store, process and transmit part of the radar transmitter signal multiple times and the fake targets will form on the radar receiver. To improve the radar performance in the aforementioned jamming scenario, in this study, a new signal differential feature extraction method is proposed, and a judgment criterion is formulated based on the difference between the target echo and the Interrupted-Sampling Repeater Jamming (ISRJ) in the differential feature space to effectively identify and suppress the ISRJ while achieving target detection. Simulation results show that the proposed method has a remarkable ISRJ suppression performance. The equivalent signal-to-noise ratio is improved by at least 4.2 dB compared with three typical time-frequency domain filtering algorithms.
-

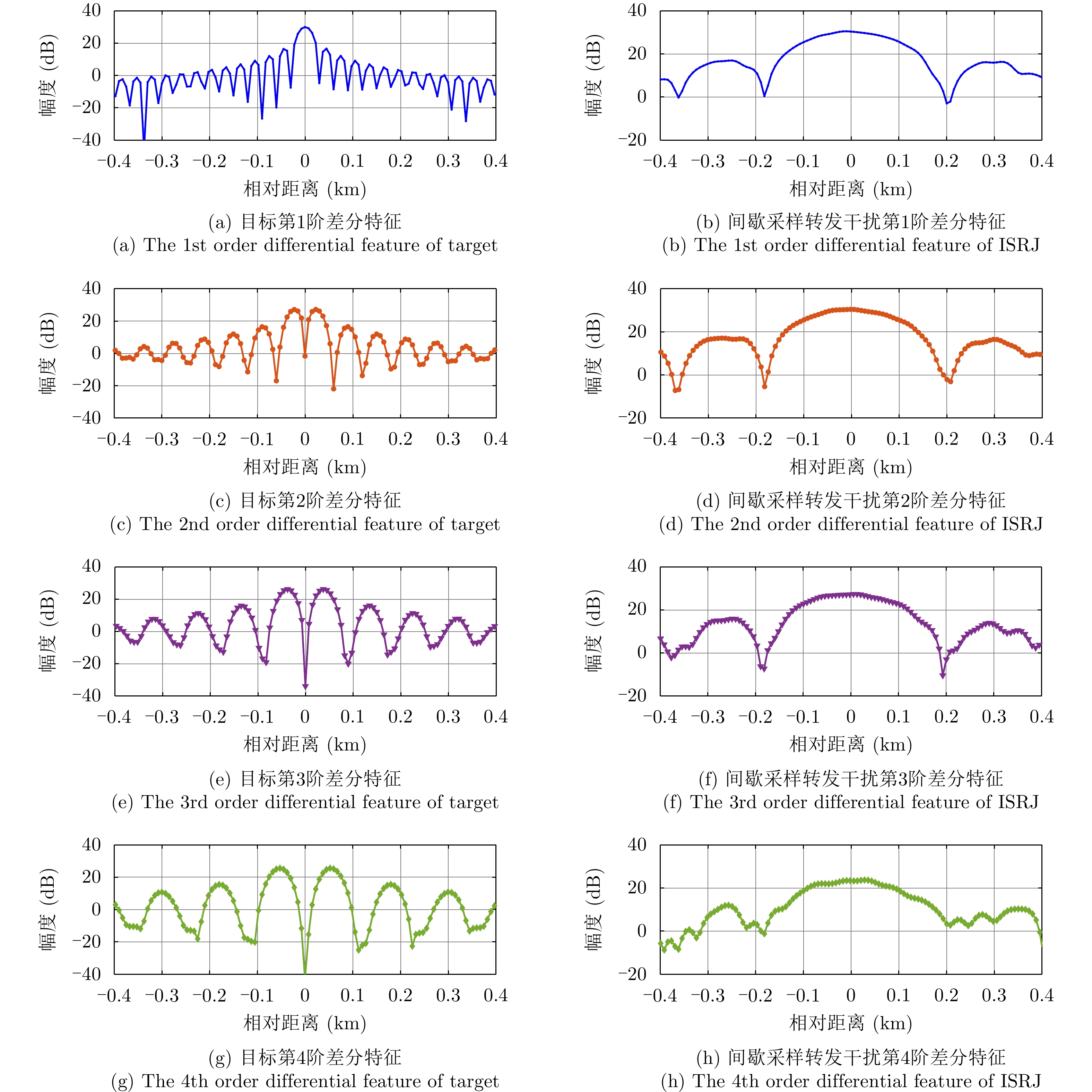
图 2 目标与间歇采样转发干扰差分特征对比
Figure 2. Comparison of the differential features between target and ISRJ

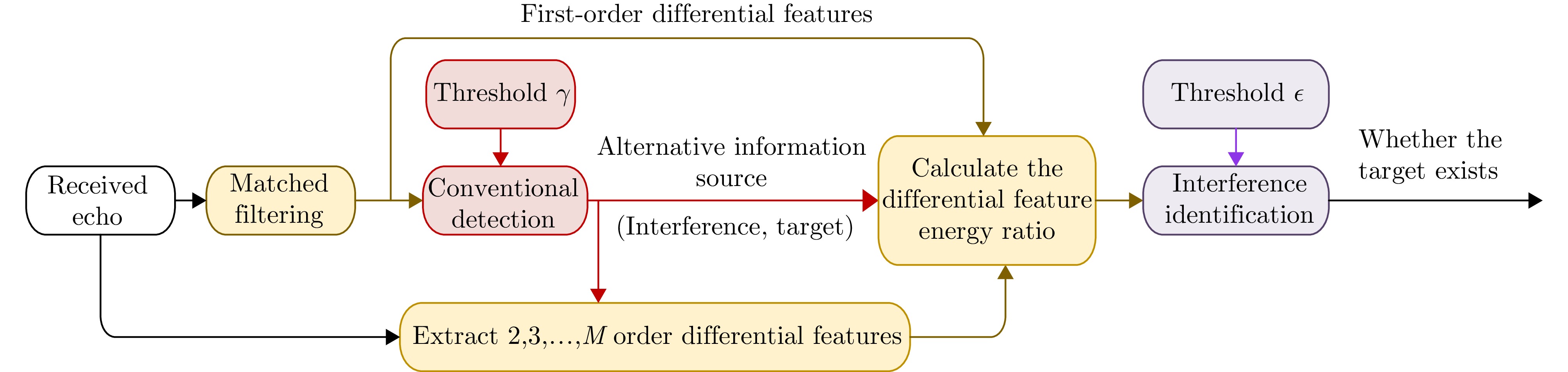
图 3 基于差分特征的间歇采样转发干扰辨识与抑制流程图
Figure 3. Flow chart of the ISRJ identification and suppression based on differential features
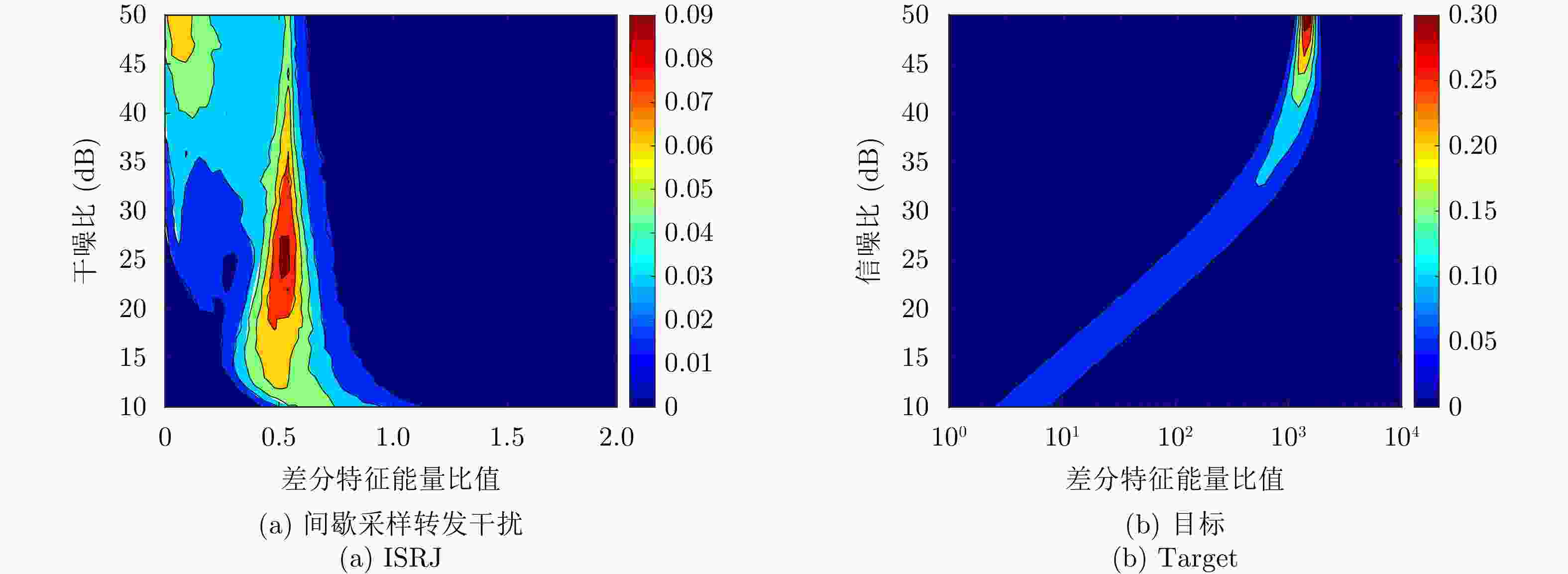
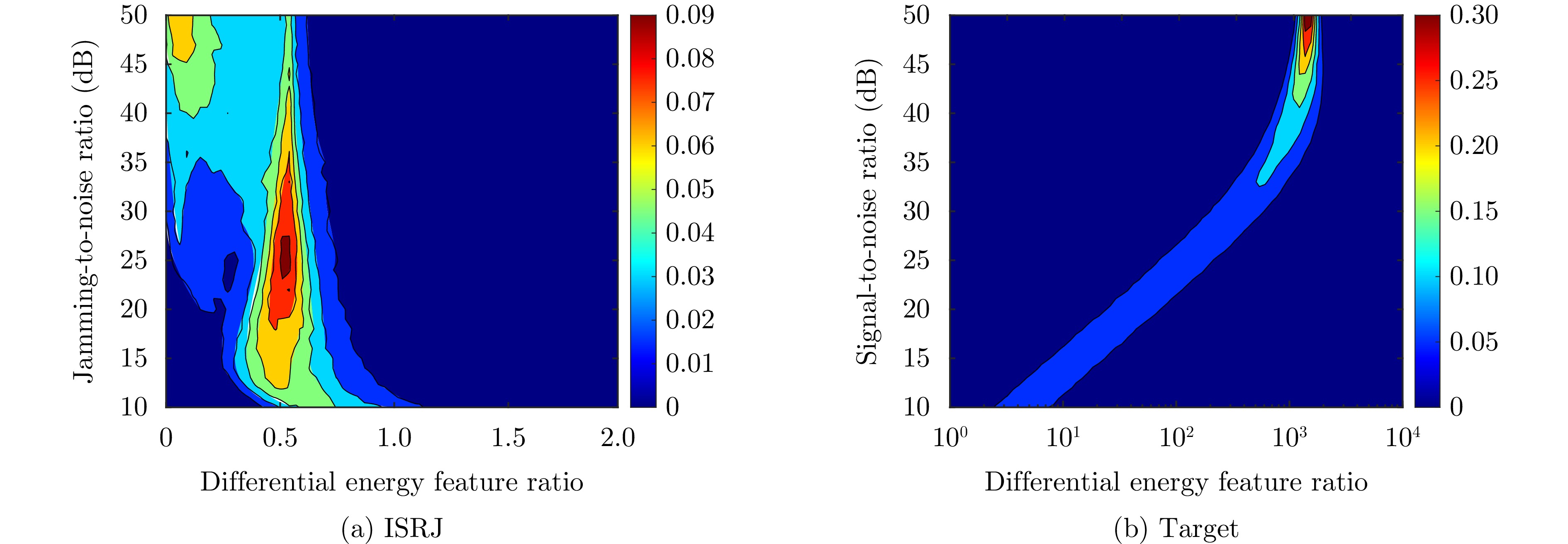
图 4 不同干噪比、信噪比下,干扰、目标处差分特征能量比值的概率分布
Figure 4. The probability distribution of differential features energy ratio under different jamming-to-noise ratio and signal-to-noise ratio for ISRJ and target
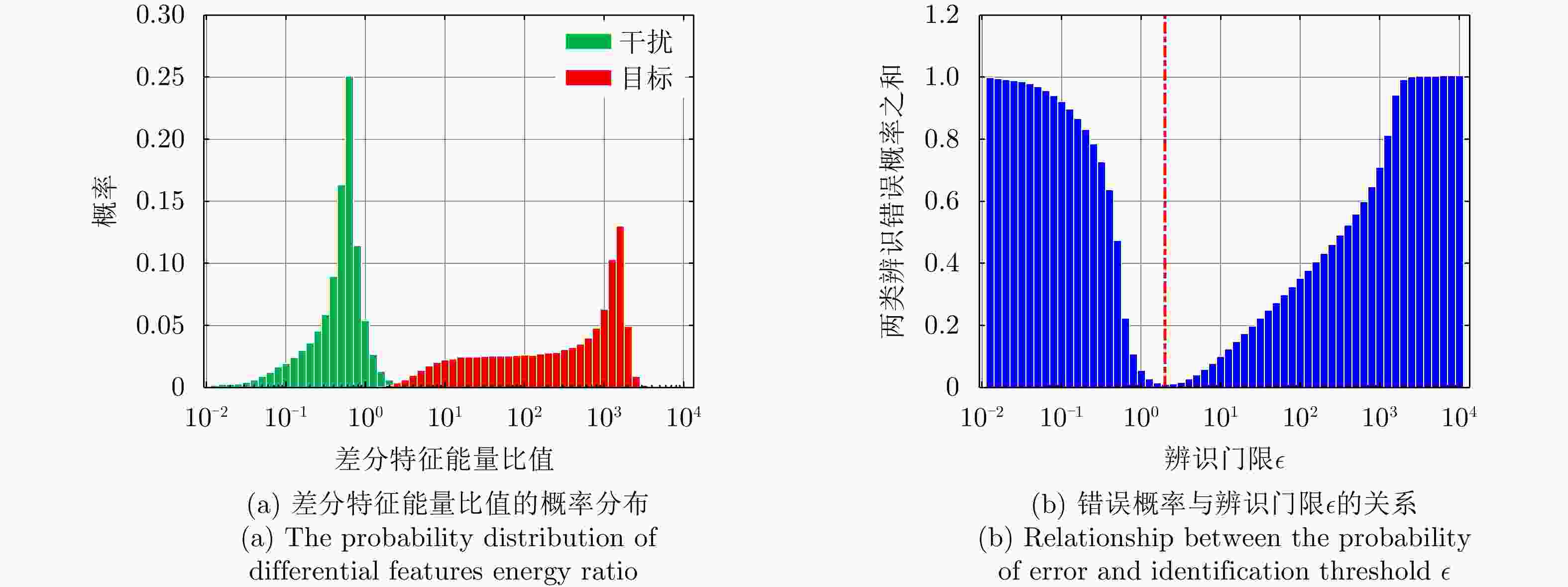
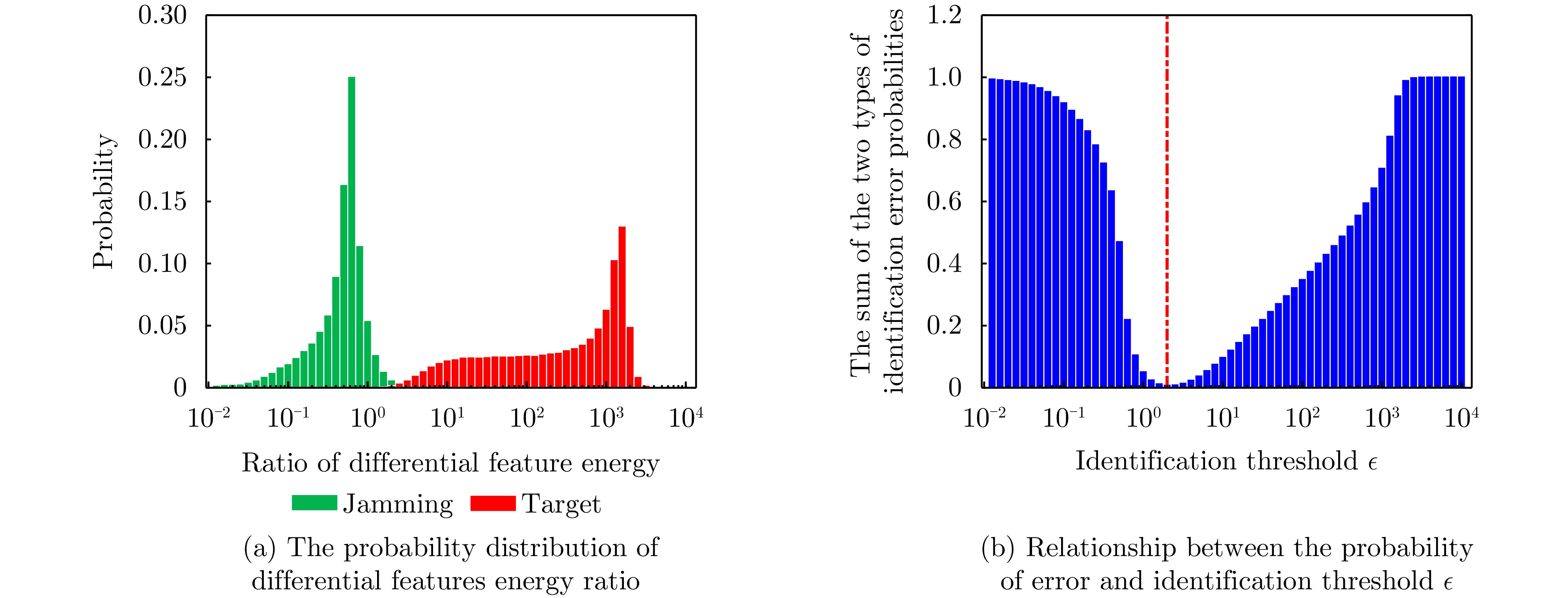
图 5 由最小错误概率准则确定辨识门限
$\epsilon $ Figure 5. The determination of identification threshold
$\epsilon $ by minimizing the probability of error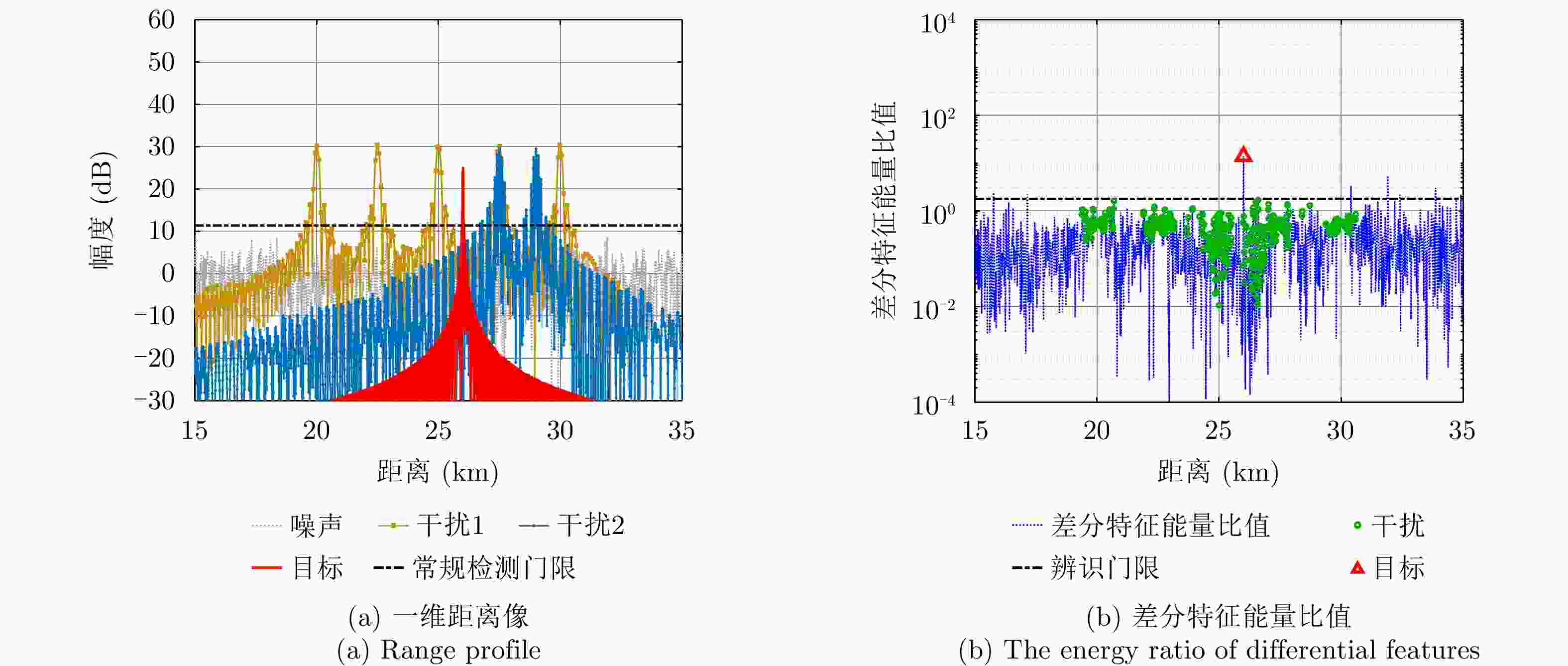
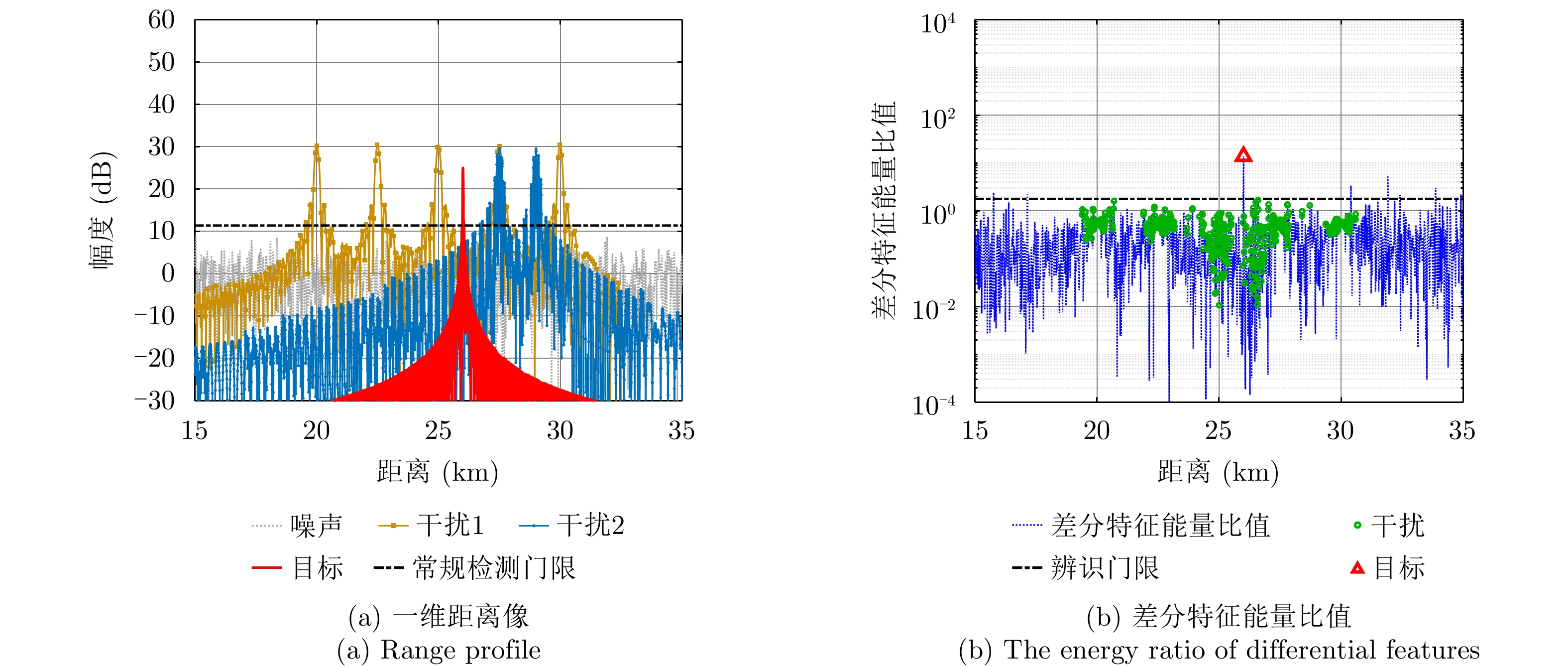
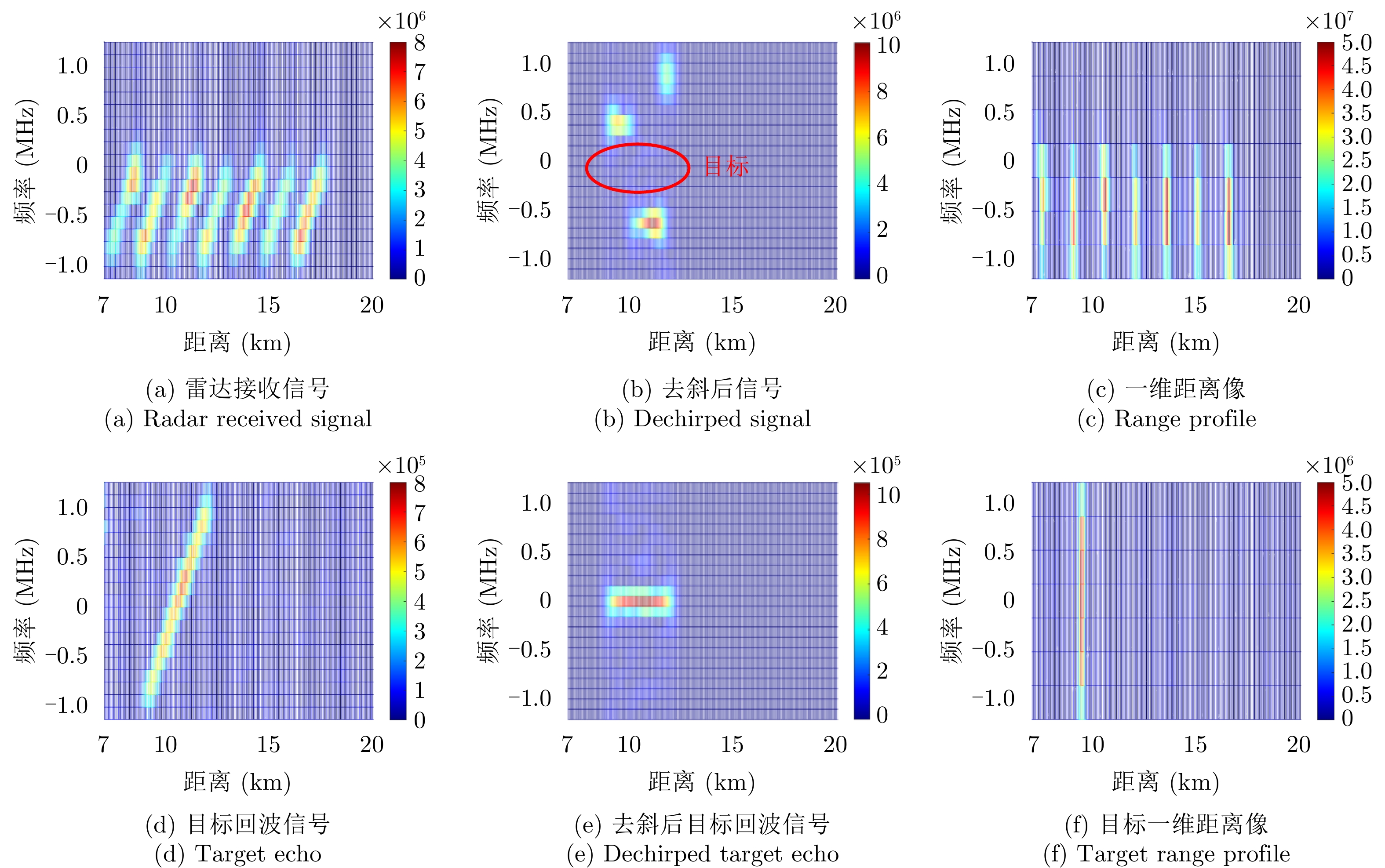
图 6 仿真数据间歇采样转发干扰辨识与抑制结果
Figure 6. ISRJ identification and suppression results for simulation data
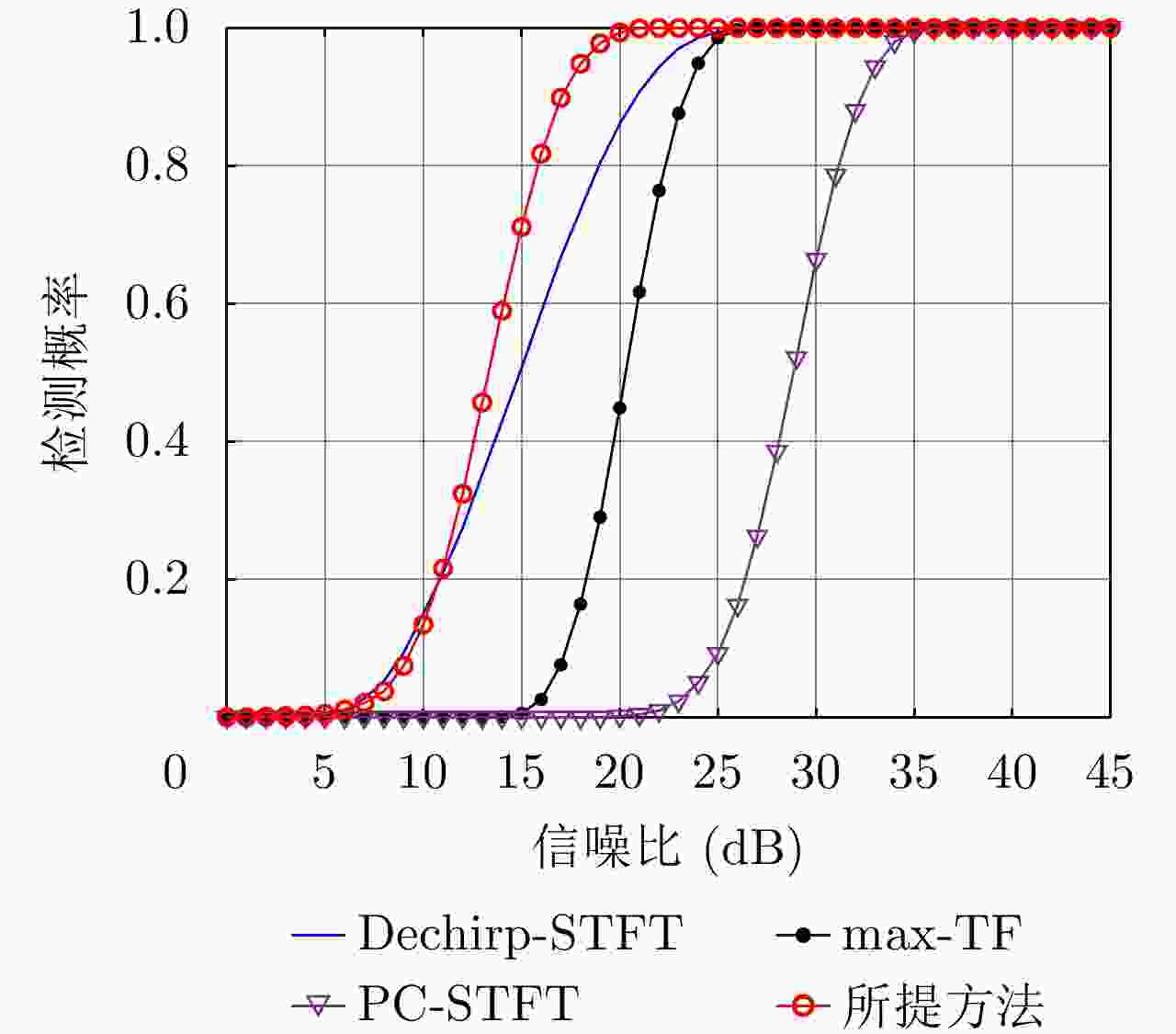
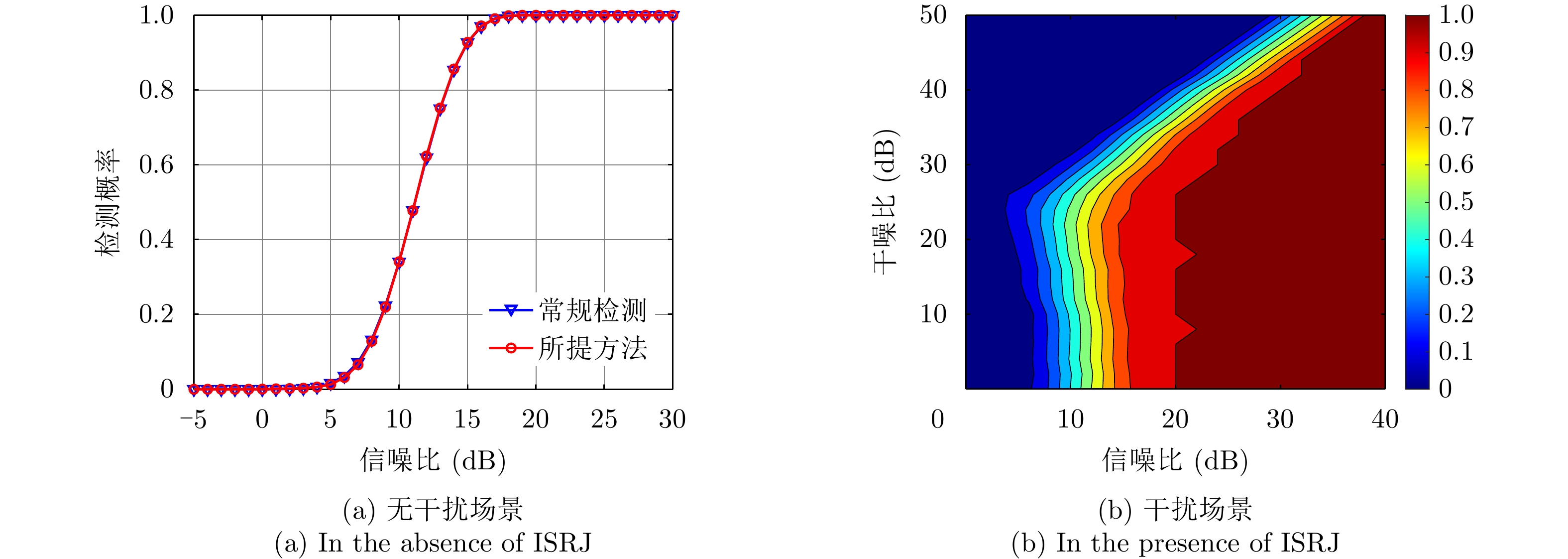
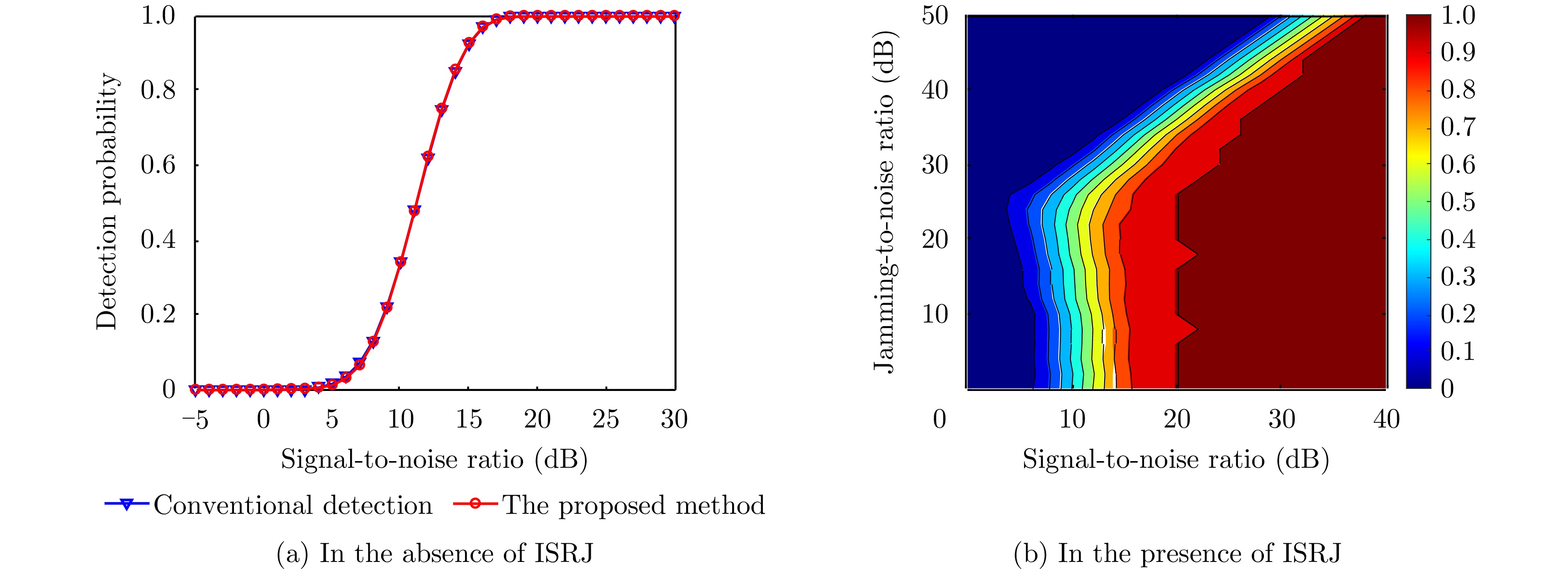
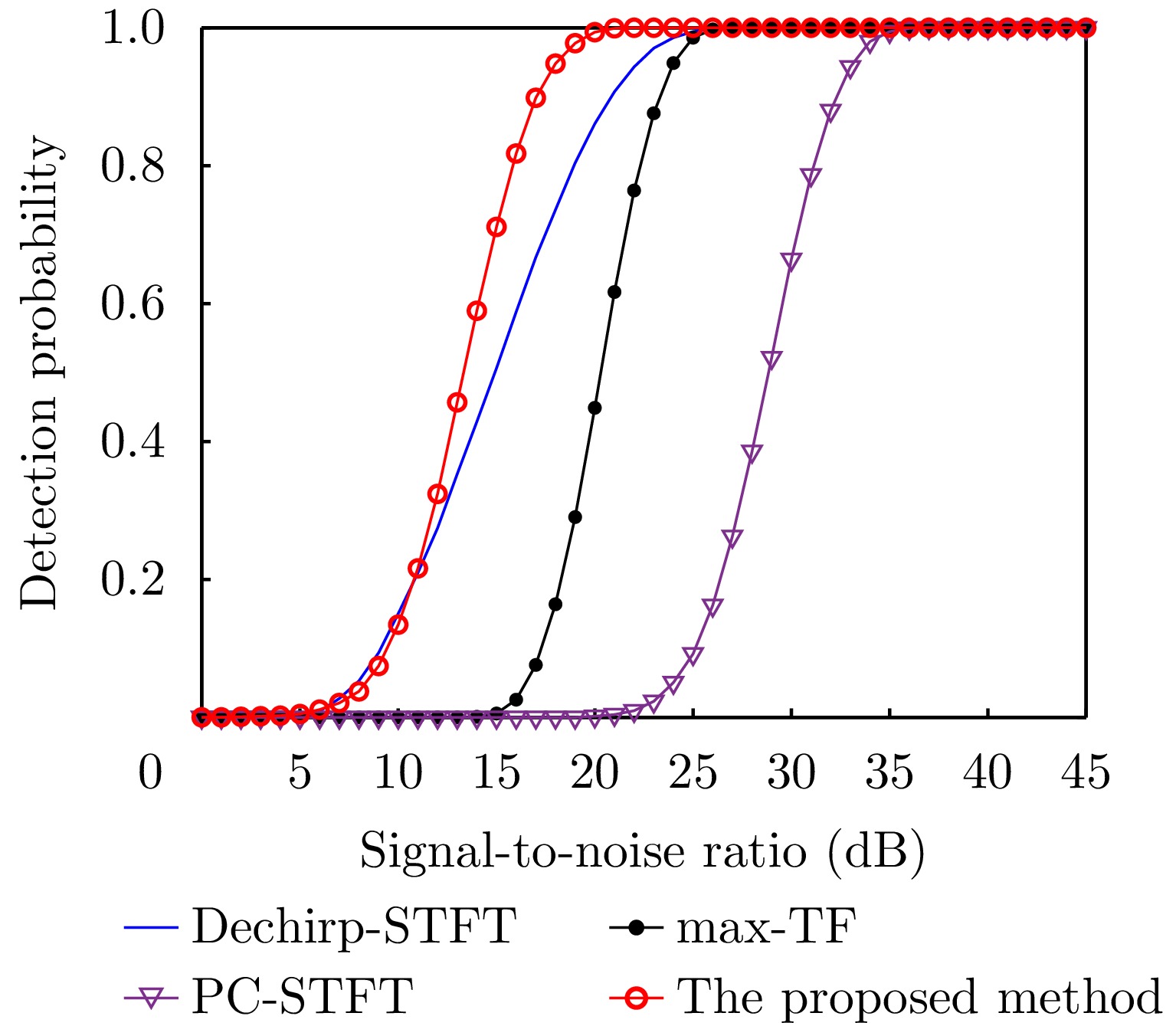
图 8 4种方法检测性能对比(仿真数据)
Figure 8. The detection performance comparison of the four methods (simulation data)
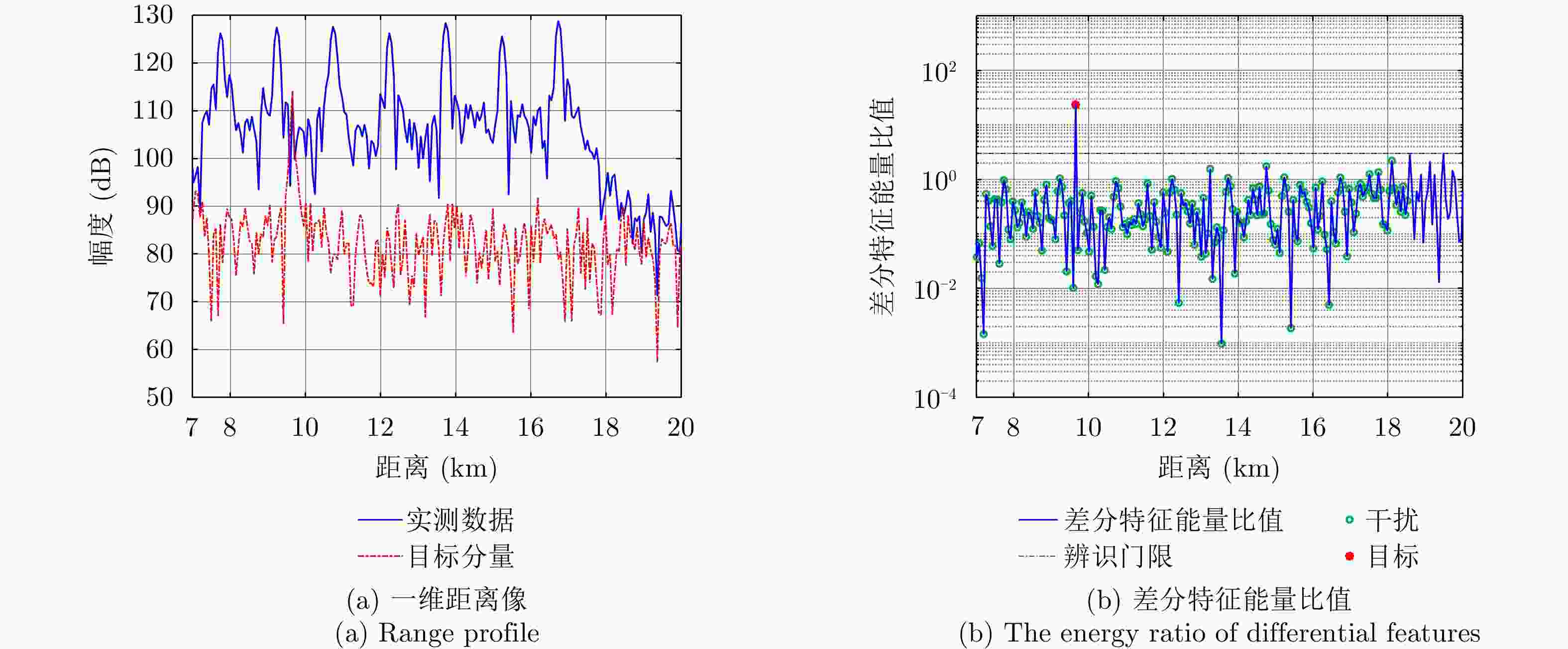
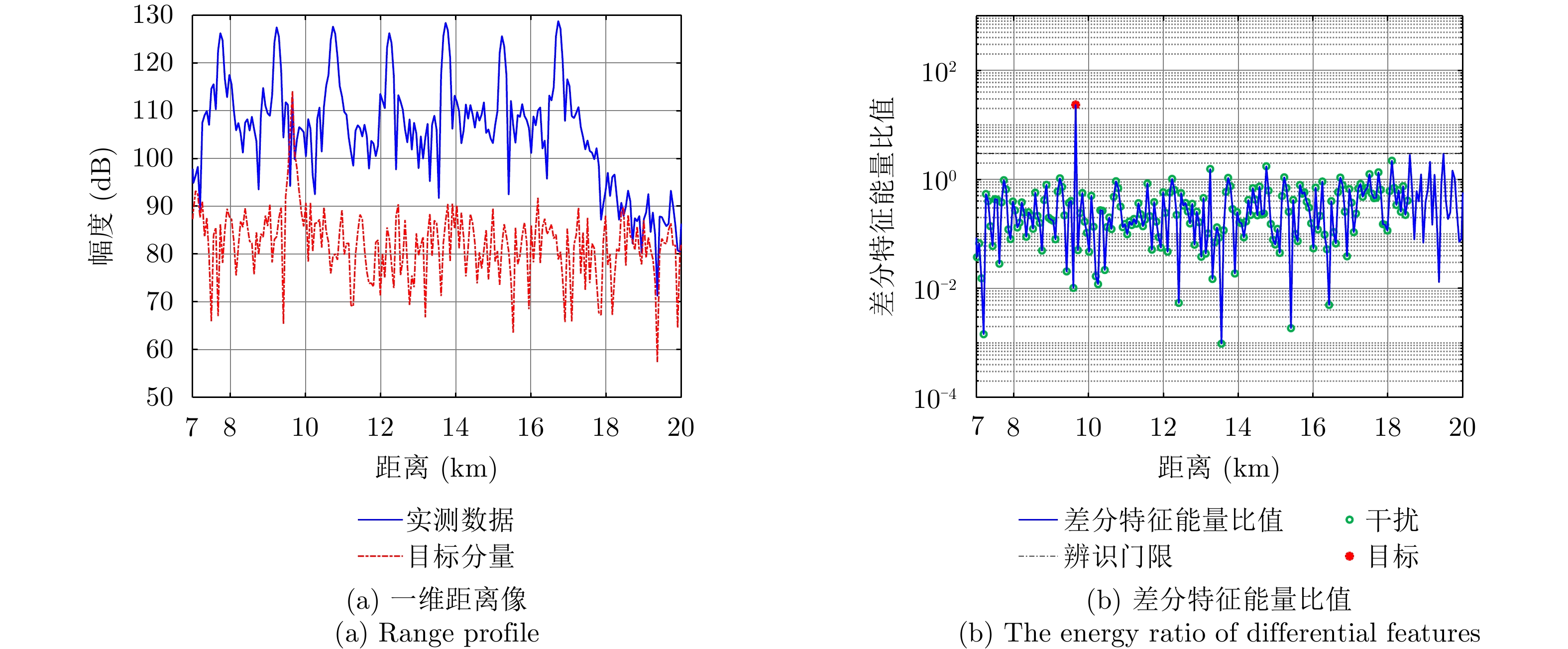
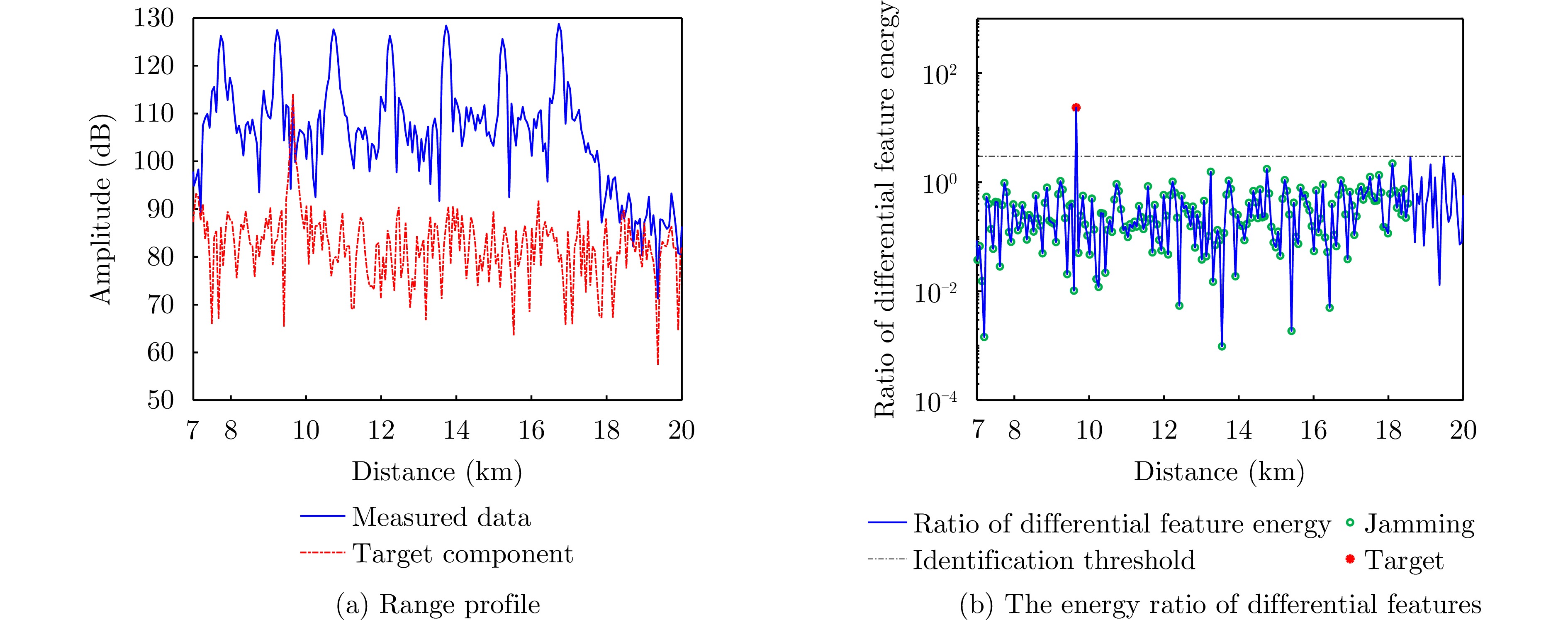
图 9 实测数据间歇采样转发干扰辨识与抑制结果
Figure 9. ISRJ identification and suppression results for measured data

图 4 The probability distribution of differential features energy ratio under different jamming-to-noise ratio and signal-to-noise ratio for ISRJ and target

图 5 The determination of identification threshold
$\epsilon $ by minimizing the probability of error表 1 归一化差分序列
Table 1. Normalized differential sequence
M 各项系数$ {c_M}(m),m = 0,1, \cdots ,M - 1 $ 1 1 2 $ 1/\sqrt{2},-1/\sqrt{2} $ 3 $ 1/\sqrt{6},-2/\sqrt{6},1/\sqrt{6} $ 4 $ 1/2\sqrt{5},-3/2\sqrt{5},3/2\sqrt{5},-1/2\sqrt{5} $ 5 $ 1/\sqrt{70},-4/\sqrt{70},6/\sqrt{70},-4/\sqrt{70},1/\sqrt{70} $  下载: 导出CSV
下载: 导出CSV
表 2 仿真数据信源参数
Table 2. Source parameters for simulation data
信源 波形参数 脉压后信(干)噪比 目标 脉宽100 μs,带宽5 MHz 10~50 dB,间隔1 dB 干扰1 切片宽度16.67 μs,切片1次重复转发5次 10~50 dB,间隔1 dB 干扰2 切片宽度10 μs,切片1次立即重复转发2次,共切片3次 10~50 dB,间隔1 dB
下载: 导出CSV
表 4 不同干噪比下,检测概率为95%时所需的信噪比
Table 4. When the detection probability is 95%, the required signal-to-noise ratios under different jamming-to-noise ratios
干噪比(dB) 所需信噪比(dB) 无干扰 15.5 10 17.9 20 17.4 30 21.4 40 29.5 50 38.5
下载: 导出CSV
表 5 实测数据信源参数
Table 5. Source parameters for measured data
目标参数 数值 干扰参数 数值 脉宽(μs) 20 脉宽(μs) 10 带宽(MHz) 2 带宽(MHz) 1 脉压后信噪比(dB) 33 脉压后信噪比(dB) 45
下载: 导出CSV
表 1 Normalized differential sequence
M Various coefficients $ {c}_{M}\left(m\right),m=\mathrm{0,1},\cdots ,M-1 $ 1 1 2 $ 1/\sqrt{2},-1/\sqrt{2} $ 3 $ \text{3}1/\sqrt{6},-2/\sqrt{6},1/\sqrt{6} $ 4 $ 1/2\sqrt{5},-3/2\sqrt{5},3/2\sqrt{5},-1/2\sqrt{5} $ 5 $ 1/\sqrt{70},-4/\sqrt{70},6/\sqrt{70},-4/\sqrt{70},1/\sqrt{70} $
下载: 导出CSV
表 2 Source parameters for simulation data
Signal source Waveform parameters Signal(jamming)-to-noise ratio after pulse compression Target Pulse width 100 μs, bandwidth 5 MHz 10 to 50 dB, with an increment of 1 dB Interference 1 Slice width 16.67 μs, slice repeated forwarding 5 times 10 to 50 dB, with an increment of 1 dB Interference 2 The slice width is 10 μs, and the slice is repeated and forwarded twice
immediately after each slice, for a total of three slices10 to 50 dB, with an increment of 1 dB
下载: 导出CSV
表 3 Simulation parameters
Parameters Numerical value Conventional detection threshold 13.82 Maximum differential order 6 Identification threshold 1.79
下载: 导出CSV
表 4 When the detection probability is 95%, the required signal-to-noise ratios under different jamming-to-noise ratios
Jamming-to-noise ratios (dB) The required signal-to-noise ratios (dB) No interference 15.5 10 17.9 20 17.4 30 21.4 40 29.5 50 38.5
下载: 导出CSV
表 5 Source parameters for measured data
Target parameters Value Interference parameters Value Pulse width (μs) 20 Pulse width (μs) 10 Bandwidth (MHz) 2 Bandwidth (MHz) 1 Signal-to-noise ratio after pulse compression (dB) 33 Signal-to-noise ratio after pulse compression (dB) 45
下载: 导出CSV
-
[1] 王雪松, 刘建成, 张文明,等. 间歇采样转发干扰的数学原理[J]. 中国科学E辑, 2006, 36(8): 891–901. doi: 10.3969/j.issn.1674-7259.2006.08.007.WANG Xuesong, LIU Jiancheng, ZHANG Wenming, et al. Mathematic principles of interrupted-sampling repeater jamming (ISRJ)[J]. Science in China Series E: Information Sciences, 2006, 36(8): 891–901. doi: 10.3969/j.issn.1674-7259.2006.08.007. [2] 刘忠, 王雪松, 刘建成, 等. 基于数字射频存储器的间歇采样重复转发干扰[J]. 兵工学报, 2008, 29(4): 405–410. doi: 10.3321/j.issn:1000-1093.2008.04.005.LIU Zhong, WANG Xuesong, LIU Jiancheng, et al. Jamming technique of interrupted-sampling and periodic repeater based on digital radio frequency memory[J]. Acta Armamentarii, 2008, 29(4): 405–410. doi: 10.3321/j.issn:1000-1093.2008.04.005. [3] GRECO M, GINI F, and FARINA A. Radar detection and classification of jamming signals belonging to a cone class[J]. IEEE Transactions on Signal Processing, 2008, 56(5): 1984–1993. doi: 10.1109/TSP.2007.909326. [4] 李宏, 郑光勇, 杨英科, 等. 部分截取雷达信号多假目标干扰性能分析[J]. 电子信息对抗技术, 2010, 25(3): 39–44. doi: 10.3969/j.issn.1674-2230.2010.03.010.LI Hong, ZHENG Guangyong, YANG Yingke, et al. The performance analysis of multi-false targets jamming of part copying radar pulse[J]. Electronic Information Warfare Technology, 2010, 25(3): 39–44. doi: 10.3969/j.issn.1674-2230.2010.03.010. [5] ZHANG Jindong, ZHU Daiyin, and ZHANG Gong. New antivelocity deception jamming technique using pulses with adaptive initial phases[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1290–1300. doi: 10.1109/TAES.2013.6494414. [6] 李宏, 牟能文, 郭雷. 相参干扰的压制距离[J]. 电子信息对抗技术, 2015, 30(4): 33–36. doi: 10.3969/j.issn.1674-2230.2015.04.008.LI Hong, MOU Nengwen, and GUO Lei. Depressing distance of coherent jamming[J]. Electronic Information Warfare Technology, 2015, 30(4): 33–36. doi: 10.3969/j.issn.1674-2230.2015.04.008. [7] 施富强, 周超, 刘泉华. 间歇采样重复转发式干扰特性分析[J]. 信号处理, 2017, 33(12): 1616–1624. doi: 10.16798/j.issn.1003-0530.2017.12.013.SHI Fuqiang, ZHOU Chao, and LIU Quanhua. Characteristics analysis of interrupted-sampling repeater jamming[J]. Journal of Signal Processing, 2017, 33(12): 1616–1624. doi: 10.16798/j.issn.1003-0530.2017.12.013. [8] FENG Dejun, XU Letao, PAN Xiaoyi, et al. Jamming wideband radar using interrupted-sampling repeater[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1341–1354. doi: 10.1109/TAES.2017.2670958. [9] CHEN Fengbo, LI Rongfeng, DING Liming, et al. A method against DRFM dense false target jamming based on jamming recognization[C]. IET International Radar Conference 2015, Hangzhou, China, 2015: 1–4. [10] 陈静, 李晗, 张洪纲, 等. 分布式雷达主瓣间歇采样转发干扰抑制方法[J]. 信号处理, 2018, 34(11): 1368–1376. doi: 10.16798/j.issn.1003-0530.2018.11.013.CHEN Jing, LI Han, ZHANG Honggang, et al. Main-lobe interrupted sampling repeater jamming suppression method in distributed radar[J]. Journal of Signal Processing, 2018, 34(11): 1368–1376. doi: 10.16798/j.issn.1003-0530.2018.11.013. [11] 周畅, 汤子跃, 余方利, 等. 基于脉内正交的抗间歇采样转发干扰方法[J]. 系统工程与电子技术, 2017, 39(2): 269–276. doi: 10.3969/j.issn.1001-506X.2017.02.06.ZHOU Chang, TANG Ziyue, YU Fangli, et al. Anti intermittent sampling repeater jamming method based on intrapulse orthogonality[J]. Systems Engineering and Electronics, 2017, 39(2): 269–276. doi: 10.3969/j.issn.1001-506X.2017.02.06. [12] ZHANG Jiaxiang and ZHOU Chao. Interrupted sampling repeater jamming suppression method based on hybrid modulated radar signal[C]. 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 2019: 1–4. [13] 周畅, 汤子跃, 朱振波, 等. 抗间歇采样转发干扰的波形设计方法[J]. 电子与信息学报, 2018, 40(9): 2198–2205. doi: 10.11999/JEIT171236.ZHOU Chang, TANG Ziyue, ZHU Zhenbo, et al. Anti-interrupted sampling repeater jamming waveform design method[J]. Journal of Electronics & Information Technology, 2018, 40(9): 2198–2205. doi: 10.11999/JEIT171236. [14] ZHANG Yang, WEI Yinsheng, and YU Lei. Interrupted sampling repeater jamming recognition and suppression based on phase-coded signal processing[J]. Signal Processing, 2022, 198: 108596. doi: 10.1016/j.sigpro.2022.108596. [15] ZHOU Kai, LI Dexin, SU Yi, et al. Joint design of transmit waveform and mismatch filter in the presence of interrupted sampling repeater jamming[J]. IEEE Signal Processing Letters, 2020, 27: 1610–1614. doi: 10.1109/LSP.2020.3021667. [16] TIAN Dezhi, REN Wei, ZHANG Lu, et al. An adaptive scheme for chopping and interleaving jamming suppression based on the mismatched filter[C]. 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 2021: 78–83. [17] ZHOU Kai, LI Dexin, QUAN Sinong, et al. SAR Waveform and mismatched filter design for countering interrupted-sampling repeater jamming[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5214514. doi: 10.1109/TGRS.2021.3107328. [18] ZHOU Chao, LIU Quanhua, and CHEN Xinliang. Parameter estimation and suppression for DRFM-based interrupted sampling repeater jammer[J]. IET Radar, Sonar & Navigation, 2018, 12(1): 56–63. doi: 10.1049/iet-rsn.2017.0114. [19] GONG Shixian, WEI Xizhang, and LI Xiang. ECCM scheme against interrupted sampling repeater jammer based on time-frequency analysis[J]. Journal of Systems Engineering and Electronics, 2014, 25(6): 996–1003. doi: 10.1109/JSEE.2014.00114. [20] CHEN Jian, WU Wenzhen, XU Shiyou, et al. Band pass filter design against interrupted-sampling repeater jamming based on time-frequency analysis[J]. IET Radar, Sonar & Navigation, 2019, 13(10): 1646–1654. doi: 10.1049/iet-rsn.2018.5658. [21] 周超, 刘泉华, 胡程. 间歇采样转发式干扰的时频域辨识与抑制[J]. 雷达学报, 2019, 8(1): 100–106. doi: 10.12000/JR18080.ZHOU Chao, LIU Quanhua, and HU Cheng. Time-frequency analysis techniques for recognition and suppression of interrupted sampling repeater jamming[J]. Journal of Radars, 2019, 8(1): 100–106. doi: 10.12000/JR18080. [22] KAY S M. Fundamentals of Statistical Signal Processing: Detection Theory Volume II[M]. Englewood: Prentice-Hall, Inc., 1998: 77–79. -









计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

