
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | CHEN Hui, WEI Fengqi, and HAN Chongzhao. UAV path planning strategy based on threat avoidance in multiple extended target tracking optimization[J]. Journal of Radars, 2023, 12(3): 529–540. doi: 10.12000/JR22116

|
UAV Path Planning Strategy Based on Threat Avoidance in Multiple Extended Target Tracking Optimization
DOI: 10.12000/JR22116 CSTR: 32380.14.JR22116
More Information-
Abstract
To reduce the probability of UAV (Unmanned Aerial Vehicle) being destroyed during a reconnaissance mission, this study proposes an effective path planning algorithm to reduce the target threat. First, high-resolution airborne radar is used for robust tracking and estimation of multiple extended targets. Subsequently, the targets are classified based on the threat degree calculated via fuzzy TOPSIS (Technique for Order Preference by Similarity to an Ideal Solution). Next, path planning of a UAV is performed considering joint optimization of multiple task decision-making (the joint evaluation of the target threat degree and target tracking performance) as an evaluation criterion. The simulation results indicate that the fuzzy threat assessment method is effective in multiple extended target tracking, and the proposed UAV path planning algorithm is reasonable. Thus the target threat is efficiently reduced without losing the tracking accuracy. -

-
References
[1] AGGARWAL S and KUMAR N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges[J]. Computer Communications, 2020, 149: 270–299. doi: 10.1016/j.comcom.2019.10.014[2] BAYERLEIN H, THEILE M, CACCAMO M, et al. Multi-UAV path planning for wireless data harvesting with deep reinforcement learning[J]. IEEE Open Journal of the Communications Society, 2021, 2: 1171–1187. doi: 10.1109/OJCOMS.2021.3081996[3] BOLOURIAN N and HAMMAD A. LiDAR-equipped UAV path planning considering potential locations of defects for bridge inspection[J]. Automation in Construction, 2020, 117: 103250. doi: 10.1016/j.autcon.2020.103250[4] BASIRI A, MARIANI V, SILANO G, et al. A survey on the application of path-planning algorithms for multi-rotor UAVs in precision agriculture[J]. Journal of Navigation, 2022, 75(2): 364–383. doi: 10.1017/S0373463321000825[5] KARUR K, SHARMA N, DHARMATTI C, et al. A survey of path planning algorithms for mobile robots[J]. Vehicles, 2021, 3(3): 448–468. doi: 10.3390/vehicles3030027[6] REN Tianzhu, ZHOU Rui, XIA Jie, et al. Three-dimensional path planning of UAV based on an improved A algorithm[C]. 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 2016: 140–145.[7] SARANYA C, UNNIKRISHNAN M, ALI S A, et al. Terrain based D* algorithm for path planning[J]. IFAC-PapersOnLine, 2016, 49(1): 178–182. doi: 10.1016/j.ifacol.2016.03.049[8] MAUROVIĆ I, SEDER M, LENAC K, et al. Path planning for active SLAM based on the D* algorithm with negative edge weights[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 48(8): 1321–1331. doi: 10.1109/TSMC.2017.2668603[9] RUZ J J, AREVALO O, DE LA CRUZ J M, et al. Using MILP for UAVs trajectory optimization under radar detection risk[C]. 2006 IEEE Conference on Emerging Technologies and Factory Automation, Prague, Czech Republic, 2006: 957–960.[10] PEHLIVANOGLU Y V. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV[J]. Aerospace Science and Technology, 2012, 16(1): 47–55. doi: 10.1016/j.ast.2011.02.006[11] PHUNG M D and HA Q P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107: 107376. doi: 10.1016/j.asoc.2021.107376[12] KONATOWSKI S. Application of the ACO algorithm for UAV path planning[J]. Przeglad Elektrotechniczny, 2019, 1(7): 117–121. doi: 10.15199/48.2019.07.24[13] 周彬, 郭艳, 李宁, 等. 基于导向强化Q学习的无人机路径规划[J]. 航空学报, 2021, 42(9): 325109. doi: 10.7527/S1000-6893.2021.25109ZHOU Bin, GUO Yan, LI Ning, et al. Path planning of UAV using guided enhancement Q-learning algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(9): 325109. doi: 10.7527/S1000-6893.2021.25109[14] XU Liang and NIU Ruixin. Tracking visual object as an extended target[C]. 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, USA, 2021: 664–668.[15] 陈辉, 杜金瑞, 韩崇昭. 基于星凸形随机超曲面模型多扩展目标多伯努利滤波器[J]. 自动化学报, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130CHEN Hui, DU Jinrui, and HAN Chongzhao. A multiple extended target multi-bernouli filter based on star-convex random hypersurface model[J]. Acta Automatica Sinica, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130[16] KHALKHALI M B, VAHEDIAN A, and YAZDI H S. Multi-target state estimation using interactive Kalman filter for multi-vehicle tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 1131–1144. doi: 10.1109/TITS.2019.2902664[17] KIM D Y, VO B N, VO B T, et al. A labeled random finite set online multi-object tracker for video data[J]. Pattern Recognition, 2019, 90: 377–389. doi: 10.1016/j.patcog.2019.02.004[18] MAHLER R P S. Advances in Statistical Multisource-Multitarget Information Fusion[M]. Boston, USA: Artech House, 2014: 825–860.[19] MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Boston, USA: Artech House, 2007: 655–667.[20] 杨威, 付耀文, 龙建乾, 等. 基于有限集统计学理论的目标跟踪技术研究综述[J]. 电子学报, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025YANG Wei, FU Yaowen, LONG Jianqian, et al. The FISST-based target tracking techniques: A survey[J]. Acta Electronica Sinica, 2012, 40(7): 1440–1448. doi: 10.3969/j.issn.0372-2112.2012.07.025[21] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119[22] VO B N, SINGH S, and DOUCET A. Sequential Monte Carlo methods for multitarget filtering with random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224–1245. doi: 10.1109/TAES.2005.1561884[23] VO B N and MA W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091–4104. doi: 10.1109/TSP.2006.881190[24] VO B T, VO B N, and CANTONI A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409–423. doi: 10.1109/TSP.2008.2007924[25] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822[26] VO B N, VO B T, and PHUNG D. Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24): 6554–6567. doi: 10.1109/TSP.2014.2364014[27] REUTER S, VO B T, VO B N, et al. The labeled multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12): 3246–3260. doi: 10.1109/TSP.2014.2323064[28] BAUM M and HANEBECK U D. Random hypersurface models for extended object tracking[C]. 2009 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ajman, United Arab Emirates, 2009: 178–183.[29] THORMANN K, BAUM M, and HONER J. Extended target tracking using Gaussian processes with high-resolution automotive radar[C]. 2018 21st International Conference on Information Fusion (FUSION), Cambridge, United Kingdom, 2018: 1764–1770.[30] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362[31] FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064[32] 张银燕, 李弼程. 基于MIN-MAX云重心推理的目标威胁评估方法[J]. 系统仿真学报, 2014, 26(2): 411–418. doi: 10.16182/j.cnki.joss.2014.02.041ZHANG Yinyan and LI Bicheng. Method of target threat assessment based on cloudy MIN-MAX center of gravity reasoning[J]. Journal of System Simulation, 2014, 26(2): 411–418. doi: 10.16182/j.cnki.joss.2014.02.041[33] 李特, 冯琦, 张堃. 基于熵权灰色关联和D-S证据理论的威胁评估[J]. 计算机应用研究, 2013, 30(2): 380–382. doi: 10.3969/j.issn.1001-3695.2013.02.016LI Te, FENG Qi, and ZHANG Kun. Threat assessment based on entropy weight grey incidence and D-S theory of evidence[J]. Application Research of Computers, 2013, 30(2): 380–382. doi: 10.3969/j.issn.1001-3695.2013.02.016[34] 高晓光, 李青原, 邸若海. 基于DBN威胁评估的MPC无人机三维动态路径规划[J]. 系统工程与电子技术, 2014, 36(11): 2199–2205. doi: 10.3969/j.issn.1001-506X.2014.11.14GAO Xiaoguang, LI Qingyuan, and DI Ruohai. MPC three-dimensional dynamic path planning for UAV based on DBN threat assessment[J]. Systems Engineering and Electronics, 2014, 36(11): 2199–2205. doi: 10.3969/j.issn.1001-506X.2014.11.14[35] 张堃, 王雪, 张才坤, 等. 基于IFE动态直觉模糊法的空战目标威胁评估[J]. 系统工程与电子技术, 2014, 36(4): 697–701. doi: 10.3969/j.issn.1001-506X.2014.04.15ZHANG Kun, WANG Xue, ZHANG Caikun, et al. Evaluating and sequencing of air target threat based on IFE and dynamic intuitionistic fuzzy sets[J]. Systems Engineering and Electronics, 2014, 36(4): 697–701. doi: 10.3969/j.issn.1001-506X.2014.04.15[36] GAO Yang, LI Dongsheng, and ZHONG Hua. A novel target threat assessment method based on three-way decisions under intuitionistic fuzzy multi-attribute decision making environment[J]. Engineering Applications of Artificial Intelligence, 2020, 87: 103276. doi: 10.1016/j.engappai.2019.103276[37] WANG Yi, LIU Sanyang, NIU Wei, et al. Threat assessment method based on intuitionistic fuzzy similarity measurement reasoning with orientation[J]. China Communications, 2014, 11(6): 119–128. doi: 10.1109/CC.2014.6879010[38] 王小艺, 刘载文, 侯朝桢, 等. 基于模糊多属性决策的目标威胁估计方法[J]. 控制与决策, 2007, 22(8): 859–863. doi: 10.3321/j.issn:1001-0920.2007.08.004WANG Xiaoyi, LIU Zaiwen, HOU Chaozhen, et al. Method of object threat assessment based on fuzzy MADM[J]. Control and Decision, 2007, 22(8): 859–863. doi: 10.3321/j.issn:1001-0920.2007.08.004[39] GRANSTRÖM K, FATEMI M, and SVENSSON L. Gamma Gaussian inverse-Wishart Poisson multi-Bernoulli filter for extended target tracking[C]. 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 2016: 893–900.[40] 连峰, 马冬冬, 元向辉, 等. 扩展目标CBMeMBer滤波器及其高斯混合实现[J]. 控制与决策, 2015, 30(4): 611–616. doi: 10.13195/j.kzyjc.2014.0286LIAN Feng, MA Dongdong, YUAN Xianghui, et al. CBMeMBer filter for extended targets and its Gaussian mixture implementations[J]. Control and Decision, 2015, 30(4): 611–616. doi: 10.13195/j.kzyjc.2014.0286[41] GOSTAR A K, HOSEINNEZHAD R, BAB-HADIASHAR A, et al. Sensor-management for multitarget filters via minimization of posterior dispersion[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 2877–2884. doi: 10.1109/TAES.2017.2718280[42] RAHMATHULLAH A S, GARCÍA-FERNÁNDEZ Á F, and SVENSSON L. Generalized optimal sub-pattern assignment metric[C]. 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 2017: 1–8.[43] LUNDQUIST C, GRANSTRÖM K, and ORGUNER U. An extended target CPHD filter and a gamma Gaussian inverse Wishart implementation[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 472–483. doi: 10.1109/JSTSP.2013.2245632 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

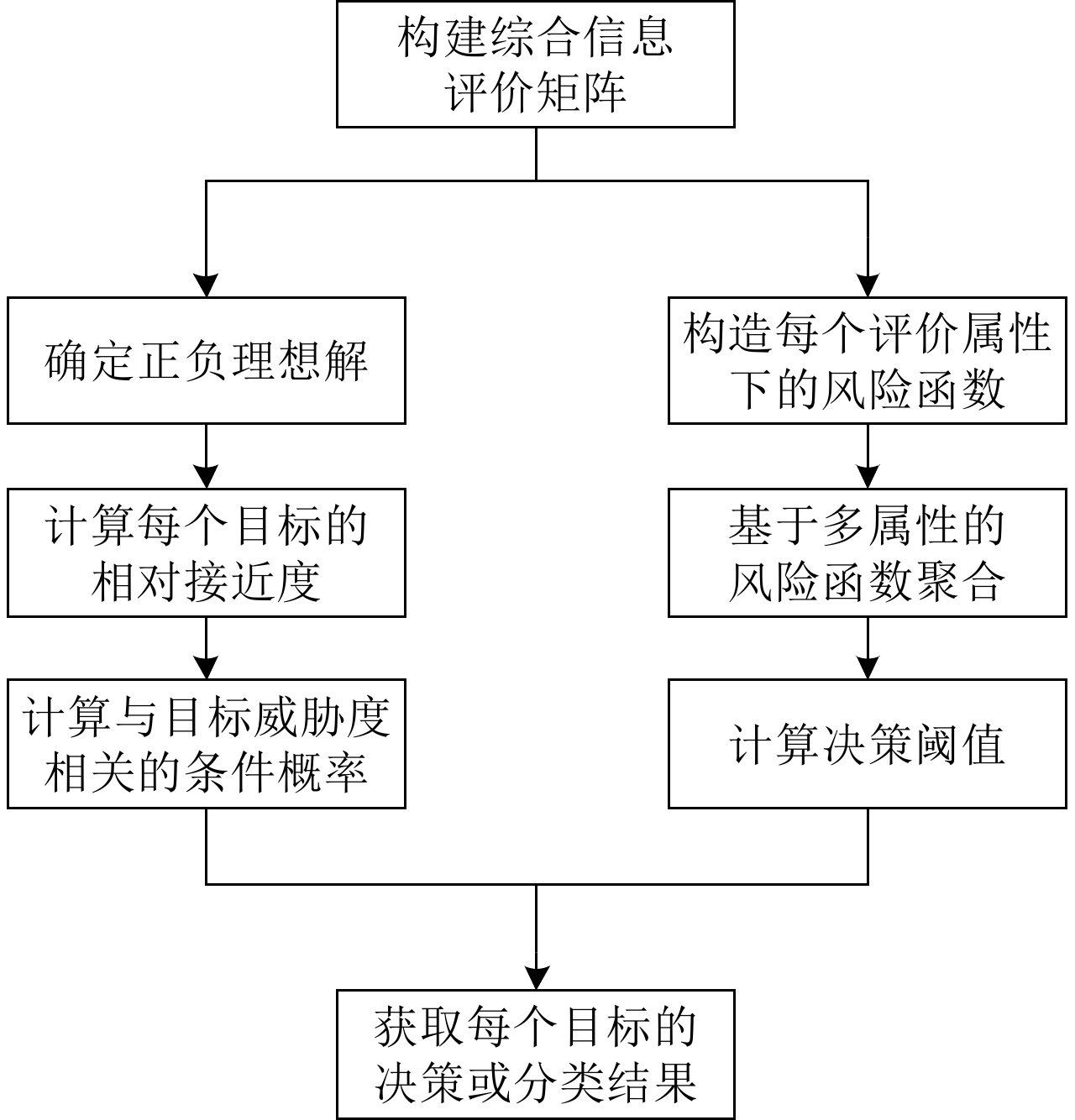
- Figure 1. Target threat assessment process
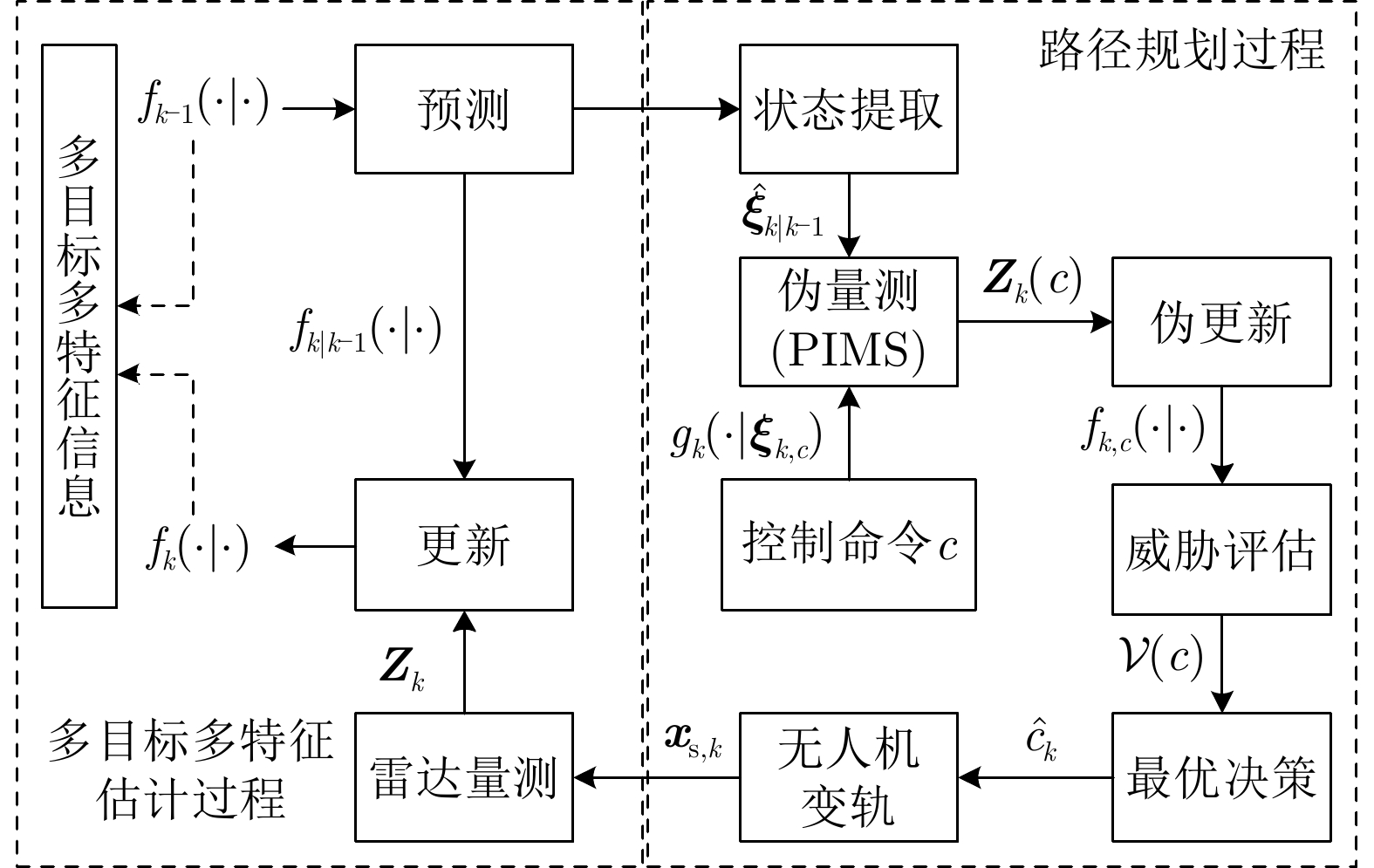
- Figure 2. Basic schematic diagram of path planning
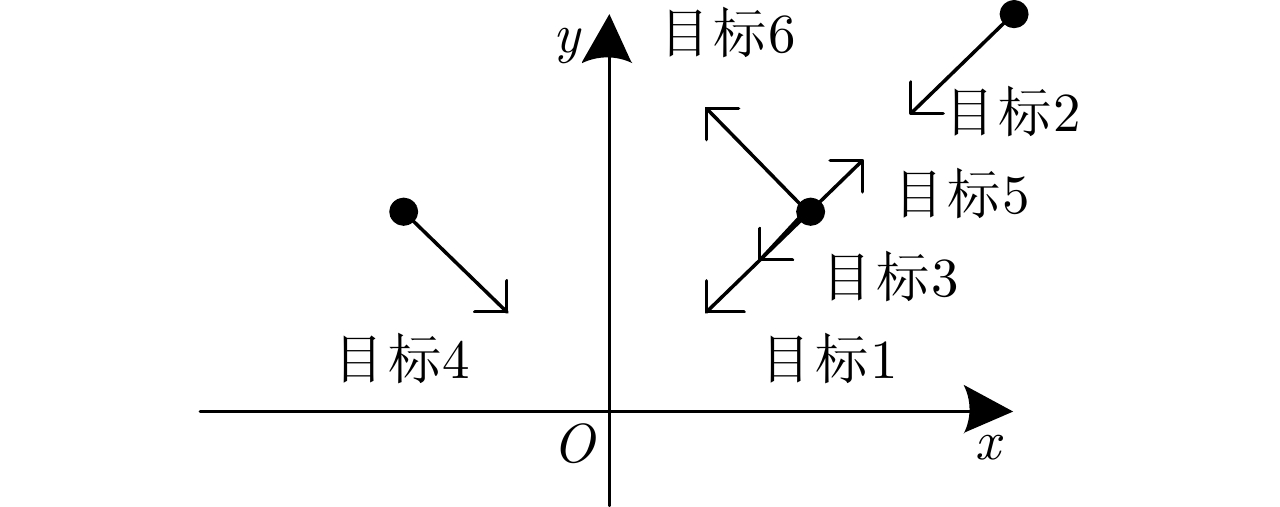
- Figure 3. Target status diagram
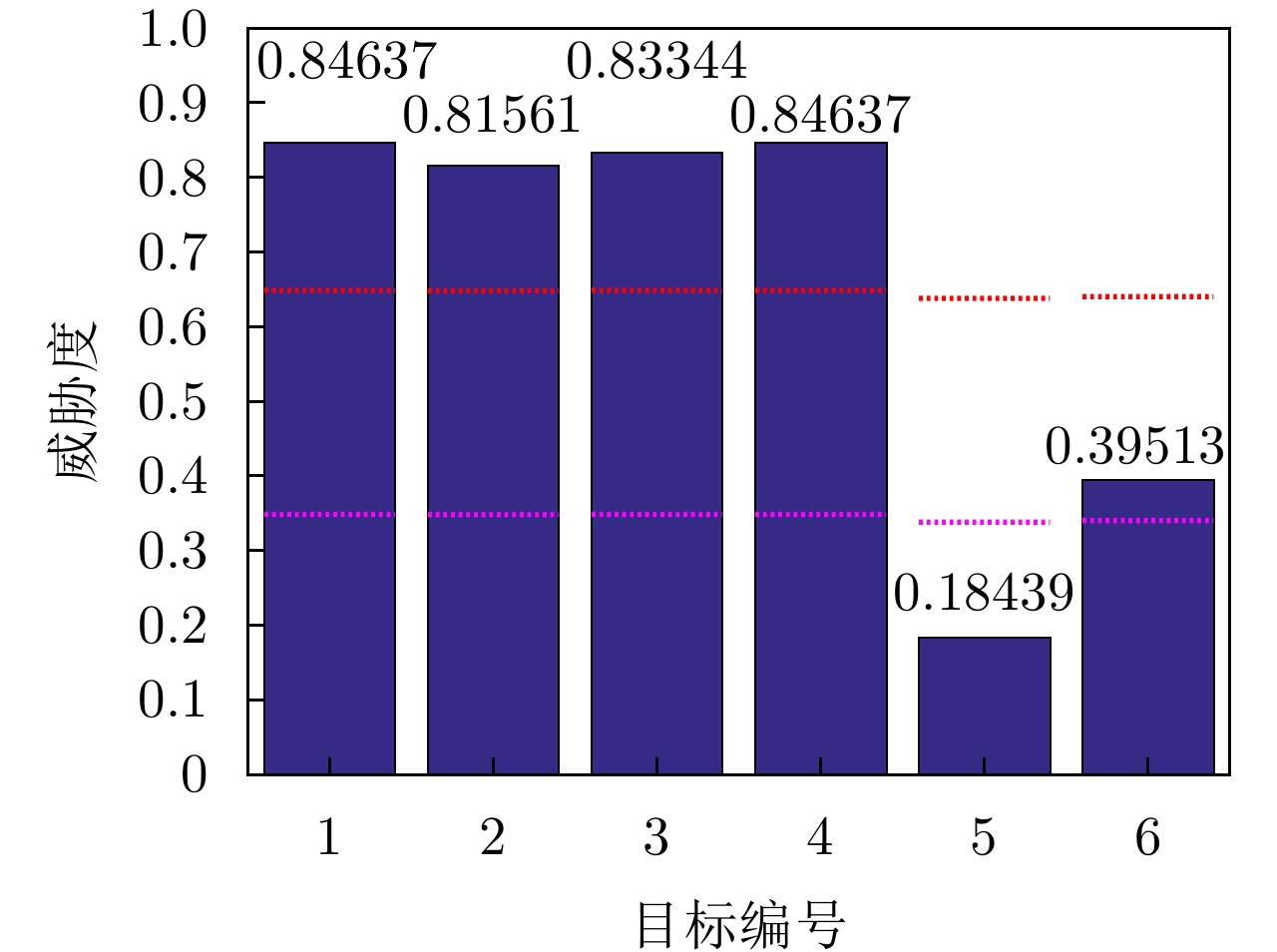
- Figure 4. Target threat assessment
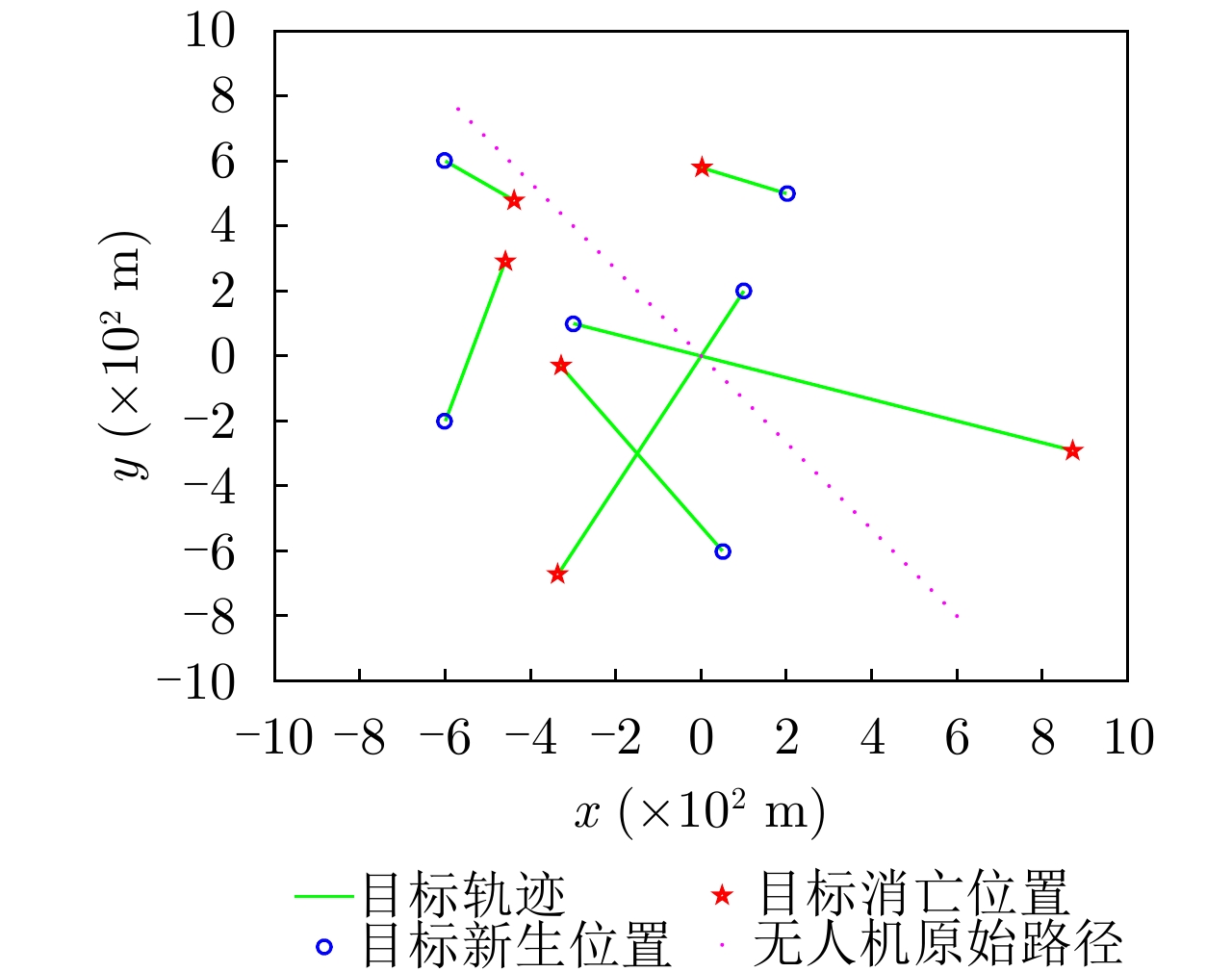
- Figure 5. Actual target trajectory and UAV original trajectory
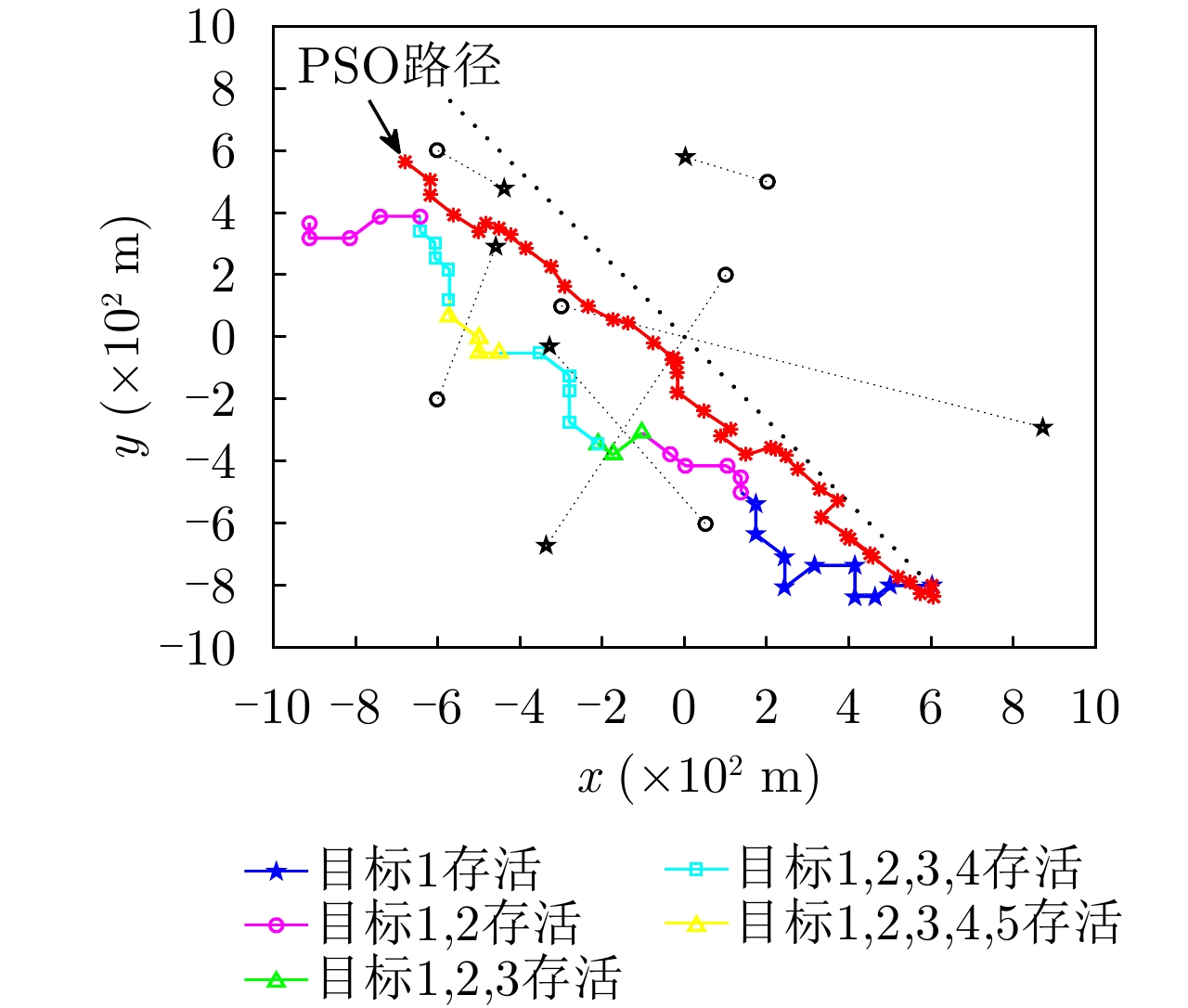
- Figure 6. UAV track crossing enemy occupied area
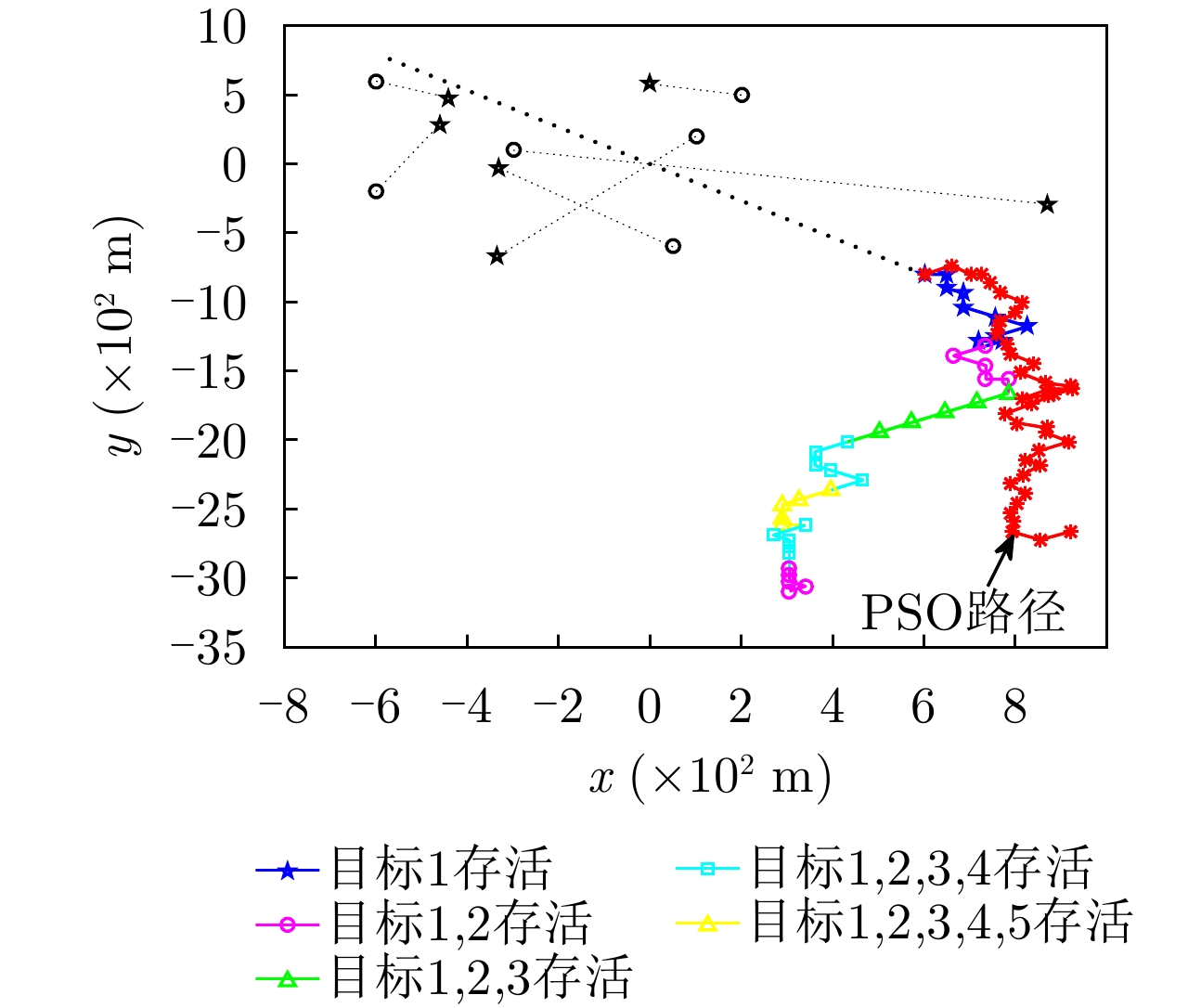
- Figure 7. Fully self insured UAV trajectory
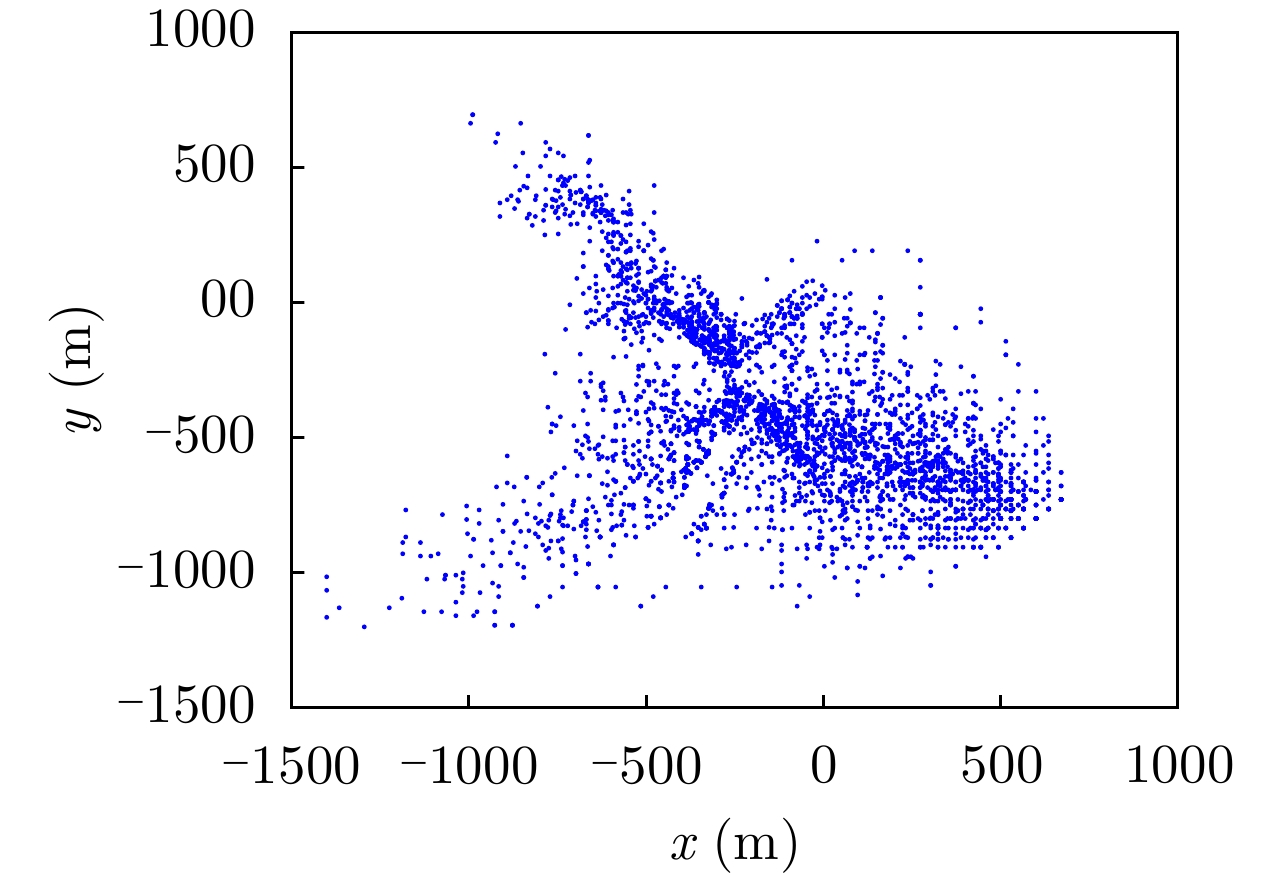
- Figure 8. Trajectory distribution of UAV crossing enemy occupied area in MC experiment
- Figure 9. Trajectory distribution of fully self protected UAV in MC experiment
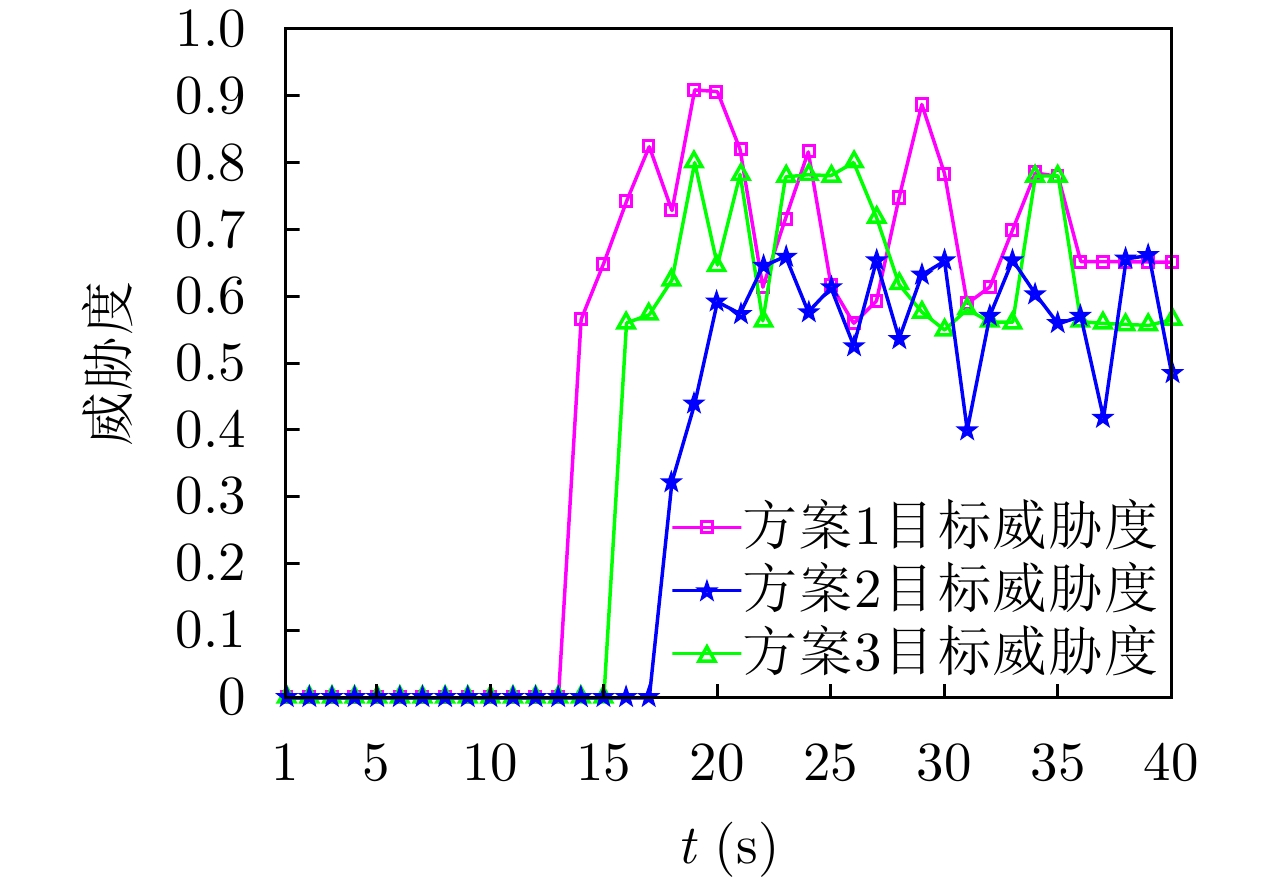
- Figure 10. Statistical mean value of target threat assessment
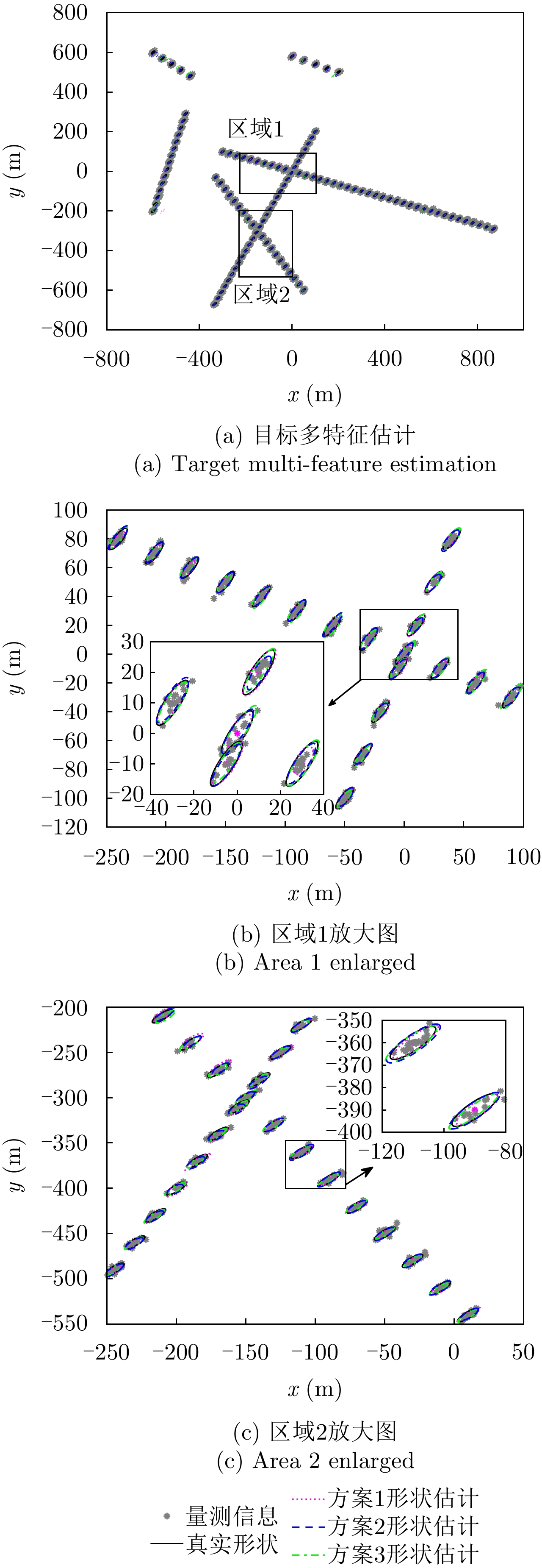
- Figure 11. Multi-extended target tracking rendering
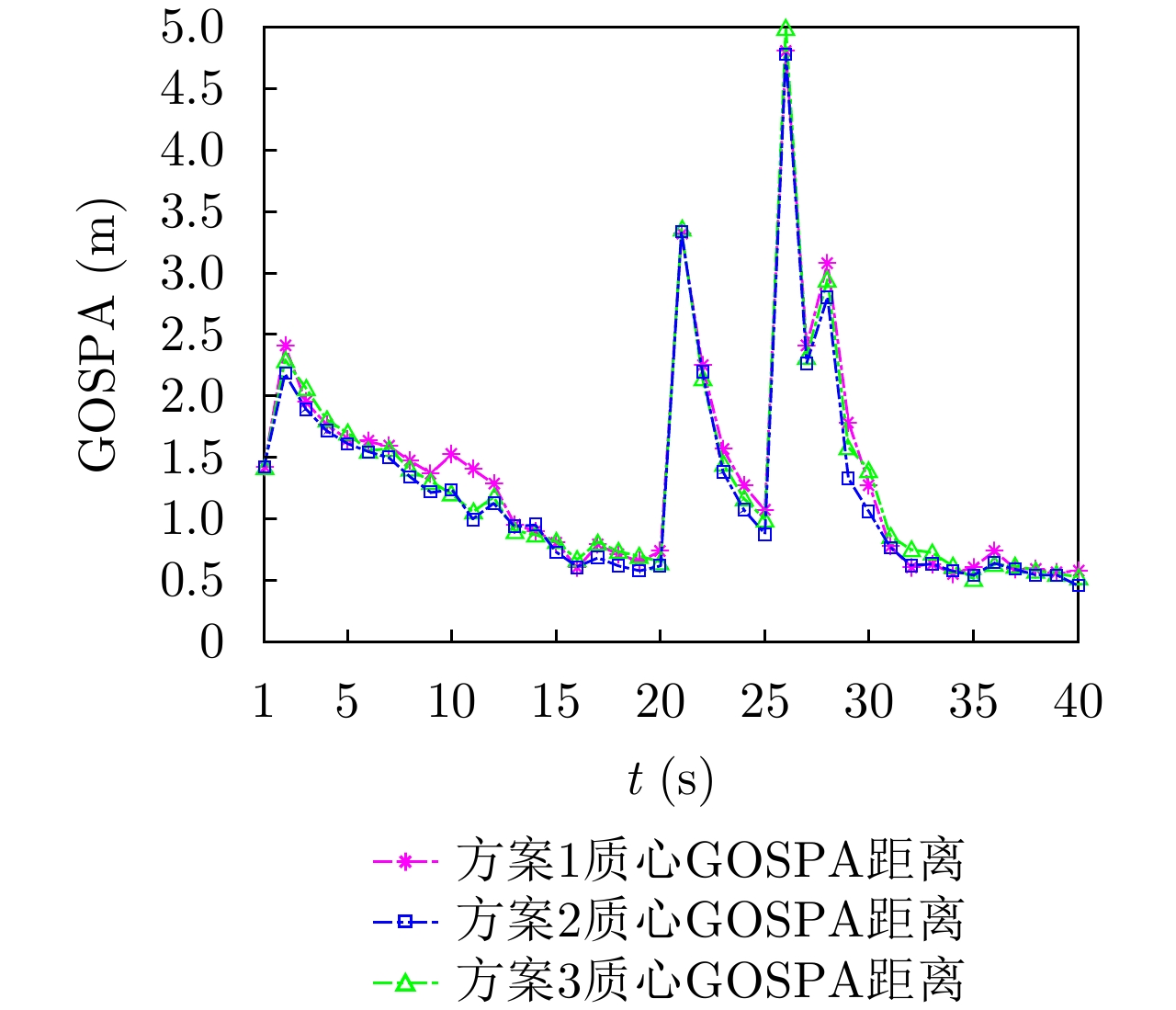
- Figure 12. GOSPA distance statistics of target centroid position
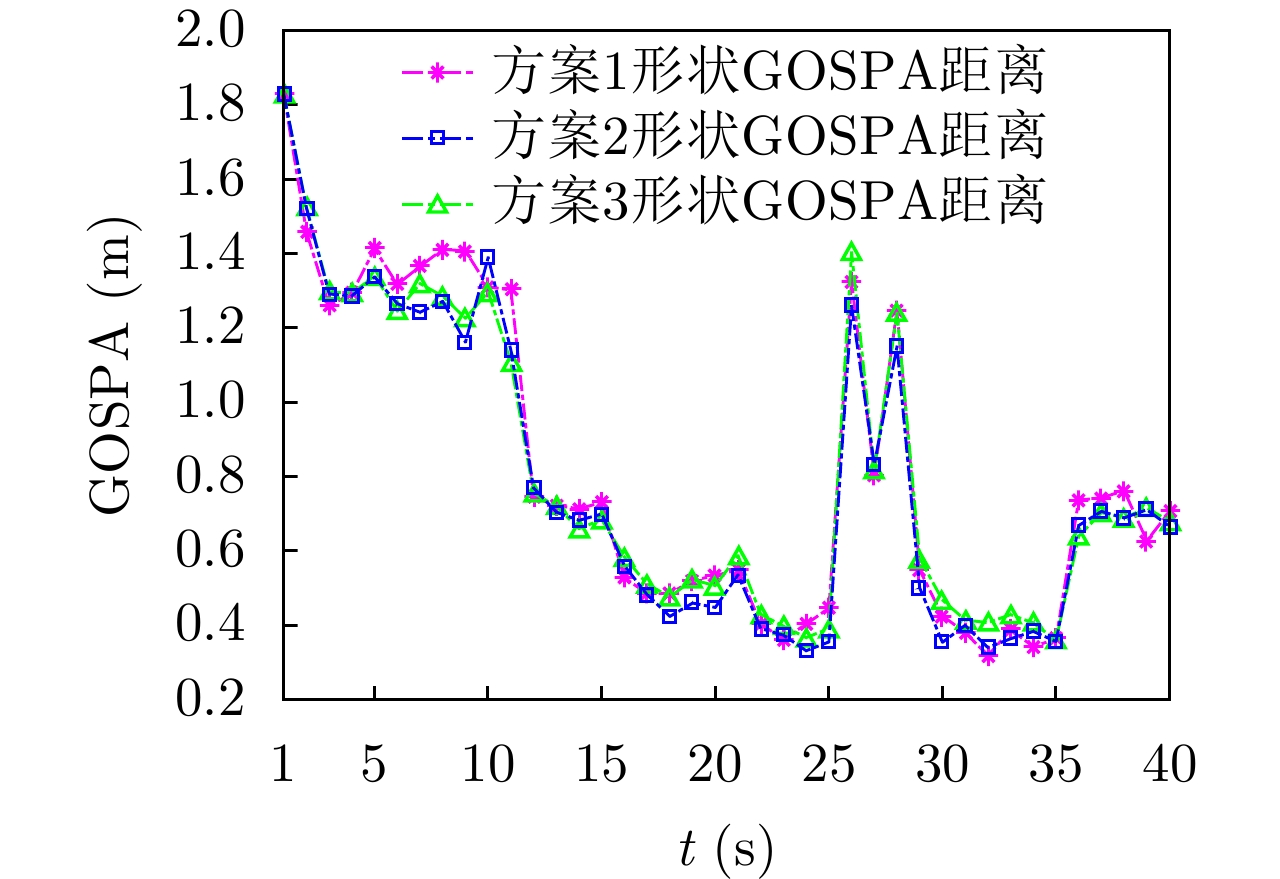
- Figure 13. Target shape (major and minor axes of ellipse) estimation GOSPA distance statistics
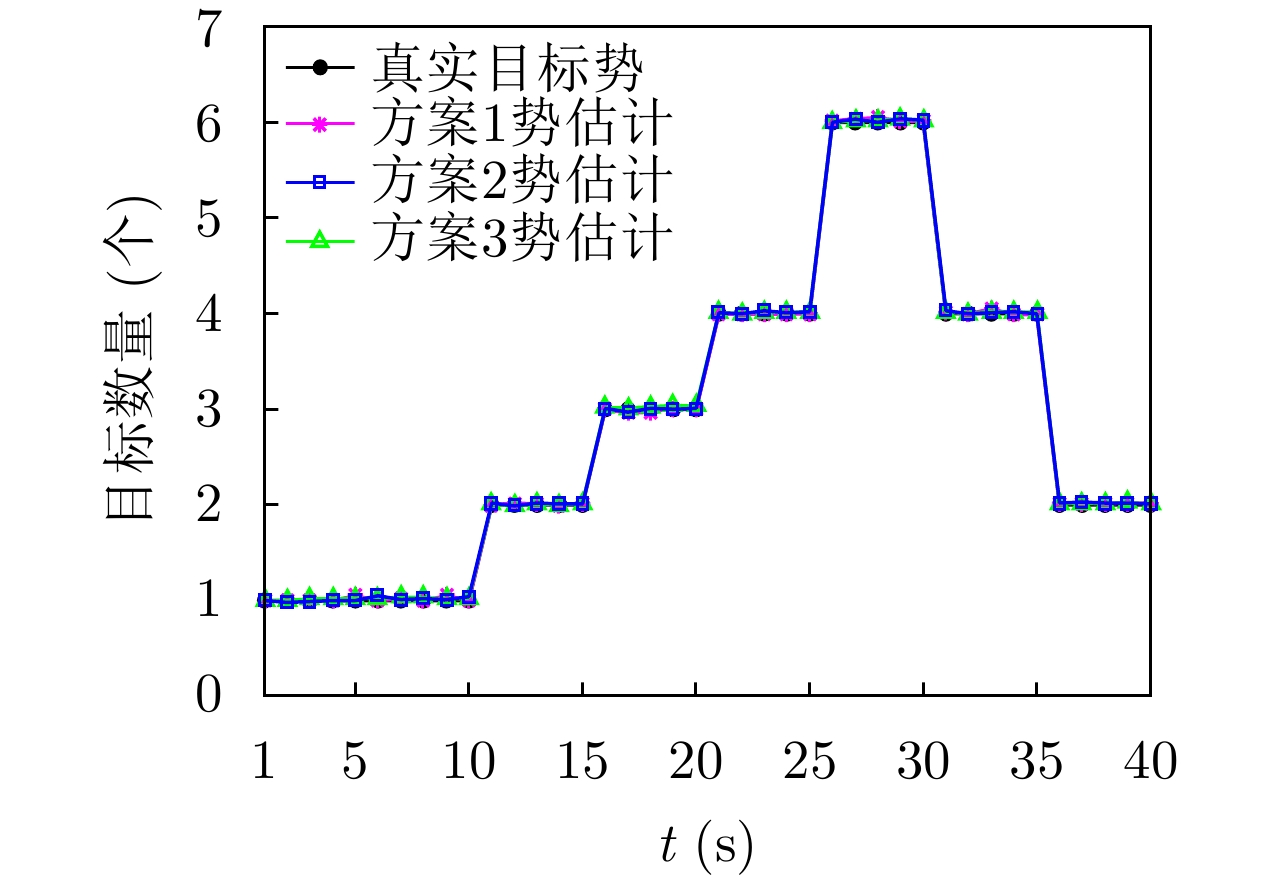
- Figure 14. Multi-objective cardinality estimation