
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | DANG Xiangwei, QIN Fei, BU Xiangxi, et al. A robust perception algorithm based on a radar and LiDAR for intelligent driving[J]. Journal of Radars, 2021, 10(4): 622–631. doi: 10.12000/JR21036

|
A Robust Perception Algorithm Based on a Radar and LiDAR for Intelligent Driving
DOI: 10.12000/JR21036 CSTR: 32380.14.JR21036
More Information-
Abstract
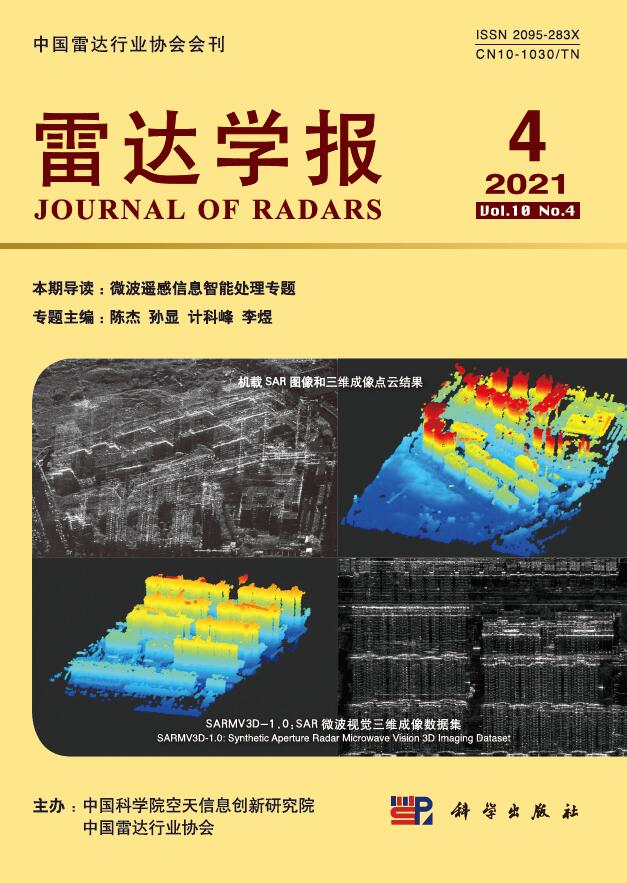
Multi-sensor fusion perception is one of the key technologies to realize intelligent automobile driving, and it has become a hot issue in the field of intelligent driving. However, because of the limited resolution of millimeter-wave radars, the interference of noise, clutter, and multipath, and the influence of weather on LiDAR, the existing fusion algorithm cannot easily achieve accurate fusion of the data of two sensors and obtain robust results. To address the problem of accurate and robust perception in intelligent driving, this study proposes a robust perception algorithm that combines millimeter-wave radar and LiDAR. Using a new method of spatial correction based on feature-based two-step registration, the precise spatial synchronization of the 3D LiDAR and 2D radar point clouds is realized. The improved millimeter-wave radar filtering algorithm is used to reduce the influence of noise and multipath on the radar point cloud. Then, according to the novel fusion method proposed in this study, the data of the two sensors are fused to obtain accurate and robust sensing results, which solves the problem of the influence of smoke on LiDAR performance. Finally, we conducted multiple sets of experiments in a real environment to verify the effectiveness and robustness of our method. Even in extreme environments such as smoke, we can still achieve accurate positioning and robust mapping. The environment map established by the fusion method proposed in this study is more accurate than that established by a single sensor. Moreover, the location error obtained can be reduced by at least 50%. -

-
References
[1] 李鑫. 面向汽车智能驾驶的毫米波雷达建模与仿真研究[D]. [博士论文], 吉林大学, 2020.LI Xin. Research on modeling and simulation of millimeter wave radar for vehicle intelligent driving[D]. [Ph. D. dissertation], Jilin University, 2020.[2] 马兴. 无人驾驶汽车中的几种重要传感器应用研究[J]. 数字技术与应用, 2020, 38(5): 107, 109. doi: 10.19695/j.cnki.cn12-1369.2020.05.62MA Xing. Application of several important sensors research on driver-less vehicles[J]. Digital Technology &Application, 2020, 38(5): 107, 109. doi: 10.19695/j.cnki.cn12-1369.2020.05.62[3] 崔巍杰. 毫米波和激光雷达数据融合的SLAM算法研究[D]. [硕士论文], 电子科技大学, 2019.CUI Weijie. SLAM algorithm based on millimeter wave radar and lidar data fusion[D]. [Master dissertation], University of Electronic Science and Technology of China, 2019.[4] YAMAUCHI B. Fusing ultra-wideband radar and lidar for small UGV navigation in all-weather conditions[C]. SPIE 7692, Unmanned Systems Technology XII, Orlando, United States, 2010: 76920O. doi: 10.1117/12.850386.[5] FRITSCHE P, KUEPPERS S, BRIESE G, et al. Radar and LiDAR sensorfusion in low visibility environments[C]. The 13th International Conference on Informatics in Control, Automation and Robotics, Lisbon, Portugal, 2016: 30–36. doi: 10.5220/0005960200300036.[6] FRITSCHE P, KUEPPERS S, BRIESE G, et al. Fusing LiDAR and radar data to perform SLAM in harsh environments[M]. MADANI K, PEAUCELLE D, and GUSIKHIN O. Informatics in Control, Automation and Robotics. Cham: Springer, 2018: 177–189. doi: 10.1007/978-3-319-55011-4_9.[7] FRITSCHE P and WAGNER B. Modeling structure and aerosol concentration with fused radar and LiDAR data in environments with changing visibility[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, 2017: 2685–2690. doi: 10.1109/IROS.2017.8206093.[8] PRITSCHE P, ZEISE B, HEMME P, et al. Fusion of radar, LiDAR and thermal information for hazard detection in low visibility environments[C]. 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 2017: 96–101. doi: 10.1109/SSRR.2017.8088146.[9] MARCK J W, MOHAMOUD A, HOUWEN E V, et al. Indoor radar SLAM a radar application for vision and GPS denied environments[C]. 2013 European Radar Conference, Nuremberg, Germany, 2013: 471–474.[10] PARK Y S, KIM J, and KIM A. Radar localization and mapping for indoor disaster environments via multi-modal registration to prior LiDAR map[C]. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019: 1307–1314. doi: 10.1109/IROS40897.2019.8967633.[11] WANG Xiao, XU Linhai, SUN Hongbin, et al. Bionic vision inspired on-road obstacle detection and tracking using radar and visual information[C]. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 2014: 39–44. doi: 10.1109/ITSC.2014.6957663.[12] ALENCAR F A R, ROSERO L A, FILHO C M, et al. Fast metric tracking by detection system: Radar blob and camera fusion[C]. 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 2015: 120–125. doi: 10.1109/LARS-SBR.2015.59.[13] HAN Siyang, WANG Xiao, XU Linhai, et al. Frontal object perception for Intelligent Vehicles based on radar and camera fusion[C]. 2016 35th Chinese Control Conference (CCC), Chengdu, China, 2016: 4003–4008. doi: 10.1109/ChiCC.2016.7553978.[14] KIM J, HAN D S, and SENOUCI B. Radar and vision sensor fusion for object detection in autonomous vehicle surroundings[C]. 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 2018: 76–78. doi: 10.1109/ICUFN.2018.8436959.[15] HENG L. Automatic targetless extrinsic calibration of multiple 3D LiDARs and radars[C]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, 2020: 10669–10675. doi: 10.1109/IROS45743.2020.9340866.[16] QIN Fei, LIU Yunlong, and LIANG Xingdong. A novel GOSD-CFAR for millimeter wave radar detection[C]. 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2020), Waikoloa, USA, 2020: 1782–1785. doi: 10.1109/IGARSS39084.2020.9324693.[17] CRISTIANINI N, SHAWE-TAYLO J, 李国正, 王猛, 曾华军, 译. 支持向量机导论[M]. 北京: 电子工业出版社, 2004: 82–85.CRISTIANINI N and SHAWE-TAYLO J, LI Guozheng, WANG Meng, and ZENG Huajun. translation. An Introduction to Support Vector Machines and Other Kernel-based Learning Methods[M]. Beijing: Publishing House of Electronics Industry, 2004: 82–85.[18] DANG Xiangwei, RONG Zheng, and LIANG Xingdong. Sensor fusion-based approach to eliminating moving objects for SLAM in dynamic environments[J]. Sensors, 2021, 21(1): 230. doi: 10.3390/s21010230[19] DANG Xiangwei, LIANG Xingdong, LI Yanlei, et al. Moving objects elimination towards enhanced dynamic SLAM fusing LiDAR and mmW-radar[C]. 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 2020: 1–4. doi: 10.1109/ICMIM48759.2020.9298986.[20] ZHANG Ji and SINGH S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2): 401–416. doi: 10.1007/s10514-016-9548-2 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:






- Figure 1. Camera and LiDAR data in a smoky environment
- Figure 2. Block diagram of multi-sensor fusion
- Figure 3. Time synchronization diagram
- Figure 4. Space synchronization flow chart
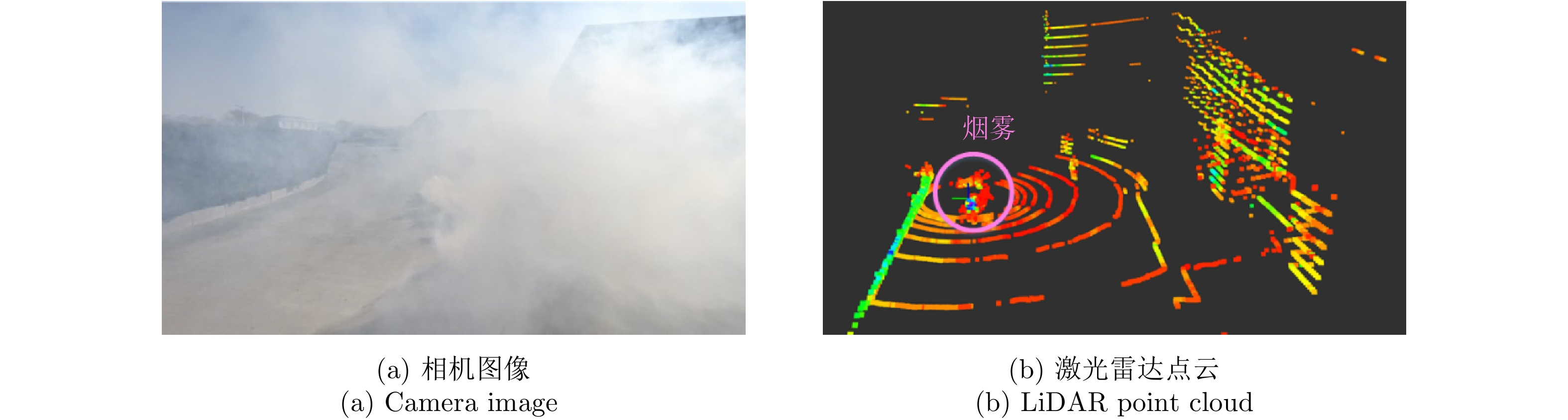
- Figure 5. Multi-sensor spatial calibration results
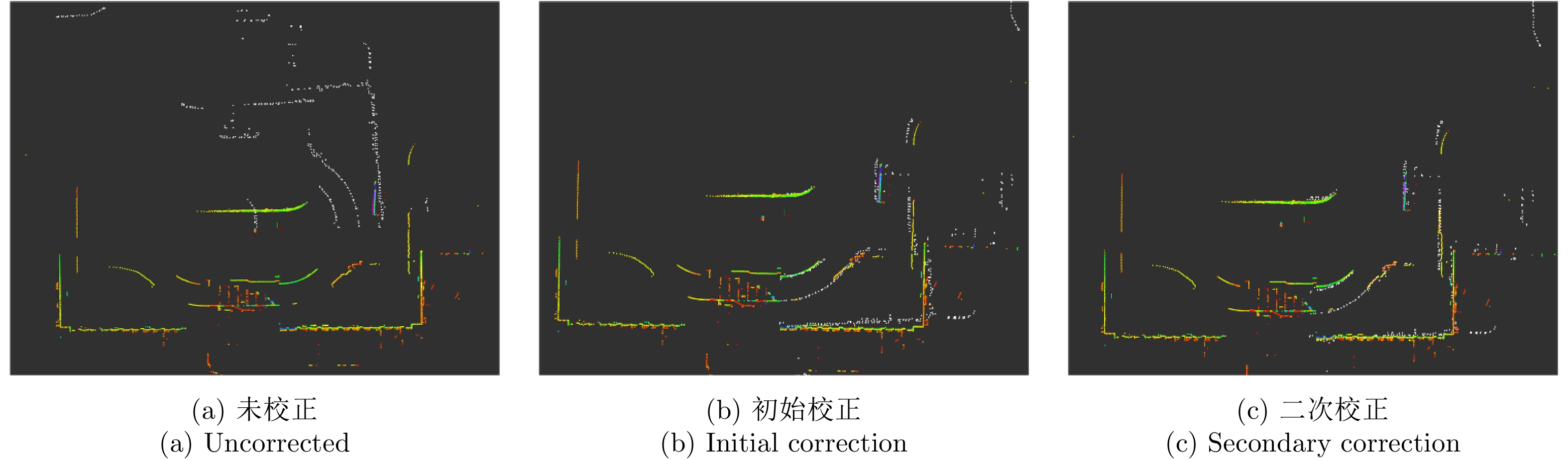
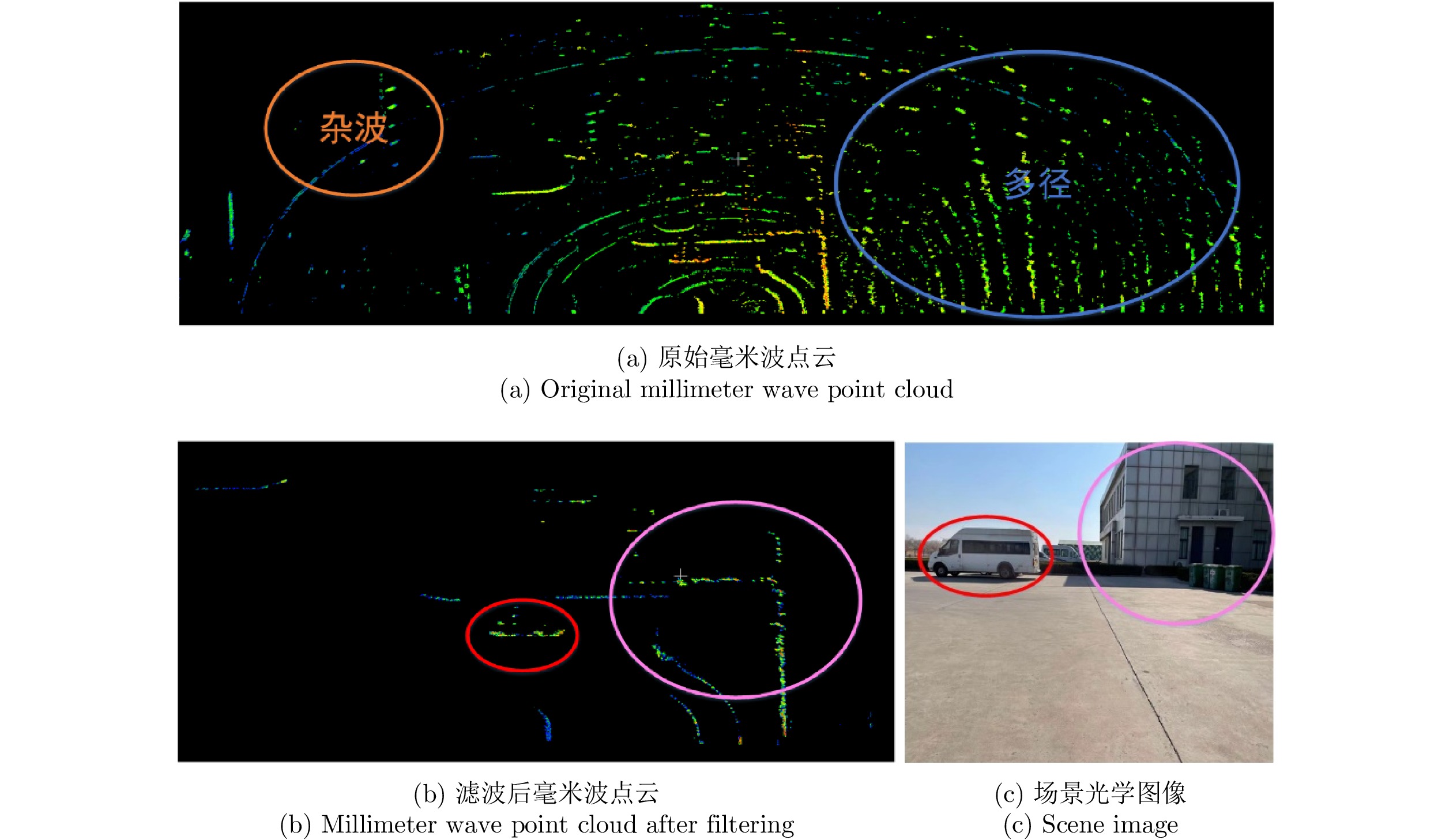
- Figure 6. Millimeter wave radar point cloud filtering results
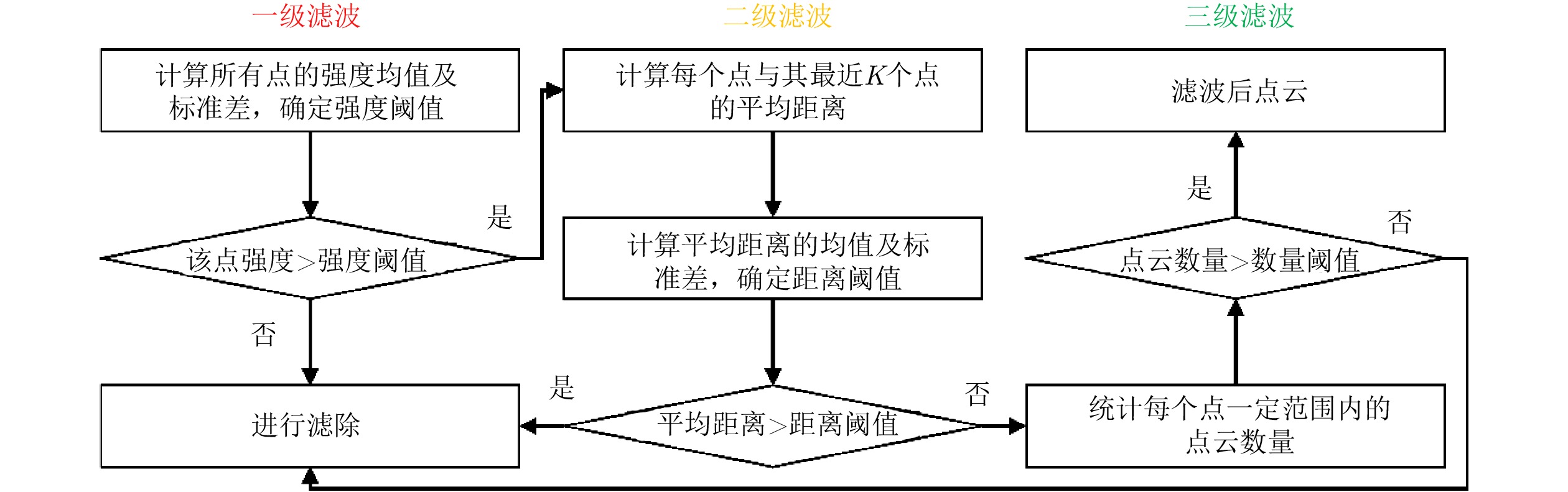
- Figure 7. Three-stage filtering flow chart of millimeter wave radar point cloud
- Figure 8. LiDAR point cloud smoke recognition results
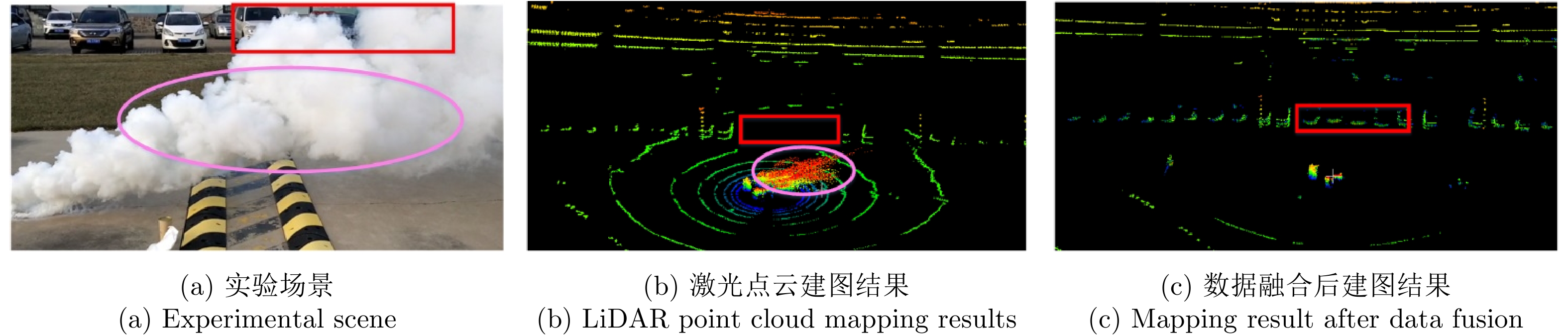
- Figure 9. Experimental results in smoky environment
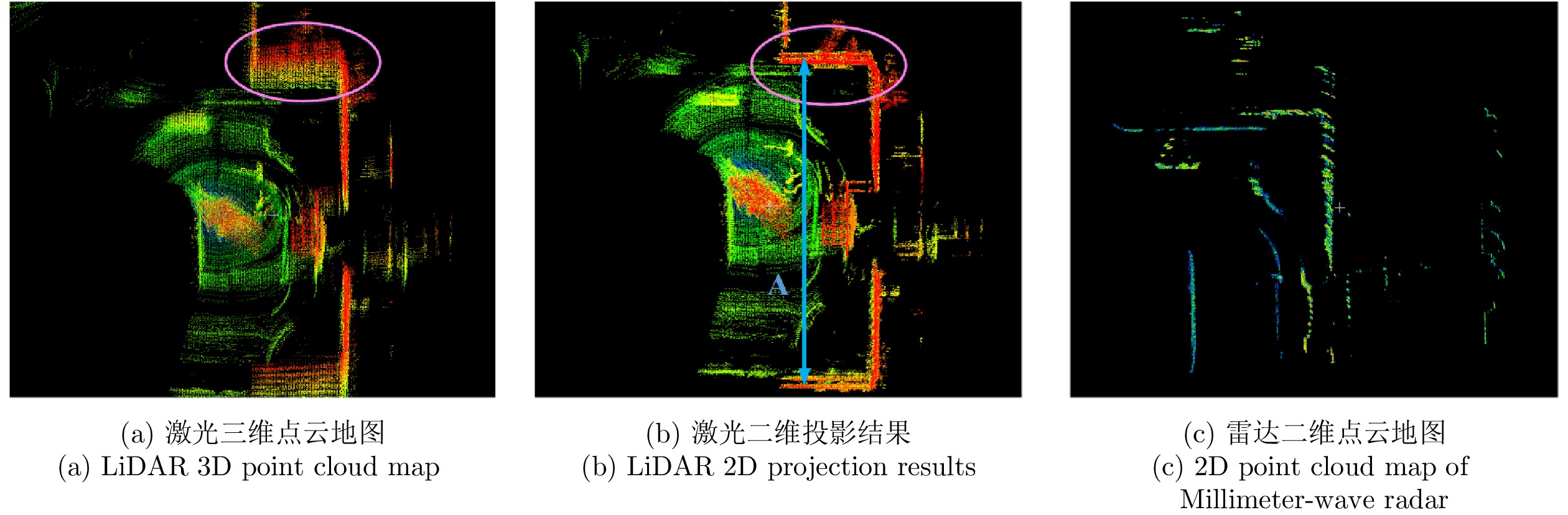
- Figure 10. The mapping results based on LiDAR and millimeter-wave radar
- Figure 11. Multi-sensor data fusion results in a smog environment
- Figure 12. Mapping results after sensor data fusion
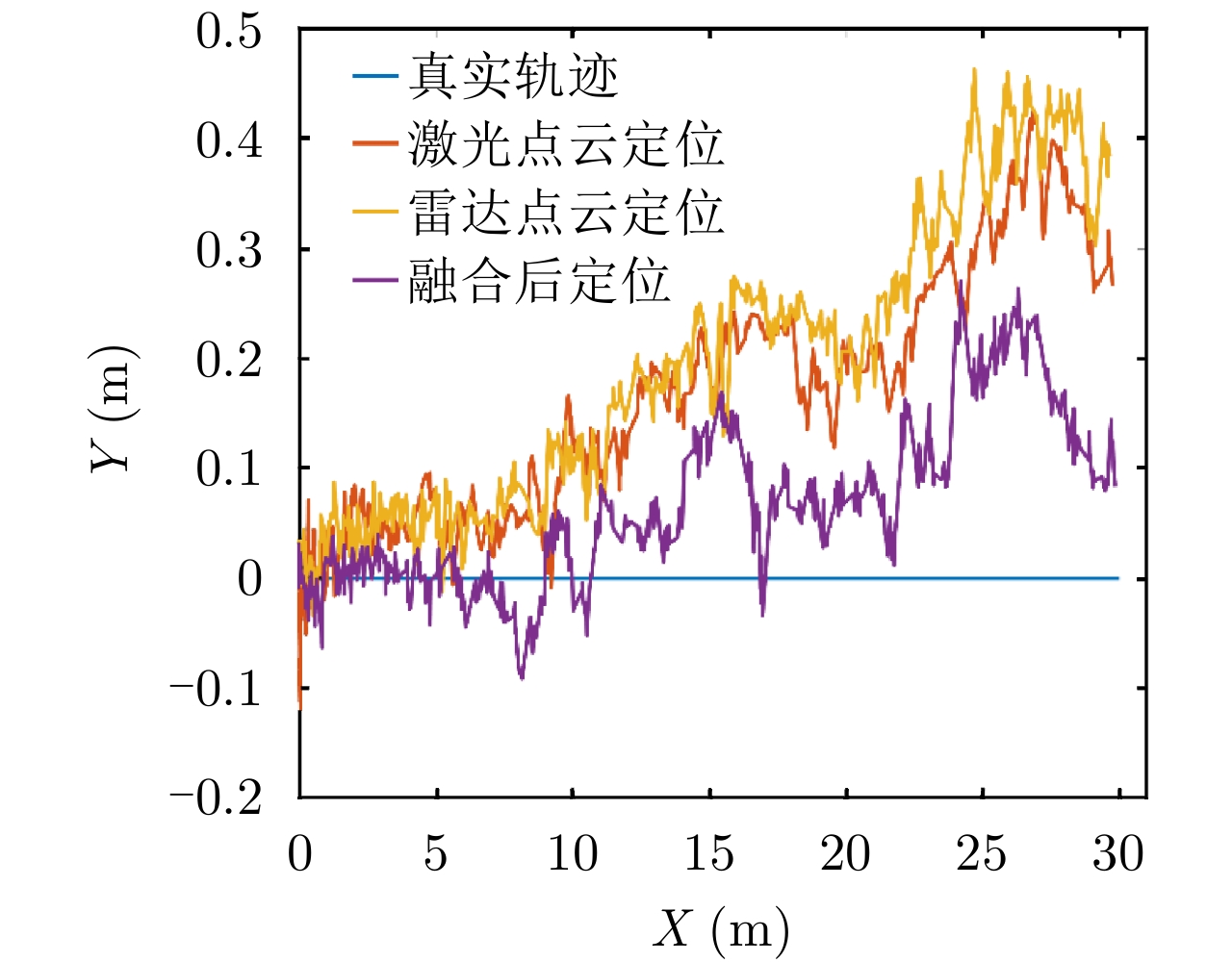
- Figure 13. The localization results using different sensor data