
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | 
|
Multi-frame Track Before Detect Method for the Netted Radar System
DOI: 10.12000/JR18092 CSTR: 32380.14.JR18092
More Information-
Abstract
Recently, Netted Radar System (NRS) has received much attention due to its robust performance gain. Usually, the NRS Detect Before Track (DBT) method detects the received data at each time, acquiring a set of alarm plots, and then transmits these plots or the trajectories obtained based on them to the fusion center, thus generating a global estimated result. However, when the Signal-to-Noise Ratio (SNR) is low, the performance becomes highly degraded because the targets cannot pass the single-frame detection threshold of DBT. To solve this problem, a netted radar Multi-Frame Track Before Detect (MF-TBD) method is proposed in this paper. First, MF-TBD is performed in local radar nodes, and then it acquires estimated target plot sequences and transmits them to the center for further fusion. MF-TBD can take advantage of NRS, and also can utilize target space time correlation through MF-TBD processing and enhance the target SNR. Thus, it can improve detection performance. However, the outputs of MF-TBD are different from that of DBT. Therefore, the current fusion methods for DBT are not suitable for MF-TBD. To solve this problem, this paper first derives a fusion method for plot sequences, then reports its processing steps in radar system, and finally proposes an implementation method based on the particle filter. The simulation results show that the proposed method has a detection performance gain of 4 to 6 dB than the traditional method based on DBT, and a 50% gain on estimation accuracy than single-sensor MF-TBD. -

-
References
[1] LUO R C, YIH C C, and SU K L. Multisensor fusion and integration: Approaches, applications, and future research directions[J]. IEEE Sensors Journal, 2002, 2(2): 107–119. doi: 10.1109/JSEN.2002.1000251[2] BAR-SHALOM Y, WILLETT P K, and TIAN Xin. Tracking and Data Fusion[M]. Storrs: YBS Publishing, 2011.[3] UHLMANN J K. General data fusion for estimates with unknown cross covariances[C]. Proceedings of SPIE 2755, Signal Processing, Sensor Fusion, and Target Recognition V, Orlando, FL, USA, 1996: 536–548.[4] WANG Yimin and LI X R. Distributed estimation fusion with unavailable cross-correlation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 259–278. doi: 10.1109/TAES.2012.6129634[5] HLINKA O, SLUCIAK O, HLAWATSCH F, et al. Likelihood consensus and its application to distributed particle filtering[J]. IEEE Transactions on Signal Processing, 2012, 60(8): 4334–4349. doi: 10.1109/TSP.2012.2196697[6] MAHLER R P S. Optimal/robust distributed data fusion: A unified approach[C]. Proceedings of SPIE 4052, Signal Processing, Sensor Fusion, and Target Recognition IX, Orlando, FL, USA, 2000: 128–138.[7] 孟藏珍, 袁定波, 许稼, 等. 基于神经网络分类的异类传感器目标关联算法[J]. 雷达学报, 2012, 1(4): 399–405. doi: 10.3724/SP.J.1300.2012.20087MENG Cangzhen, YUAN Dingbo, XU Jia, et al. A new target-correlation algorithm for heterogeneous sensors based on neural network classification[J]. Journal of Radars, 2012, 1(4): 399–405. doi: 10.3724/SP.J.1300.2012.20087[8] BATTISTELLI G, CHISCI L, FANTACCI C, et al. Consensus CPHD filter for distributed multitarget tracking[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 508–520. doi: 10.1109/JSTSP.2013.2250911[9] GUO Yunfei, ZENG Zebing, and ZHAO Shangyu. An amplitude association dynamic programming TBD algorithm with multistatic radar[C]. Proceedings of the 2016 35th Chinese Control Conference, Chengdu, China, 2016: 5076–5079.[10] GU Wenkun, WANG Dangwei, MA Xiaoyan, et al. Distributed OFDM-MIMO radar track-before-detect based on second order target state model[C]. Proceedings of 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 2016: 667–671.[11] 冯存前, 李靖卿, 贺思三, 等. 组网雷达中弹道目标微动特征提取与识别综述[J]. 雷达学报, 2015, 4(6): 609–620. doi: 10.12000/JR15084FENG Cunqian, LI Jingqing, HE Sisan, et al. Micro-Doppler feature extraction and recognition based on netted radar for ballistic targets[J]. Journal of Radars, 2015, 4(6): 609–620. doi: 10.12000/JR15084[12] BUZZI S, LOPS M, VENTURINO L, et al. Track-before-detect procedures in a multi-target environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1135–1150. doi: 10.1109/TAES.2008.4655369[13] GROSSI E, LOPS M, and VENTURINO L. Track-before-detect for multiframe detection with censored observations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(3): 2032–2046. doi: 10.1109/TAES.2013.130148[14] WANG Jinghe, YI Wei, KIRUBARAJAN T, et al. An efficient recursive multiframe track-before-detect algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(1): 190–204. doi: 10.1109/TAES.2017.2741898[15] WANG Jinghe, YI Wei, and KONG Lingjiang. Moving target detection in MIMO radar with asynchronous data[C]. Proceedings of the 2016 19th International Conference on Information Fusion, Heidelberg, Germany, 2016: 1647–1652.[16] WANG Jinghe, YI Wei, KONG Lingjiang, et al. Multi-sensor multi-frame detection based on posterior probability density fusion[C]. Proceedings of the 2018 21st International Conference on Information Fusion, Cambridge, UK, 2018: 1–6.[17] WANG Jinghe, YI Wei, and KONG Lingjiang. Multi-sensor DP-TBD based on approximation of likelihood functions[C]. Proceedings of the 2017 20th International Conference on Information Fusion, Xi’an, China, 2017: 1–6.[18] LIU Rui, YI Wei, CUI Guolong, et al. Particle filtering for target tracking using plot-sequences of multi-frame track before detect[C]. Proceedings of 2015 IEEE Radar Conference, Arlington, USA, 2015: 495–500.[19] WANG Jinghe, YI Wei, KONG Lingjiang, et al. Multi-frame detection method for distributed radar network[C]. Proceedings of 2018 IEEE Radar Conference, Oklahoma City, USA, 2018: 880–884.[20] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174–188. doi: 10.1109/78.978374[21] 吴孙勇, 薛秋条, 朱圣棋, 等. 杂波环境下基于粒子滤波的微弱扩展目标检测前跟踪算法[J]. 雷达学报, 2017, 6(3): 252–258. doi: 10.12000/JR16128WU Sunyong, XUE Qiutiao, ZHU Shengqi, et al. Track-before-detect algorithm for weak extended target based on particle filter under clutter environment[J]. Journal of Radars, 2017, 6(3): 252–258. doi: 10.12000/JR16128 -
Proportional views


- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:



- Figure 1. Block diagram of PSF-MF-TBD
- Figure 2. Steps of PSF-MF-TBD
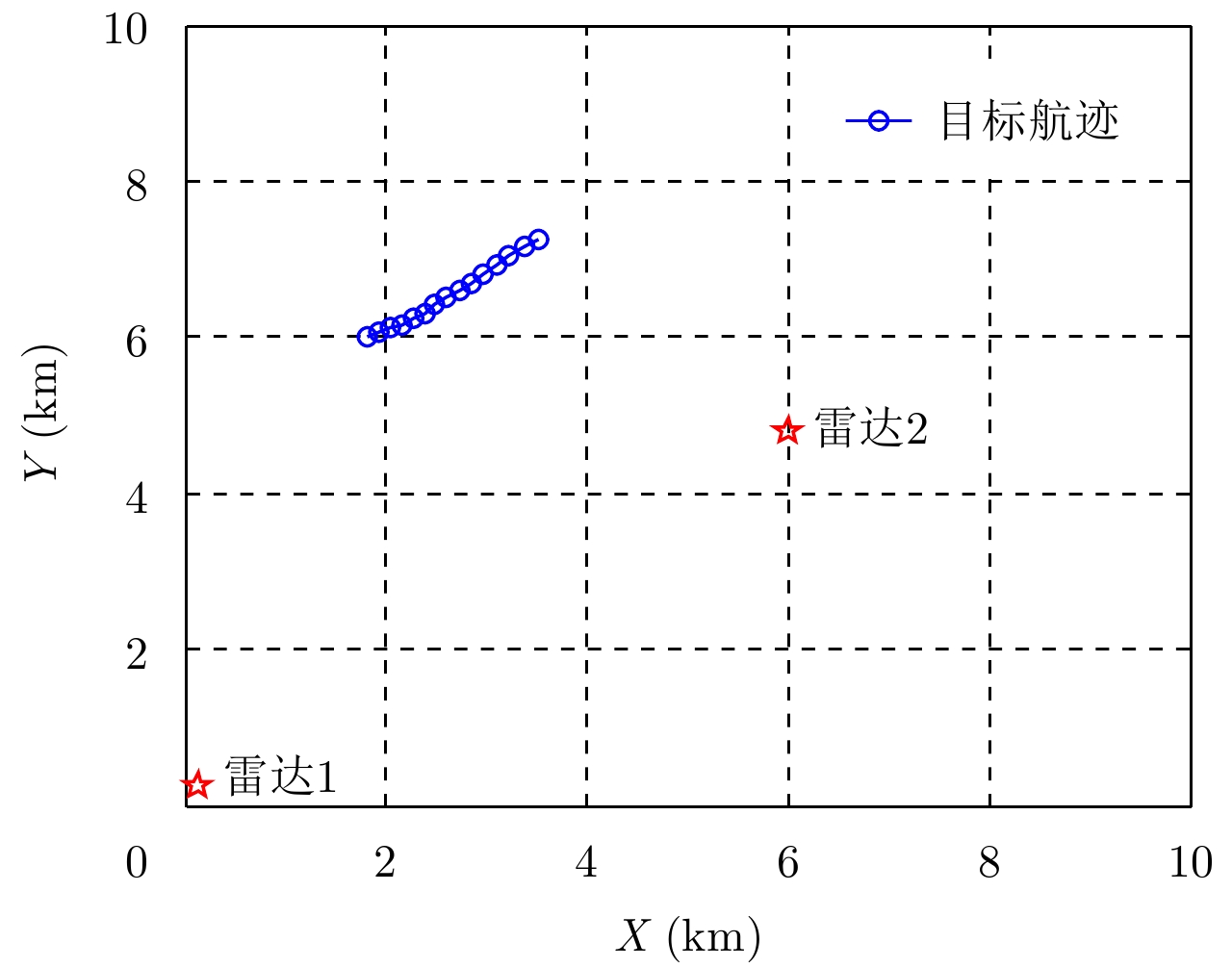
- Figure 3. Sketch map of the simulation scenario
- Figure 4.
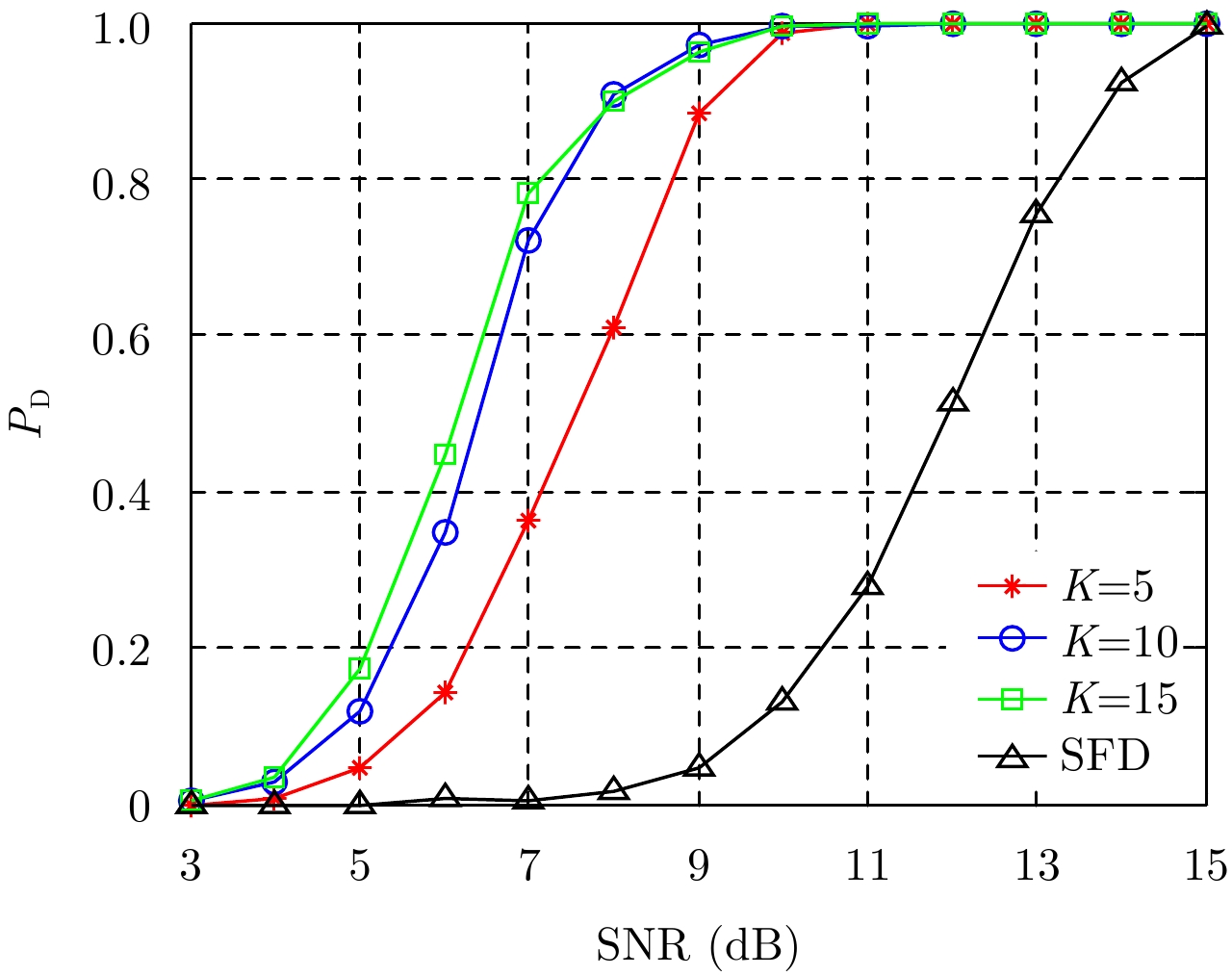
- Figure 5. Detection probability of MF-TBD and SFD for different SNR
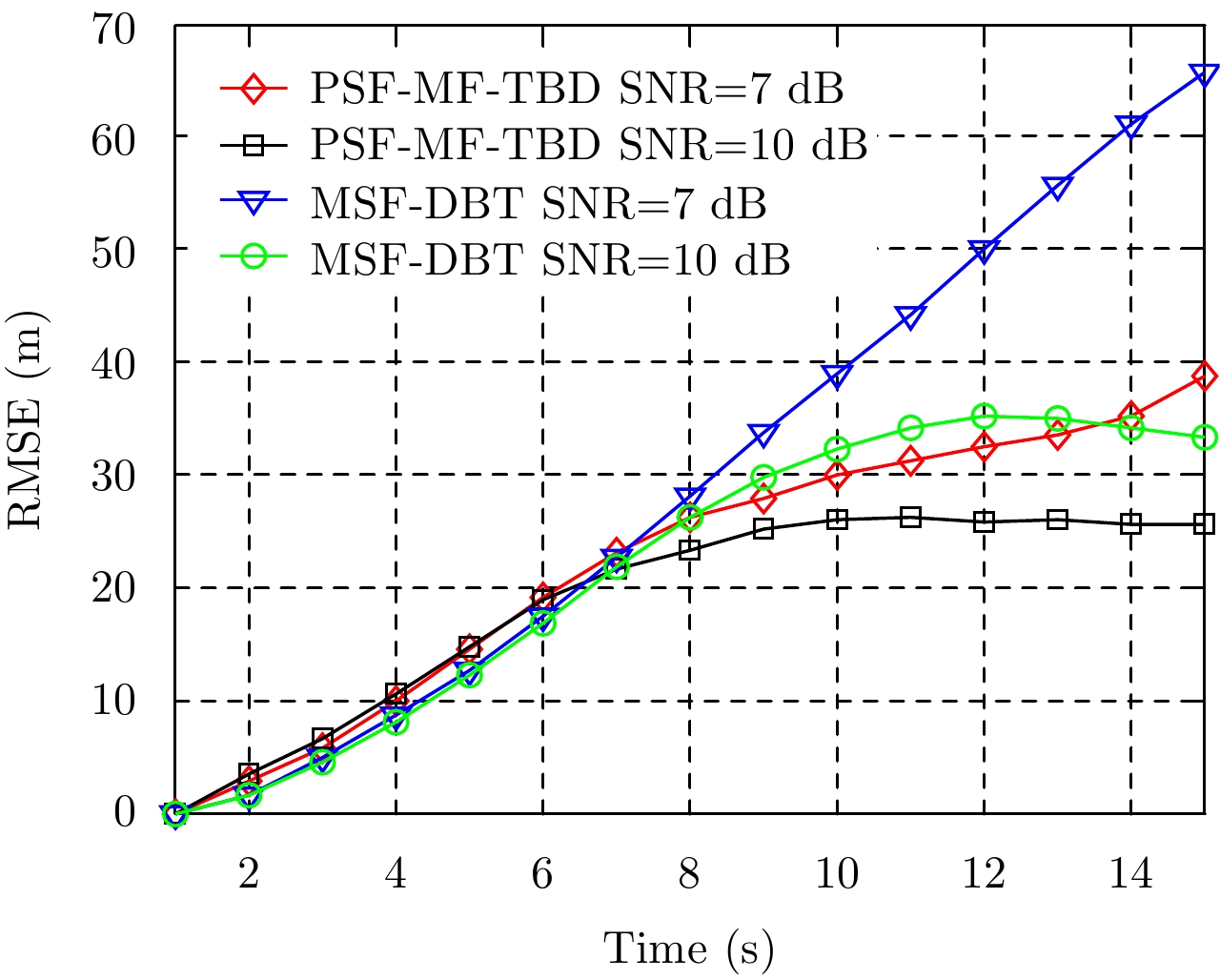
- Figure 6. RMSE of PSF-MF-TBD and MSF-DBT
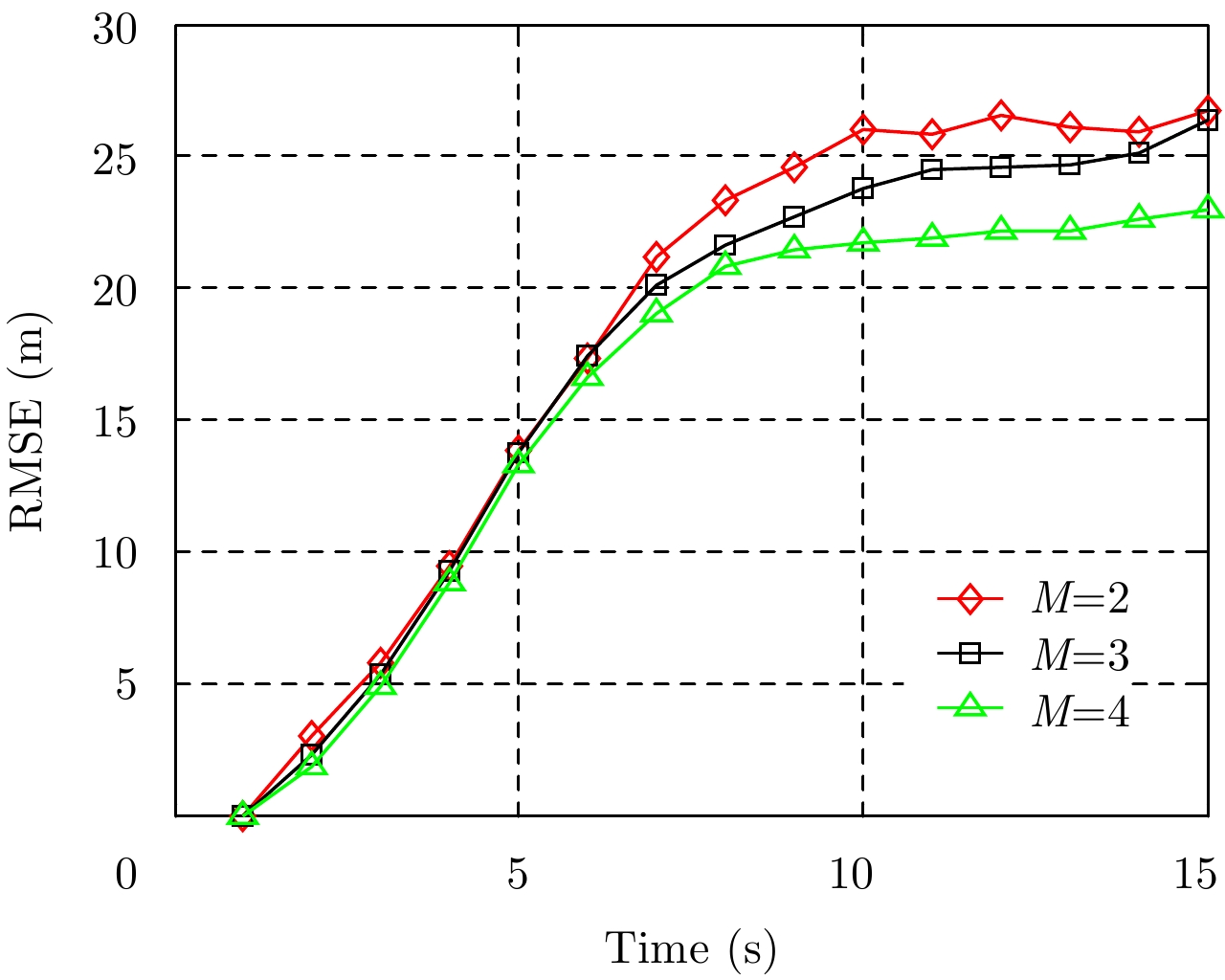
- Figure 7. RMSE of PSF-MF-TBD under different number of radar nodes
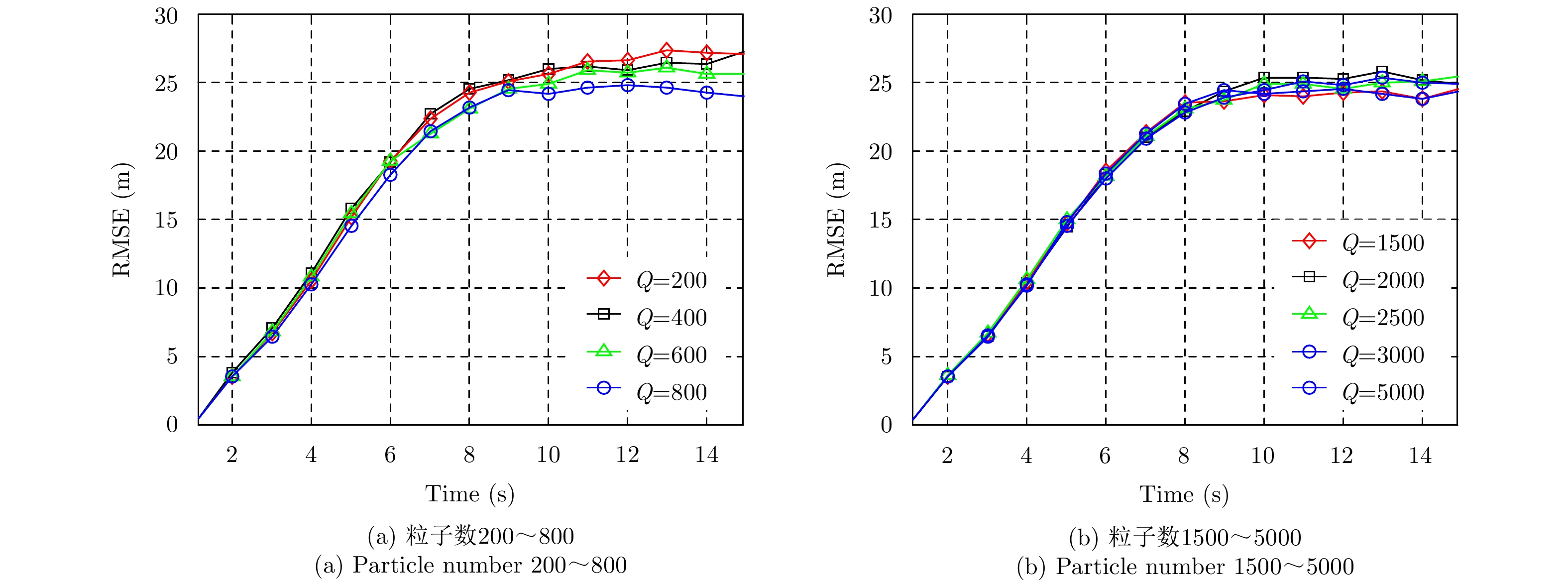
- Figure 8. RMSE of PSF-MF-TBD under different number of particle
- Figure 9. RMSE of different plot sequence fusion methods