
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Wu Yufeng, Ye Shaohua, Feng Dazheng. Intra-pulse Spotlight SAR Imaging Method Based on Azimuth Phase Coding[J]. Journal of Radars, 2018, 7(4): 437-445. doi: 10.12000/JR17114

|
Intra-pulse Spotlight SAR Imaging Method Based on Azimuth Phase Coding
DOI: 10.12000/JR17114 CSTR: 32380.14.JR17114
-
Abstract
The intra-pulse spotlight imaging mode can effectively overcome the contradiction between high resolution and wide swath in spaceborne Synthetic Aperture Radar (SAR), and considers the echo’s signal-to-noise ratio. However, signal division by spatial filtering along the range direction may be impacted by fluctuating terrain. To solve this problem, a novel intra-pulse spotlight imaging method based on Azimuth Phase Coding (APC) is proposed in this paper. Using APC, the azimuth spectrum of echo data from different sub-pulses will locate in different Pulse Repetition Frequencies (PRF). As such, the signal can be divided using an azimuth adaptive beamforming technique. The signal separation method and selection of the shift factor are discussed in detail. Finally, simulation results demonstrate the effectiveness of the proposed method. -

-
References
[1] Freeman A, Johnson W T K, Huneycutt B, et al. The " Myth” of the minimum SAR antenna area constraint[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(1): 320–324. DOI: 10.1109/36.823926[2] Fan B, Qin Y L, You P, et al. An improved PFA with aperture accommodation for widefield spotlight SAR imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(1): 3–7. DOI: 10.1109/LGRS.2014.2322858[3] Wu Y, Sun G C, Yang C, et al. Processing of very high resolution spaceborne sliding spotlight SAR data using velocity scaling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(3): 1505–1518. DOI: 10.1109/TGRS.2015.2481923[4] Li N, Wang R, Deng Y K, et al. Improved full-aperture ScanSAR imaging algorithm based on aperture interpolation[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(5): 1101–1105. DOI: 10.1109/LGRS.2014.2384594[5] Meta A, Mittermayer J, Prats P, et al. TOPS imaging with TerraSAR-X: Mode design and performance analysis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(2): 759–769. DOI: 10.1109/TGRS.2009.2026743[6] Callaghan G D and Longstaff I D. Wide-swath space-borne SAR and range ambiguity[C]. Radar 97, Edinburgh, UK, 1997: 248–252[7] 李杨, 黄杰文, 禹卫东. 高分辨率宽测绘带星载SAR距离向DBF处理[J]. 电子与信息学报, 2011, 33(6): 1510–1514. DOI: 10.3724/SP.J.1146.2010.01157Li Yang, Huang Jie-wen, and Yu Wei-dong. Range DBF processing for high-resolution wide-swath spaceborne SAR[J]. Journal of Electronics&Information Technology, 2011, 33(6): 1510–1514. DOI: 10.3724/SP.J.1146.2010.01157[8] Wang W, Wang R, Deng Y K, et al. Improved digital beam-forming approach with scaling function for range multi-channel synthetic aperture radar system[J]. IET Radar,Sonar&Navigation, 2016, 10(2): 379–385.[9] Currie A and Brown M A. Wide-swath SAR[J]. IEE Proceedings F-Radar and Signal Processing, 1992, 139(2): 122–135. DOI: 10.1049/ip-f-2.1992.0016[10] Liu B C and He Y J. Improved DBF algorithm for multichannel high-resolution wide-swath SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(2): 1209–1225. DOI: 10.1109/TGRS.2015.2476496[11] Li X S, Xing M D, Xia X G, et al. Simultaneous stationary scene imaging and ground moving target indication for high-resolution wide-swath SAR system[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(7): 4224–4239. DOI: 10.1109/TGRS.2016.2538564[12] Krieger G, Gebert N, and Moreira A. Multidimensional waveform encoding: A new digital beamforming technique for synthetic aperture radar remote sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 31–46. DOI: 10.1109/TGRS.2007.905974[13] 武其松, 邢孟道, 刘保昌, 等. 脉内聚束SAR方位高分辨率宽测绘带成像[J]. 西安电子科技大学学报(自然科学版), 2010, 37(4): 676–682, 699. DOI: 10.3969/j.issn.1001-2400.2010.04.017Wu Qi-song, Xing Meng-dao, Liu Bao-chang, et al. High azimuth resolution wide swath imaging based on the intrapulse spotlight SAR[J]. Journal of Xidian University, 2010, 37(4): 676–682, 699. DOI: 10.3969/j.issn.1001-2400.2010.04.017[14] Dall J and Kusk A. Azimuth phase coding for range ambiguity suppression in SAR[C]. International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004, 3: 1734–1737[15] 郭磊, 王宇, 邓云凯, 等. 基于方位向相位编码技术的方位向多通道SAR距离模糊抑制方法[J]. 电子与信息学报, 2015, 37(3): 601–606. DOI: 10.11999/JEIT140707Guo Lei, Wang Yu, Deng Yun-kai, et al. Range ambiguity suppression for multi-channel SAR system using azimuth phase coding technique[J]. Journal of Electronics&Information Technology, 2015, 37(3): 601–606. DOI: 10.11999/JEIT140707[16] 邢孟道, 李真芳, 保铮, 等. 分布式小卫星雷达空时频成像方法研究[J]. 宇航学报, 2005, 26(S1): 70–76, 82. DOI: 10.3321/j.issn:1000-1328.2005.z1.014Xing Meng-dao, Li Zhen-fang, Bao Zheng, et al. Study of distributed microsatellites radar space-time-frequency imaging method[J]. Journal of Astronautics, 2005, 26(S1): 70–76, 82. DOI: 10.3321/j.issn:1000-1328.2005.z1.014[17] Cumming I G and Wong F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Norwood, MA, USA: Artech House, 2005[18] Zhang S X, Xing M D, Xia X G, et al. Multichannel HRWS SAR imaging based on range-variant channel calibration and multi-Doppler-direction restriction ambiguity suppression[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(7): 4306–4327. DOI: 10.1109/TGRS.2013.2281329 -
Proportional views


- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


- Figure 1. Transmitting and receiving signal modes of azimuth multi-channel intra-pulse spotlight SAR
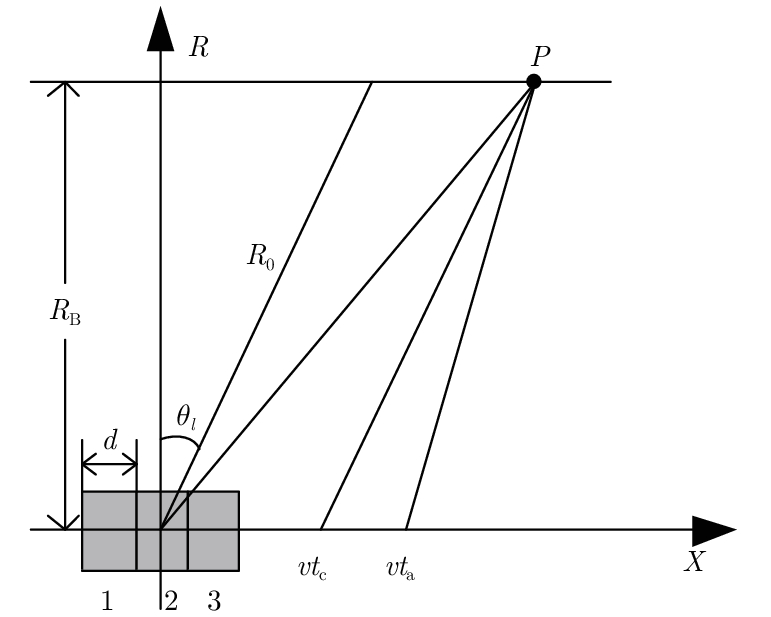
- Figure 2. Imaging geometry in the slant-range plane
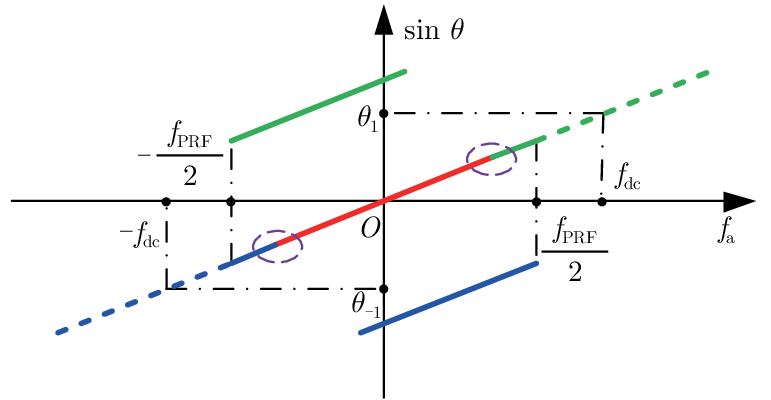
- Figure 3. Time-frequency relation of different azimuth sub-scene echo signal
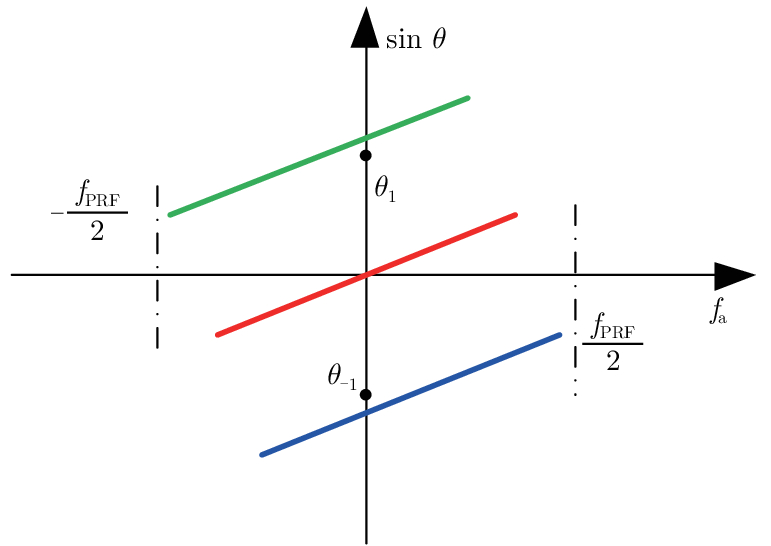
- Figure 4. Time-frequency relation after adopting the APC technique
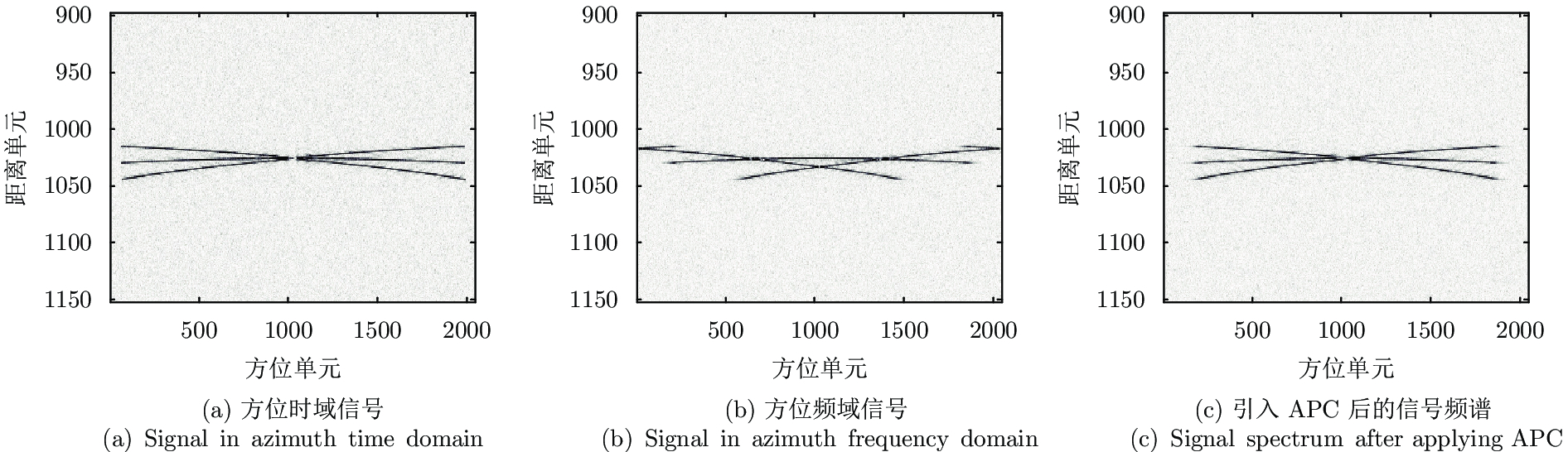
- Figure 5. Echo signal and spectrum of one channel
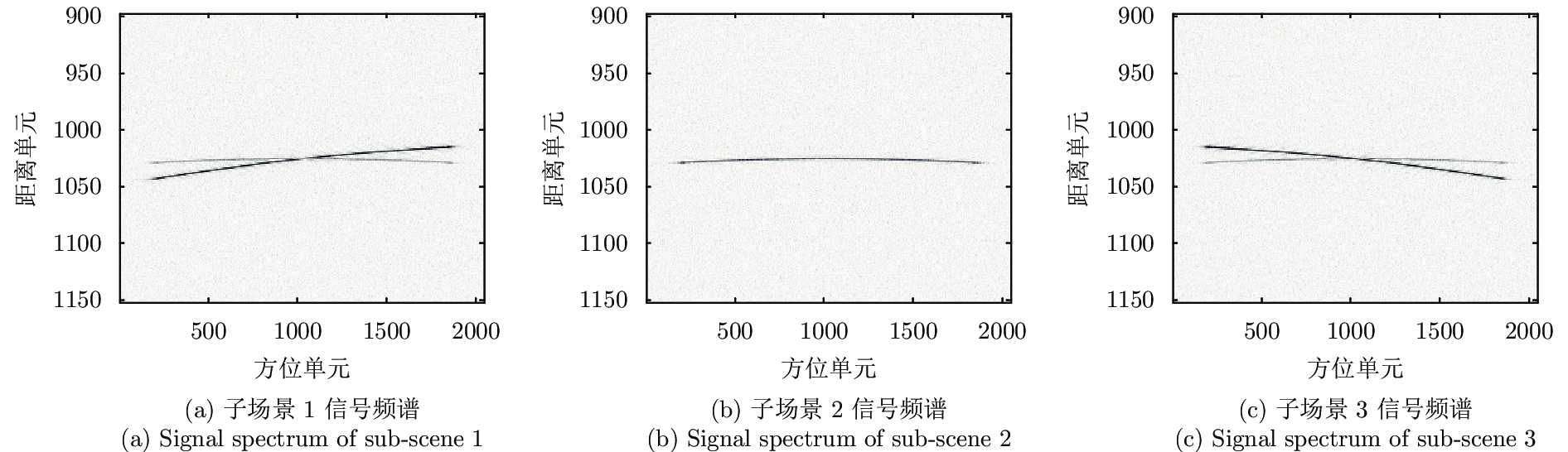
- Figure 6. Signal division results by the method in Ref. [13]
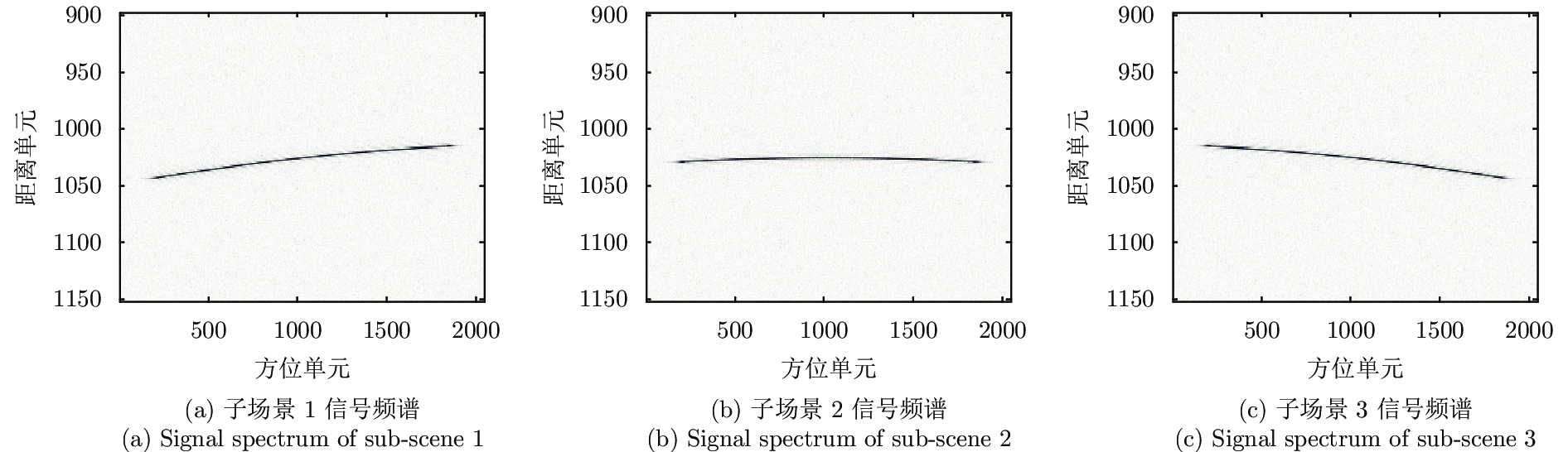
- Figure 7. Signal division results by the method in the paper
- Figure 8. Imaging result of the combined complete Doppler spectrum
- Figure 9. Simulation results of area target