
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Track Initiation Method for FM-based Passive Radar Network Based on Multiple Elementary Hypotheses
-
摘要: 基于调频(FM)广播信号的外辐射源雷达有着检测概率低、虚警率高、量测精度差的特点,这给组网目标跟踪带来了极大挑战。一方面,较高的虚警率使计算量增加,组网算法的实时性受到考验;另一方面,检测概率低、方位角精度差造成冗余信息缺乏,量测关联与航迹起始变得困难。为解决这些问题,该文提出初级假设点和初级假设航迹的概念,以及基于此概念的FM广播外辐射源雷达网航迹起始算法。首先构造可能的低维关联假设,并解算出与其对应的初级假设点;随后关联不同时刻的初级假设点,形成多条可能的初级假设航迹;最后联合多场雷达网数据进行假设航迹判决,真实目标对应的初级假设航迹会得到确认,错误关联导致的虚假初级假设航迹会被剔除。相比于已有算法,所提算法有着更低的计算量,更快的航迹起始速度,仿真与实测结果均验证了所提算法的有效性。
-
关键词:
- FM广播外辐射源雷达 /
- 初级假设 /
- 航迹起始 /
- 雷达网信息融合
Abstract: Passive radars based on FM radio signals have low detection probability, high false alarm rates and poor accuracy, presenting considerable challenges to target tracking in radar networks. Moreover, a high false alarm rate increases the computational burden and puts forward high requirements for the real-time performance of networking algorithms. In addition, low detection probability and poor azimuth accuracy result in a lack of redundant information, making measurement association and track initiation challenging. To address these issues, this paper proposes an FM-based passive radar network based on the concepts of elementary hypothesis points and elementary hypothesis track, as well as a track initiation algorithm. First, we construct possible low-dimensional association hypotheses and solve for their corresponding elementary hypothesis points. Subsequently, we associate elementary hypothesis points from different frames to form multiple possible elementary hypothesis tracks. Finally, by combining multi-frame radar network data for hypothesis track judgment, we confirm the elementary hypothesis tracks corresponding to the real targets, and eliminate the false elementary hypothesis tracks caused by incorrect associations. Result reveal that the proposed algorithm has lower computational complexity and faster track initiation speed than existing algorithms. Moreover, we verified the effectiveness of the proposed algorithm using simulation and experimental results. -
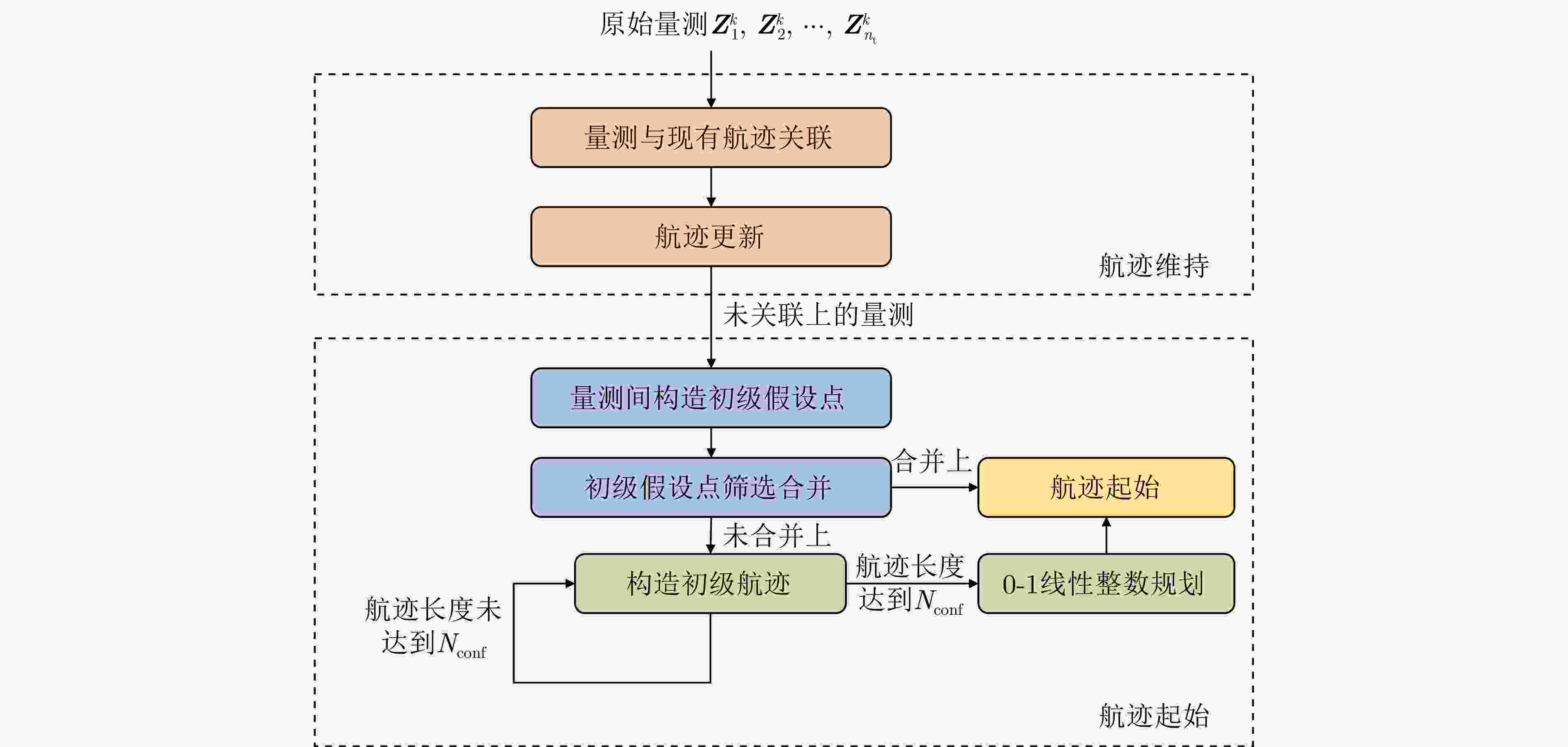
图 1 组网跟踪算法流程图
Figure 1. Flowchart of the proposed tracking algorithm for radar network
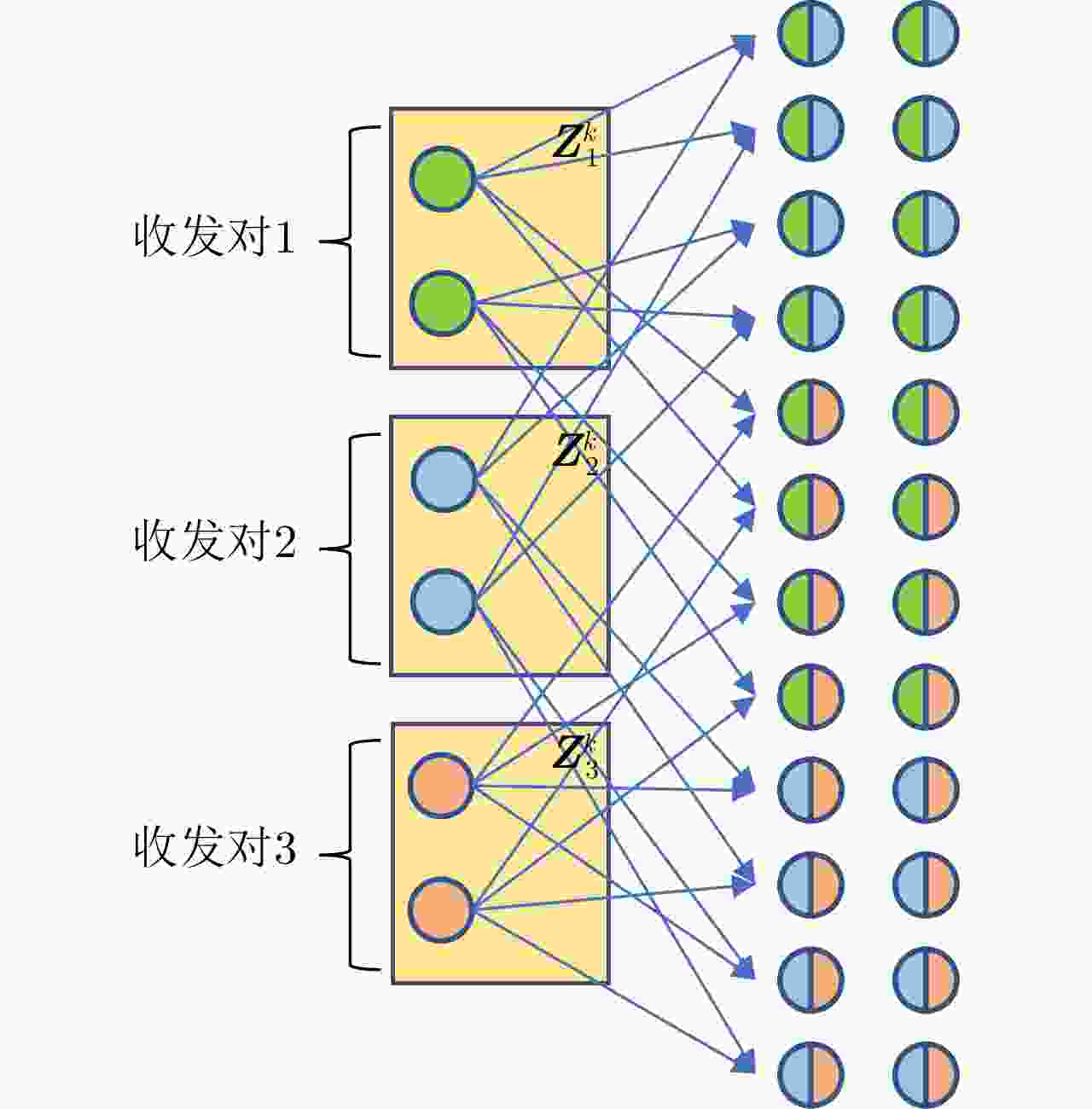
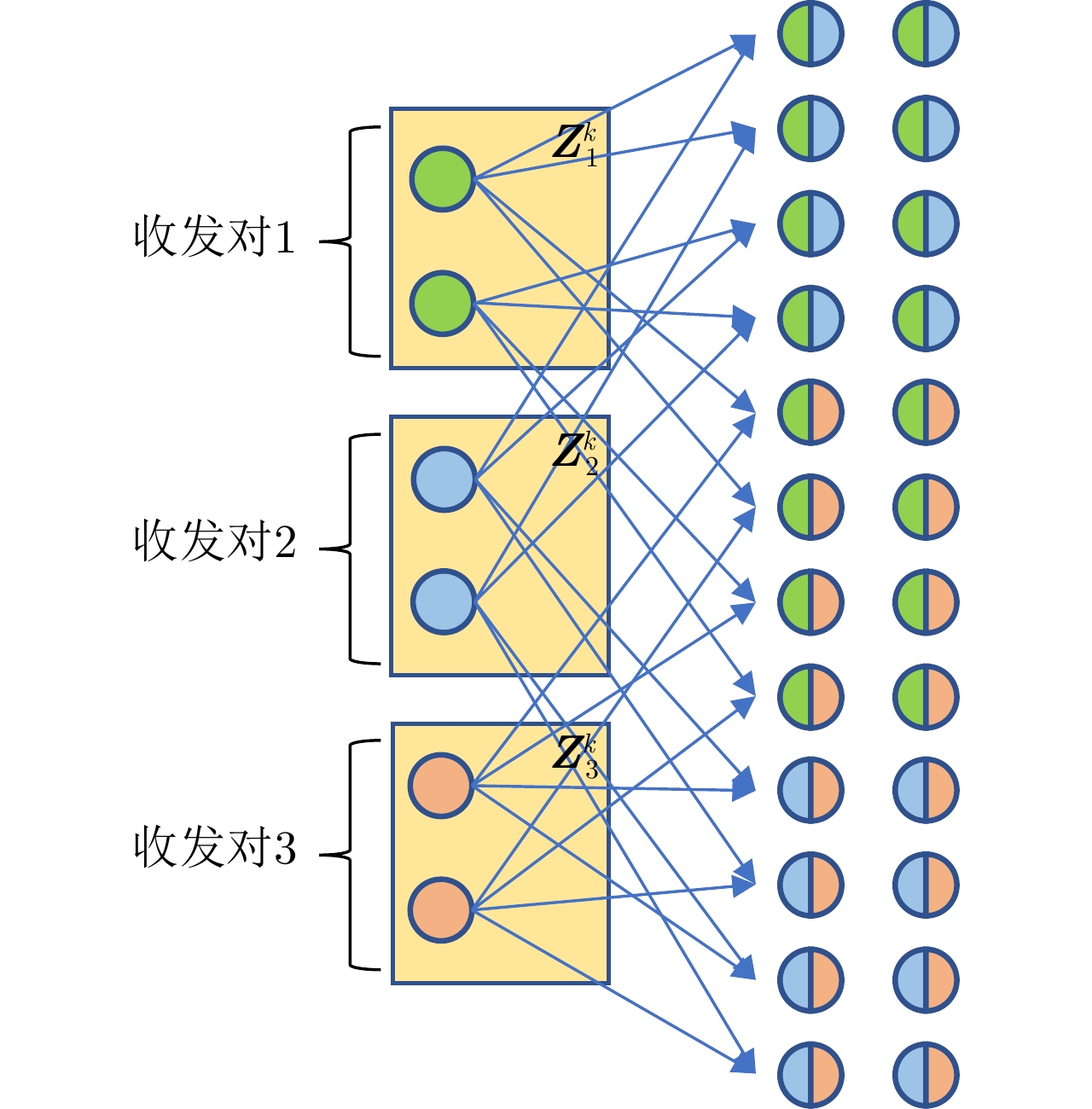
图 2 初级假设点构造示意图
Figure 2. Schematic diagram of constructing elementary hypothesis points
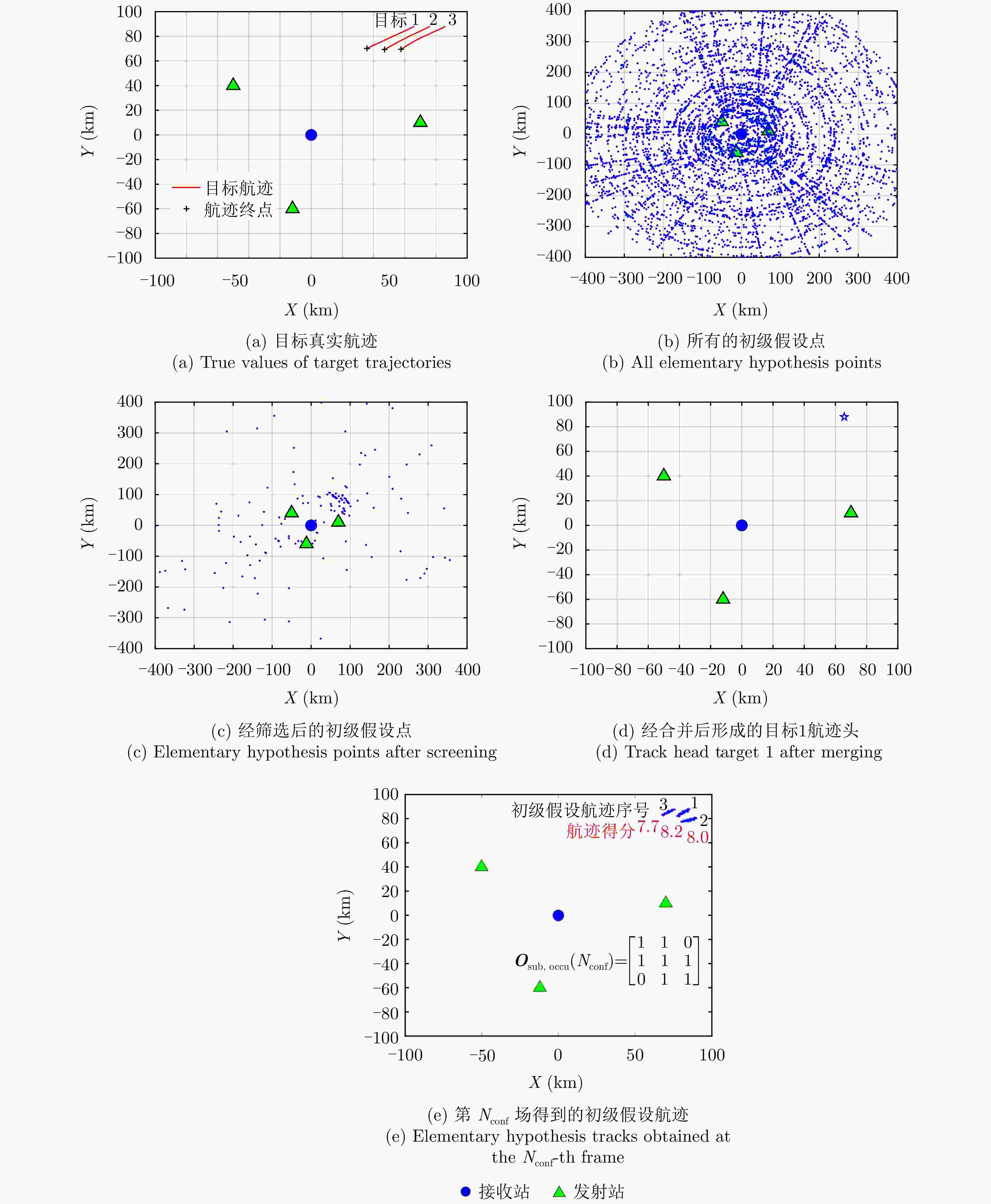
图 3 所提算法执行过程中间结果
Figure 3. Intermediate results of the proposed algorithm execution process
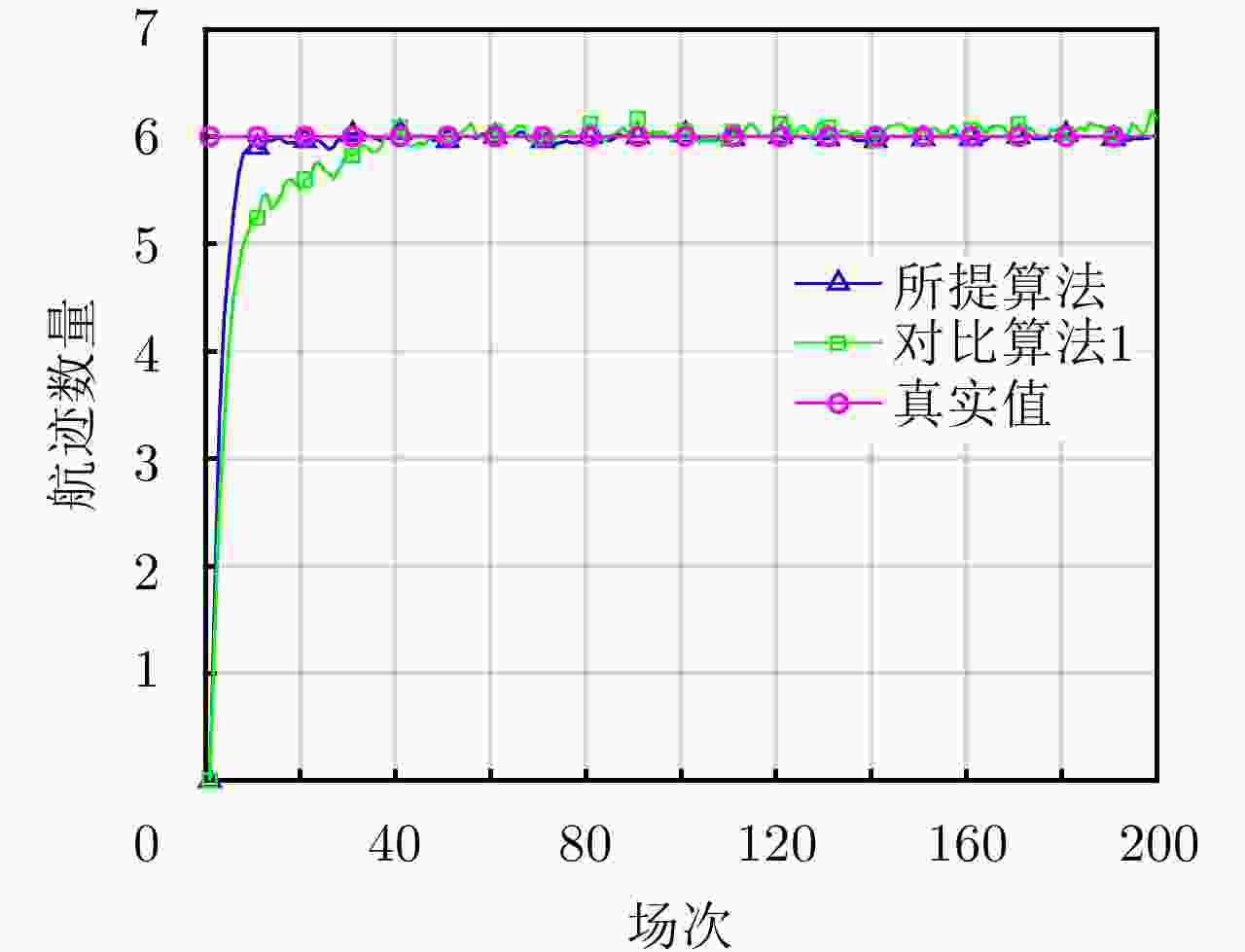
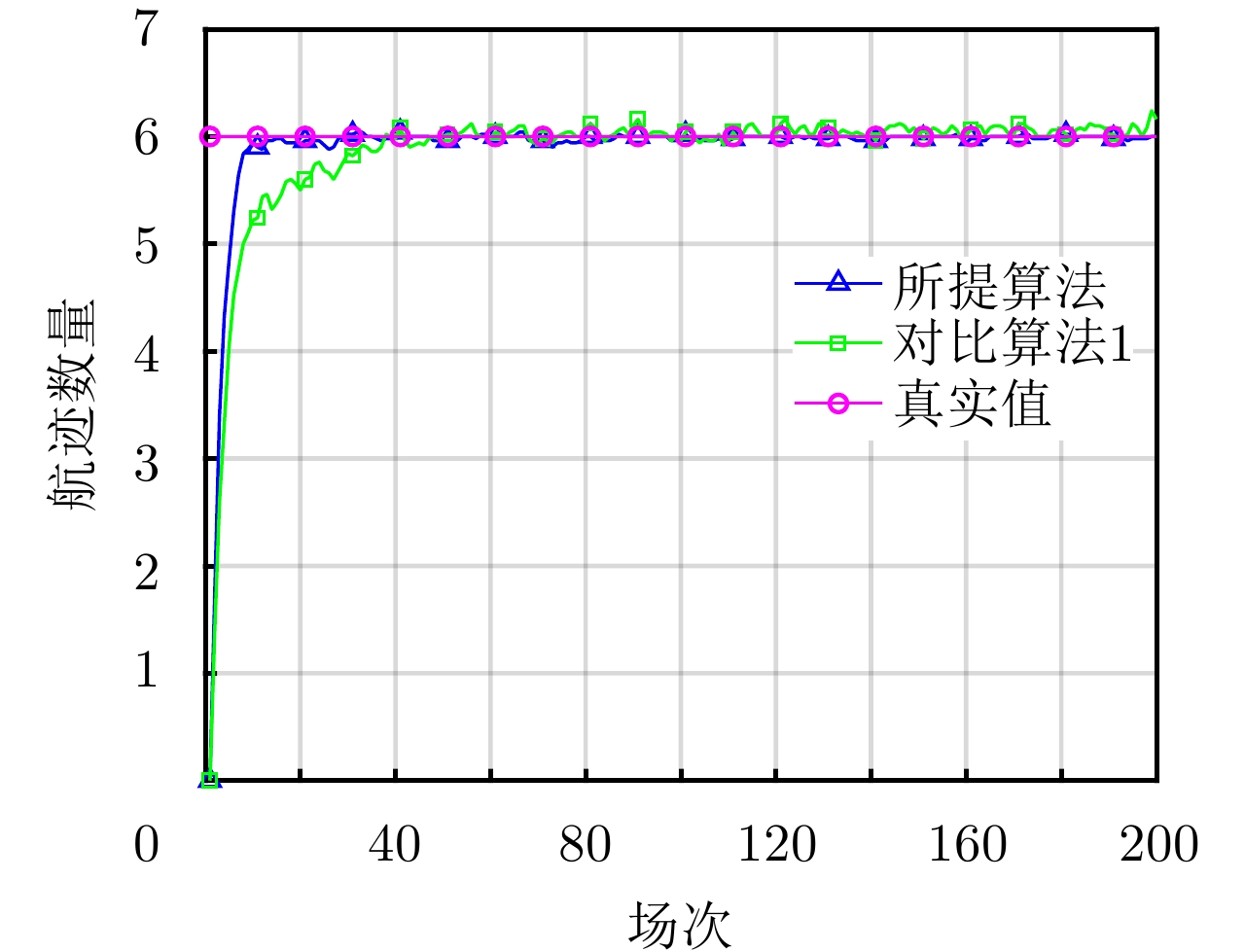
图 5 场景1平均航迹数量对比
Figure 5. Comparison of the average number of tracks obtained by different algorithms in scenario 1
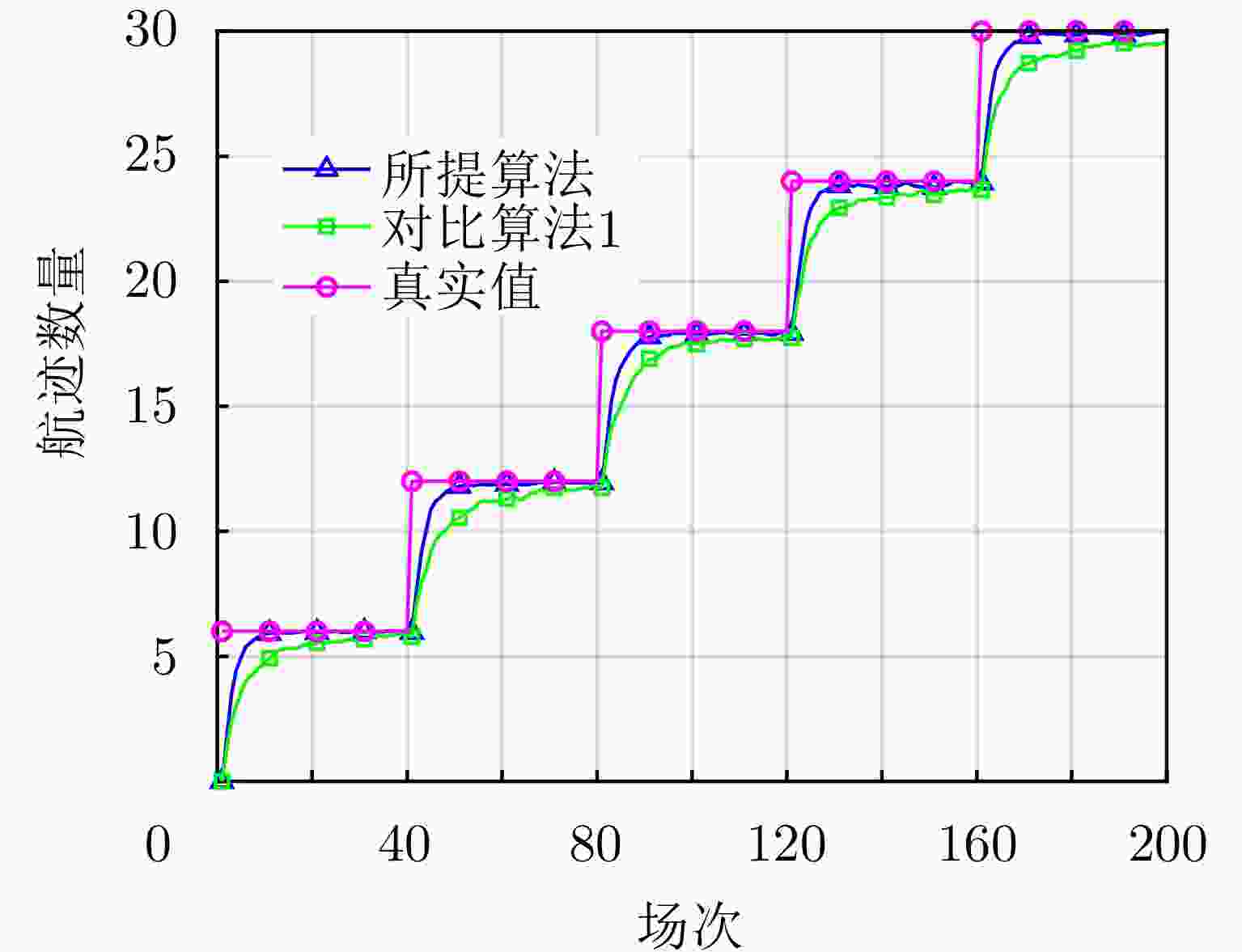
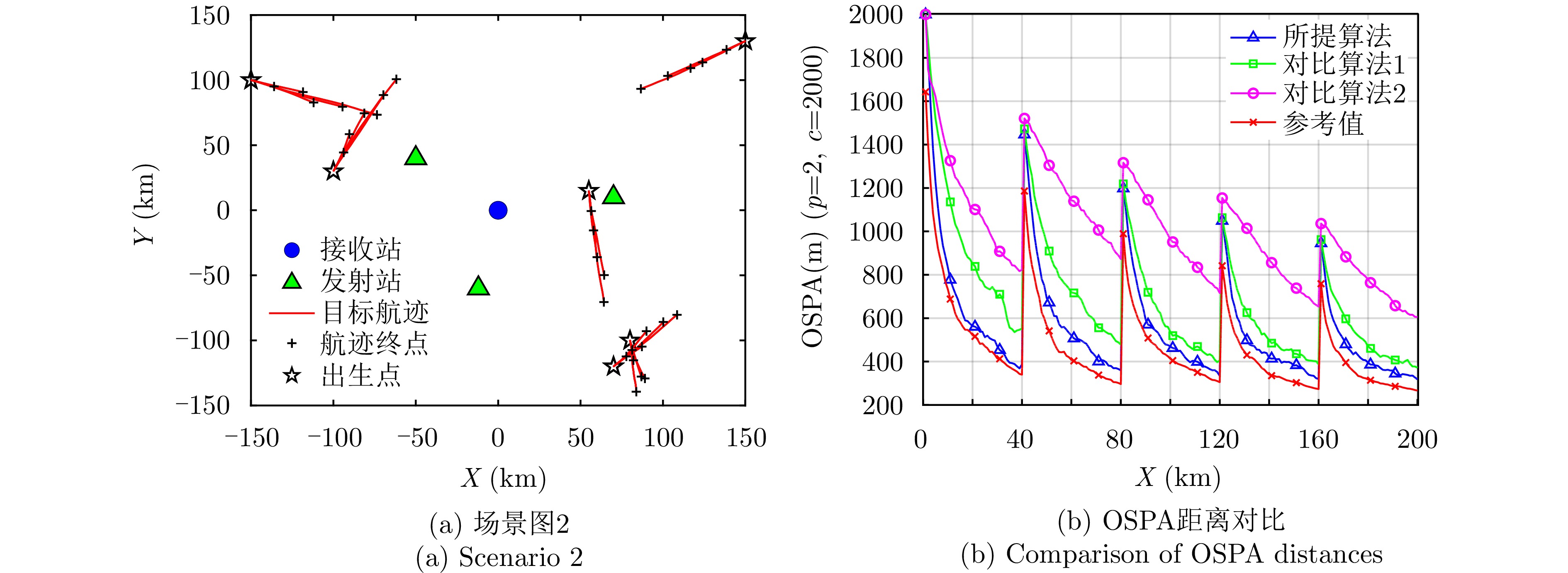
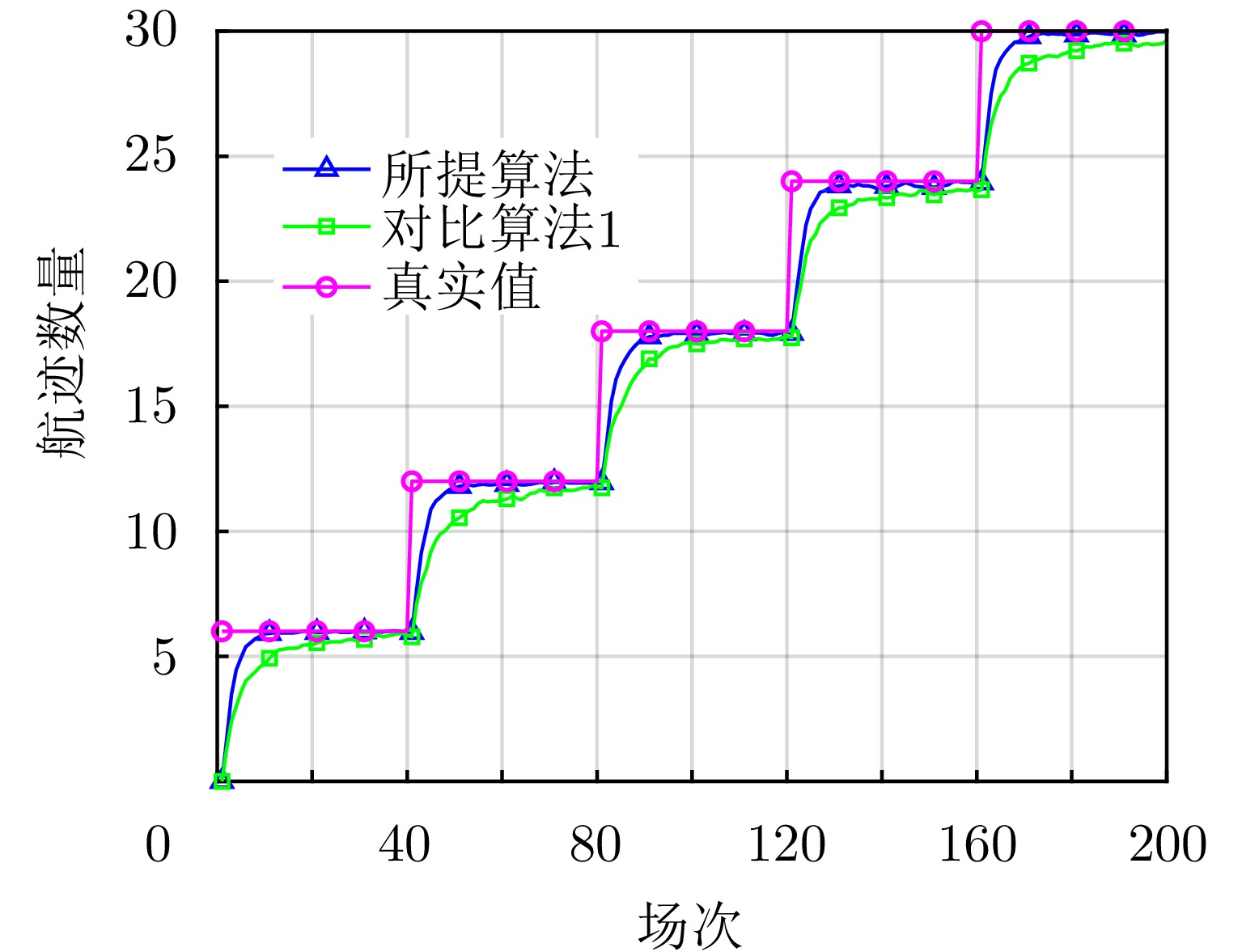
图 7 场景2平均航迹数量对比
Figure 7. Comparison of the average number of tracks obtained by different algorithms in scenario 2
表 1 仿真目标信息
Table 1. Information of targets in simulation
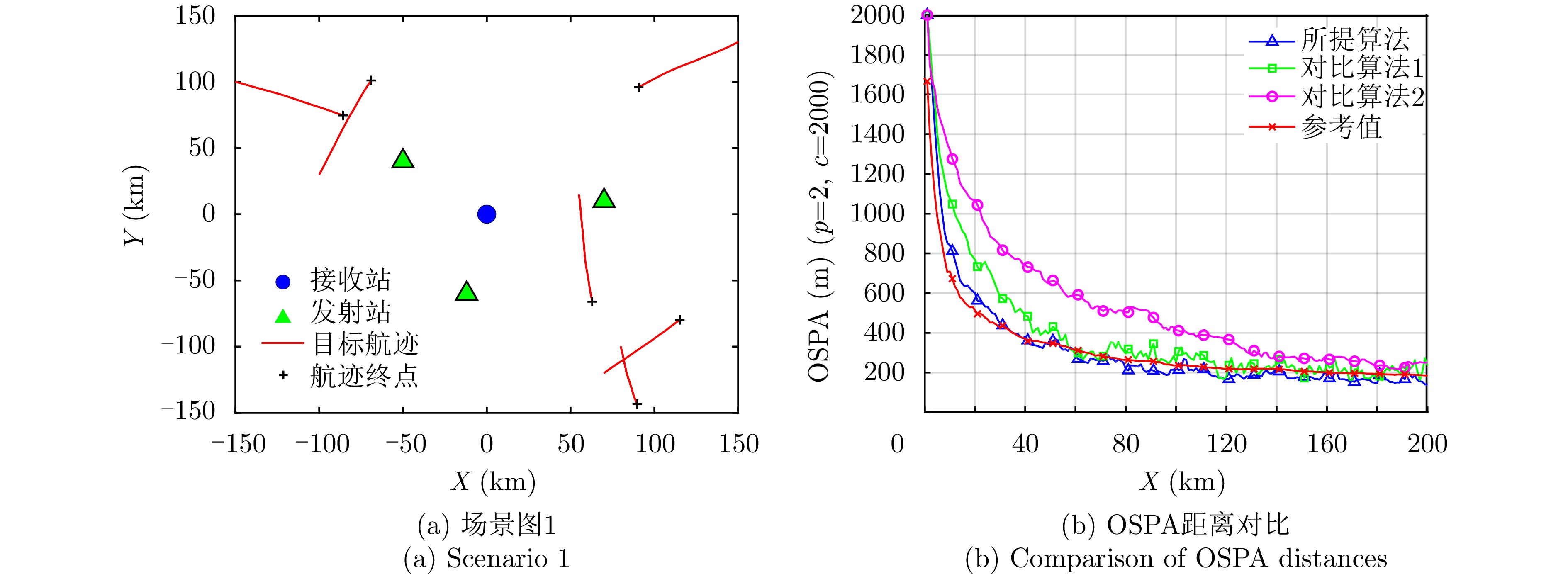
目标 初始位置(km) 初始速度(m/s) 目标出现场序号 目标终止场序号 1 [150, 130] [–150, –90] 1 200 2 [80, –100] [20, –100] 1 200 3 [–150, 100] [180, –60] 1 200 4 [70, –120] [100, 100] 1 200 5 [55, 15] [20, –200] 1 200 6 [–100, 30] [80, 180] 1 200  下载: 导出CSV
下载: 导出CSV
表 2 各收发对不同时刻的检测概率
Table 2. Detection probability of radar stations at different times
收发对序号 场次 1~50 51~100 101~150 151~200 收发对1 0.7 0.7 0.5 0.5 收发对2 0.5 0.8 0.7 0.8 收发对3 0.8 0.5 0.8 0.7
下载: 导出CSV
-
[1] 万显荣, 易建新, 占伟杰, 等. 基于多照射源的被动雷达研究进展与发展趋势[J]. 雷达学报, 2020, 9(6): 939–958. doi: 10.12000/JR20143.WAN Xianrong, YI Jianxin, ZHAN Weijie, et al. Research progress and development trend of the multi-illuminator-based passive radar[J]. Journal of Radars, 2020, 9(6): 939–958. doi: 10.12000/JR20143. [2] 万显荣, 易建新, 程丰, 等. 单频网分布式外辐射源雷达技术[J]. 雷达学报, 2014, 3(6): 623–631. doi: 10.12000/JR14156.WAN Xianrong, YI Jianxin, CHENG Feng, et al. Single frequency network based distributed passive radar technology[J]. Journal of Radars, 2014, 3(6): 623–631. doi: 10.12000/JR14156. [3] KUSCHEL H. Approaching 80 years of passive radar[C]. 2013 International Conference on Radar, Adelaide, Australia, 2013: 213–217. doi: 10.1109/RADAR.2013.6651987. [4] COLONE F, BONGIOANNI C, and LOMBARDO P. Multifrequency integration in FM radio-based passive bistatic radar. Part I: Target detection[J]. IEEE Aerospace and Electronic Systems Magazine, 2013, 28(4): 28–39. doi: 10.1109/MAES.2013.6506827. [5] POULLIN D and FLECHEUX M. Recent progress in Passive Coherent Location (PCL) concepts and technique in France using DAB or FM broadcasters[C]. 2008 IEEE Radar Conference, Rome, Italy, 2008: 1–5. doi: 10.1109/RADAR.2008.4721009. [6] SLAVOV A, SANDENBERGH S, O’HAGAN D, et al. Multiple FM-based passive bistatic pairs for robust target detection with improved position accuracy[C]. 2022 23rd International Radar Symposium (IRS), Gdansk, Poland, 2022: 332–337. doi: 10.23919/IRS54158.2022.9905050. [7] PLŠEK R, STEJSKAL V, PELANT M, et al. FM based passive coherent radar: From detections to tracks[C]. 2011 Tyrrhenian International Workshop on Digital Communications - Enhanced Surveillance of Aircraft and Vehicles, Capri, Italy, 2011: 123–127. [8] ZHANG Chenqi, WU Yong, WANG Jun, et al. FM-based multi-frequency passive radar system[C]. 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 2016: 1–4. doi: 10.1109/ICSPCC.2016.7753668. [9] TUYSUZ B, URBINA J V, and MATHEWS J D. Effects of the equatorial electrojet on FM-based passive radar systems[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(7): 4082–4088. doi: 10.1109/TGRS.2017.2687830. [10] FU Yan, WAN Xianrong, ZHANG Xun, et al. Side peak interference mitigation in FM-based passive radar via detection identification[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(2): 778–788. doi: 10.1109/TAES.2017.2665079. [11] O’HAGAN D W, KUSCHEL H, UMMENHOFER M, et al. A multi-frequency hybrid passive radar concept for medium range air surveillance[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(10): 6–15. doi: 10.1109/MAES.2012.6373907. [12] ZAIMBASHI A, DERAKHTIAN M, and SHEIKHI A. Invariant target detection in multiband FM-based passive Bistatic Radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 720–736. doi: 10.1109/TAES.2013.120248. [13] BONGIOANNI C, COLONE F, and LOMBARDO P. Performance analysis of a multi-frequency FM based passive Bistatic Radar[C]. 2008 IEEE Radar Conference, Rome, Italy, 2008: 1–6. doi: 10.1109/RADAR.2008.4720805. [14] BHARADWAJ L S, SWEETLIN P, and VISHNU O C. FM based passive radar tracking of targets under poor waveforms[C]. 2022 IEEE Microwaves, Antennas, and Propagation Conference (MAPCON), Bangalore, India, 2022: 1599–1603. doi: 10.1109/MAPCON56011.2022.10047271. [15] 何友, 修建娟, 关欣, 等. 雷达数据处理及应用[M]. 3版. 北京: 电子工业出版社, 2013: 108–125.HE You, XIU Jianjuan, GUAN Xin, et al. Radar Data Processing with Applications[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 108–125. [16] HELMICK R E and WATSON G A. Interacting multiple model integrated probabilistic data association filters (IMM-IPDAF) for track formation on maneuvering targets in cluttered environments[C]. Proceedings of SPIE 2235, Signal and Data Processing of Small Targets 1994, Orlando, USA, 1994: 460–471. doi: 10.1117/12.179097. [17] CHOI S, CROUSE D, WILLETT P, et al. Multistatic target tracking for passive radar in a DAB/DVB network: Initiation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2460–2469. doi: 10.1109/TAES.2015.130270. [18] BAEK J, LEE J, SHIM H, et al. Target tracking initiation for multi-static multi-frequency PCL system[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10558–10568. doi: 10.1109/TVT.2020.3012135. [19] DAUN M, NICKEL U, and KOCH W. Tracking in multistatic passive radar systems using DAB/DVB-T illumination[J]. Signal Processing, 2012, 92(6): 1365–1386. doi: 10.1016/j.sigpro.2011.09.005. [20] YI Jianxin, WAN Xianrong, CHENG Feng, et al. Deghosting for target tracking in single frequency network based passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2655–2668. doi: 10.1109/TAES.2015.130424. [21] SHU Kan, YI Jianxin, WAN Xianrong, et al. A hybrid tracking algorithm for multistatic passive radar[J]. IEEE Systems Journal, 2021, 15(2): 2024–2034. doi: 10.1109/JSYST.2020.2994009. [22] YI Jianxin, WAN Xianrong, LEUNG H, et al. MIMO passive radar tracking under a single frequency network[J]. IEEE Journal of Selected Topics in Signal Processing, 2015, 9(8): 1661–1671. doi: 10.1109/JSTSP.2015.2464188. [23] BOZDOĞAN A Ö and EFE M. Track initiation using multiple bistatic range and range rate measurements with multidimensional assignment algorithm[C]. 2010 IEEE 18th Signal Processing and Communications Applications Conference, Diyarbakir, Turkey, 2010: 435–438. doi: 10.1109/SIU.2010.5650348. [24] LIU Zongxiang, ZHU Xiaoping, and HUANG Bingjian. Track initiation technique and its application in PHD filter[C]. 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 2018: 822–826. doi: 10.1109/ICSP.2018.8652496. [25] BAR-SHALOM Y, LI X R, and KIRUBARAJAN T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software[M]. New York, USA: John Wiley & Sons, Inc., 2001: 267–295. doi: 10.1002/0471221279. [26] MALANOWSKI M and KULPA K. Two methods for target localization in multistatic passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 572–580. doi: 10.1109/TAES.2012.6129656. [27] SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457. doi: 10.1109/TSP.2008.920469. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

