
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Micro-Doppler Clutter Removal Method Based on the Cancelation of Sliding STFT Spectrogram
-
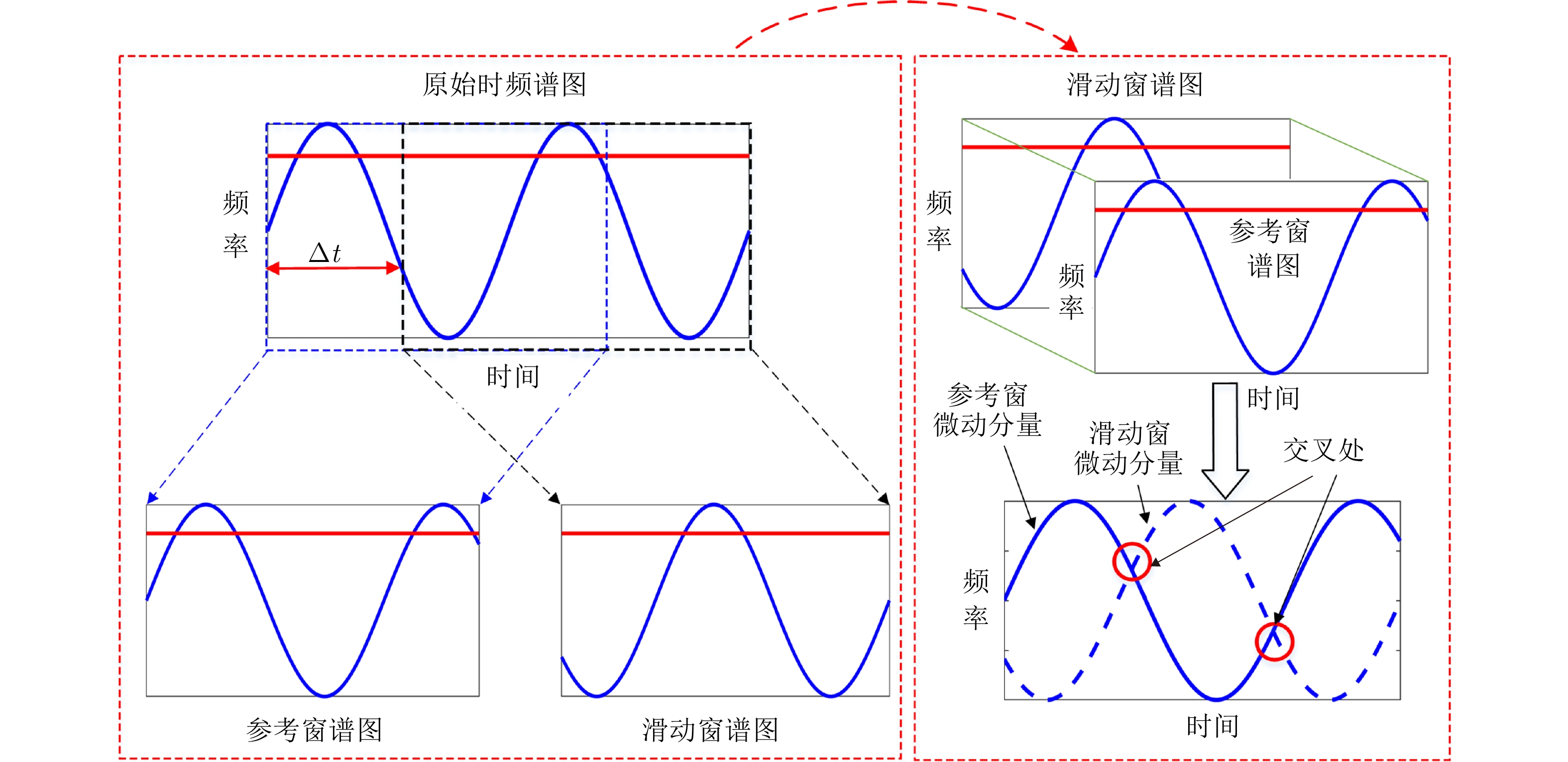
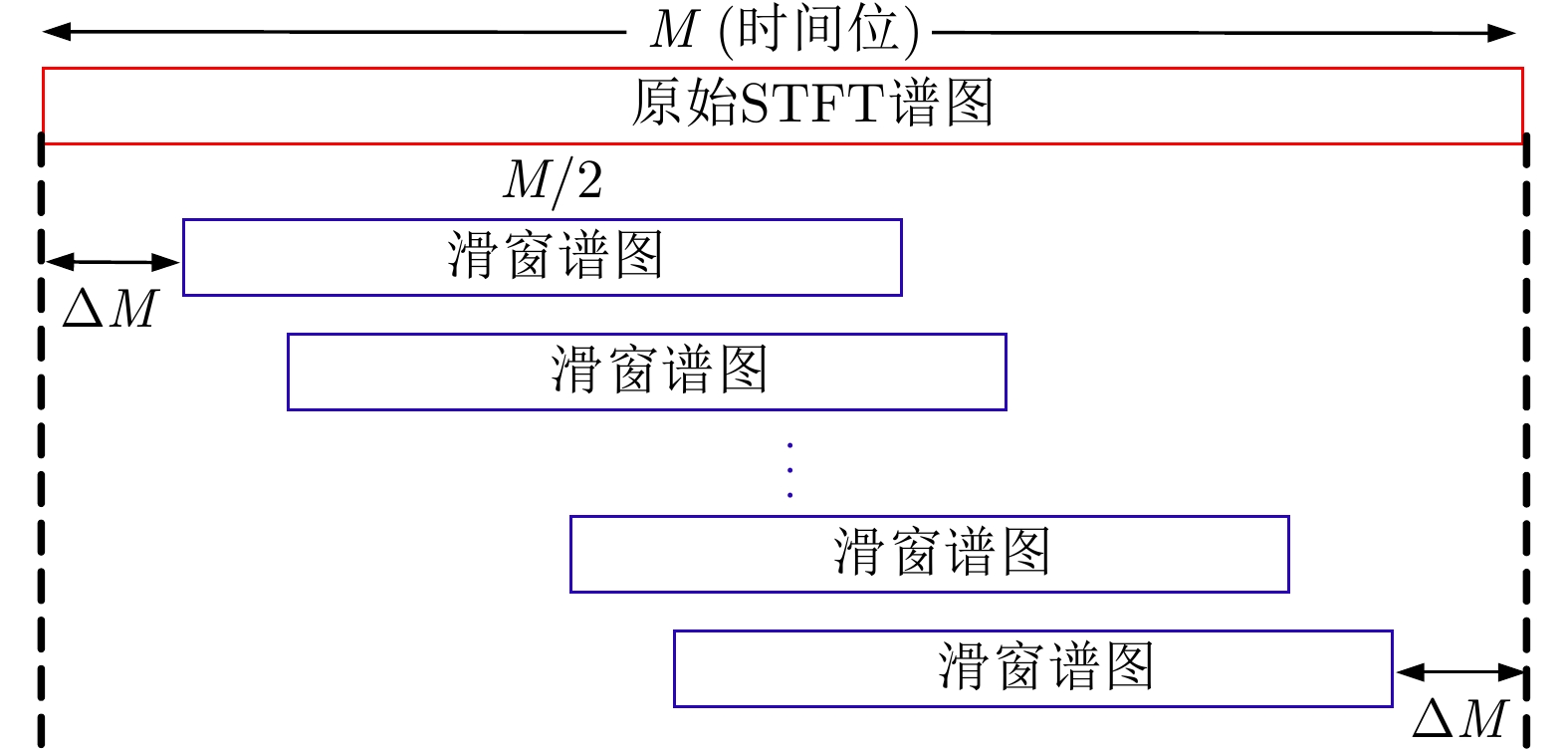
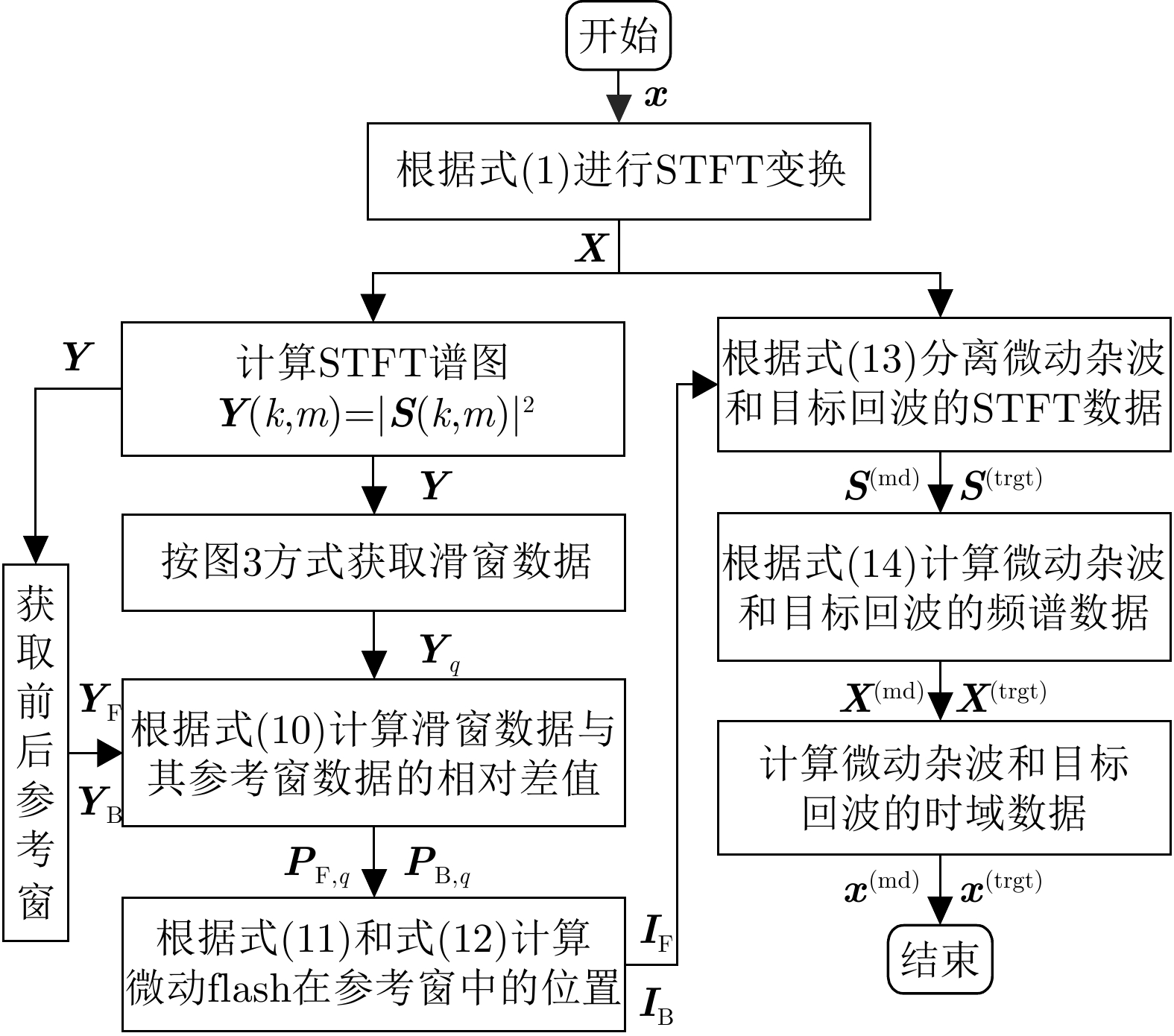
摘要: 微动杂波往往具有较大的多普勒展宽,会抬高噪底、湮没弱目标,造成虚警和漏检。有效去除微动杂波对提高雷达性能具有重要意义。该文利用匀速目标回波和微动杂波在短时傅里叶变换(STFT)谱图中的形态差异,提出了一种基于STFT谱图滑窗相消的微动杂波去除方法。具体地,匀速运动目标回波在STFT谱图中表现为特定频率单元上平行于时间轴的直线型能量条带,而微动杂波具有时变非平稳特性,在STFT谱图中呈现出横跨多个频率单元的时变复杂形态。将原始STFT谱图沿时间维滑窗得到新的STFT谱图,则目标回波分布在这两种谱图中的相同位置,而微动杂波在这两种谱图中的位置存在明显差异。因此将上述两种谱图相减,根据相减前后谱图中各单元的强度变化情况,即可将目标回波和微动杂波分离,达到去除微动杂波的效果。仿真和实测结果均验证了所提方法的有效性。与常见基于时频变换的L-statistics算法相比,所提方法能够在去除微动杂波的同时,较好地保留了目标回波。Abstract: Micro-motion clutter typically exhibits significant Doppler broadening, raises the noise floor, and annihilates weak targets, resulting in false alarms and missed detections. Removing micro-motion clutter effectively is critical to improving radar performance. In this study, a micro-motion clutter removal method based on the cancelation of the Short-Time Fourier Transform (STFT) spectrogram is proposed using the difference in the morphological performance of the constant-speed target echo and micro-motion clutter in the STFT spectrogram. The target echo appears in the STFT spectrogram as a linear energy strip parallel to the time axis on a specific frequency unit, whereas the micro-motion clutter appears as time-varying complex shapes across many frequency units due to its time-varying non-stationary characteristics. When the original STFT spectrogram slides along the time dimension to obtain the new STFT spectrograms, the target echo is distributed in the same position, whereas the position of the micro-motion clutter is different. Therefore, subtracting the above spectrograms, the target echo and the micro-motion clutter can be separated based on the intensity changes in each unit of the STFT spectrogram before and after subtraction, and the micro-motion clutter can be removed. The simulation and field experimental results validate the proposed method’s effectiveness. Compared with the common time-frequency-transform-based L-statistics algorithm, the proposed method can remove micro-motion clutter while retaining the target echo.
-
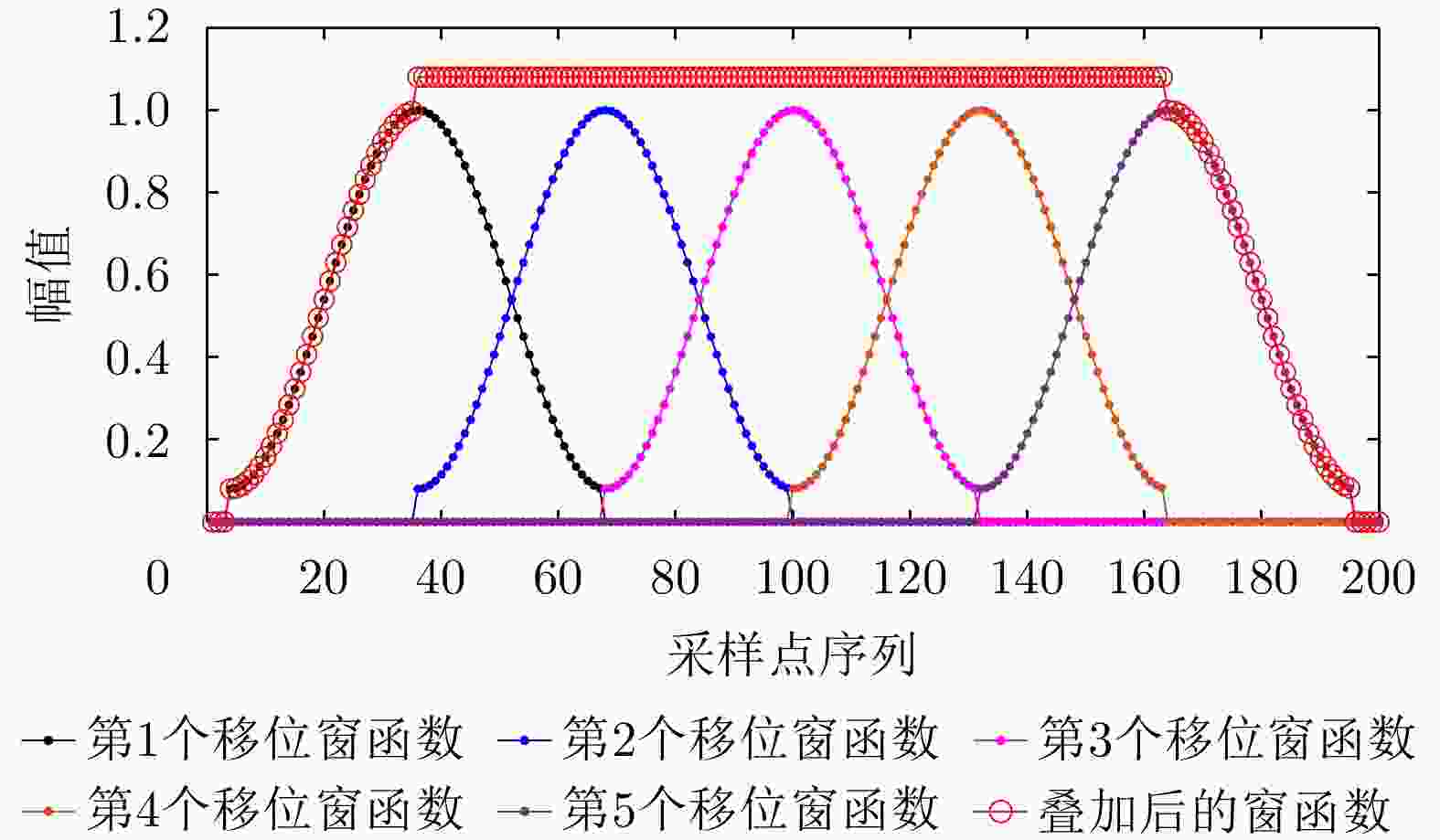
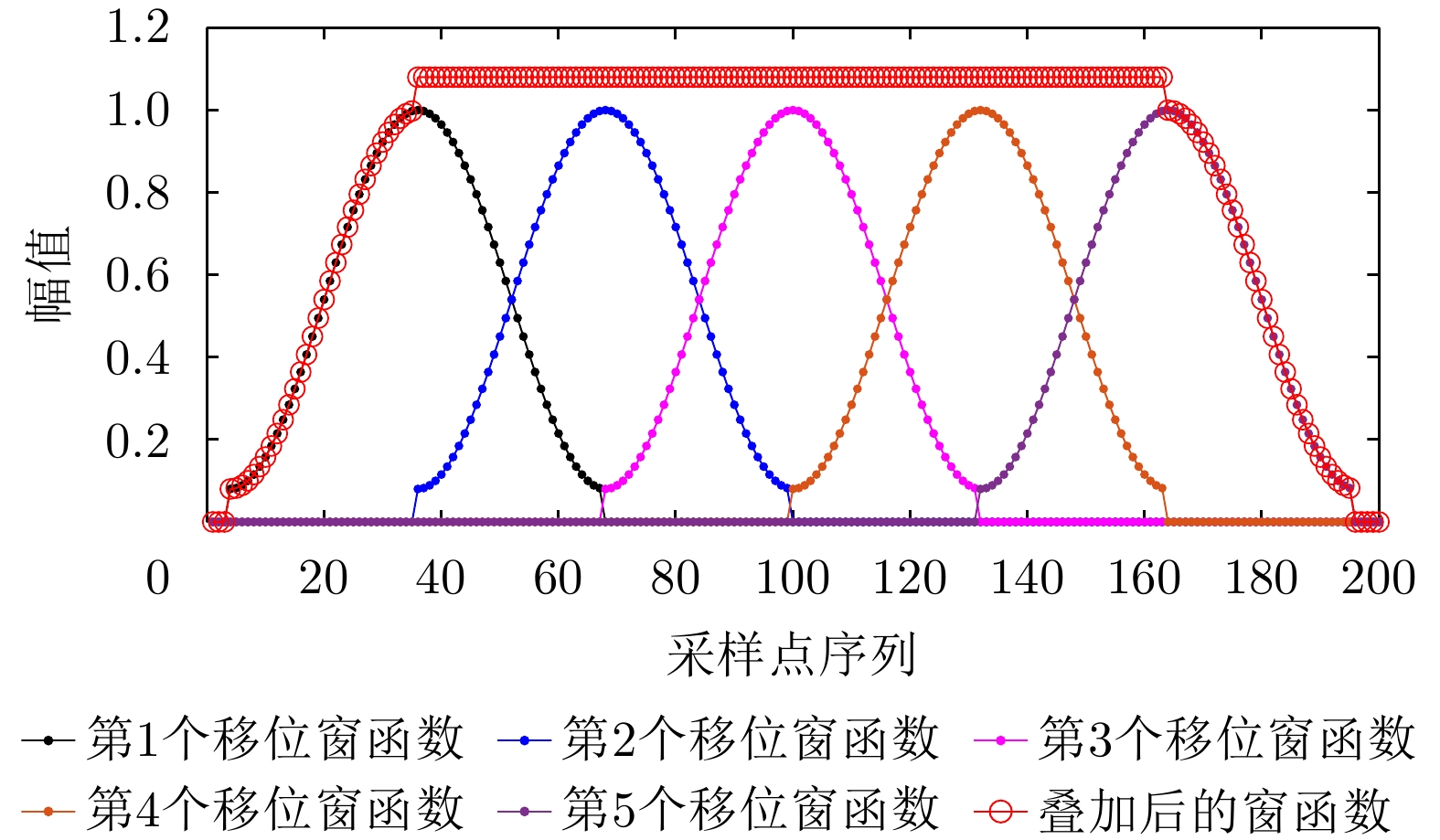
图 1 Hamming窗
$R = {N_w}/2$ 时的COLA验证Figure 1. Validation of the COLA compliant for Hamming window when
$R = {N_w}/2$ 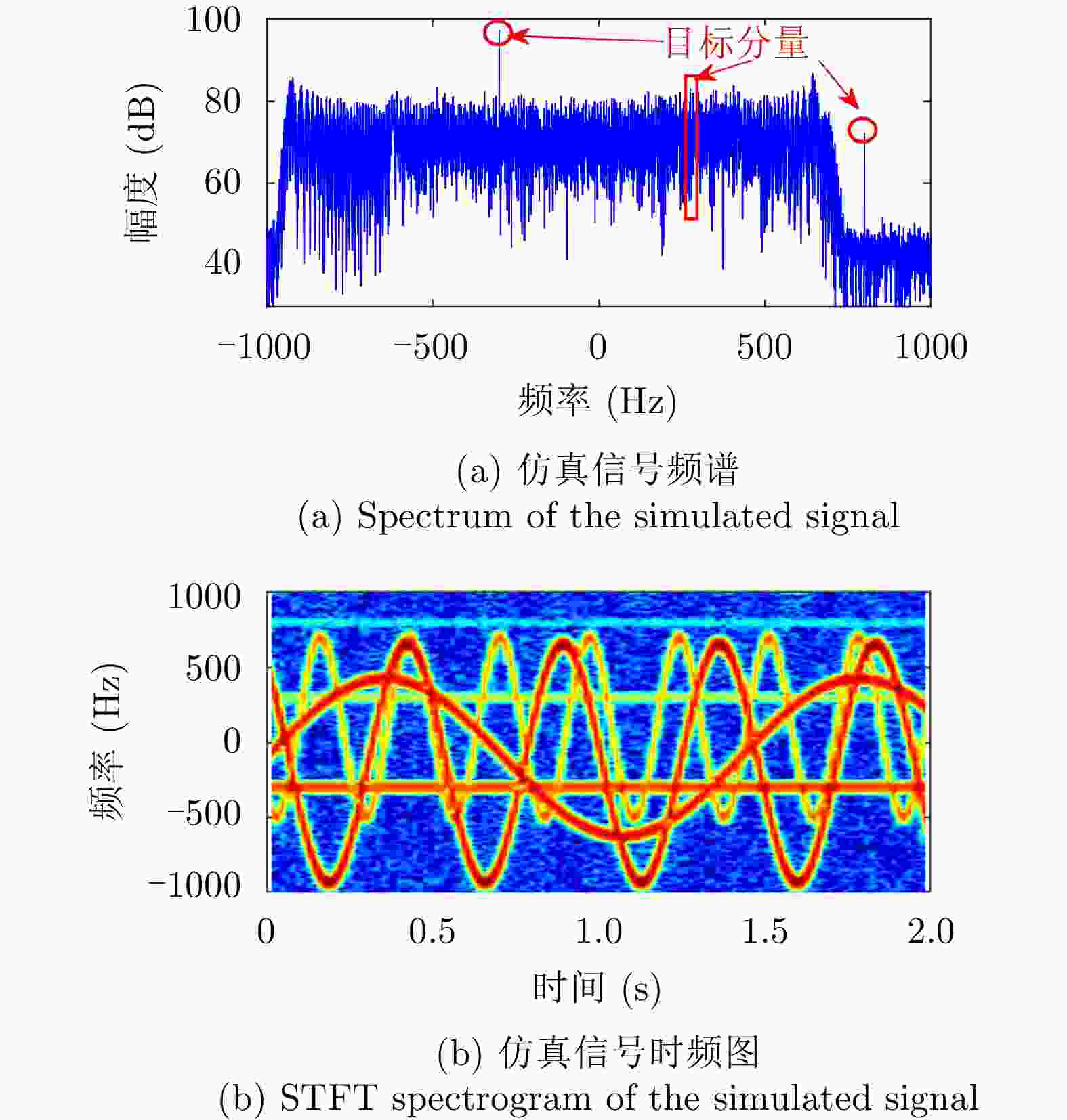
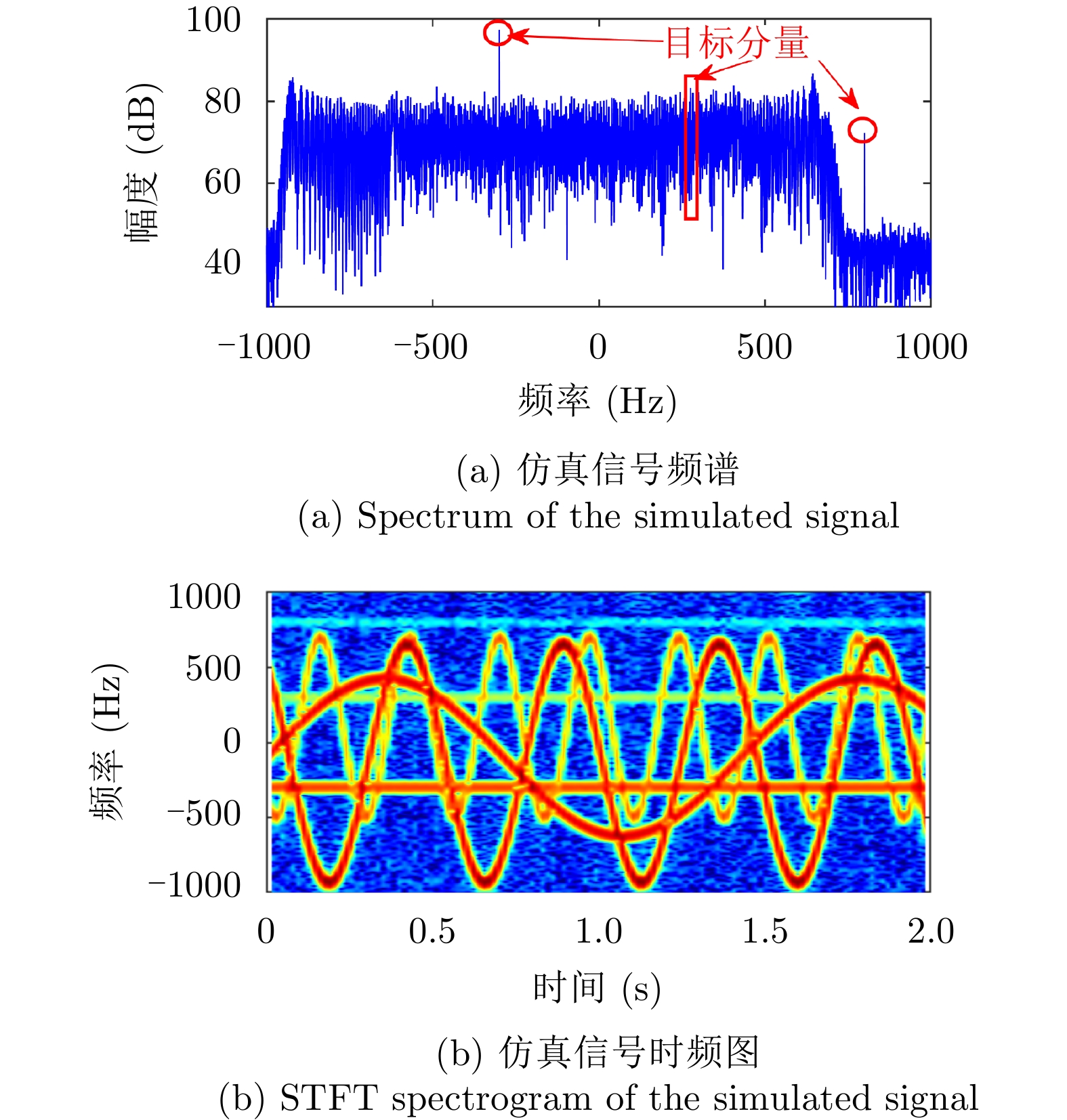
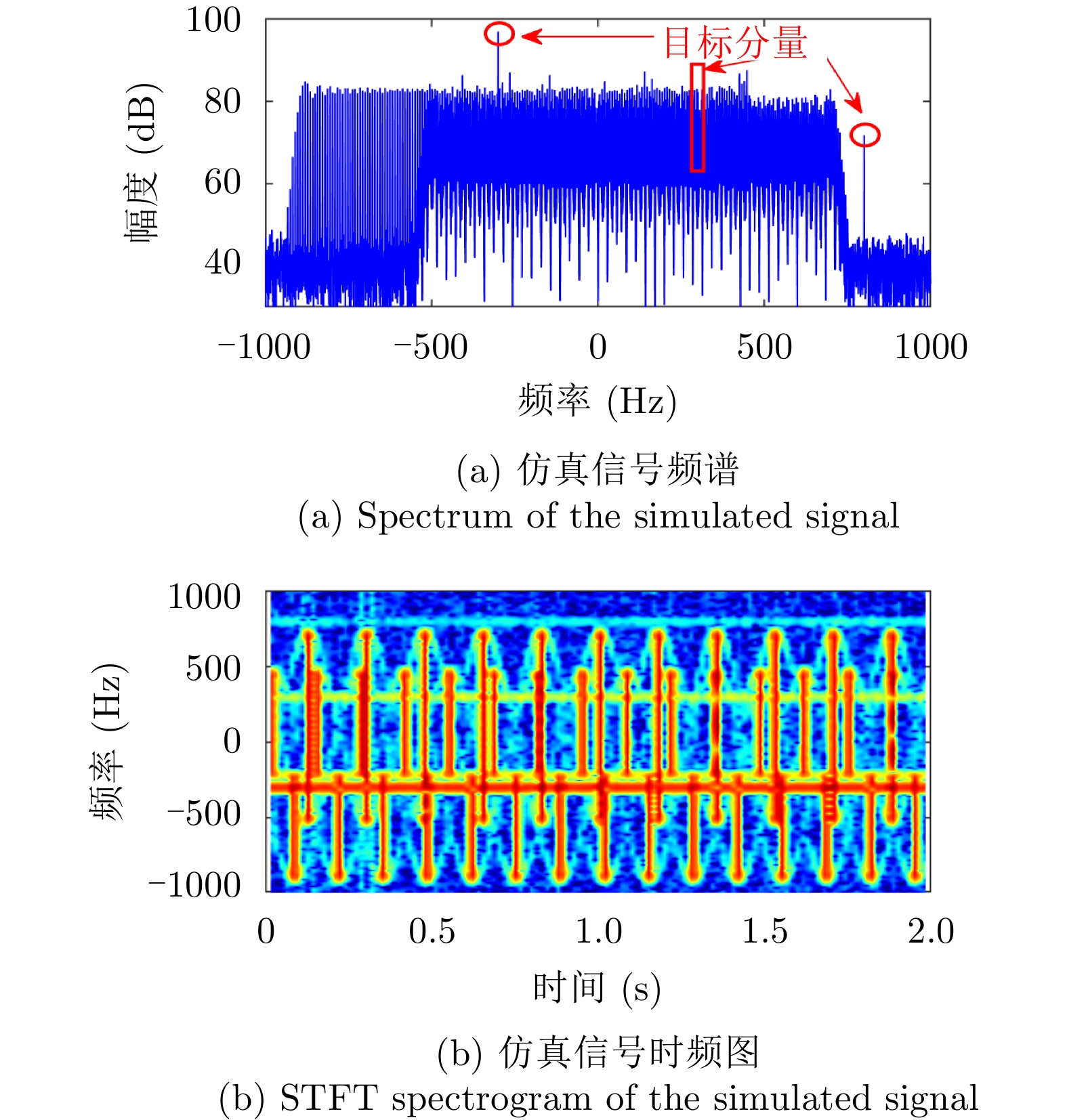
图 5 多散射点微动杂波仿真信号的频谱和STFT谱图
Figure 5. Spectrum and STFT spectrogram of the simulated signal with multiple scattering points micro-motion clutter
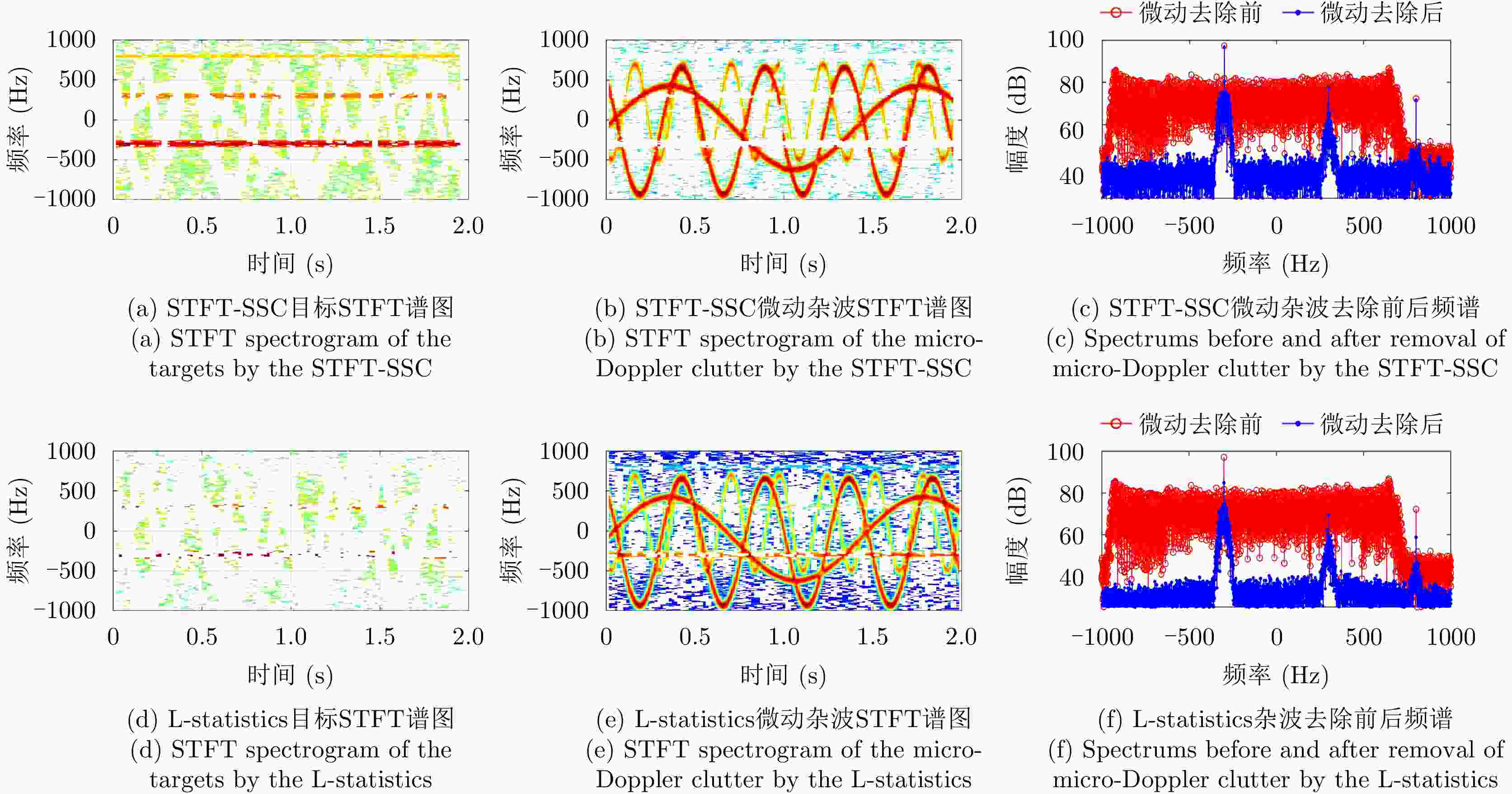
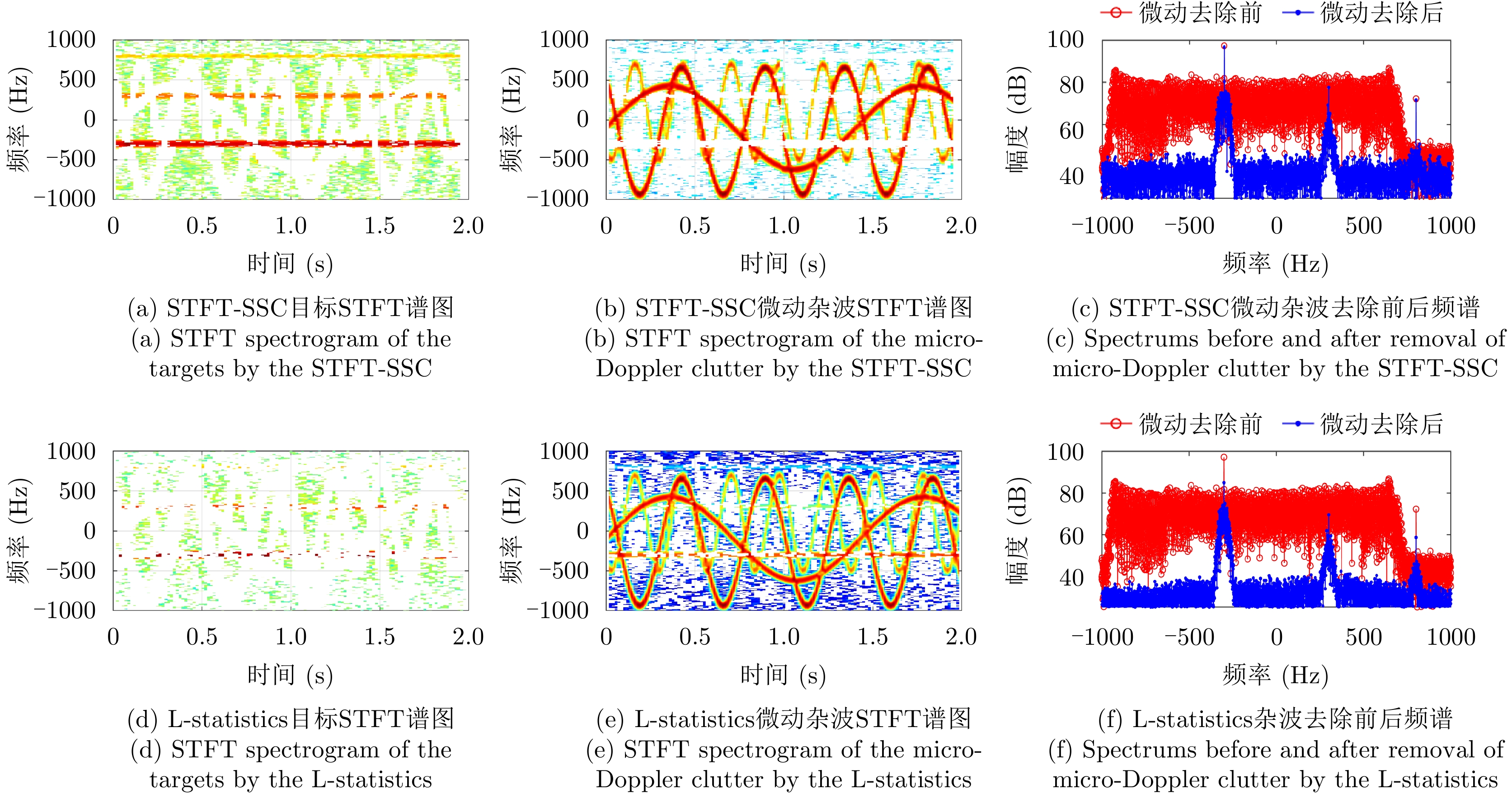
图 6 STFT-SSC和L-statistics算法多散射点微动杂波处理结果对比
Figure 6. Comparison of the processing results between the STFT-SSC and L-statistics for multi-scattering points micro-motion clutter
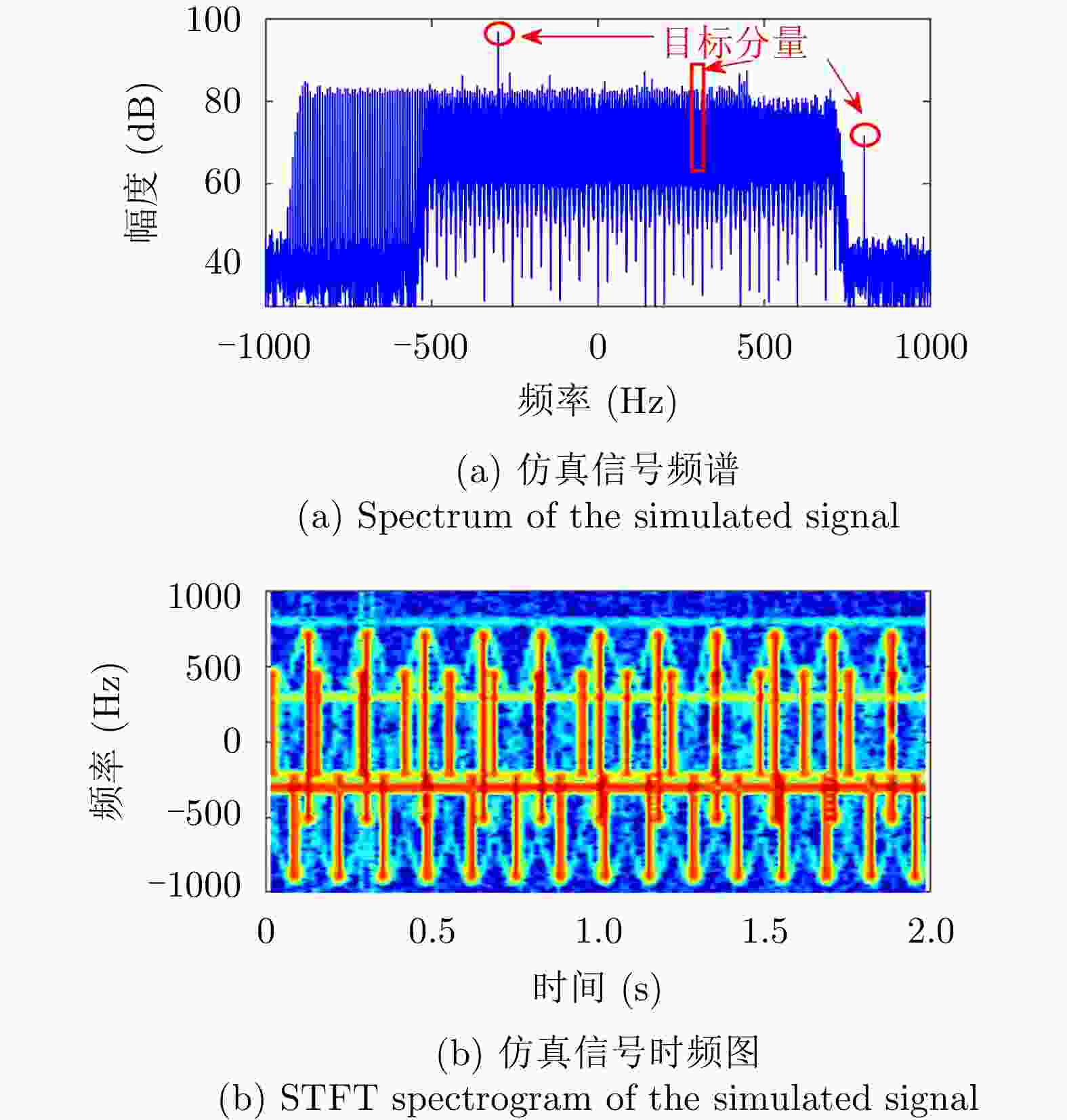
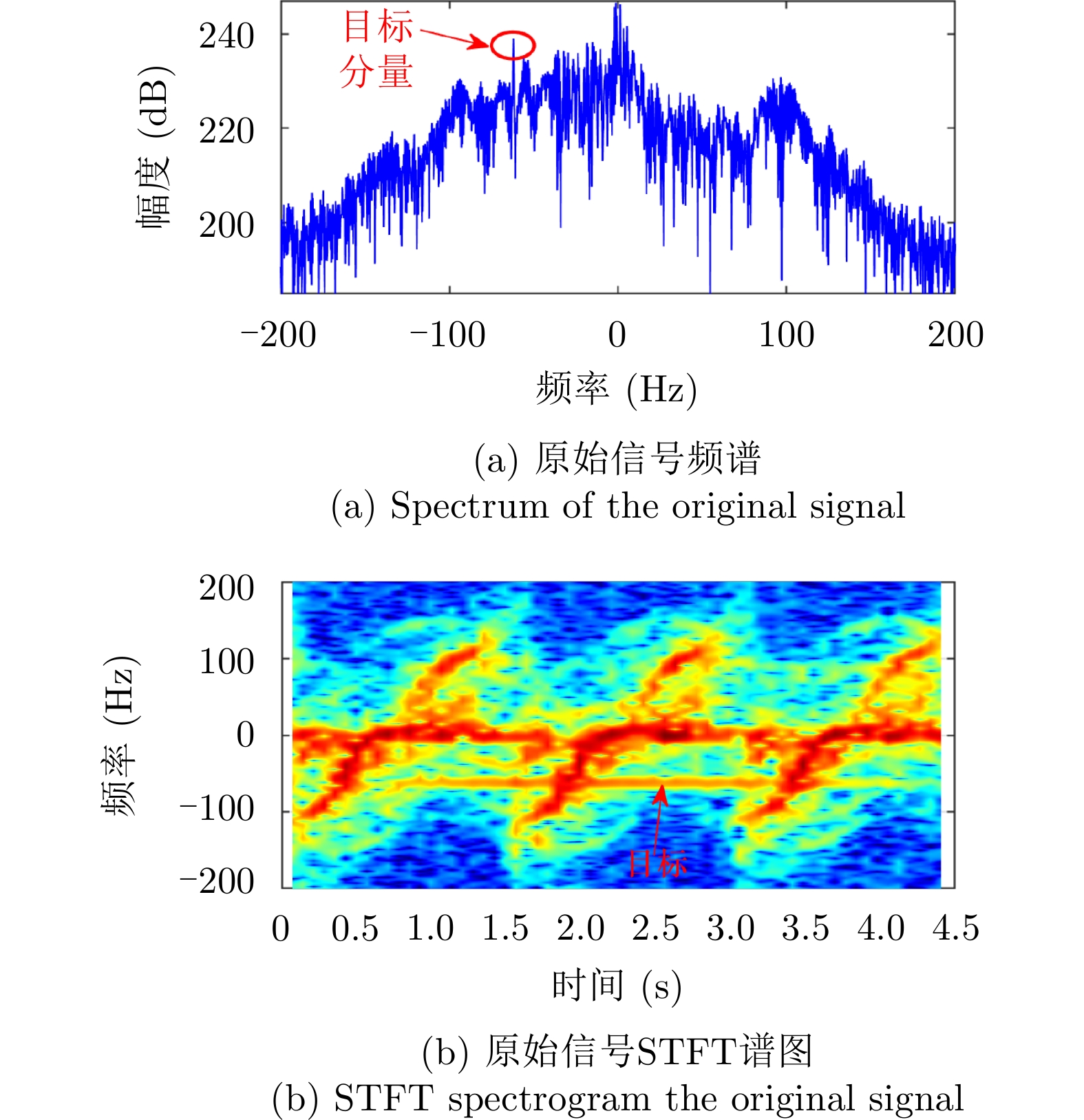
图 7 旋转叶片微动杂波仿真信号的频谱和STFT谱图
Figure 7. Spectrum and STFT spectrogram of the rotating blade micro-motion clutter simulation signal

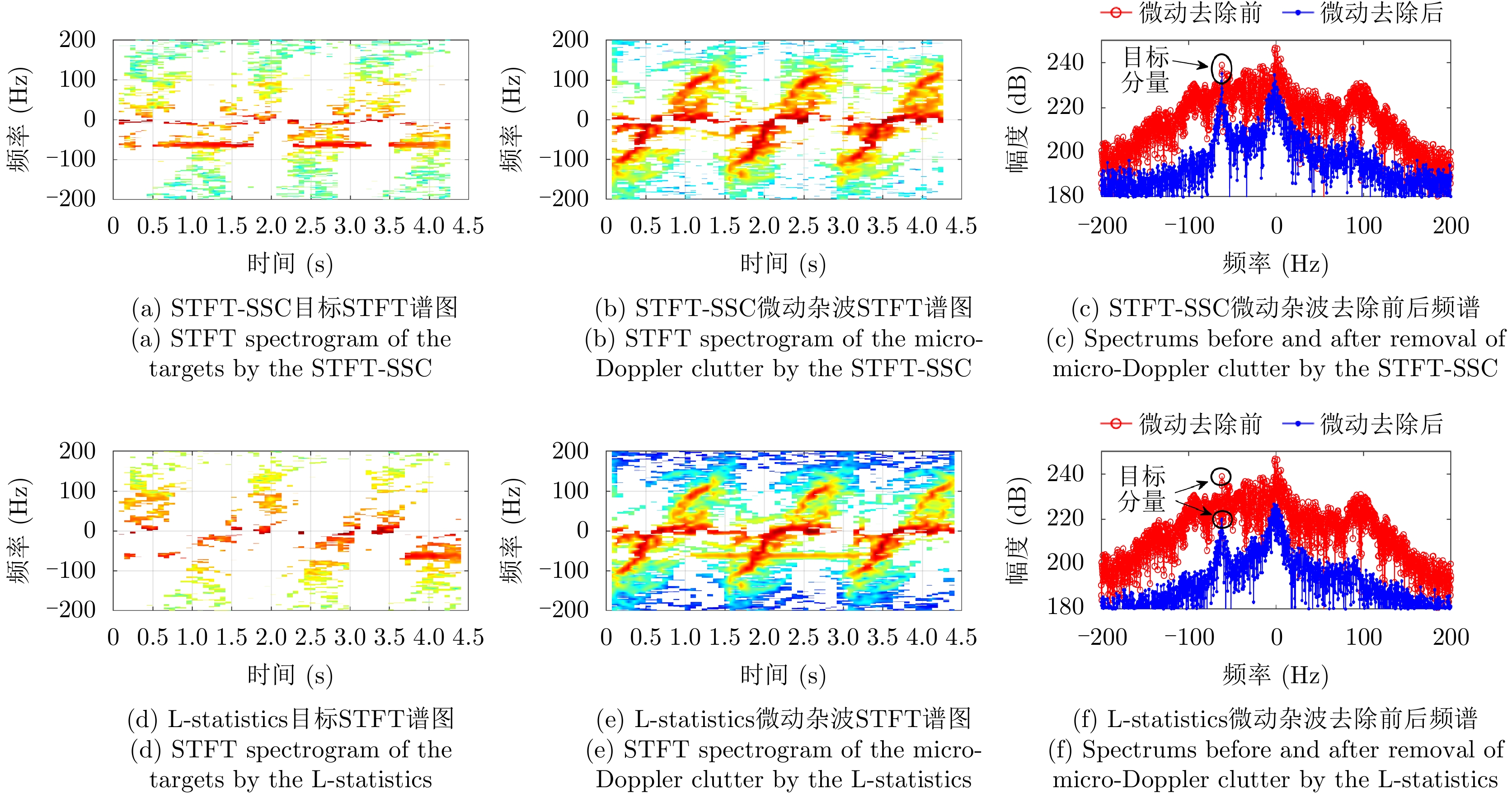
图 8 STFT-SSC和L-statistics算法旋转叶片微动杂波处理结果对比
Figure 8. Comparison of the processing results between the STFT-SSC and L-statistics for rotating blade micro-motion clutter
-
[1] CHEN V C, LI Fayin, HO S S, et al. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. doi: 10.1109/TAES.2006.1603402 [2] 张群, 胡健, 罗迎, 等. 微动目标雷达特征提取、成像与识别研究进展[J]. 雷达学报, 2018, 7(5): 531–547. doi: 10.12000/JR18049ZHANG Qun, HU Jian, LUO Ying, et al. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions[J]. Journal of Radars, 2018, 7(5): 531–547. doi: 10.12000/JR18049 [3] 苏宁远, 陈小龙, 关键, 等. 基于卷积神经网络的海上微动目标检测与分类方法[J]. 雷达学报, 2018, 7(5): 565–574. doi: 10.12000/JR18077SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565–574. doi: 10.12000/JR18077 [4] LI Gang, ZHANG Rui, RITCHIE M, et al. Sparsity-driven micro-Doppler feature extraction for dynamic hand gesture recognition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(2): 655–665. doi: 10.1109/TAES.2017.2761229 [5] JACKSON C A. Windfarm characteristics and their effect on radar systems[C]. 2007 IET International Conference on Radar Systems, Edinburgh, UK, 2007: 1–6. [6] 何炜琨, 吴仁彪, 王晓亮, 等. 风电场对雷达设备的影响评估与干扰抑制技术研究现状与展望[J]. 电子与信息学报, 2017, 39(7): 1748–1758. doi: 10.11999/JEIT161004HE Weikun, WU Renbiao, WANG Xiaoliang, et al. The review and prospect on the influence evaluation and interference suppression of wind farms on the radar equipment[J]. Journal of Electronic &Information Technology, 2017, 39(7): 1748–1758. doi: 10.11999/JEIT161004 [7] TUSZYNSKI M, WOJTKIEWICZ A, and KLEMBOWSKI W. Bimodal clutter MTI filter for staggered PRF radars[C]. IEEE International Conference on Radar, Arlington, USA, 1990: 176–180. [8] COLONE F, O’HAGAN D W, LOMBARDO P, et al. A multistage processing algorithm for disturbance removal and target detection in passive bistatic radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(2): 698–722. doi: 10.1109/TAES.2009.5089551 [9] ZHAN Weijie, YI Jianxin, and WAN Xianrong. Recognition and mitigation of micro-Doppler clutter in radar systems via support vector machine[J]. IEEE Sensors Journal, 2020, 20(2): 918–930. doi: 10.1109/JSEN.2019.2943152 [10] 夏鹏, 万显荣, 易建新. 外辐射源雷达目标旋转部件微动参数估计[J]. 电波科学学报, 2016, 31(4): 676–682. doi: 10.13443/j.cjors.2015082101XIA Peng, WAN Xianrong, and YI Jianxin. Micromotion parameters estimation for rotating structures on target in passive radar[J]. Chinese Journal of Radio Science, 2016, 31(4): 676–682. doi: 10.13443/j.cjors.2015082101 [11] 胡旭超, 谭贤四, 曲智国, 等. 风电场雷达杂波动态重构抑制方法[J]. 航空学报, 2020, 41(1): 323269. doi: 10.7527/S1000-6893.2019.23269HU Xuchao, TAN Xiansi, QU Zhiguo, et al. Wind turbine clutter suppression method based on dynamic reconstruction[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 323269. doi: 10.7527/S1000-6893.2019.23269 [12] STANKOVIC L, DAKOVIC M, THAYAPARAN T, et al. Inverse radon transform-based micro-Doppler analysis from a reduced set of observations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 1155–1169. doi: 10.1109/TAES.2014.140098 [13] 何其芳, 张群, 罗迎, 等. 正弦调频Fourier-Bessel变换及其在微动目标特征提取中的应用[J]. 雷达学报, 2018, 7(5): 593–601. doi: 10.12000/JR17069HE Qifang, ZHANG Qun, LUO Ying, et al. A sinusoidal frequency modulation Fourier-Bessel transform and its application to micro-Doppler feature extraction[J]. Journal of Radars, 2018, 7(5): 593–601. doi: 10.12000/JR17069 [14] LI Hongzhi, ZHANG Wenxuan, WANG Yong, et al. Method for micro-Doppler separation in ISAR imaging based on discrete sinusoidal frequency-modulated transform[J]. Journal of Applied Remote Sensing, 2020, 14(3): 036502. doi: 10.1117/1.JRS.14.036502 [15] BAI Xueru, XING Mengdao, ZHOU Feng, et al. Imaging of micromotion targets with rotating parts based on empirical-mode decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(11): 3514–3523. doi: 10.1109/TGRS.2008.2002322 [16] YUAN Bin, CHEN Zengping, and XU Shiyou. Micro-Doppler analysis and separation based on complex local mean decomposition for aircraft with fast-rotating parts in ISAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1285–1298. doi: 10.1109/TGRS.2013.2249588 [17] CHOI I, KANG K, KIM K, et al. Use of ICA to separate micro-Doppler signatures in ISAR images of aircraft that has fast-rotating parts[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(1): 234–246. doi: 10.1109/TAES.2021.3098110 [18] 罗亚宗, 冯有前, 李松, 等. 基于距离最近原则的微多普勒曲线分离和特征提取[J]. 科学技术与工程, 2014, 14(30): 186–190. doi: 10.3969/j.issn.1671-1815.2014.30.038LUO Yazong, FENG Youqian, LI Song, et al. Micro-Doppler curve separation and feature extraction based on the principle of the closest distance[J]. Science Technoloy and Engineering, 2014, 14(30): 186–190. doi: 10.3969/j.issn.1671-1815.2014.30.038 [19] 彭正红, 杨德贵, 王行, 等. 基于趋势估计的微多普勒分离与特征提取算法[J]. 系统工程与电子技术, 2021, 43(12): 3452–3461. doi: 10.12305/j.issn.1001-506X.2021.12.05PENG Zhenghong, YANG Degui, WANG Xing, et al. Micro-Doppler separation and feature extraction algorithm based on trend estimation[J]. System Engineering and Electronic, 2021, 43(12): 3452–3461. doi: 10.12305/j.issn.1001-506X.2021.12.05 [20] STANKOVIC L, THAYAPARAN T, DAKOVIC M, et al. Micro-Doppler removal in the radar imaging analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1234–1250. doi: 10.1109/TAES.2013.6494410 [21] STANKOVIĆ L, POPOVIĆ-BUGARIN V, and RADENOVIĆ F. Genetic algorithm for rigid body reconstruction after micro-Doppler removal in the radar imaging analysis[J]. Signal Processing, 2013, 93(7): 1921–1932. doi: 10.1016/j.sigpro.2013.01.005 [22] ALLEN J. Short term spectral analysis, synthesis, and modification by discrete Fourier transform[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1977, 25(3): 235–238. doi: 10.1109/TASSP.1977.1162950 [23] STANKOVIĆ L, DAKOVIĆ M, and THAYAPARAN T. Time-Frequency signal analysis with applications[M]. Boston: Artech House, 2013: 81–96. [24] BOASHASH B. Estimating and interpreting the instantaneous frequency of a signal-I. Fundamentals[J]. Proceedings of the IEEE, 1992, 80(4): 520–538. doi: 10.1109/5.135376 [25] 陈永彬, 李少东, 杨军, 等. 旋翼叶片回波建模与闪烁现象机理分析[J]. 物理学报, 2016, 65(13): 138401. doi: 10.7498/aps.65.138401CHEN Yongbin, LI Shaodong, YANG Jun, et al. Rotor blades echo modeling and mechanism analysis of flashes phenomena[J]. Acta Physica Sinica, 2016, 65(13): 138401. doi: 10.7498/aps.65.138401 [26] 占伟杰, 万显荣, 易建新, 等. 外辐射源雷达目标扇叶微多普勒效应实验研究[J]. 系统工程与电子技术, 2021, 43(6): 1468–1476. doi: 10.12305/j.issn.1001-506X.2021.06.03ZHAN Weijie, WAN Xianrong, YI Jianxin, et al. Experimental study on micro-Doppler effect of target blades in passive radar[J]. Systems Engineering and Electronics, 2021, 43(6): 1468–1476. doi: 10.12305/j.issn.1001-506X.2021.06.03 [27] CRESPO-BALLESTEROS M, ANTONIOU M, and CHERNIAKOV M. Wind turbine blade radar signatures in the near field: Modeling and experimental confirmation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1916–1931. doi: 10.1109/TAES.2017.2675241 -



 下载:
下载:


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

