
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
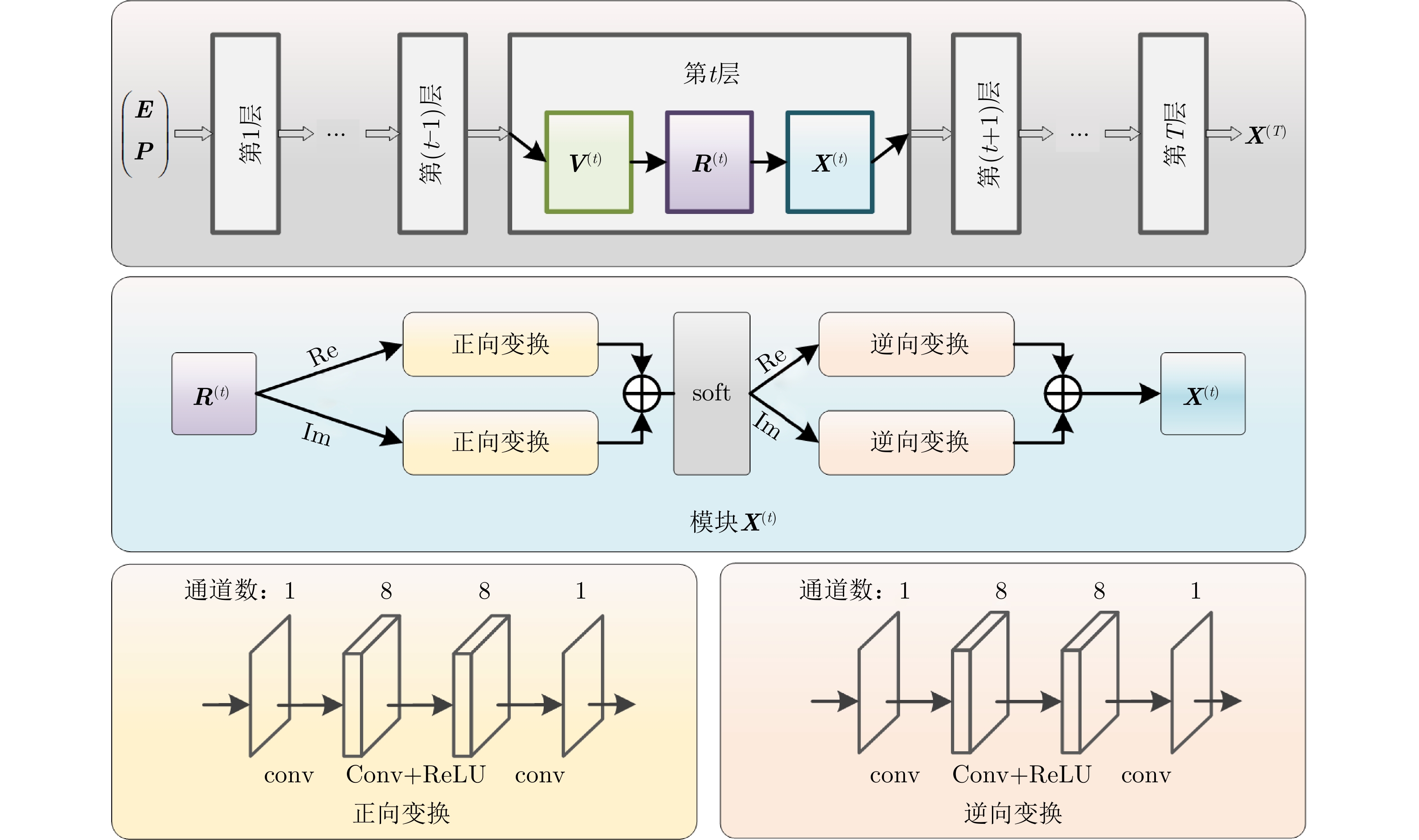
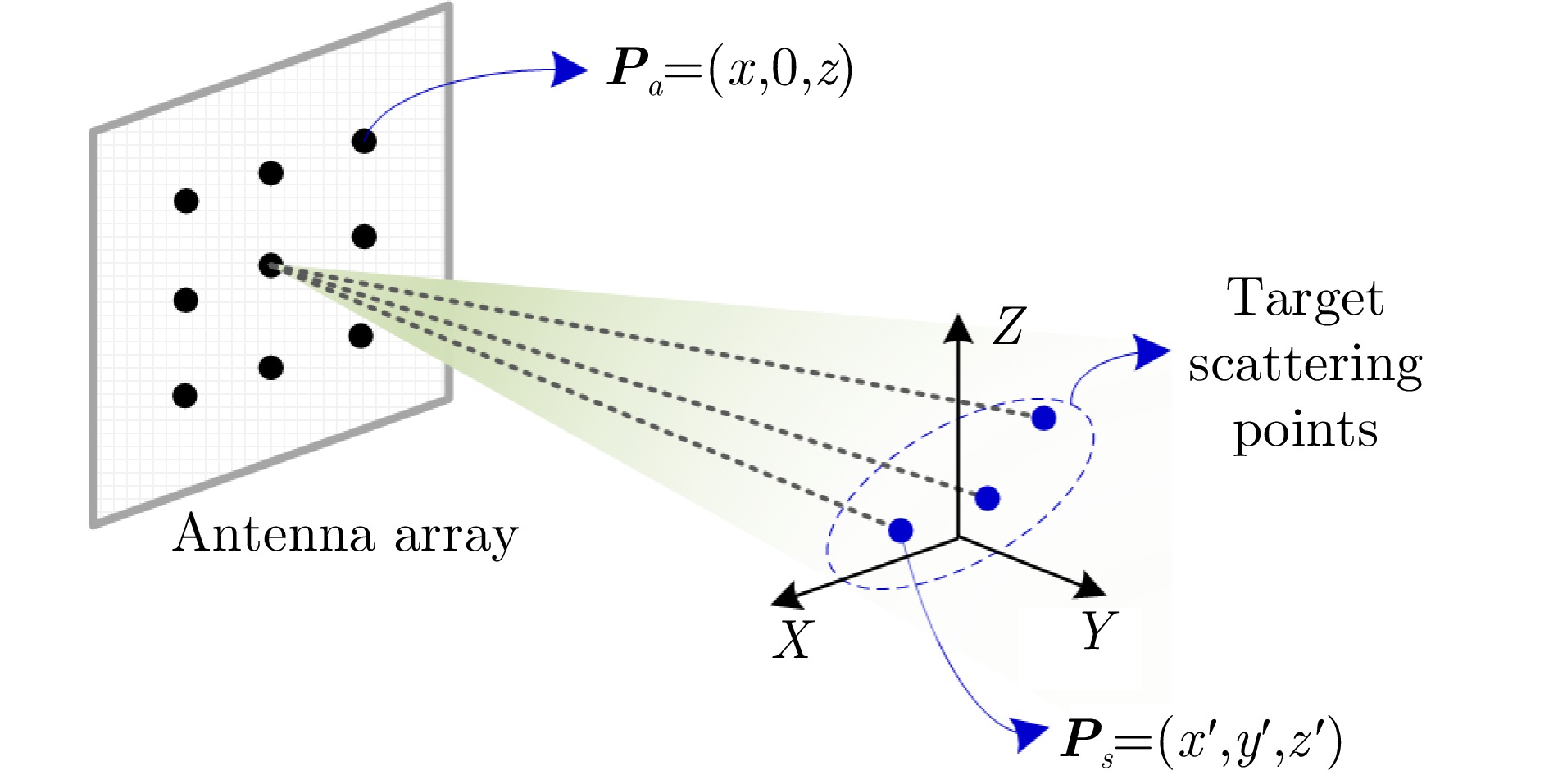
摘要: 合成孔径雷达三维成像技术(3D SAR)能通过孔径维度扩展实现三维成像能力,但数据维度大、系统实现难、成像分辨率低。压缩感知稀疏重构技术在简化3D SAR系统、提升成像质量等方面展现出巨大潜力,但面临计算复杂度高、参数设置困难、弱稀疏场景适应差等新问题,制约了其实际应用。针对上述问题,该文结合卷积神经网络的特征学习及迭代算法的深度展开理论,提出了基于自学习稀疏先验的3D SAR成像方法。首先,探讨了常规3D SAR稀疏成像中矩阵向量线性表征模型的局限性,引入成像算子提升成像算法处理效率。其次,讨论了迭代算法映射网络的深度展开模型和实现方式,包括网络拓扑结构设计、算法参数的优化约束及网络的训练方法。最后,通过仿真数据和地面实验,证明了所提方法在提升成像精度的同时,其运行时间较传统稀疏成像算法降低一个数量级。Abstract: The development of 3D Synthetic Aperture Radar (SAR) imaging is currently hampered by issues such as high data dimension, high system complexity, and low imaging processing efficiency. Sparse SAR imaging has grown in importance as a research branch in SAR imaging due to the high potential of sparse signal processing techniques based on Compressed Sensing (CS) to show high potential in reducing system complexity and improving imaging quality. However, traditional sparse imaging methods are still constrained by high computational complexity, nontrivial parameter tuning, and poor adaptability to weakly sparse scenes. To address these issues, we propose a new 3D SAR imaging method based on learned sparse priors inspired by the deep unfolding concept. First, the limitations of the matrix-vector linear representation model are discussed, and an imaging operator is introduced to improve the algorithm’s imaging efficiency. Furthermore, this research focuses on algorithm network details, such as network topology design, the problem of complex-valued propagations, optimization constraints of algorithm parameters, and network training details. Finally, through simulations and measured experiments, it is proved that the proposed method can improve the imaging accuracy while reducing the running time by more than one order of magnitude compared with the conventional sparse imaging algorithms.
-
Key words:
- 3D SAR /
- Deep learning /
- Deep unfolding /
- Sparse representation /
- Sparse imaging
-
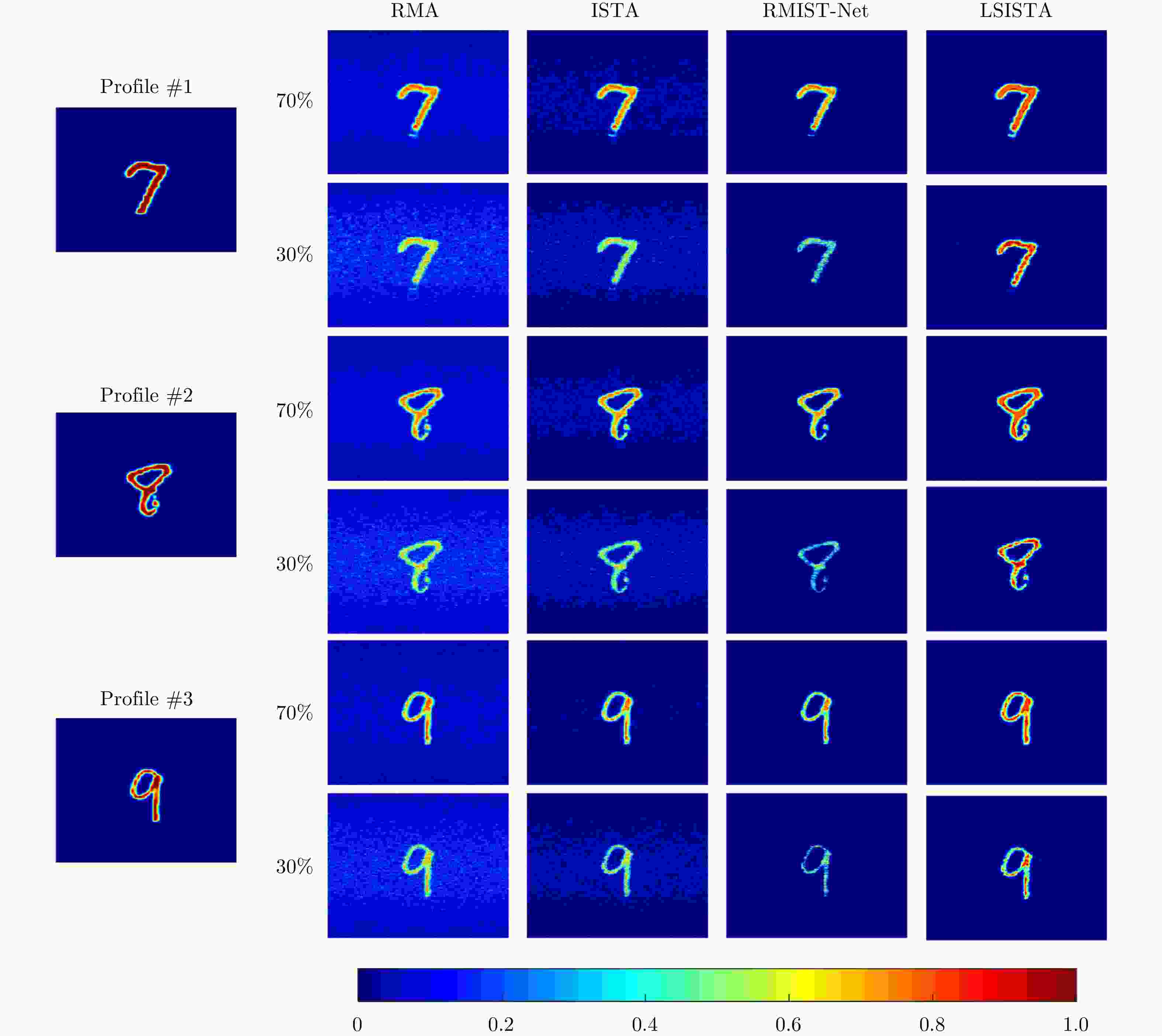
图 3 各算法在采样率分别为70%和30%时的重构结果
Figure 3. Reconstructions of different algorithms in cases of sampling rate being 70% and 30%, respectively
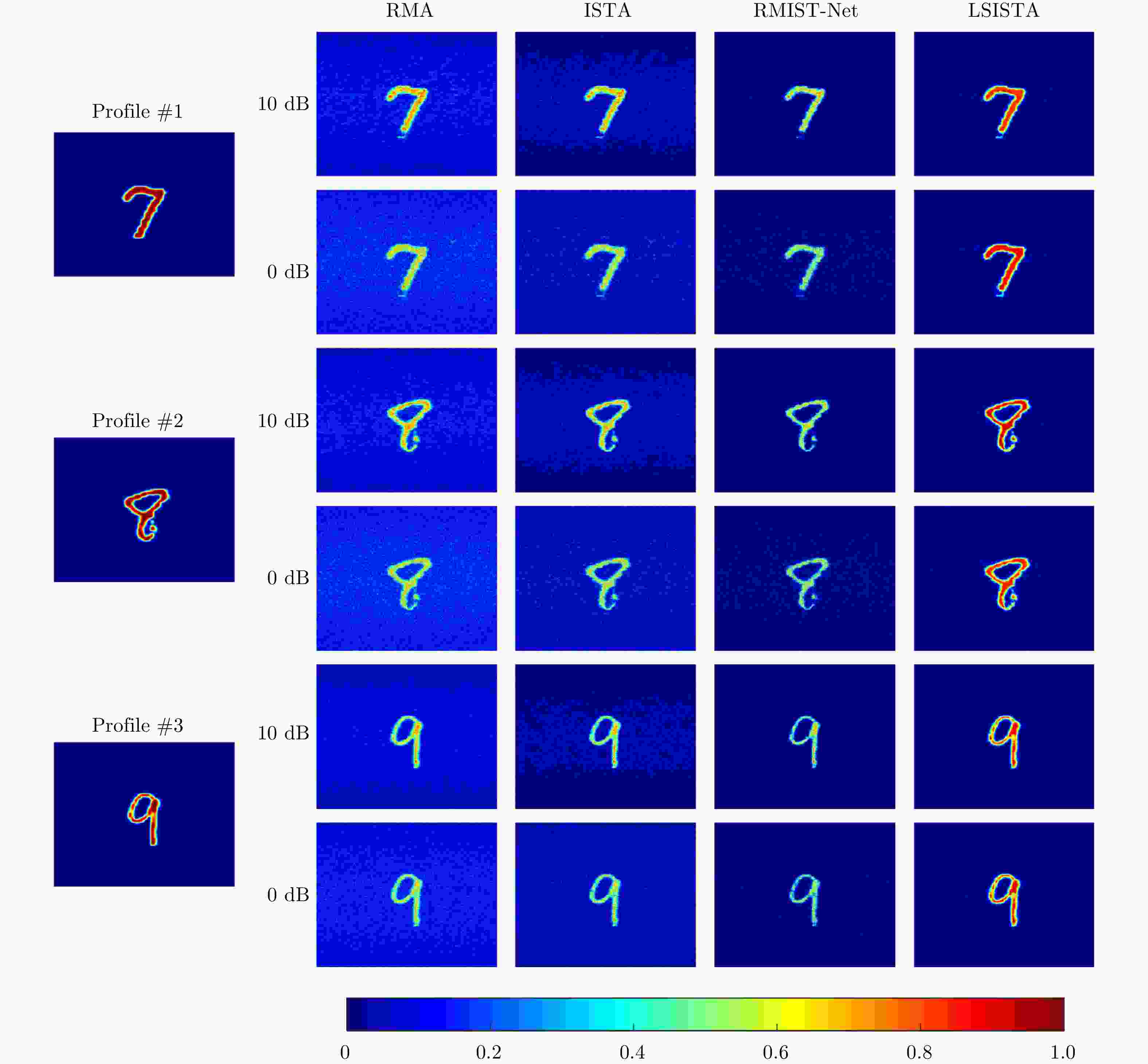
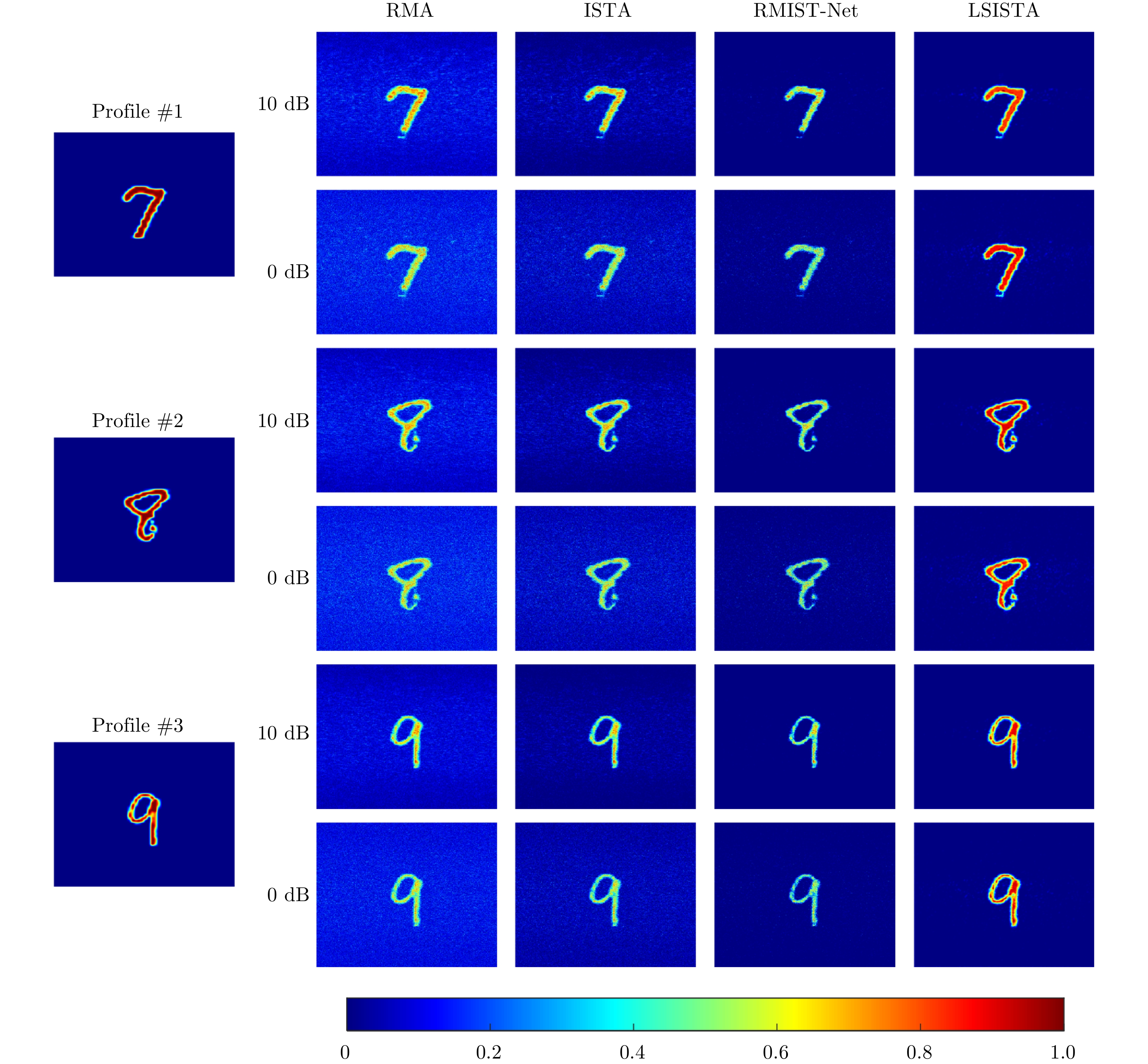
图 4 各算法在SNR分别为10 dB和0 dB时的重构结果
Figure 4. Reconstructions of different algorithms in cases of SNR being 10 dB and 0 dB, respectively
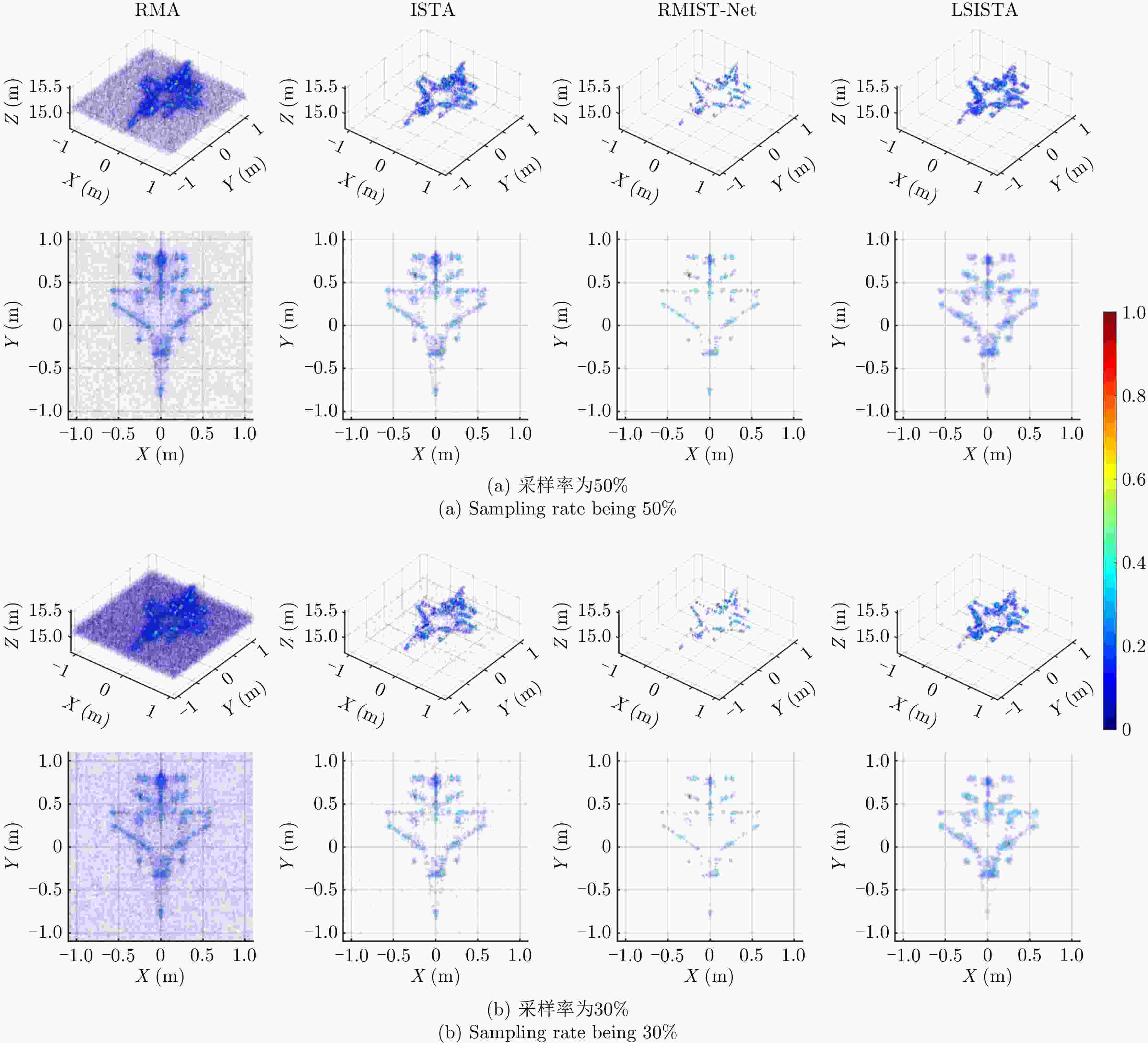
图 6 各算法在采样率为50%和30%时的三维仿真成像结果
Figure 6. 3D imaging results of different algorithms in cases of sampling rate being 50% and 30%
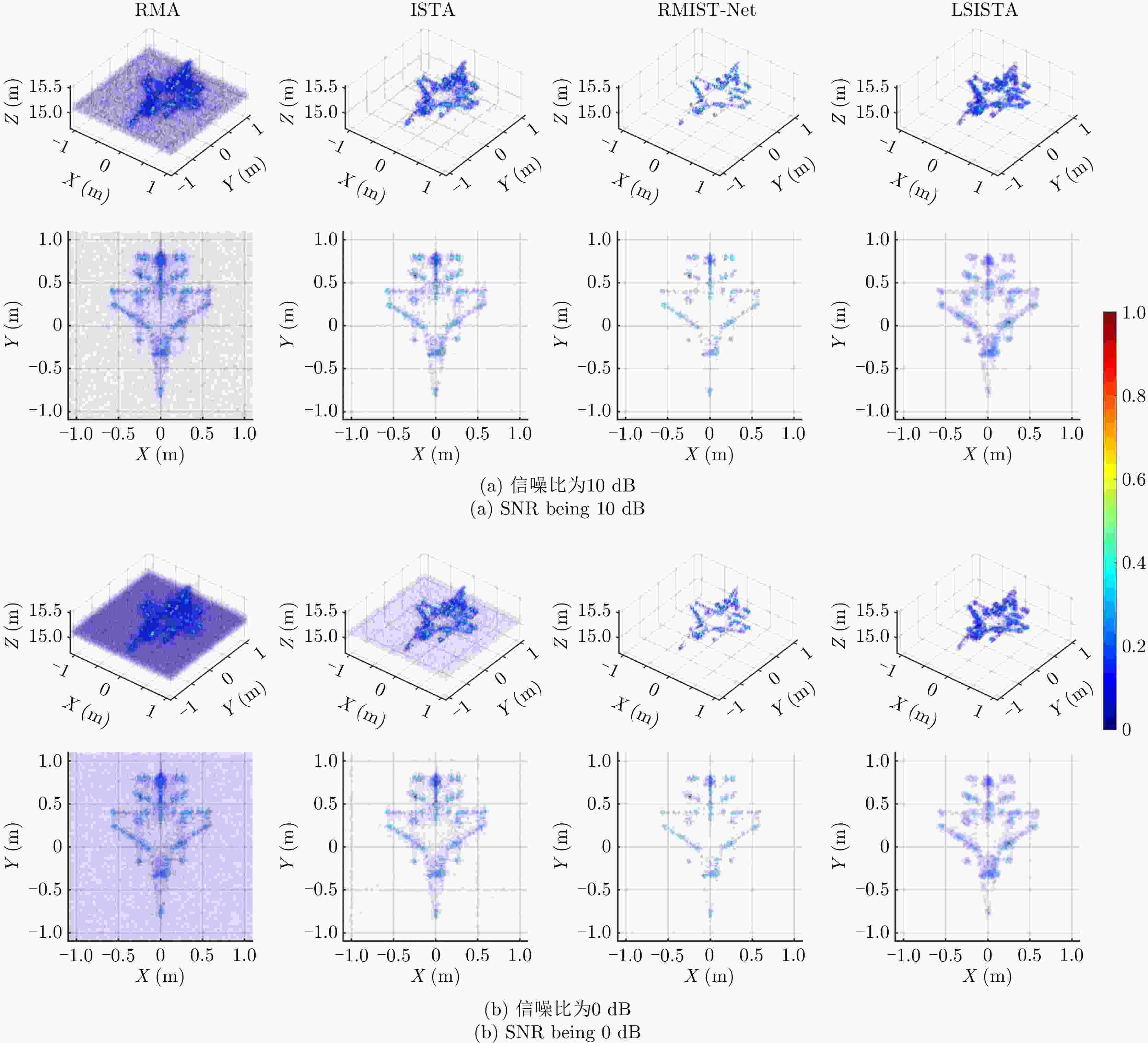
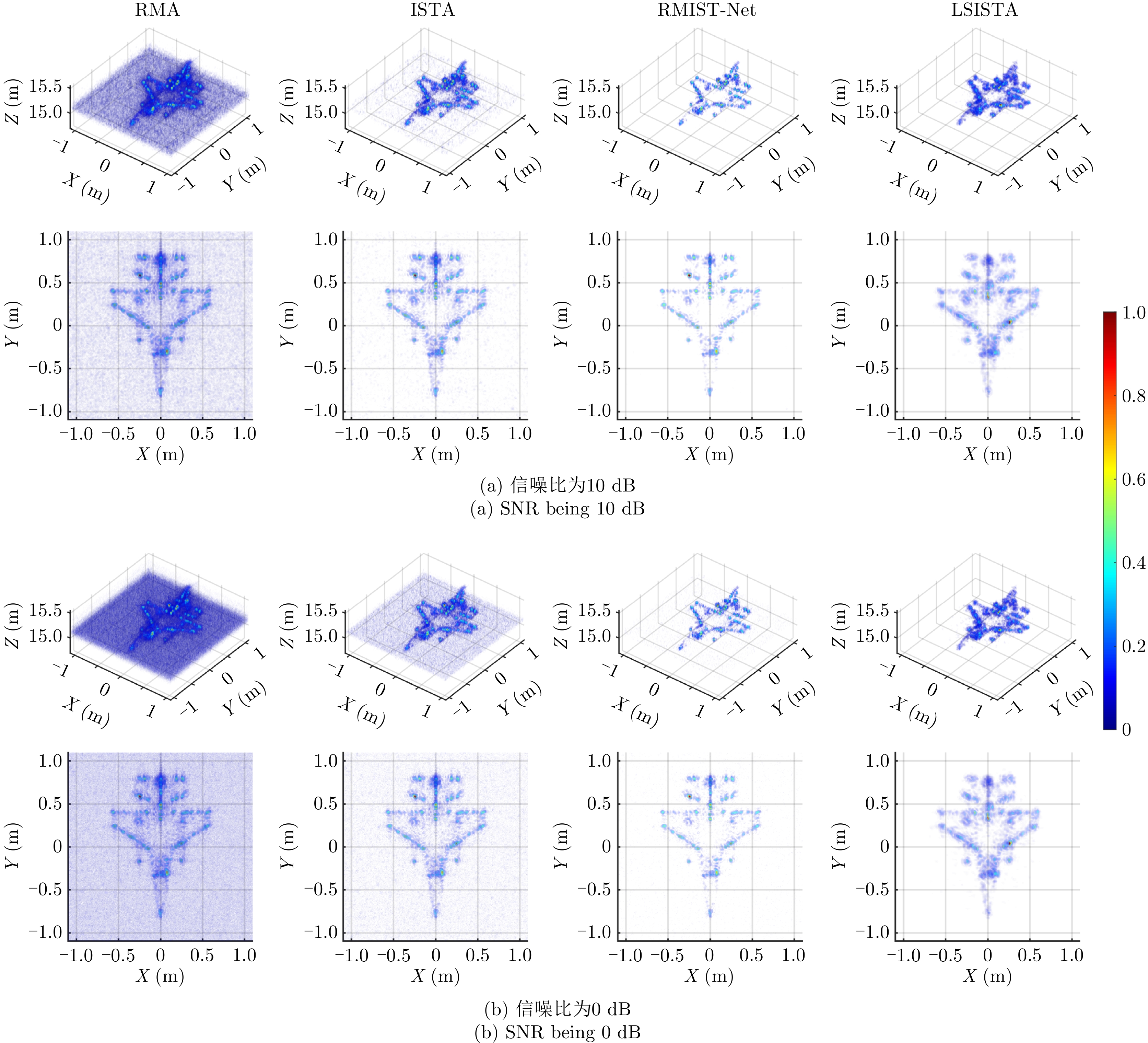
图 7 各算法在信噪比分别为10 dB和0 dB时的三维仿真成像结果
Figure 7. 3D imaging results of different algorithms in cases of SNR being 10 dB and 0 dB

图 9 各算法在采样率为50%和30%时钢片测试板的三维成像结果
Figure 9. 3D imaging results of the testing steel chip by different algorithms when sampling rate are 50% and 30%

图 10 各算法在采样率为50%和30%时隐匿刀具的成像结果
Figure 10. Imaging results of conceal knives by different algorithms when sampling rate are 50% and 30%

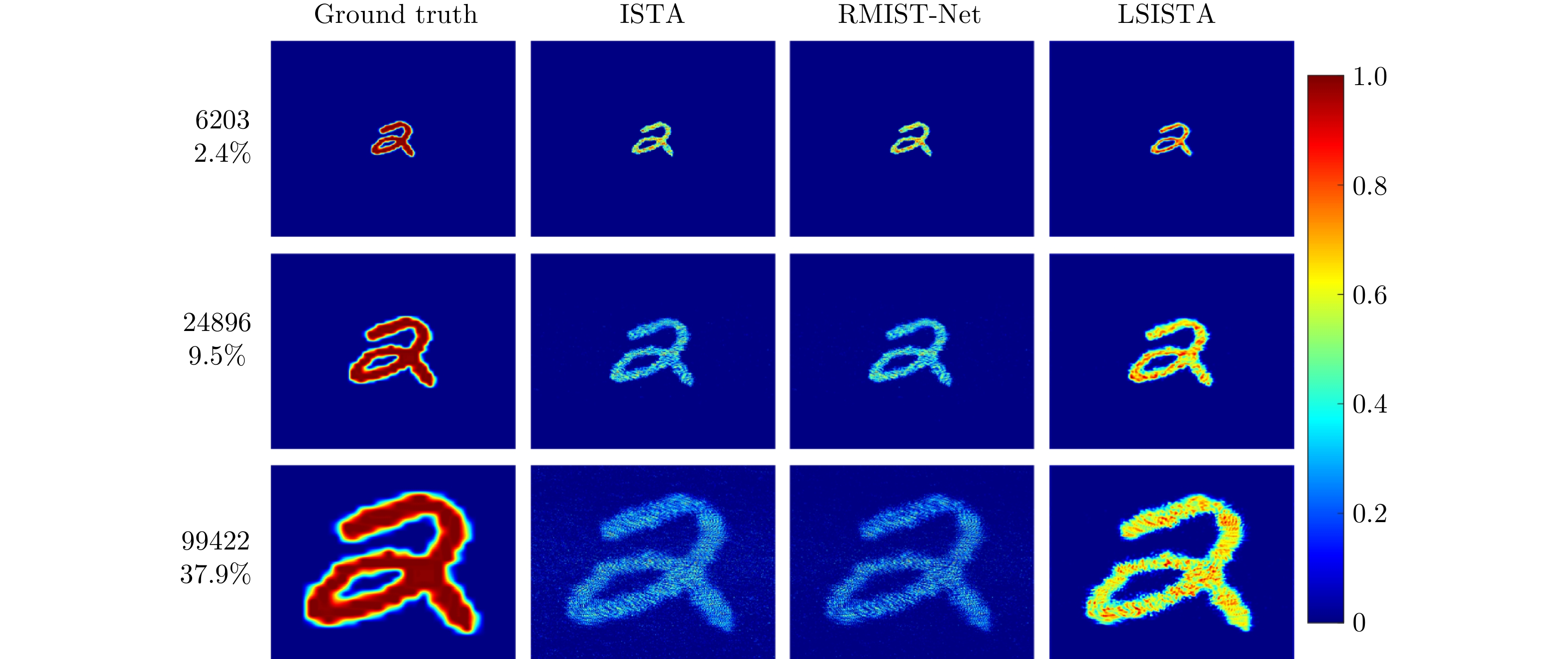
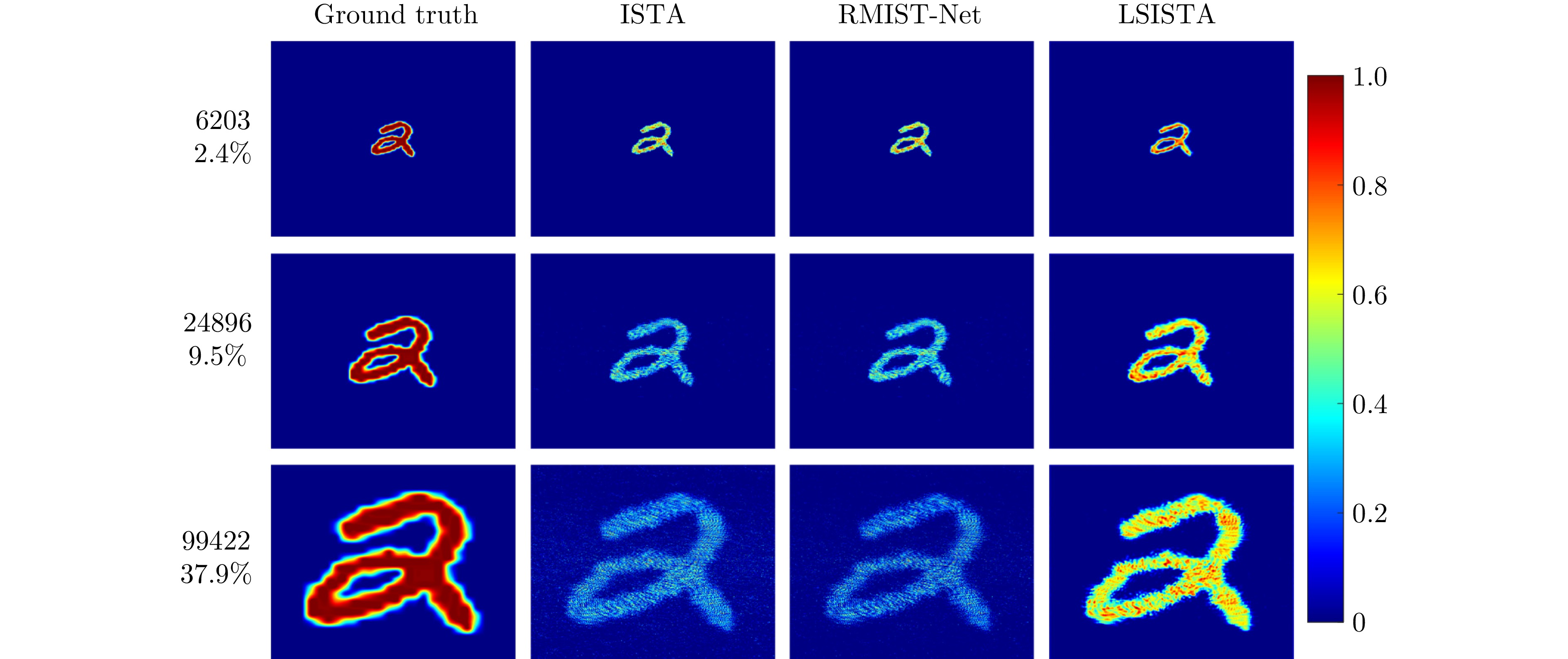
图 11 各稀疏成像算法在不同目标点数时的成像结果
Figure 11. Imaging results of different algorithms in cases of the different number of scatterers

图 3 Reconstructions of different algorithms in cases of sampling rate being 70% and 30%, respectively

图 4 Reconstructions of different algorithms in cases of SNR being 10 and 0 dB, respectively

图 6 Imaging results of different algorithms in cases of sampling rate being 50% and 30%

图 9 3D Imaging results of the testing steel chip by different algorithms when sampling rates are 50% and 30%

图 10 Imaging results of conceal knives by different algorithms when sampling rates are 50% and 30%

图 11 Imaging results of different algorithms in cases of different numbers of scatterers
算法1 基于核函数的ISTA稀疏成像算法 Alg. 1 ISTA sparse imaging algorithm based on
kernel functions输入:稀疏降采样回波E,相位传播矩阵P,迭代步长$\tau $,迭代
层数T输出:稀疏成像结果$ {{\boldsymbol{X}}^{\left( T \right)}} $ 初始化:$t = 1$, ${{\boldsymbol{X}}^{\left( 0 \right)}} = {\mathcal{M}^{\text{H}}}\left( {{\boldsymbol{E}},{{\bar {\boldsymbol{P}}}}} \right)$; 循环开始 (1) 更新迭代残差:$ {{\boldsymbol{V}}^{\left( t \right)}} = {\boldsymbol{E}} - \mathcal{M}\left( {{{\boldsymbol{X}}^{\left( {t - 1} \right)}},{\boldsymbol{\bar P}}} \right) $; (2) 梯度下降粗估计:$ {{\boldsymbol{R}}^{\left( t \right)}} = {{\boldsymbol{X}}^{\left( {t - 1} \right)}} + \tau {\mathcal{M}^{\text{H}}}\left( {{{\boldsymbol{V}}^{\left( t \right)}},{\boldsymbol{P}}} \right) $; (3) 软阈值收缩去噪: ${ {\boldsymbol{X} }^{\left( t \right)} } = {{\rm{soft}}} \left( { { {\boldsymbol{R} }^{\left( t \right)} },\lambda } \right)$, $t = t + 1$; (4) 迭代判定:若$t \le T$,则重复步骤(1)—步骤(4);否则,结束循环。 循环结束  下载: 导出CSV
下载: 导出CSV
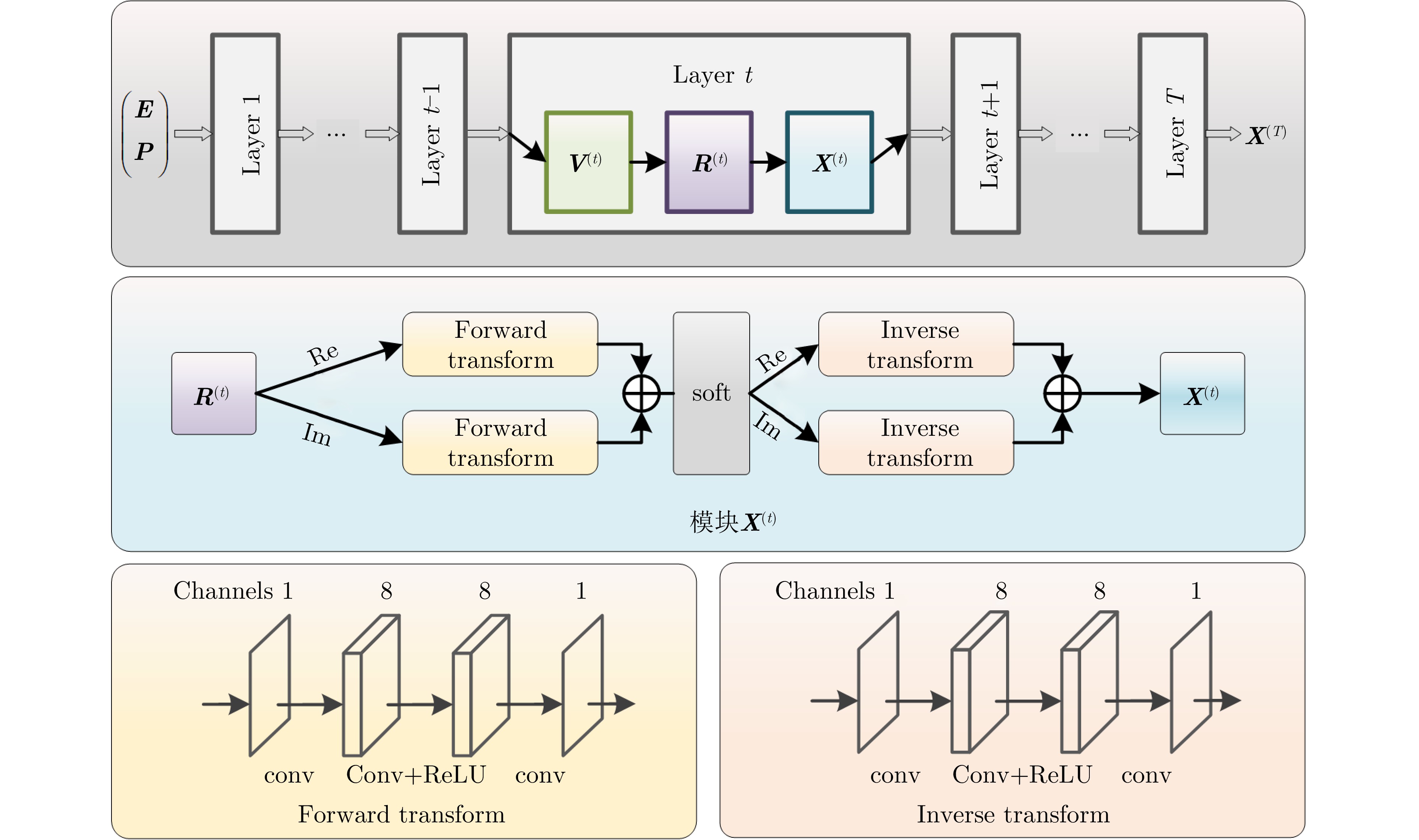
算法2 LSISTA网络稀疏成像算法 Alg. 2 LSISTA network-based sparse imaging algorithm 输入:稀疏降采样回波E,相位传播矩阵P; 输出:稀疏成像结果$ {{\boldsymbol{X}}^{\left( T \right)}} $ 初始化:加载卷积核预训练权重,$ \left\{ {{w_1},{b_1},{w_2},{b_2}} \right\} $; 循环开始 (1) 根据式(14),由$ \left\{ {{w_1},{b_1},{w_2},{b_2}} \right\} $计算$ {\tau ^{\left( t \right)}} $和$ {\lambda ^{\left( t \right)}} $; (2) 更新迭代残差:$ {{\boldsymbol{V}}^{\left( t \right)}} = {\boldsymbol{E}} - \mathcal{M}\left( {{{\boldsymbol{X}}^{\left( {t - 1} \right)}},{\boldsymbol{\bar P}}} \right) $; (3) 梯度下降粗估计:$ {{\boldsymbol{R}}^{\left( t \right)}} = {{\boldsymbol{X}}^{\left( {t - 1} \right)}} + {\tau ^{\left( t \right)}}{\mathcal{M}^{\text{H}}}\left( {{{\boldsymbol{V}}^{\left( t \right)}},{\boldsymbol{P}}} \right) $; (4) 软阈值收缩去噪:
${ {\boldsymbol{X} }^{\left( t \right)} } = \tilde {\mathcal{T} }\left( {{\rm{soft}}} \left( {\mathcal{T}\left( { { {\boldsymbol{R} }^{\left( t \right)} } } \right),{\lambda ^{\left( t \right)} } } \right) \right)$, $t = t + 1$;(5) 迭代判定:若$t \le T$,则重复步骤(1)—步骤(5);否则,结束循环。 循环结束
下载: 导出CSV
表 1 各算法在不同采样率情况下的MAE值
Table 1. MAEs of different algorithms in cases of sampling rate being 70% and 30%, respectively
算法 Profile #1 Profile #2 Profile #3 70% 30% 70% 30% 70% 30% RMA 0.064 0.104 0.075 0.118 0.063 0.105 ISTA 0.024 0.038 0.037 0.058 0.025 0.041 RMIST-Net 0.014 0.022 0.023 0.034 0.015 0.024 LSISTA 0.005 0.012 0.006 0.017 0.005 0.013
下载: 导出CSV
表 2 各算法在不同SNR情况下的MAE值
Table 2. MAEs of different algorithms in cases of SNR being 10 dB and 0 dB, respectively
算法 Profile #1 Profile #2 Profile #3 10 dB 0 dB 10 dB 0 dB 10 dB 0 dB RMA 0.089 0.118 0.102 0.135 0.085 0.118 ISTA 0.038 0.071 0.056 0.093 0.038 0.072 RMIST-Net 0.018 0.026 0.030 0.046 0.020 0.029 LSISTA 0.005 0.008 0.006 0.015 0.005 0.009
下载: 导出CSV
表 3 仿真和实测系统参数
Table 3. Parameters in simulations and real experiments
参数 三维SAR仿真值 实测系统值 载频(GHz) 77 78.8 带宽(GHz) 4 3.6 孔径尺寸(cm) 100×100 40×40 采样间隔(mm) x : 7.8; z : 7.8 x : 1; z : 2 距离(m) 15 具体指定
下载: 导出CSV
表 4 三维SAR成像仿真在不同降采样率下各算法的图像熵评估
Table 4. Image entropy of different algorithms with different sampling rates in simulated 3D SAR imaging
算法 50% 30% Time (s) (CPU/GPU) RMA 2.757 3.128 0.336/— ISTA 0.363 0.387 13.561/— RMIST-Net 0.087 0.062 1.522/0.026 LSISTA 0.299 0.289 7.054/0.033
下载: 导出CSV
表 5 三维SAR成像仿真在信噪比下各算法的图像熵评估
Table 5. Image entropy of different algorithms with different SNRs in simulated 3D SAR imaging
算法 10 dB 0 dB Time (s) (CPU/GPU) RMA 2.789 3.155 0.337/— ISTA 0.548 0.884 14.523/— RMIST-Net 0.377 0.632 1.630/0.030 LSISTA 0.379 0.419 6.931/0.036
下载: 导出CSV
表 6 图9成像实验中各算法的图像熵评估
Table 6. Image entropy of different algorithms in the experiment of Fig. 9
算法 50% 30% Time (s) (CPU/GPU) RMA 4.530 4.761 0.176/— ISTA 1.125 0.948 6.604/— RMIST-Net 0.749 0.584 0.156/0.010 LSISTA 0.586 0.429 3.461/0.013
下载: 导出CSV
表 7 图10成像实验中各算法的图像熵评估
Table 7. Image entropy of different algorithms in the experiment of Fig. 10
算法 50% 30% Time (s) (CPU/GPU) RMA 6.141 5.960 0.135/— ISTA 3.567 3.058 6.086/— RMIST-Net 2.719 2.159 0.115/ 0.009 LSISTA 2.376 1.845 3.103/0.013
下载: 导出CSV
表 8 各算法计算复杂度
Table 8. Computational complexity of different algorithms
算法 FLOPs RMA ${N_y}{N_s}\left( {10{{\log }_2}{N_s} + 12} \right)$ ISTA ${N_{{\rm{iter}}} }{N_y}{N_s}\left( {10{ {\log }_2}{N_s} + 12} \right)$ RMIST-Net $ T{N_y}{N_s}\left( {10{{\log }_2}{N_s} + 12} \right) $ LSISTA $ T{N_s}\left( {{N_y}\left( {10{{\log }_2}{N_s} + 12} \right) + 2846} \right) $
下载: 导出CSV
表 9 各算法在不同目标点数时的MAE评估值
Table 9. MAEs in cases of the different number of target points
目标点数 ISTA RMIST-Net LSISTA 99422 (37.9%)0.125 0.121 0.094 24896 (9.5%)0.027 0.026 0.022 6203 (2.4%)0.005 0.005 0.003
下载: 导出CSV
1 ISTA sparse imaging algorithm based on kernel functions.
Input: Sparse undersampled echo E , phase propagation matrix
P , iteration step size $\tau $, number of iterations T ;Output: Sparse imaging result $ {{\boldsymbol{X}}^{\left( T \right)}} $; Initialization: $t = 1$, ${{\boldsymbol{X}}^{\left( 0 \right)}} = {\mathcal{M}^{\text{H}}}\left( {{\boldsymbol{E}},{\boldsymbol{\bar P}}} \right)$; For $t = 1,2, \cdots $ do (1) Update iteration residual: $ {{\boldsymbol{V}}^{\left( t \right)}} = {\boldsymbol{E}} - \mathcal{M}\left( {{{\boldsymbol{X}}^{\left( {t - 1} \right)}},{\boldsymbol{\bar P}}} \right) $; (2) Gradient descent coarse estimate:
$ {{\boldsymbol{R}}^{\left( t \right)}} = {{\boldsymbol{X}}^{\left( {t - 1} \right)}} + \tau {\mathcal{M}^{\text{H}}}\left( {{{\boldsymbol{V}}^{\left( t \right)}},{\boldsymbol{P}}} \right) $;(3) Soft thresholding denoising: $ {{\boldsymbol{X}}^{\left( t \right)}} = {{\mathrm{soft}}} \left( {{{\boldsymbol{R}}^{\left( t \right)}},\lambda } \right) $,
$t = t + 1$;(4) Iteration judgment: if $t \le T$, repeat steps (1)—(4);
otherwise, end the loop.End for
下载: 导出CSV
2 LSISTA network-based sparse imaging algorithm.
Input: Sparse undersampled echo E , phase propagation matrix
P ;Output: Sparse imaging result $ {{\boldsymbol{X}}^{\left( T \right)}} $; Initialization: Load pre-trained convolutional kernel weights $ \left\{ {{w_1},{b_1},{w_2},{b_2}} \right\} $; For $t = 1,2, \cdots $ do (1) Calculate $ {\tau ^{\left( t \right)}} $ and $ {\lambda ^{\left( t \right)}} $ based on Eq. (14) using
$ \left\{ {{w_1},{b_1},{w_2},{b_2}} \right\} $;(2) Update iteration residual: $ {{\boldsymbol{V}}^{\left( t \right)}} = {\boldsymbol{E}} - \mathcal{M}\left( {{{\boldsymbol{X}}^{\left( {t - 1} \right)}},{\boldsymbol{\bar P}}} \right) $; (3) Update iteration residual:
$ {{\boldsymbol{R}}^{\left( t \right)}} = {{\boldsymbol{X}}^{\left( {t - 1} \right)}} + {\tau ^{\left( t \right)}}{\mathcal{M}^{\text{H}}}\left( {{{\boldsymbol{V}}^{\left( t \right)}},{\boldsymbol{P}}} \right) $;(4) Update iteration residual:
$ {{\boldsymbol{X}}^{\left( t \right)}} = \tilde {\mathcal{T}}\left( {{{\mathrm{soft}}} \left( {\mathcal{T}\left( {{{\boldsymbol{R}}^{\left( t \right)}}} \right),{\lambda ^{\left( t \right)}}} \right)} \right) $, $t = t + 1$;(5) Iteration judgment: if $t \le T$, repeat steps (1)—(5);
otherwise, end the loop.End for
下载: 导出CSV
表 1 MAEs of different algorithms in cases of sampling rate being 70% and 30%, respectively
Algorithms Profile #1 Profile #2 Profile #3 70% 30% 70% 30% 70% 30% RMA 0.064 0.104 0.075 0.118 0.063 0.105 ISTA 0.024 0.038 0.037 0.058 0.025 0.041 RMIST-Net 0.014 0.022 0.023 0.034 0.015 0.024 LSISTA 0.005 0.012 0.006 0.017 0.005 0.013
下载: 导出CSV
表 2 MAEs of different algorithms in cases of sampling rate being 10 and 0 dB, respectively
Algorithms Profile #1 Profile #2 Profile #3 10 dB 0 dB 10 dB 0 dB 10 dB 0 dB RMA 0.089 0.118 0.102 0.135 0.085 0.118 ISTA 0.038 0.071 0.056 0.093 0.038 0.072 RMIST-Net 0.018 0.026 0.030 0.046 0.020 0.029 LSISTA 0.005 0.008 0.006 0.015 0.005 0.009
下载: 导出CSV
表 3 Parameters in simulations and real experiments
Parameter 3D SAR simulation
valueReal measurement
system valueCarrier frequency (GHz) 77 78.8 Bandwidth (GHz) 4 3.6 Aperture size (cm) 100 × 100 40 × 40 Sampling interval (mm) x: 7.8; z: 7.8 x: 1; z: 2 Range (m) 15 Specified
下载: 导出CSV
表 4 Image entropy of different algorithms with different sampling rates in simulated 3D SAR imaging
Algorithms 50% 30% Time (s) (CPU/GPU) RMA 2.757 3.128 0.336/— ISTA 0.363 0.387 13.561/— RMIST-Net 0.087 0.062 1.522/ 0.026 LSISTA 0.299 0.289 7.054/0.033
下载: 导出CSV
表 5 Image entropy of different algorithms with different SNRs in simulated 3D SAR imaging
Algorithms 10 dB 0 dB Time (s) (CPU/GPU) RMA 2.789 3.155 0.337/— ISTA 0.548 0.884 14.523/— RMIST-Net 0.377 0.632 1.630/ 0.030 LSISTA 0.379 0.419 6.931/0.036
下载: 导出CSV
表 6 Image entropy of different algorithms in the experiment of Fig. 9
Algorithms 50% 30% Time (CPU/GPU) RMA 4.530 4.761 0.176/— ISTA 1.125 0.948 6.604/— RMIST-Net 0.749 0.584 0.156/ 0.010 LSISTA 0.586 0.429 3.461/0.013
下载: 导出CSV
表 7 Image entropy of different algorithms in the experiment of Fig. 10
Algorithms 50% 30% Time (CPU/GPU) RMA 6.141 5.960 0.135/— ISTA 3.567 3.058 6.086/— RMIST-Net 2.719 2.159 0.115/ 0.009 LSISTA 2.376 1.845 3.103/0.013
下载: 导出CSV
表 8 Computational complexity of different algorithms
Algorithms FLOPs RMA ${N_y}{N_s}\left( {10{{\log }_2}{N_s} + 12} \right)$ ISTA $ {N_{{\mathrm{iter}}}}{N_y}{N_s}\left( {10{{\log }_2}{N_s} + 12} \right) $ RMIST-Net $ T{N_y}{N_s}\left( {10{{\log }_2}{N_s} + 12} \right) $ LSISTA $ T{N_s}\left( {{N_y}\left( {10{{\log }_2}{N_s} + 12} \right) + 2846} \right) $
下载: 导出CSV
表 9 MAEs in cases of the different number of target points
Target points ISTA RMIST-Net LSISTA 99422 (37.9%)0.125 0.121 0.094 24896 (9.5%)0.027 0.026 0.022 6203 (2.4%)0.005 0.005 0.003
下载: 导出CSV
-
[1] 杨建宇. 雷达对地成像技术多向演化趋势与规律分析[J]. 雷达学报, 2019, 8(6): 669–692. doi: 10.12000/JR19099.YANG Jianyu. Multi-directional evolution trend and law analysis of radar ground imaging technology[J]. Journal of Radars, 2019, 8(6): 669–692. doi: 10.12000/JR19099. [2] 吴一戎, 朱敏慧. 合成孔径雷达技术的发展现状与趋势[J]. 遥感技术与应用, 2000, 15(2): 121–123. doi: 10.3969/j.issn.1004-0323.2000.02.012.WU Yirong and ZHU Minhui. The developing status and trends of synthetic aperture radar[J]. Remote Sensing Technology and Application, 2000, 15(2): 121–123. doi: 10.3969/j.issn.1004-0323.2000.02.012. [3] CURLANDER J C and MCDONOUGH R N. Synthetic Aperture Radar[M]. New York: Wiley, 1991. [4] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306. doi: 10.1109/TIT.2006.871582. [5] SHI Wuzhen, JIANG Feng, LIU Shaohui, et al. Image compressed sensing using convolutional neural network[J]. IEEE Transactions on Image Processing, 2019, 29: 375–388. doi: 10.1109/TIP.2019.2928136. [6] YANG Xianjun, TAO Xiaofeng, DUTKIEWICZ E, et al. Energy-efficient distributed data storage for wireless sensor networks based on compressed sensing and network coding[J]. IEEE Transactions on Wireless Communications, 2013, 12(10): 5087–5099. doi: 10.1109/TWC.2013.090313.121804. [7] POTTER L C, ERTIN E, PARKER J T, et al. Sparsity and compressed sensing in radar imaging[J]. Proceedings of the IEEE, 2010, 98(6): 1006–1020. doi: 10.1109/JPROC.2009.2037526. [8] CAMLICA S, GURBUZ A C, and ARIKAN O. Autofocused spotlight SAR image reconstruction of off-grid sparse scenes[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1880–1892. doi: 10.1109/TAES.2017.2675138. [9] PU Wei and WU Junjie. OSRanP: A novel way for radar imaging utilizing joint sparsity and low-rankness[J]. IEEE Transactions on Computational Imaging, 2020, 6: 868–882. doi: 10.1109/TCI.2020.2993170. [10] DONOHO D L, MALEKI A, and MONTANARI A. Message-passing algorithms for compressed sensing[J]. Proceedings of the National Academy of Sciences of the United States of America, 2009, 106(45): 18914–18919. doi: 10.1073/pnas.0909892106. [11] BOYD S, PARIKH N, CHU E, et al. Distributed optimization and statistical learning via the alternating direction method of multipliers[J]. Foundations and Trends® in Machine Learning, 2011, 3(1): 1–122. doi: 10.1561/2200000016. [12] BECK A and TEBOULLE M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems[J]. SIAM Journal on Imaging Sciences, 2009, 2(1): 183–202. doi: 10.1137/080716542. [13] ZHAO Lifan, WANG Lu, YANG Lei, et al. The race to improve radar imagery: An overview of recent progress in statistical sparsity-based techniques[J]. IEEE Signal Processing Magazine, 2016, 33(6): 85–102. doi: 10.1109/MSP.2016.2573847. [14] FANG Jian, XU Zongben, ZHANG Bingchen, et al. Fast compressed sensing SAR imaging based on approximated observation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(1): 352–363. doi: 10.1109/JSTARS.2013.2263309. [15] JIANG Chenglong, ZHANG Bingchen, FANG Jian, et al. Efficient ℓq regularisation algorithm with range–azimuth decoupled for SAR imaging[J]. Electronics Letters, 2014, 50(3): 204–205. doi: 10.1049/el.2013.1989. [16] GREGOR K and LECUN Y. Learning fast approximations of sparse coding[C]. The 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 2010: 399–406. [17] PU Wei. SAE-Net: A deep neural network for SAR autofocus[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5220714. doi: 10.1109/TGRS.2021.3139914. [18] WANG Mou, WEI Shunjun, SHI Jun, et al. CSR-Net: A novel complex-valued network for fast and precise 3-D microwave sparse reconstruction[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 4476–4492. doi: 10.1109/JSTARS.2020.3014696. [19] HU Xiaowei, XU Feng, GUO Yiduo, et al. MDLI-Net: Model-driven learning imaging network for high-resolution microwave imaging with large rotating angle and sparse sampling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5212617. doi: 10.1109/TGRS.2021.3110579. [20] WEI Yangkai, LI Yinchuan, DING Zegang, et al. SAR parametric super-resolution image reconstruction methods based on ADMM and deep neural network[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(12): 10197–10212. doi: 10.1109/TGRS.2021.3052793. [21] WEI Shunjun, LIANG Jiadian, WANG Mou, et al. AF-AMPNet: A deep learning approach for sparse aperture ISAR imaging and autofocusing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5206514. doi: 10.1109/TGRS.2021.3073123. [22] WANG Mou, WEI Shunjun, ZHOU Zichen, et al. Efficient ADMM framework based on functional measurement model for mmW 3-D SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5226417. doi: 10.1109/TGRS.2022.3165541. [23] WANG Mou, WEI Shunjun, LIANG Jiadian, et al. TPSSI-Net: Fast and enhanced two-path iterative network for 3D SAR sparse imaging[J]. IEEE Transactions on Image Processing, 2021, 30: 7317–7332. doi: 10.1109/TIP.2021.3104168. [24] PU Wei. Deep SAR imaging and motion compensation[J]. IEEE Transactions on Image Processing, 2021, 30: 2232–2247. doi: 10.1109/TIP.2021.3051484. [25] WANG Mou, WEI Shunjun, LIANG Jiadian, et al. Lightweight FISTA-inspired sparse reconstruction network for mmW 3-D holography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5211620. doi: 10.1109/TGRS.2021.3093307. [26] WANG Mou, WEI Shunjun, LIANG Jiadian, et al. RMIST-Net: Joint range migration and sparse reconstruction network for 3-D mmW imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5205117. doi: 10.1109/TGRS.2021.3068405. [27] ZHANG Jian and GHANEM B. ISTA-Net: Interpretable optimization-inspired deep network for image compressive sensing[C]. The 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 1828–1837. [28] ZHOU Yulong, ZHONG Yu, WEI Zhun, et al. An improved deep learning scheme for solving 2-D and 3-D inverse scattering problems[J]. IEEE Transactions on Antennas and Propagation, 2021, 69(5): 2853–2863. doi: 10.1109/TAP.2020.3027898. [29] LOPEZ-SANCHEZ J M and FORTUNY-GUASCH J. 3-D radar imaging using range migration techniques[J]. IEEE Transactions on Antennas and Propagation, 2000, 48(5): 728–737. doi: 10.1109/8.855491. -














计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

