
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Multi-rank Range-spread Target Detection Method for Space/Time Symmetric Array Radar under Non-Gaussian Clutter Background
-
摘要: 针对多通道阵列雷达从实际杂波中检测目标场景,该文提出了一种面向多通道阵列雷达非高斯杂波背景的多秩距离扩展目标检测方法。首先,利用秩大于1的子空间矩阵和相应距离单元的坐标向量,建立了多秩距离扩展目标模型;然后,利用雷达接收单元空间或时间中心对称探测场景下杂波协方差矩阵的反对称结构信息,通过酉变换,采取广义似然比、Rao、Wald检验准则,构建待解参数小样本估计策略,设计了面向非高斯杂波背景的多秩距离扩展目标检测方法。最后,通过理论推导证明了所提检测方法相对于杂波协方差矩阵具有恒虚警特性。基于仿真数据和实测数据的实验结果表明,所提检测方法能够保证对杂波协方差矩阵具有恒虚警特性,此外,相较于现有检测方法,所提检测方法提升了小训练支持的目标检测性能,并且在导向矢量失配条件下,有效地改善目标检测的稳健性。Abstract: This study proposes a multi-rank range-spread target detection method for multi-channel array radar under a non-Gaussian clutter background. The method aims to detect the target from real clutter using the multi-channel array radar. First, a multi-rank range-spread target model was formulated using a subspace matrix with a rank greater than one and the coordinate vectors of corresponding range bins. Then, by exploiting the persymmetric structure information of the clutter covariance matrix under the detection scenario, wherein the radar receiver units were central symmetric in space or time, a small sample estimation strategy for the parameters to be solved through the unitary transformation was constructed. Further, a non-Gaussian clutter background multi-rank range-spread target detection method was designed based on the generalized likelihood ratio, Rao, and Wald tests. Finally, a theoretical derivation proved that the proposed detection method has the constant false alarm rate property. The experimental results based on both the simulated and measured data showed that the proposed detection method can ensure the constant false alarm rate property of the clutter covariance matrix. Additionally, compared with the existing detection methods, the proposed detection method improves the target detection performance under small sample support. Besides, the proposed detection method effectively improves the robustness of target detection under the condition of steering vector mismatch.
-
Key words:
- Adaptive detection /
- Range-spread target /
- Multi-rank subspace /
- Persymmetry /
- Non-Gaussian
-
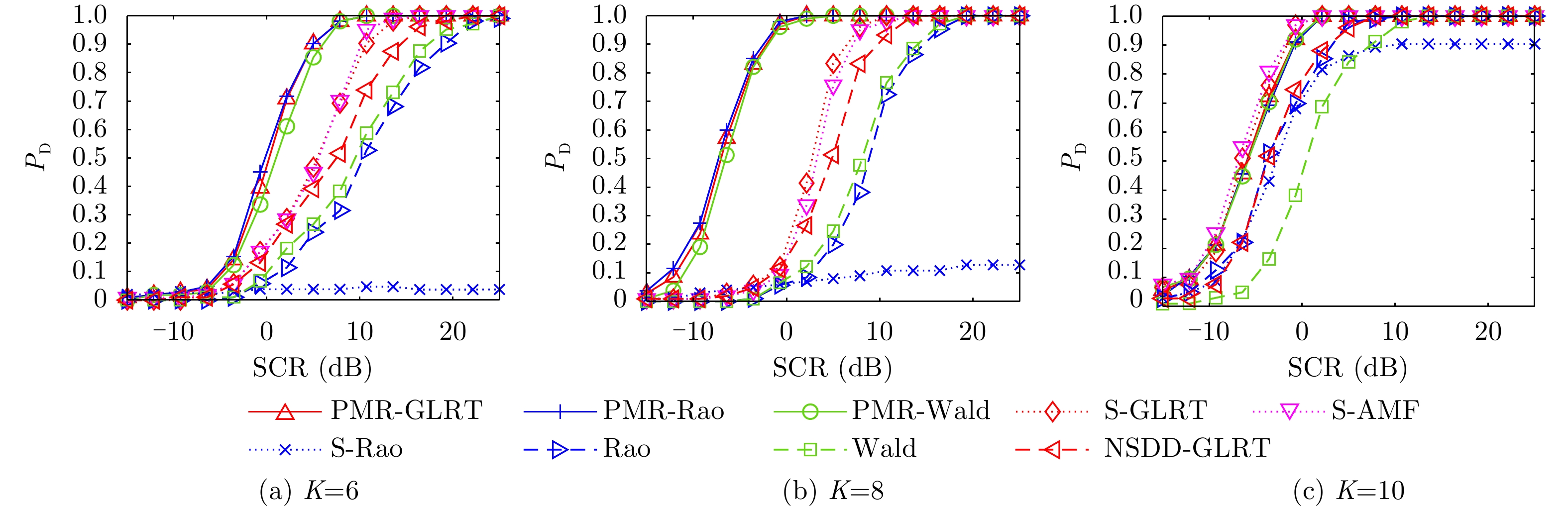
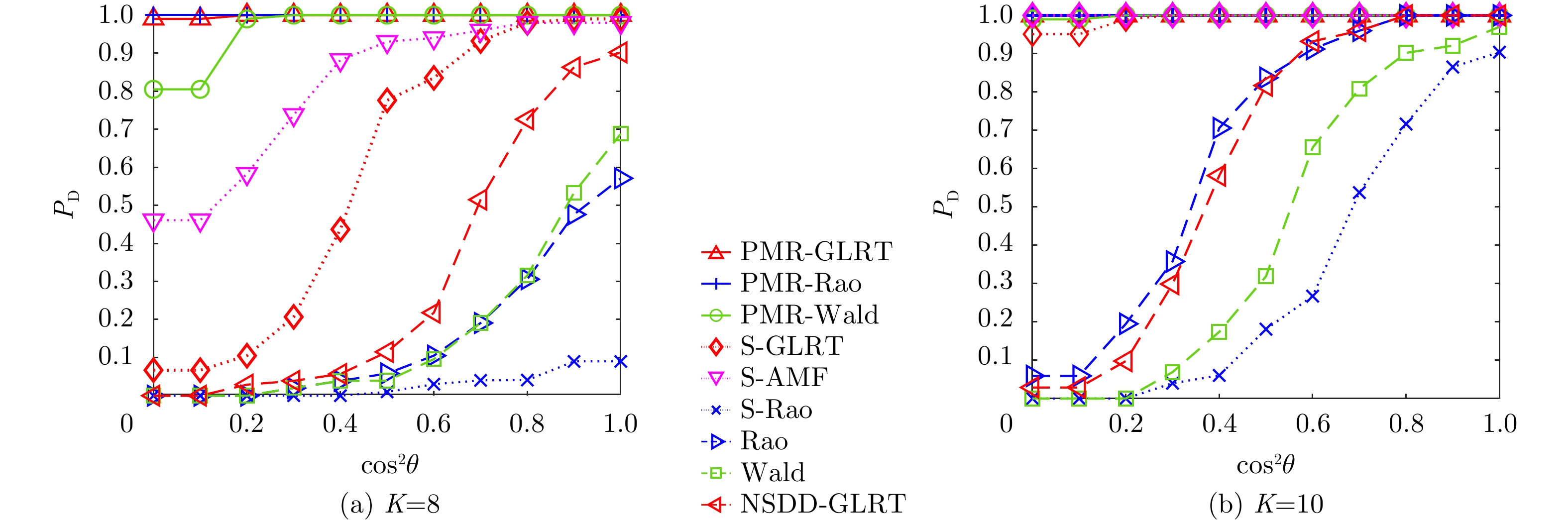
图 3 不同失配程度下基于仿真数据的检测概率曲线
Figure 3. Detection probability curves of the detectors for different mismatch levels based on the simulated data
-
[1] 韩金旺, 张子敬, 刘军, 等. 基于贝叶斯的高斯杂波背景下MIMO雷达自适应检测算法[J]. 雷达学报, 2019, 8(4): 501–509. doi: 10.12000/JR18090HAN Jinwang, ZHANG Zijing, LIU Jun, et al. Adaptive Bayesian detection for MIMO radar in Gaussian clutter[J]. Journal of Radars, 2019, 8(4): 501–509. doi: 10.12000/JR18090 [2] 王永良, 刘维建, 谢文冲, 等. 机载雷达空时自适应检测方法研究进展[J]. 雷达学报, 2014, 3(2): 201–207. doi: 10.3724/SP.J.1300.2014.13081WANG Yongliang, LIU Weijian, XIE Wenchong, et al. Research progress of space-time adaptive detection for airborne radar[J]. Journal of Radars, 2014, 3(2): 201–207. doi: 10.3724/SP.J.1300.2014.13081 [3] DE MAIO A. Rao test for adaptive detection in Gaussian interference with unknown covariance matrix[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3577–3584. doi: 10.1109/TSP.2007.894238 [4] PASCAL F, CHITOUR Y, OVARLEZ J P, et al. Covariance structure maximum-likelihood estimates in compound Gaussian noise: Existence and algorithm analysis[J]. IEEE Transactions on Signal Processing, 2008, 56(1): 34–48. doi: 10.1109/TSP.2007.901652 [5] 许述文, 石星宇, 水鹏朗. 复合高斯杂波下抑制失配信号的自适应检测器[J]. 雷达学报, 2019, 8(3): 326–334. doi: 10.12000/JR19030XU Shuwen, SHI Xingyu, and SHUI Penglang. An adaptive detector with mismatched signals rejection in compound Gaussian clutter[J]. Journal of Radars, 2019, 8(3): 326–334. doi: 10.12000/JR19030 [6] GRECO M, GINI F, and RANGASWAMY M. Statistical analysis of measured polarimetric clutter data at different range resolutions[J]. IEE Proceedings - Radar, Sonar and Navigation, 2006, 153(6): 473–481. doi: 10.1049/ip-rsn:20060045 [7] SANGSTON K J, GINI F, and GRECO M S. Coherent radar target detection in heavy-tailed compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 64–77. doi: 10.1109/TAES.2012.6129621 [8] HE You, JIAN Tao, SU Feng, et al. Adaptive detection application of covariance matrix estimator for correlated non-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 2108–2117. doi: 10.1109/TAES.2010.5595620 [9] CONTE E, LOPS M, and RICCI G. Asymptotically optimum radar detection in compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1995, 31(2): 617–625. doi: 10.1109/7.381910 [10] STINCO P, GRECO M, and GINI F. Adaptive detection in compound-Gaussian clutter with inverse-gamma texture[C]. 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011. [11] LI Na, CUI Guolong, KONG Lingjiang, et al. Rao and Wald tests design of multiple-input multiple-output radar in compound-Gaussian clutter[J]. IET Radar, Sonar & Navigation, 2012, 6(8): 729–738. doi: 10.1049/iet-rsn.2011.0376 [12] LIU Weijian, LIU Jun, HUANG Lei, et al. Performance analysis of reduced-dimension subspace signal filtering and detection in sample-starved environment[J]. Journal of the Franklin Institute, 2019, 356(1): 629–653. doi: 10.1016/j.jfranklin.2018.10.017 [13] YAN Linjie, HAO Chengpeng, ORLANDO D, et al. Parametric space-time detection and range estimation of point-like targets in partially homogeneous environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 1228–1242. doi: 10.1109/TAES.2019.2928672 [14] 顾新锋, 简涛, 何友, 等. 局部均匀背景中距离扩展目标的GLRT检测器及性能分析[J]. 电子学报, 2013, 41(12): 2367–2373. doi: 10.3969/j.issn.0372-2112.2013.12.008GU Xinfeng, JIAN Tao, HE You, et al. GLRT detector of range-spread target in local homogeneous background and its performance analysis[J]. Acta Electronica Sinica, 2013, 41(12): 2367–2373. doi: 10.3969/j.issn.0372-2112.2013.12.008 [15] 何友, 简涛, 苏峰, 等. 非高斯杂波协方差矩阵估计方法及CFAR特性分析[J]. 中国科学:信息科学, 2011, 41(1): 90–99.HE You, JIAN Tao, SU Feng, et al. CFAR assessment of covariance matrix estimators for non-Gaussian clutter[J]. Science in China:Information Sciences, 2011, 41(1): 90–99. [16] GAO Yongchan, LI Hongbin, and HIMED B. Adaptive subspace tests for multichannel signal detection in auto-regressive disturbance[J]. IEEE Transactions on Signal Processing, 2018, 66(21): 5577–5587. doi: 10.1109/TSP.2018.2869123 [17] XU D, ADDABBO P, HAO C, et al. Adaptive strategies for clutter edge detection in radar[J]. Signal Processing, 2021, 186: 108127. doi: 10.1016/j.sigpro.2021.108127 [18] CAROTENUTO V, DE MAIO A, ORLANDO D, et al. Adaptive radar detection using two sets of training data[J]. IEEE Transactions on Signal Processing, 2018, 66(7): 1791–1801. doi: 10.1109/TSP.2017.2778684 [19] LIU Weijian, ZHANG Zhaojian, LIU Jun, et al. Detection of a rank-one signal with limited training data[J]. Signal Processing, 2021, 186: 108120. doi: 10.1016/j.sigpro.2021.108120 [20] CONTE E, DE MAIO A, and RICCI G. CFAR detection of distributed targets in non-Gaussian disturbance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(2): 612–621. doi: 10.1109/TAES.2002.1008990 [21] CONTE E and DE MAIO A. Distributed target detection in compound-Gaussian noise with Rao and Wald tests[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(2): 568–582. doi: 10.1109/TAES.2003.1207267 [22] 简涛, 何友, 苏峰, 等. 非高斯背景下基于动态阈值的距离扩展目标检测器[J]. 电子学报, 2011, 39(1): 59–63.JIAN Tao, HE You, SU Feng, et al. Range-Spread target detector with dynamic threshold for non-Gaussian clutter[J]. Acta Electronica Sinica, 2011, 39(1): 59–63. [23] HE You, JIAN Tao, SU Feng, et al. Novel range-spread target detectors in non-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1312–1328. doi: 10.1109/TAES.2010.5545191 [24] COLUCCIA A, FASCISTA A, and RICCI G. A novel approach to robust radar detection of range-spread targets[J]. Signal Processing, 2020, 166: 107223. doi: 10.1016/j.sigpro.2019.07.016 [25] XU Shuwen, XUE Jian, and SHUI Penglang. Adaptive detection of range-spread targets in compound Gaussian clutter with the square root of inverse Gaussian texture[J]. Digital Signal Processing, 2016, 56: 132–139. doi: 10.1016/j.dsp.2016.06.009 [26] XUE Jian, XU Shuwen, and SHUI Penglang. Near-optimum coherent CFAR detection of radar targets in compound-Gaussian clutter with inverse Gaussian texture[J]. Signal Processing, 2020, 166: 107236. doi: 10.1016/j.sigpro.2019.07.029 [27] LIU Weijian, LIU Jun, HAO Chengpeng, et al. Multichannel adaptive signal detection: Basic theory and literature review[J]. Science China Information Sciences, 2022, 65(2): 121301. doi: 10.1007/s11432-020-3211-8 [28] SHI Bo, HAO Chengpeng, HOU Chaohuan, et al. Parametric Rao test for multichannel adaptive detection of range-spread target in partially homogeneous environments[J]. Signal Processing, 2015, 108: 421–429. doi: 10.1016/j.sigpro.2014.10.007 [29] 刘维建, 王利才, 狄源水, 等. 自适应能量检测器及在失配信号检测中的应用[J]. 雷达学报, 2015, 4(2): 149–159. doi: 10.12000/JR14132LIU Weijian, WANG Licai, DI Yuanshui, et al. Adaptive energy detector and its application for mismatched signal detection[J]. Journal of Radars, 2015, 4(2): 149–159. doi: 10.12000/JR14132 [30] WANG Zhihang, HE Zishu, HE Qin, et al. Adaptive CFAR detectors for mismatched signal in compound Gaussian sea clutter with inverse Gaussian texture[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 19: 3502705. doi: 10.1109/LGRS.2020.3047390 [31] LIU Weijian, LIU Jun, GAO Yongchan, et al. Multichannel signal detection in interference and noise when signal mismatch happens[J]. Signal Processing, 2020, 166: 107268. doi: 10.1016/j.sigpro.2019.107268 [32] LIU Weijian, LIU Jun, LI Hai, et al. Multichannel signal detection based on Wald test in subspace interference and Gaussian noise[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(3): 1370–1381. doi: 10.1109/TAES.2018.2870445 [33] GAO Yongchan, JI Hongbing, and LIU Weijian. Persymmetric adaptive subspace detectors for range-spread targets[J]. Digital Signal Processing, 2019, 89: 116–123. doi: 10.1016/j.dsp.2019.03.007 [34] REED I S, MALLETT J D, and BRENNAN L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, AES-10(6): 853–863. doi: 10.1109/TAES.1974.307893 [35] NITZBERG R. Application of maximum likelihood estimation of persymmetric covariance matrices to adaptive processing[J]. IEEE Transactions on Aerospace and Electronic Systems, 1980, AES-16(1): 124–127. doi: 10.1109/TAES.1980.308887 [36] 丁昊, 薛永华, 黄勇, 等. 均匀和部分均匀杂波中子空间目标的斜对称自适应检测方法[J]. 雷达学报, 2015, 4(4): 418–430. doi: 10.12000/JR14133DING Hao, XUE Yonghua, HUANG Yong, et al. Persymmetric adaptive detectors of subspace signals in homogeneous and partially homogeneous clutter[J]. Journal of Radars, 2015, 4(4): 418–430. doi: 10.12000/JR14133 [37] LIU Jun, ORLANDO D, ADDABBO P, et al. SINR distribution for the persymmetric SMI beamformer with steering vector mismatches[J]. IEEE Transactions on Signal Processing, 2019, 67(5): 1382–1392. doi: 10.1109/TSP.2019.2892027 [38] 闫林杰, 郝程鹏, 殷超然, 等. 部分均匀环境下适用于空间对称线阵的修正广义似然比检测方法[J]. 雷达学报, 2021, 10(3): 443–452. doi: 10.12000/JR20140YAN Linjie, HAO Chengpeng, YIN Chaoran, et al. Modified generalized likelihood ratio test detection based on a symmetrically spaced linear array in partially homogeneous environments[J]. Journal of Radars, 2021, 10(3): 443–452. doi: 10.12000/JR20140 [39] LIU Jun, LIU Weijian, CHEN Bo, et al. Modified Rao test for multichannel adaptive signal detection[J]. IEEE Transactions on Signal Processing, 2016, 64(3): 714–725. doi: 10.1109/TSP.2015.2491892 [40] GERLACH K. Spatially distributed target detection in non-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 926–934. doi: 10.1109/7.784062 -

 下载:
下载:


图(6)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

