
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Joint Transmit Resources and Trajectory Planning for Target Tracking in Airborne Radar Networks
-
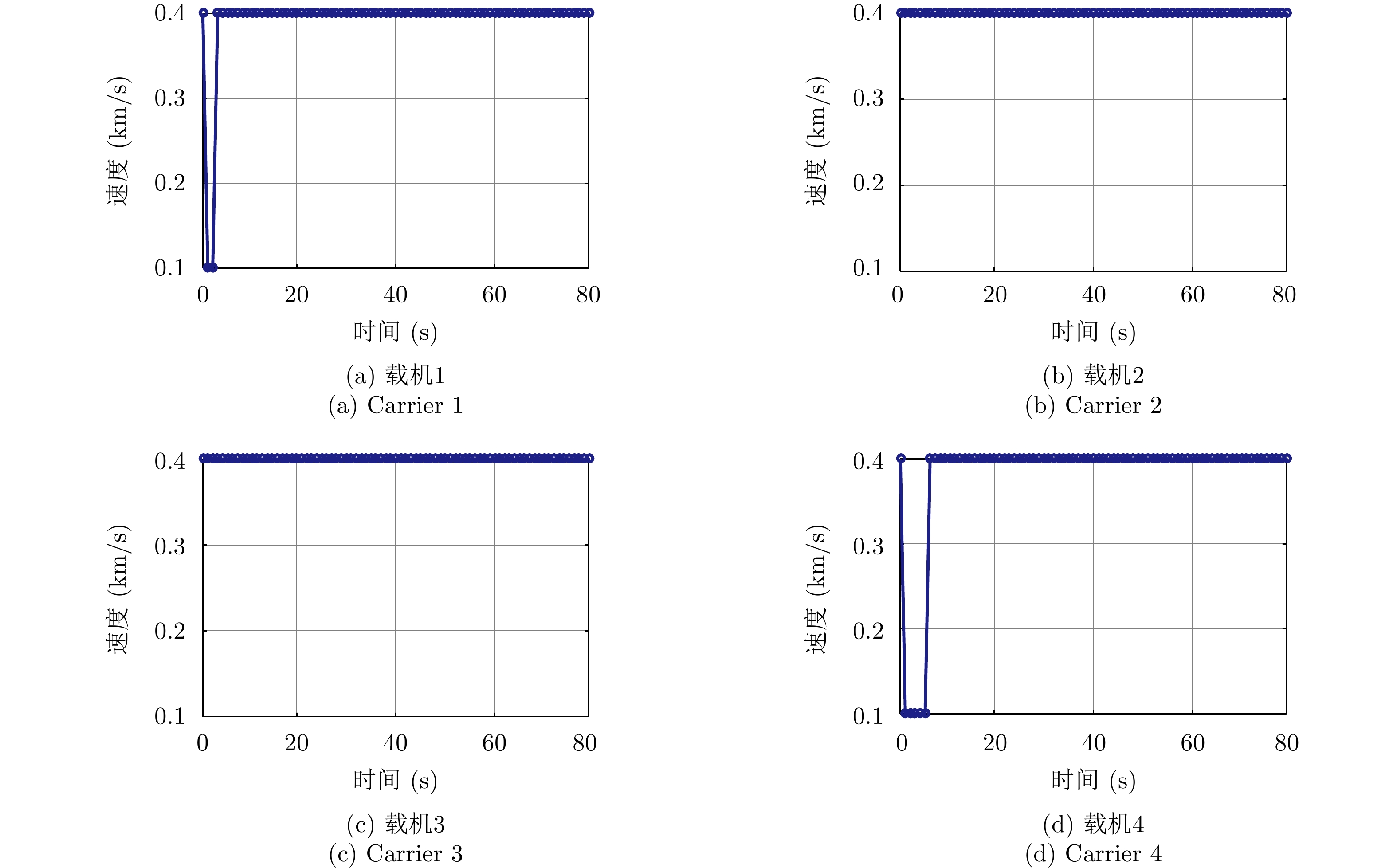
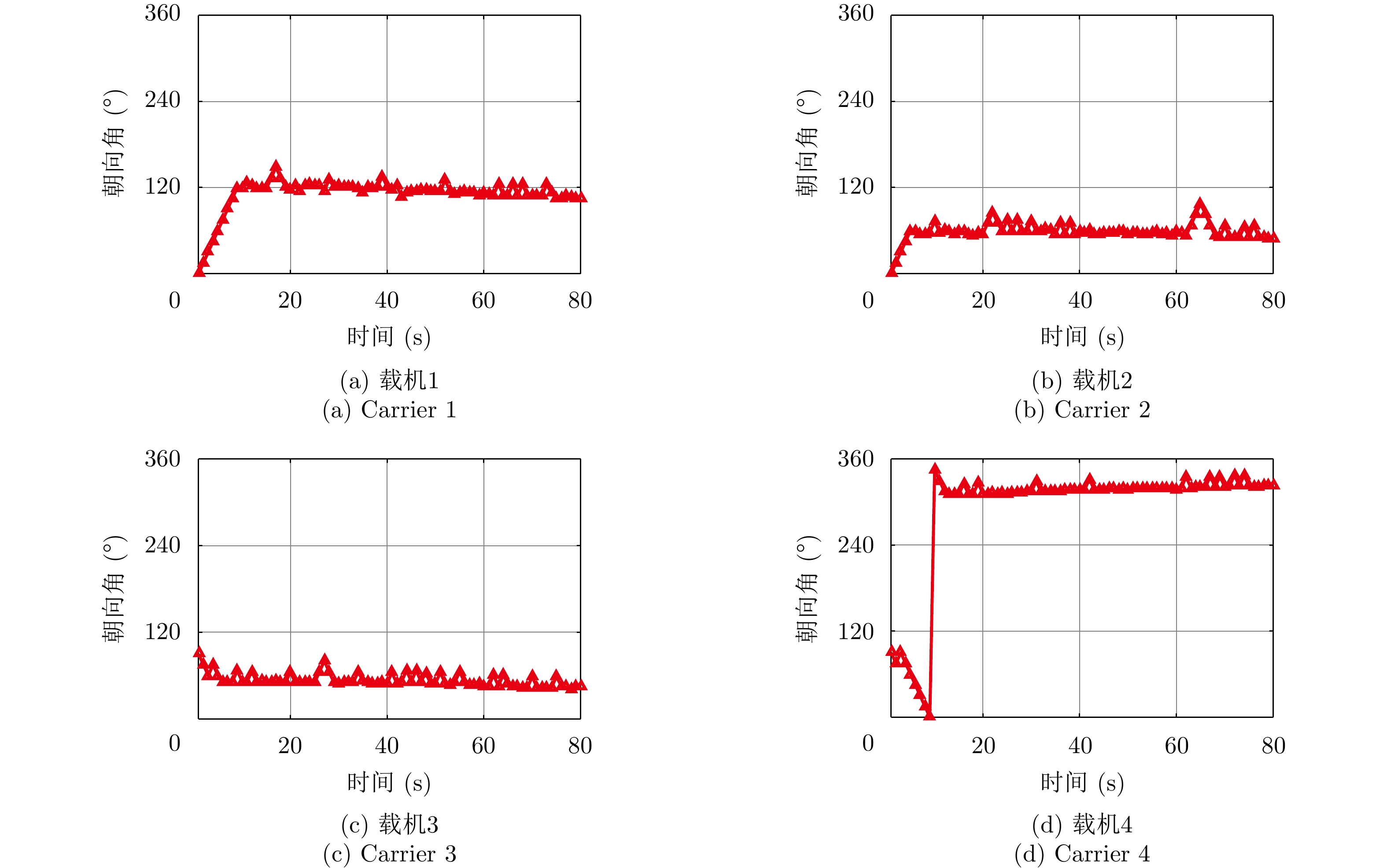
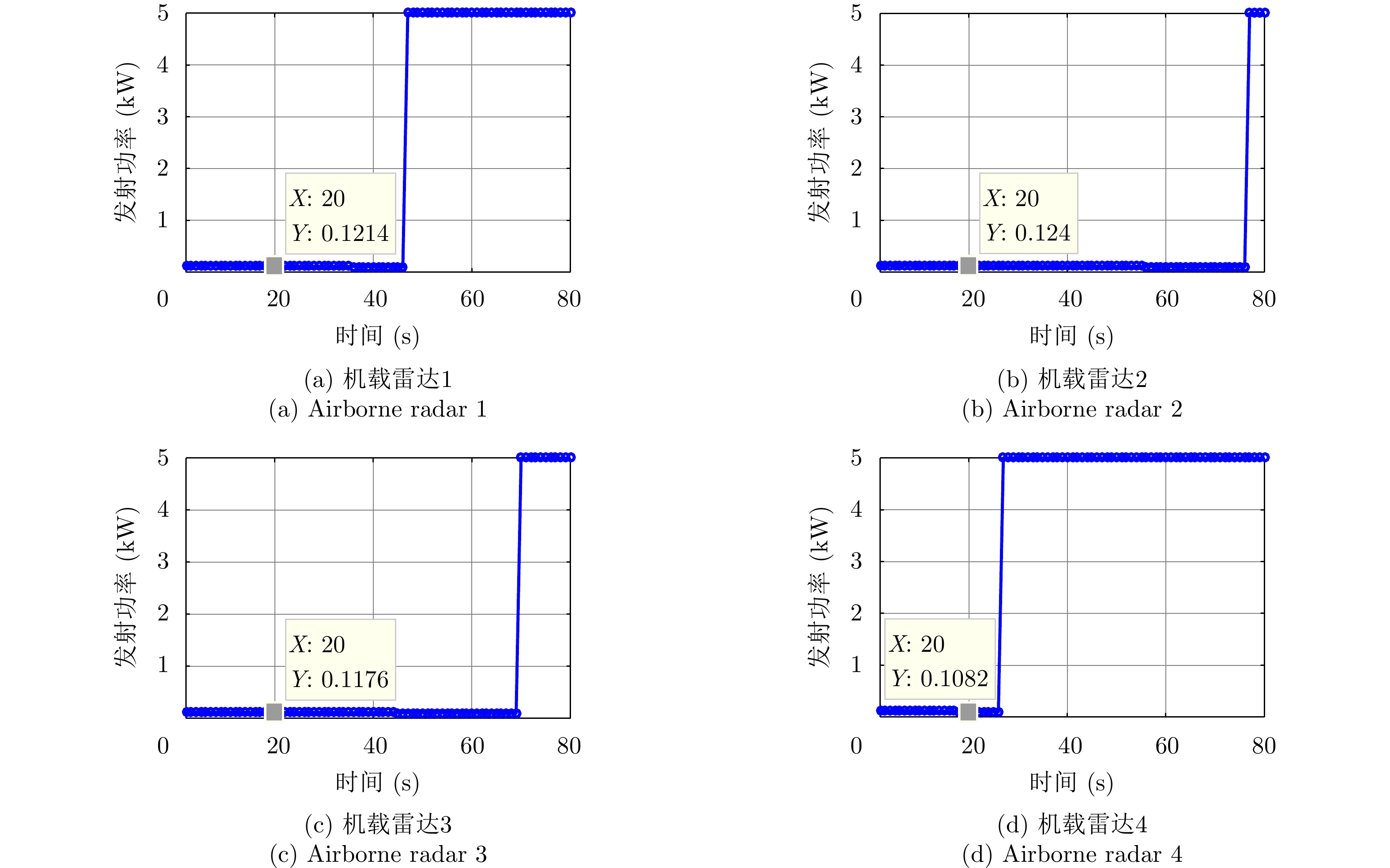
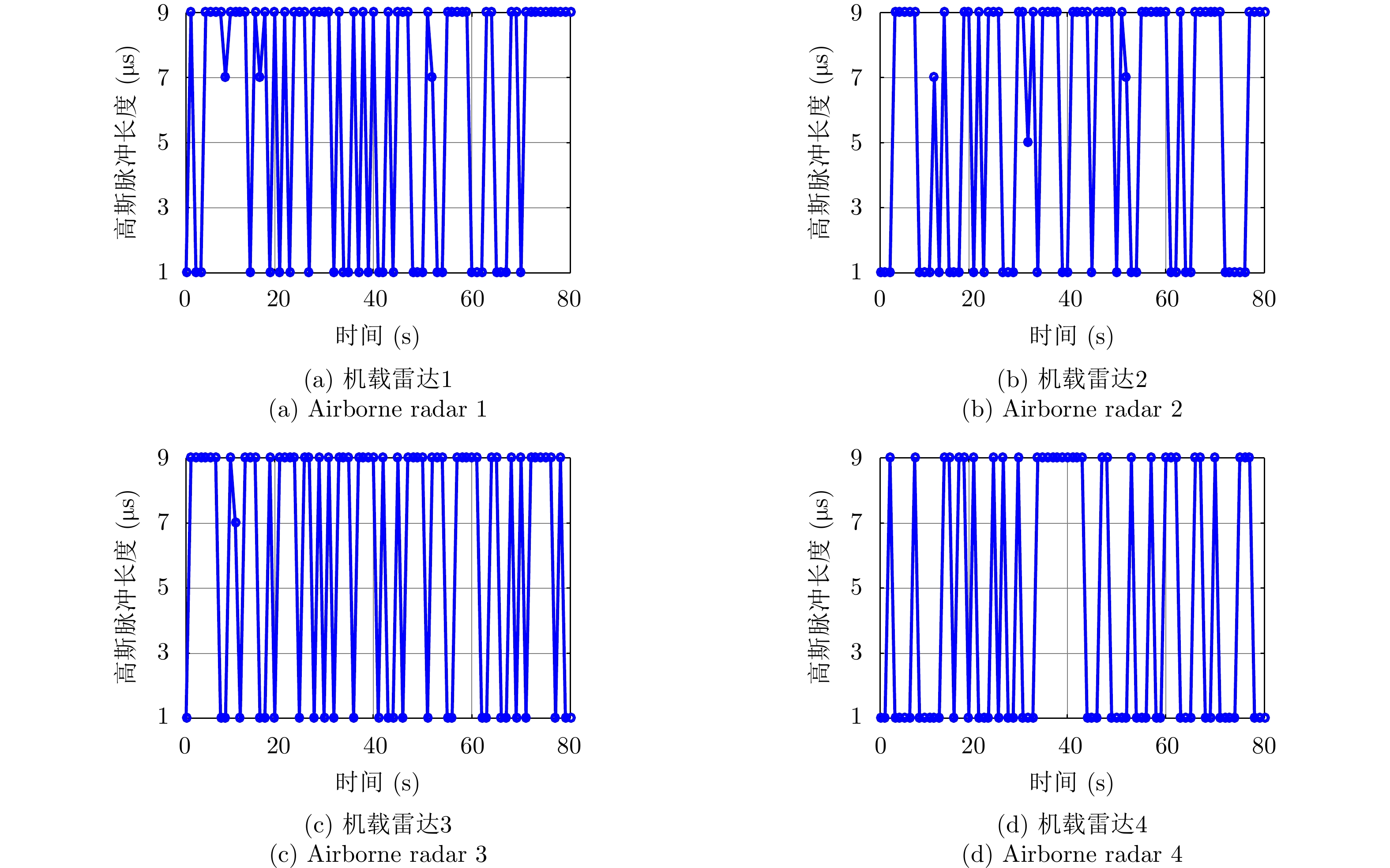
摘要: 该文针对机载组网雷达,在单目标跟踪场景下,研究了雷达辐射参数与航迹规划联合优化问题。首先,推导了包含各雷达辐射功率、驻留时间、发射信号高斯脉冲长度和信号带宽等射频辐射参数以及各载机速度、朝向角等平台运动参数的贝叶斯克拉默-拉奥下界(BCRLB)表达式,以此作为表征目标跟踪精度的衡量指标;推导了含有各雷达辐射功率、驻留时间等射频辐射参数以及各载机速度、朝向角等平台运动参数的机载组网雷达被截获概率,以此作为表征机载组网雷达射频隐身性能的衡量指标。在此基础上,建立了面向目标跟踪的机载组网雷达辐射参数与航迹规划联合优化模型,以最小化机载组网雷达的目标估计误差BCRLB为优化目标,以满足给定的系统射频资源、载机机动能力和预先设定的被截获概率阈值为约束条件,对各载机飞行速度、朝向角以及各机载雷达辐射功率、驻留时间、发射信号高斯脉冲长度和信号带宽进行联合优化设计,以提升机载组网雷达的目标跟踪精度。最后,针对上述优化问题,结合粒子群算法,采用5步分解迭代算法进行求解。仿真结果表明,与现有算法相比,所提算法能够在满足一定射频隐身性能要求的条件下,有效提升机载组网雷达的目标跟踪精度。Abstract: This paper investigates the joint optimization problem of transmit resources and trajectory planning for target tracking in airborne radar networks. First, the analytical expression for the Bayesian Cramér-Rao Lower Bound (BCRLB) with the variables of the radar transmit power, dwell time, transmit signal Gaussian pulse length and signal bandwidth, and speed and heading angle of airborne nodes is derived and adopted as the metric function to evaluate the target tracking accuracy. In addition, the analytical expression of intercept probability with the variables of the radar transmit power, dwell time, and speed and heading angle of airborne nodes is also derived and utilized as the metric function to gauge the radio frequency stealth performance of the overall system. On this basis, a joint optimization model of transmit resources and trajectory planning for target tracking in airborne radar networks is established to jointly optimize the radar transmit power, dwell time, transmit signal Gaussian pulse length and signal bandwidth, and speed and heading angle of airborne nodes. This is done to minimize the target estimation error BCRLB under the constraints of given system resources, aircraft maneuvering and intercept probability threshold, thereby improving the target tracking accuracy of airborne radar network. Subsequently, a five-step decomposition iterative algorithm incorporating the particle swarm algorithm is used to solve the underlying optimization problem. The simulation results demonstrate that the target tracking accuracy of the proposed algorithm outperforms other existing approaches.
-
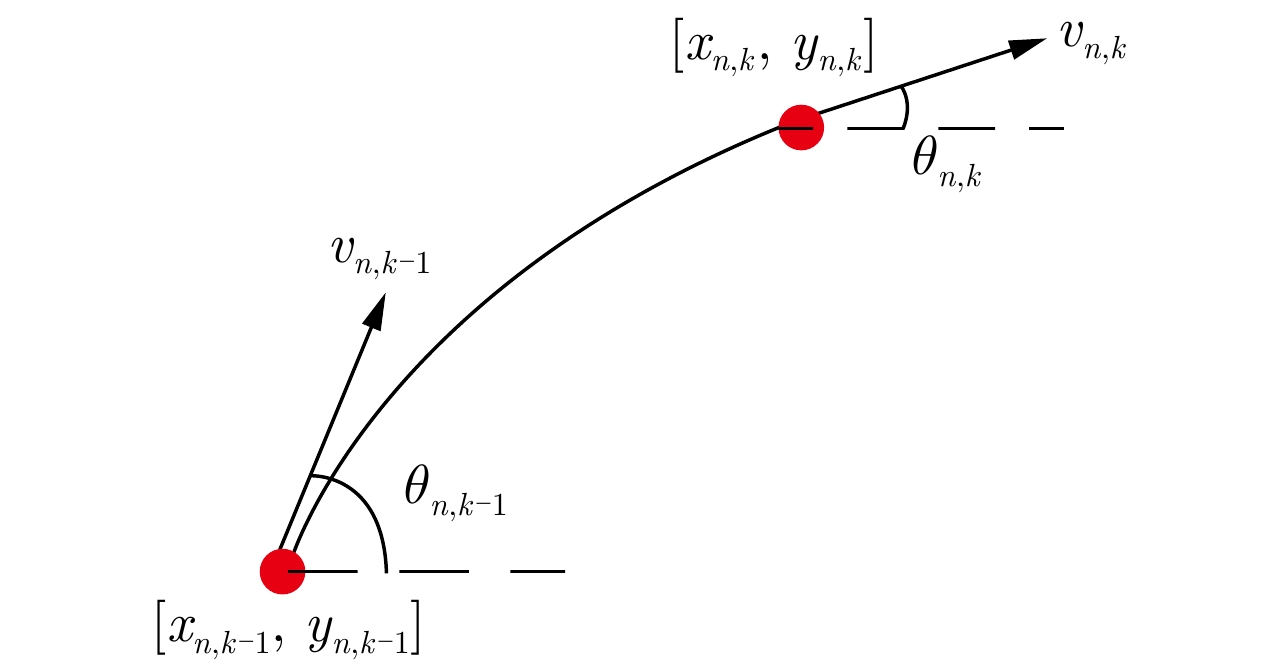
图 1 载机运动模型示意图
Figure 1. Schematic diagram of the movement model of the carrier aircraft
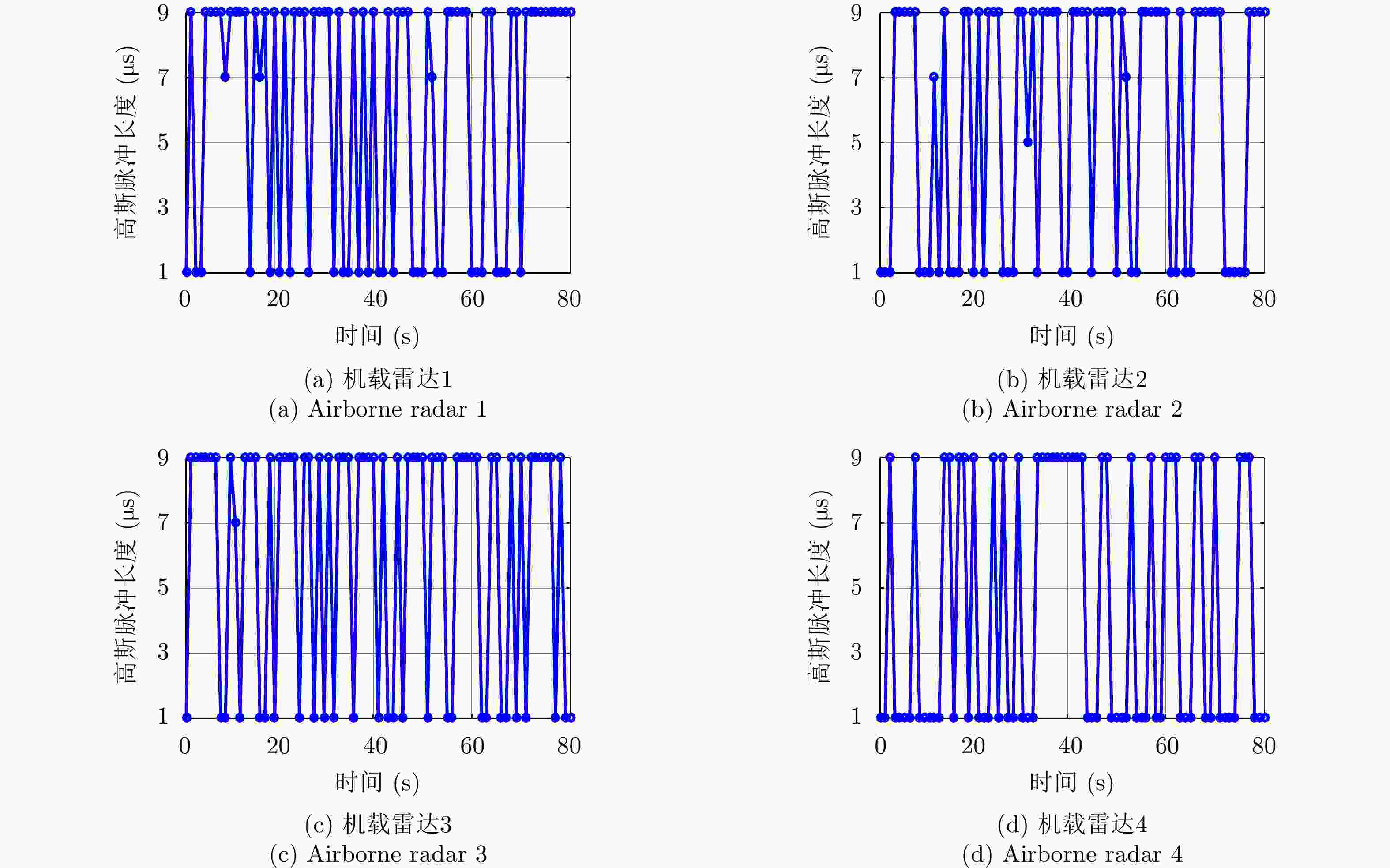
图 7 发射信号高斯脉冲长度优化结果
Figure 7. Transmit signal Gaussian pulse length optimization results
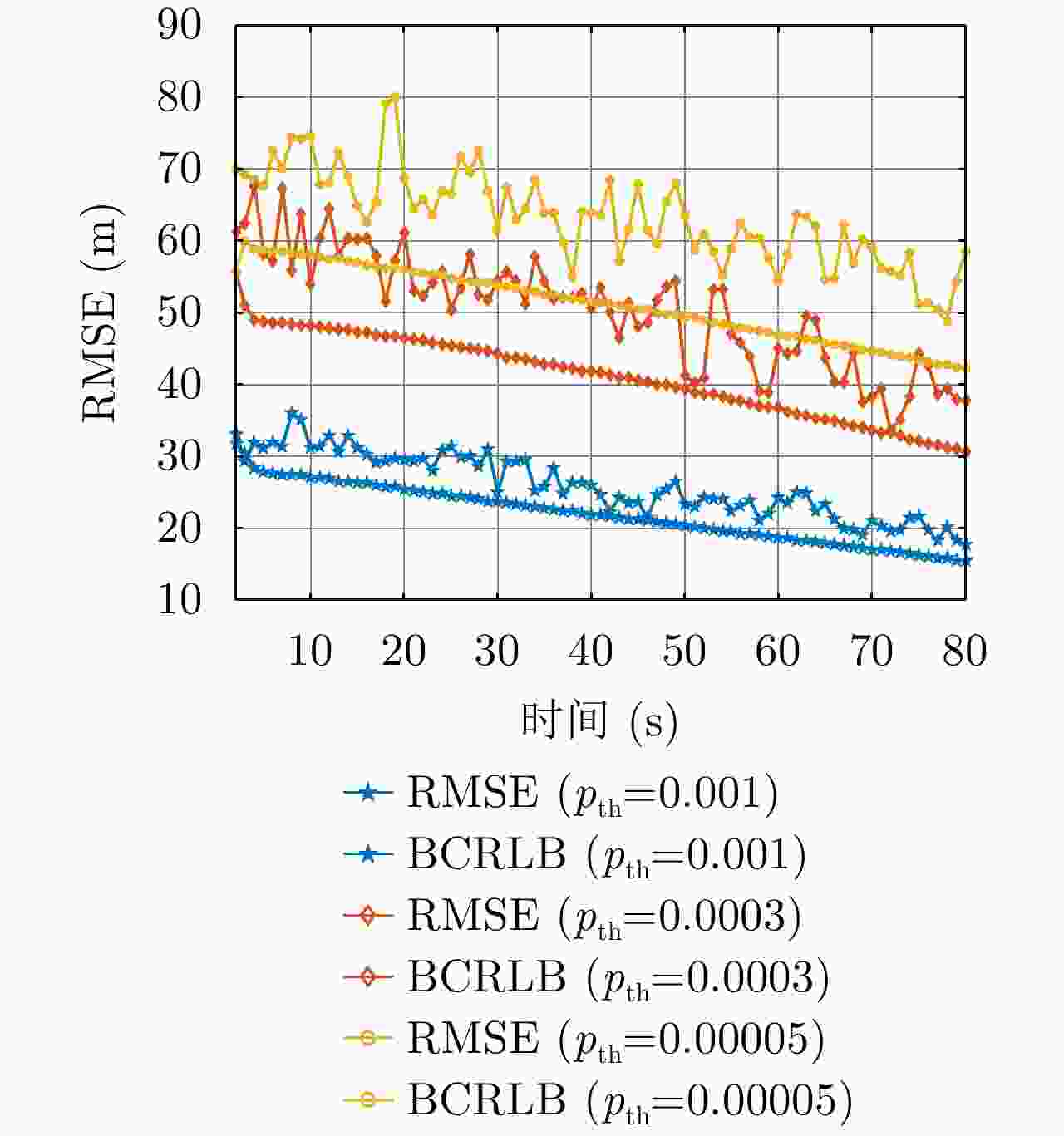
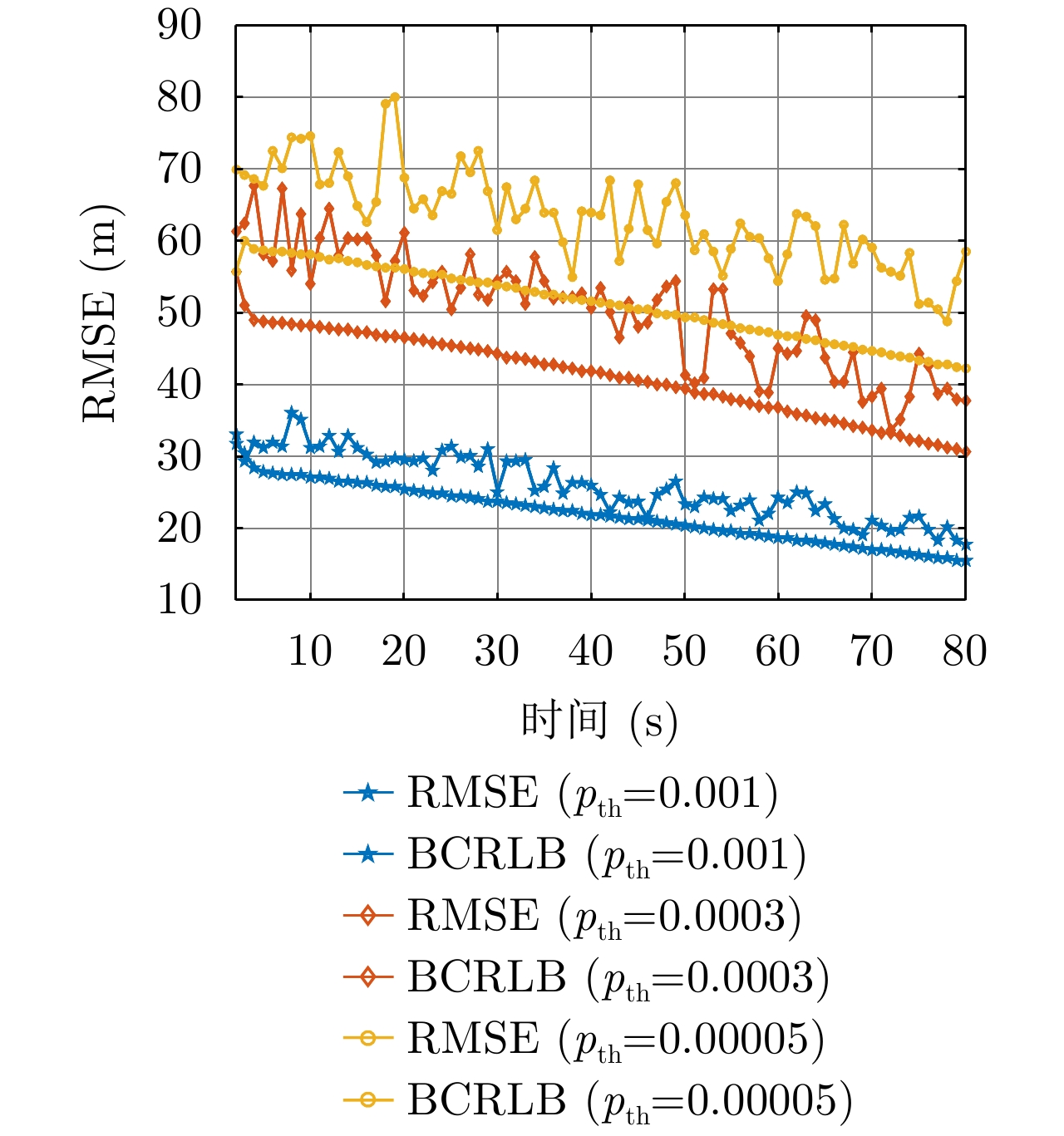
图 10 不同被截获概率阈值的RMSE对比结果
Figure 10. Comparison results of RMSE with different intercept probability thresholds
表 1 粒子群算法求解模型(23)
Table 1. Particle swarm algorithm to solve the model (23)
步骤1:初始化$ Q $个粒子的初始位置和速度,初始位置代表各载
机飞行速度和朝向角;定义权重系数$ \zeta $,常数$ {c_1} $和$ {c_2} $,最
大迭代次数$ {L_{\max }} $;步骤2:根据机载组网雷达辐射参数与各载机飞行参数之间的关
系,在满足约束条件${p_{n,k} } \le {p_{ {\text{th} } } },\forall n$情况下,计算每个粒
子当前位置下的最优雷达辐射参数;
步骤3:根据优化目标$\mathbb{F}\left( {{\boldsymbol{X}}_{\left. k \right|k - 1}^{ {\text{tgt} } }{{,} }{{\boldsymbol{P}}_{ {\text{t} },k} }{{,} }{{\boldsymbol{T}}_{ {\text{d} },k} } } \right){\text{ } }$计算粒子适应度;步骤4:更新全局最优粒子和个体最优粒子:
步骤5:根据式(28)更新粒子的速度与位置;步骤6:检验结束条件,若结果收敛或达到最大迭代次数,则迭
代结束,输出全局最优粒子;否则令$ l = l + 1 $,转入步
骤2,继续迭代循环。 下载: 导出CSV
下载: 导出CSV
表 2 机载组网雷达参数设置
Table 2. Parameter setting of airborne radar network
参数 数值 参数 数值 $ {G_{\text{t}}} $ $36\;{\text{dB} }$ $ {B_{\text{r}}} $ $1\;{\text{MHz} }$ $ {G_{\text{r}}} $ $35\;{\text{dB} }$ $ {F_{\text{r}}} $ $ 3\;{\text{dB}} $ $ {G_{{\text{RP}}}} $ $ 45 $ $ {f_{\text{c}}} $ $ 12\;{\text{GHz}} $ ${\bar P _{\min } }$ $ 0 $ $ {\bar P _{\max }} $ $ 5\;{\text{kW}} $ ${\bar \theta _{\max } }$ $ {15^ \circ } $ $ k $ $ 1.38 \times {10^{ - 23}}{{\text{J}} \mathord{\left/ {\vphantom {{\text{J}} {\text{K}}}} \right. } {\text{K}}} $ ${\bar v _{\min } }$ $0.1\;{ { {\text{km} } } / {\text{s} } }$ $ {\bar v _{\max }} $ $0.4\;{ { {\text{km} } } / {\text{s} } }$ $ {T_{\text{r}}} $ $5 \times {10^{ - 4} }\;{\text{s} }$ $ {\bar T _{\max }} $ $2.5 \times {10^{ - 2} }\;{\text{s} }$
下载: 导出CSV
表 3 截获接收机参数设置
Table 3. Parameter setting of intercept receiver
参数 数值 参数 数值 $p'_{{\rm{fa} } }$ $ {10^{ - 8}} $ $ {G_{{\text{IP}}}} $ $ 2 $ $ {F_{\text{I}}} $ $6\;{\text{dB} }$ $ {T_{\text{I}}} $ $2\;{\text{s} }$ $ {G_{\text{I}}} $ $10\;{\text{dB} }$ $ {B_{\text{I}}} $ $40\;{\text{GHz} }$
下载: 导出CSV
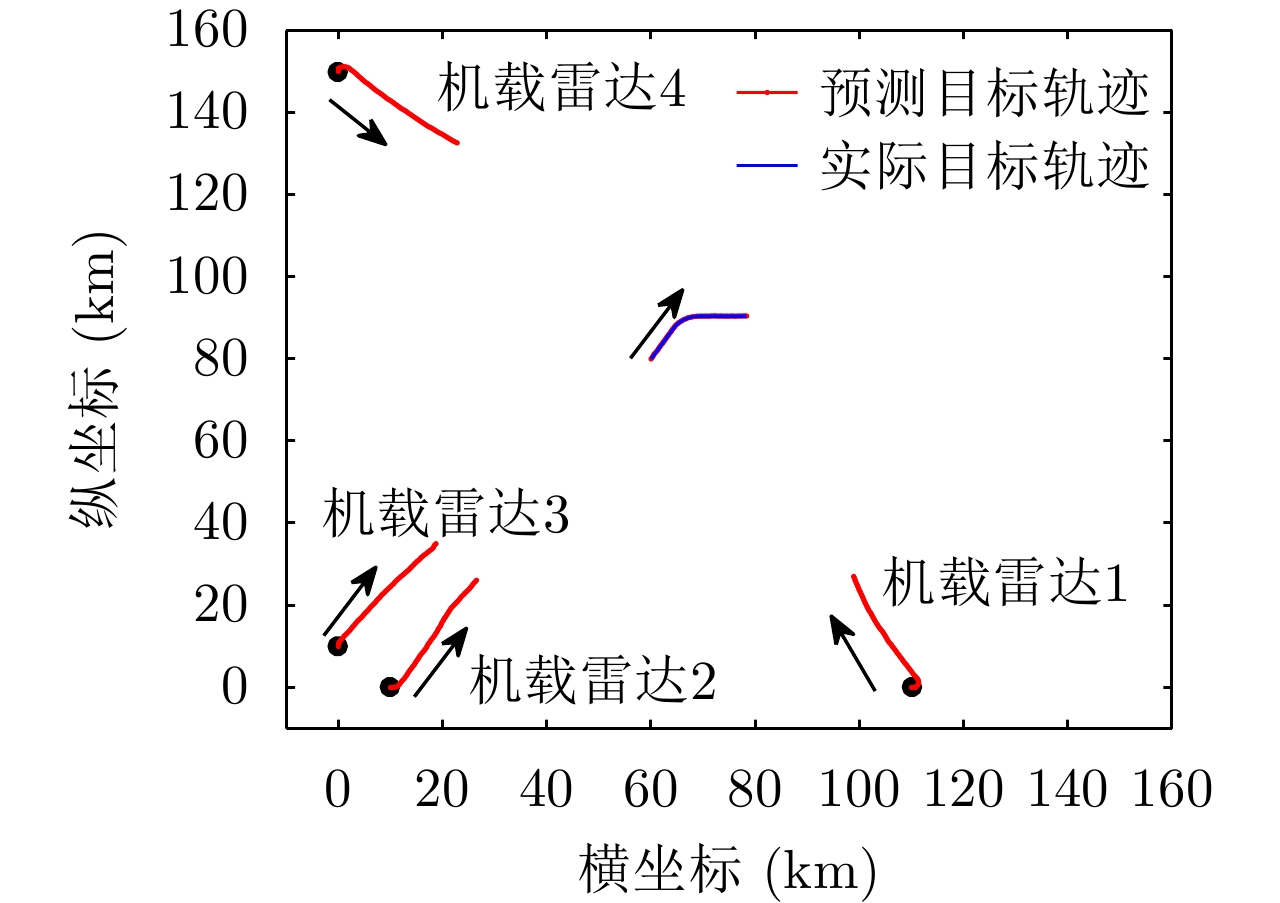
表 4 机载组网雷达初始状态
Table 4. The initial state of airborne radar network
雷达编号 初始位置(km) 初始速度(km/s) 初始朝向角(°) 机载雷达1 [110,0] 0.4 0 机载雷达2 [10,0] 0.4 0 机载雷达3 [0,10] 0.4 90 机载雷达4 [0,150] 0.4 90
下载: 导出CSV
-
[1] SKOLNIK M I, 左群声, 徐国良, 马林, 等译. 雷达系统导论[M]. 3版. 北京: 电子工业出版社, 2014: 191–199.SKOLNIK M I, ZUO Qunsheng, XU Guoliang, MA Lin, et al. translation. Introduction to Radar Systems[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2014: 191–199. [2] 刘宏伟, 严峻坤, 周生华. 网络化雷达协同探测技术[J]. 现代雷达, 2020, 42(12): 7–12. doi: 10.16592/j.cnki.1004-7859.2020.12.002LIU Hongwei, YAN Junkun, and ZHOU Shenghua. Collaborative detection technology of netted radar[J]. Modern Radar, 2020, 42(12): 7–12. doi: 10.16592/j.cnki.1004-7859.2020.12.002 [3] CHENG Ting, LI Shuyi, and ZHANG Jie. Adaptive resource management in multiple targets tracking for co-located multiple input multiple output radar[J]. IET Radar, Sonar & Navigation, 2018, 12(9): 1038–1045. doi: 10.1049/iet-rsn.2018.5153 [4] 张浩为, 谢军伟, 葛佳昂, 等. 基于波形调度的机动目标跟踪算法[J]. 电子学报, 2019, 47(3): 560–567. doi: 10.3969/j.issn.0372-2112.2019.03.007ZHANG Haowei, XIE Junwei, GE Jiaang, et al. Maneuvering target tracking based on waveform scheduling[J]. Acta Electronica Sinica, 2019, 47(3): 560–567. doi: 10.3969/j.issn.0372-2112.2019.03.007 [5] SUN Jun, LU Xiujuan, YUAN Ye, et al. Resource allocation for multi-target tracking in multi-static radar systems with imperfect detection performance[C]. 2020 IEEE Radar Conference, Florence, Italy, 2020: 1–6. [6] LI Xi, CHENG Ting, SU Yang, et al. Joint time-space resource allocation and waveform selection for the collocated MIMO radar in multiple targets tracking[J]. Signal Processing, 2020, 176: 107650. doi: 10.1016/j.sigpro.2020.107650 [7] YUAN Ye, YI Wei, HOSEINNEZHAD R, et al. Robust power allocation for resource-aware multi-target tracking with colocated MIMO radars[J]. IEEE Transactions on Signal Processing, 2021, 69: 443–458. doi: 10.1109/TSP.2020.3047519 [8] NGUYEN N H, DOĞANÇAY K, and DAVIS L M. Joint transmitter waveform and receiver path optimization for target tracking by multistatic radar system[C]. IEEE Workshop on Statistical Signal Processing (SSP), Gold Coast, Australia, 2014: 444–447. [9] 孟令同. 机载平台相控阵雷达波束和路径资源管理算法研究[D]. [硕士论文], 电子科技大学, 2019.MENG Lingtong. Research on beam and path resource management algorithm of phased array radar on airborne platform[D]. [Master dissertation], University of Electronic Science and Technology of China, 2019. [10] DASDEMIR E, KÖKSALAN M, and ÖZTÜRK D T. A flexible reference point-based multi-objective evolutionary algorithm: An application to the UAV route planning problem[J]. Computers & Operations Research, 2020, 114: 104811. doi: 10.1016/j.cor.2019.104811 [11] 张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41(7): 323692. doi: 10.7527/S1000-6893.2020.23692ZHANG Zhe, WU Jian, DAI Jiyang, et al. Fast penetration path planning for stealth UAV based on improved A-Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(7): 323692. doi: 10.7527/S1000-6893.2020.23692 [12] LU Xiujuan, YI Wei, and KONG Lingjiang. Joint online route planning and resource optimization for multitarget tracking in airborne radar systems[J]. IEEE Systems Journal, in press. [13] 魏永超, 邓岚, 李涛, 等. 采用改进细菌觅食优化算法的无人机航迹规划[J]. 电讯技术, 2021, 61(5): 560–566. doi: 10.3969/j.issn.1001-893x.2021.05.006WEI Yongchao, DENG Lan, LI Tao, et al. UAV track planning with improved bacterial foraging optimization algorithm[J]. Telecommunication Engineering, 2021, 61(5): 560–566. doi: 10.3969/j.issn.1001-893x.2021.05.006 [14] 廖文旭. 复杂环境下无人机航迹规划算法的研究[D]. [硕士论文], 电子科技大学, 2021.LIAO Wenxu. Research on path planning algorithm of unmanned aerial vehicle in complex environment[D]. [Master dissertation], University of Electronic Science and Technology of China, 2021. [15] PACE P E, 陈祝明, 江朝抒, 段锐, 译. 低截获概率雷达的检测与分类[M]. 2版. 北京: 国防工业出版社, 2012: 2–23.PACE P E, CHEN Zhuming, JIANG Chaoshu, and DUAN Rui, translation. Detecting and Classifying Low Probability of Intercept Radar[M]. 2nd ed. Beijing: National Defense Industry Press, 2012: 2–23. [16] 时晨光, 周建江, 汪飞, 等. 机载雷达组网射频隐身技术[M]. 北京: 国防工业出版社, 2019: 1–23.SHI Chenguang, ZHOU Jianjiang, WANG Fei, et al. Radio Frequency Stealth Technology for Airborne Radar Network[M]. Beijing: National Defense Industry Press, 2019: 1–23. [17] YAN Junkun, PU Wenqiang, LIU Hongwei, et al. Robust chance constrained power allocation scheme for multiple target localization in colocated MIMO radar system[J]. IEEE Transactions on Signal Processing, 2018, 66(15): 3946–3957. doi: 10.1109/TSP.2018.2841865 [18] SHI Chenguang, ZHOU Jianjiang, and WANG Fei. Adaptive resource management algorithm for target tracking in radar network based on low probability of intercept[J]. Multidimensional Systems and Signal Processing, 2018, 29(4): 1203–1226. doi: 10.1007/s11045-017-0494-8 [19] DAI Jinhui, YAN Junkun, WANG Penghui, et al. Optimal resource allocation for multiple target tracking in phased array radar network[C]. 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 2019: 1–4. [20] 赖作镁, 乔文昇, 古博, 等. 任务性能约束下传感器协同辐射控制策略[J]. 系统工程与电子技术, 2019, 41(8): 1749–1754. doi: 10.3969/j.issn.1001-506X.2019.08.11LAI Zuomei, QIAO Wensheng, GU Bo, et al. Research on sensor cooperative radiation control strategy under task performance constraints[J]. Systems Engineering and Electronics, 2019, 41(8): 1749–1754. doi: 10.3969/j.issn.1001-506X.2019.08.11 [21] GHOREISHIAN M J, ANDARGOLI S M H, and PARVARI F. Power allocation in MIMO radars based on LPI optimisation and detection performance fulfilment[J]. IET Radar, Sonar & Navigation, 2020, 14(6): 822–832. doi: 10.1049/iet-rsn.2020.0037 [22] 时晨光, 丁琳涛, 汪飞, 等. 面向射频隐身的组网雷达多目标跟踪下射频辐射资源优化分配算法[J]. 电子与信息学报, 2021, 43(3): 539–546. doi: 10.11999/JEIT200636SHI Chenguang, DING Lintao, WANG Fei, et al. Radio frequency stealth-based optimal radio frequency resource allocation algorithm for multiple-target tracking in radar network[J]. Journal of Electronics &Information Technology, 2021, 43(3): 539–546. doi: 10.11999/JEIT200636 [23] KALMAN R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering, 1960, 82(1): 35–45. doi: 10.1115/1.3662552 [24] KERSHAW D J and EVANS R J. Optimal waveform selection for tracking systems[J]. IEEE Transactions on Information Theory, 1994, 40(5): 1536–1550. doi: 10.1109/18.333866 [25] KERSHAW D J and EVANS R J. Waveform selective probabilistic data association[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(4): 1180–1188. doi: 10.1109/7.625110 [26] TICHAVSKY P, MURAVCHIK C H, and NEHORAI A. Posterior Cramer-Rao bounds for discrete-time nonlinear filtering[J]. IEEE Transactions on Signal Processing, 1998, 46(5): 1386–1396. doi: 10.1109/78.668800 [27] VAN TREES H L, BELL K L, and WANG Yige. Bayesian Cramer-Rao bounds for multistatic radar[C]. International Waveform Diversity & Design Conference, Lihue, USA, 2006: 1–4. [28] YAN Junkun, LIU Hongwei, PU Wenqiang, et al. Joint beam selection and power allocation for multiple target tracking in netted colocated MIMO radar system[J]. IEEE Transactions on Signal Processing, 2016, 64(24): 6417–6427. doi: 10.1109/TSP.2016.2607147 [29] 刘永坚, 司伟建, 杨承志. 现代电子战支援侦察系统分析与设计[M]. 北京: 国防工业出版社, 2016: 43–47.LIU Yongjian, SI Weijian, and YANG Chengzhi. Analysis and Design of Reconnaissance Systems in Modern ESM[M]. Beijing: National Defense Industry Press, 2016: 43–47. [30] 陈小龙, 薛永华, 张林, 等. 机载雷达系统与信息处理[M]. 北京: 电子工业出版社, 2021: 150–163.CHEN Xiaolong, XUE Yonghua, ZHANG Lin, et al. Airborne Radar System and Information Processing[M]. Beijing: Publishing House of Electronics Industry, 2021: 150–163. [31] 温正, 孙华克. MATLAB智能算法[M]. 北京: 清华大学出版社, 2017: 67–79.WEN Zheng and SUN Huake. MATLAB Intelligent Algorithm[M]. Beijing: Tsinghua University Press, 2017: 67–79. [32] BOYD S, VANDENBERGHE L, 王书宁, 许鋆, 黄晓霖, 译. 凸优化[M]. 北京: 清华大学出版社, 2013: 1–10.BOYD S, VANDENBERGHE L, WANG Shuning, XU Yun, and HUANG Xiaolin, translation. Convex Optimization[M]. Beijing: Tsinghua University Press, 2013: 1–10. [33] 刘宏强, 魏贤智, 李飞, 等. 基于射频隐身的雷达跟踪状态下单次辐射能量实时控制方法[J]. 电子学报, 2015, 43(10): 2047–2052. doi: 10.3969/j.issn.0372-2112.2015.10.025LIU Hongqiang, WEI Xianzhi, LI Fei, et al. The real time control method of radar single radiation power based on RF stealth at the tracking[J]. Acta Electronica Sinica, 2015, 43(10): 2047–2052. doi: 10.3969/j.issn.0372-2112.2015.10.025 [34] SHI Chenguang, WANG Fei, SALOUS S, et al. Joint transmitter selection and resource management strategy based on low probability of intercept optimization for distributed radar networks[J]. Radio Science, 2018, 53(9): 1108–1134. doi: 10.1029/2018RS006584. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

