
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Multiple Interference Suppression Algorithm Based on Airborne Bistatic Polarization Radar
-
摘要: 为了破解雷达主瓣干扰尤其是多个主副瓣干扰同时抑制的难题,该文利用目标极化散射特性在不同入射角存在差异而干扰近似相同的特点,将极化信息应用到机载双基地雷达,通过构建机载双基地极化敏感阵列来实现主副瓣干扰抑制。该方法主要通过双基地-极化分级抑制来实现。首先重构协方差矩阵遮蔽主瓣干扰来分别抑制双基地主辅雷达副瓣干扰,然后将辅雷达接收数据时域对齐后送主雷达,最后修正主辅雷达主瓣干扰导向矢量,并利用极化对消实现主瓣干扰抑制。仿真结果表明:利用双基地-极化分级抑制方法可实现多个主副瓣干扰同时抑制,大幅提升雷达系统抗干扰能力。Abstract: To solve the problem of the simultaneous suppression of main-lobe and side-lobe interferences, this study applies polarization information as input to the airborne bistatic radar and constructs an airborne bistatic polarization-sensitive array. The method is mainly realized by bistatic polarization hierarchical suppression. First, the reconstructed covariance matrix methods are used to suppress the side-lobe interference of the primary and auxiliary radars, Further, the data received by the airborne bistatic radar are aligned in the time domain, Finally, the main-lobe interference steering vector of the primary and auxiliary radars is corrected, and polarization cancellation is used to suppress the main-lobe interference. The simulation results show that the bistatic polarization classification method can simultaneously suppress multiple main-lobe and side-lobe interferences, and considerably improve the anti-interference capability of the radar system.
-
图 1 机载双基地极化敏感阵列信号模型
Figure 1. Signal model of airborne bistatic polarization-sensitive array
图 2 主副瓣干扰同时抑制流程
Figure 2. The main-lobe and side-lobe interference suppressed simultaneously
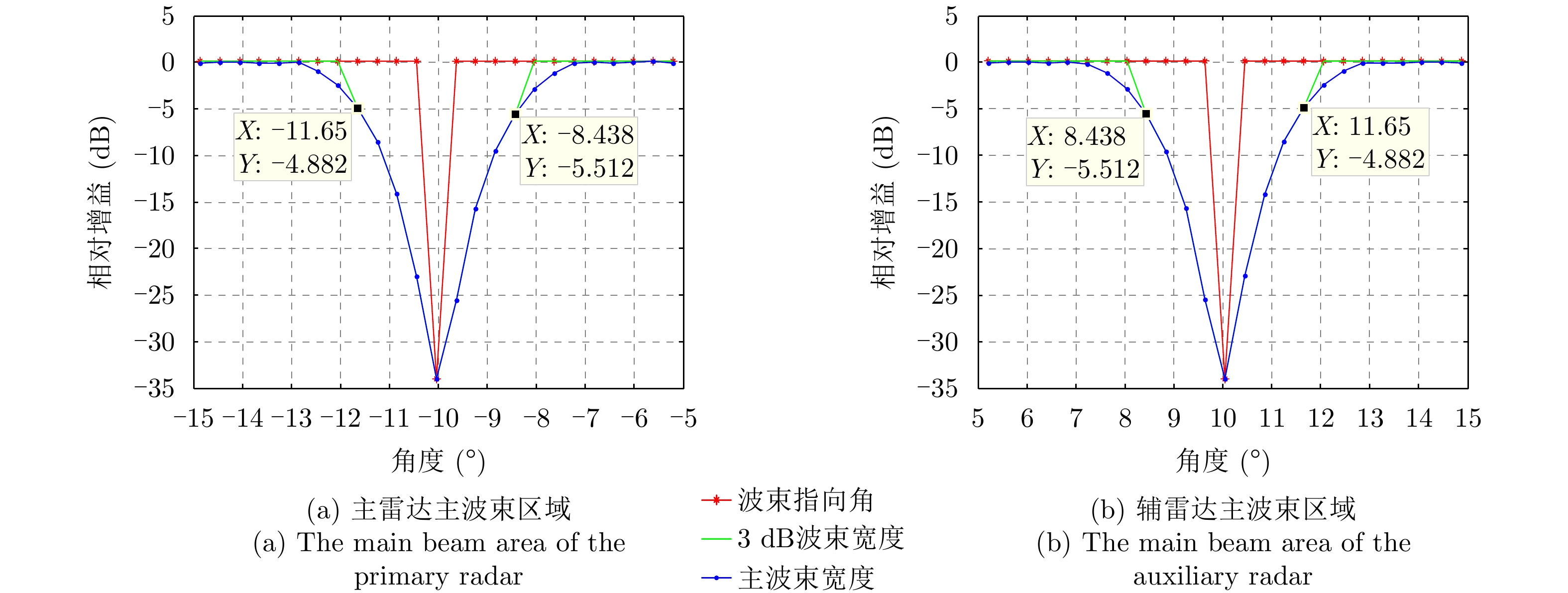
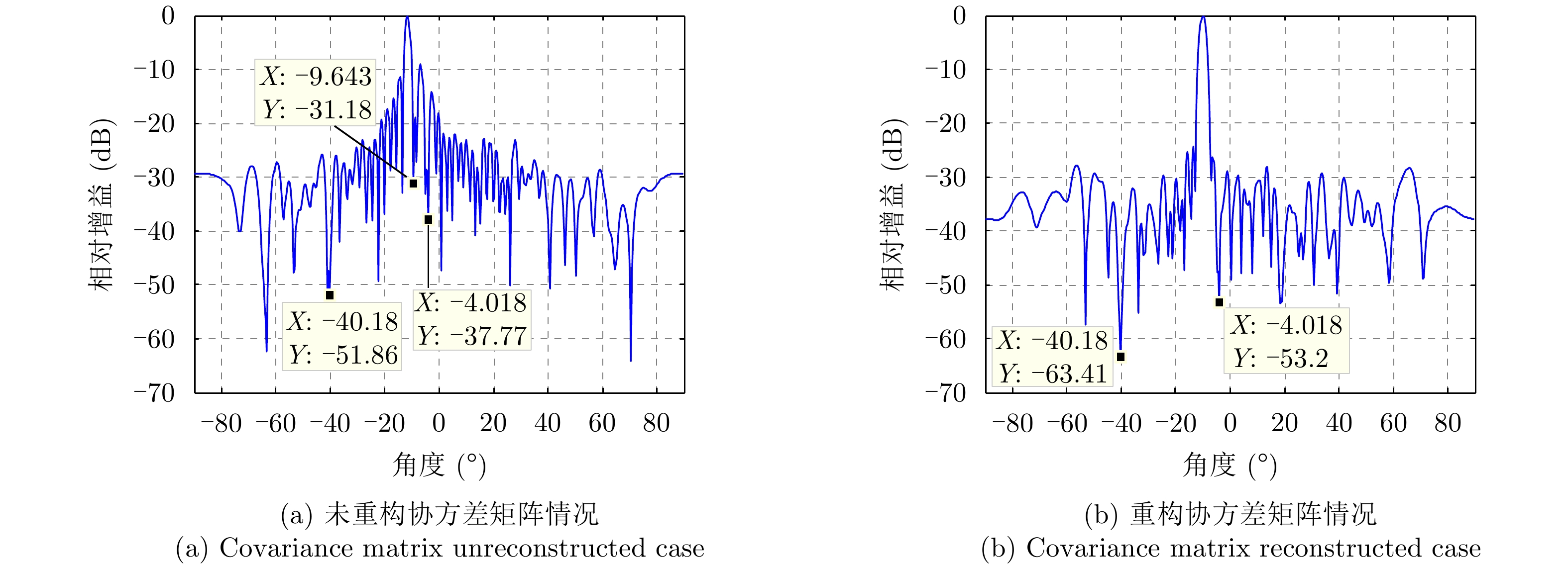
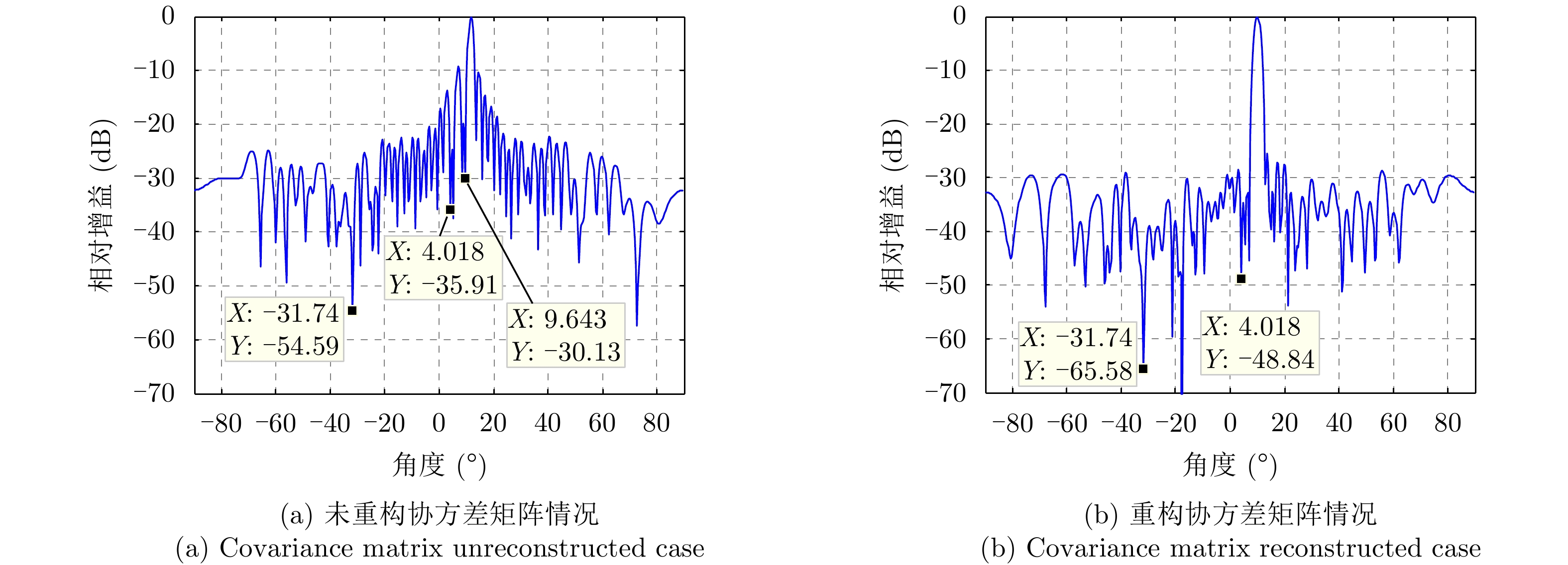
图 3 主辅雷达凹口构建仿真
Figure 3. Simulation of the primary and auxiliary radar notch construction
图 6 主辅雷达的目标空间-极化分布
Figure 6. The space-polarization of targets of the primary and auxiliary radar
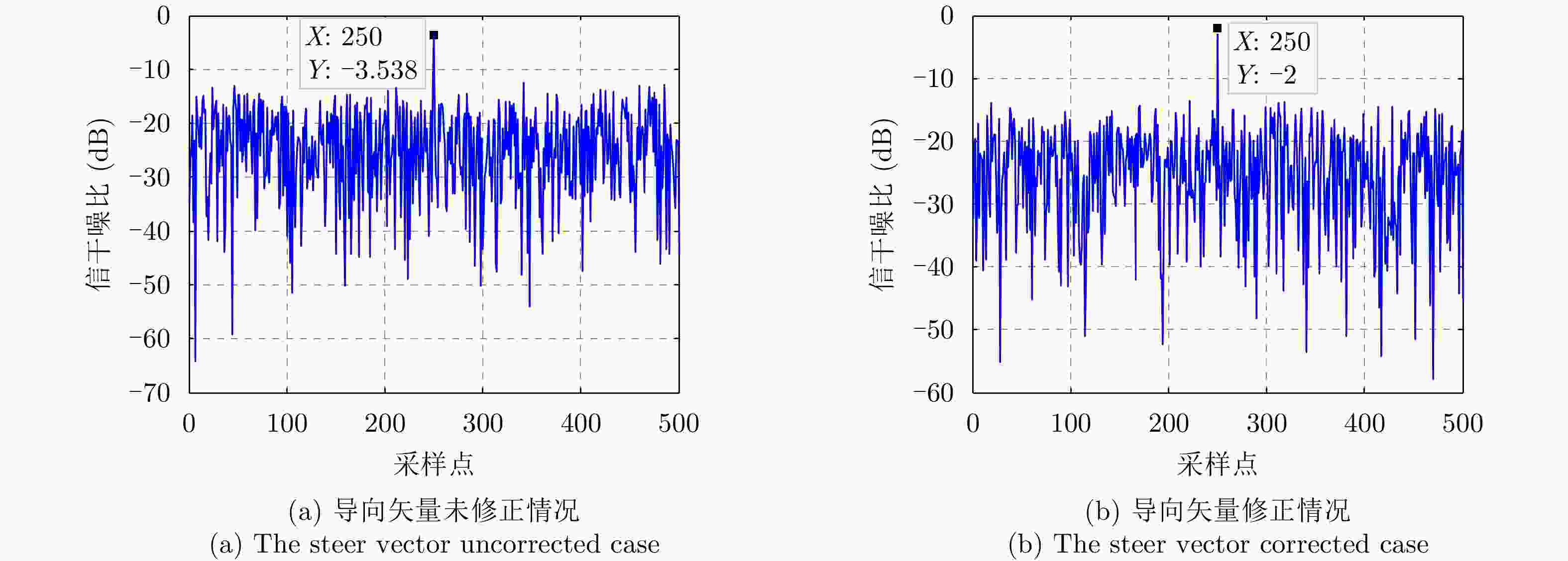
图 7 主瓣干扰对消后目标仿真
Figure 7. Simulation of target under the main-lobe interference suppressed
表 1 干扰与目标参数
Table 1. Interference and target parameters
类型 距主雷达距离(km) 入射角度(º) 距辅雷达距离(km) 入射角度(º) 干噪比/信噪比(dB) 干扰1 350.0 (85.9, –1) 350.0 (94.1, –1) 40 干扰2 300.0 (50.0, –1) 270.5 (58.2, –1) 40 干扰3 150.0 (80.4, –2) 150.0 (99.6, –2) 15 目标1 148.0 (80.3, –2) 148.0 (99.7, –2) 25  下载: 导出CSV
下载: 导出CSV
-
[1] 王雪松. 雷达极化技术研究现状与展望[J]. 雷达学报, 2016, 5(2): 119–131. doi: 10.12000/JR16039WANG Xuesong. Status and prospects of radar polarimetry techniques[J]. Journal of Radars, 2016, 5(2): 119–131. doi: 10.12000/JR16039 [2] 施龙飞, 任博, 马佳智, 等. 雷达极化抗干扰技术进展[J]. 现代雷达, 2016, 38(4): 1–7, 29. doi: 10.16592/j.cnki.1004-7859.2016.04.001SHI Longfei, REN Bo, MA Jiazhi, et al. Recent developments of radar anti-interference techniques with polarimetry[J]. Modern Radar, 2016, 38(4): 1–7, 29. doi: 10.16592/j.cnki.1004-7859.2016.04.001 [3] TAO Jianwu and CHANG Wenxiu. A novel combined beamformer based on hypercomplex processes[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1276–1289. doi: 10.1109/TAES.2013.6494413 [4] TAO Jianwu. Performance analysis for interference and noise canceller based on hypercomplex and spatio-temporal-polarisation processes[J]. IET Radar, Sonar & Navigation, 2013, 7(3): 277–286. doi: 10.1049/iet-rsn.2012.0151 [5] 文才, 王彤, 吴亿锋, 等. 极化-空域联合抗机载雷达欺骗式主瓣干扰[J]. 电子与信息学报, 2014, 36(7): 1552–1559. doi: 10.3724/SP.J.1146.2013.01739WEN Cai, WANG Tong, WU Yifeng, et al. Deceptive mainlobe jamming suppression for airborne radar based on joint processing in polarizational and spatial domains[J]. Journal of Electronics &Information Technology, 2014, 36(7): 1552–1559. doi: 10.3724/SP.J.1146.2013.01739 [6] GE Mengmeng, CUI Guolong, ZHANG Zhenghong, et al. Mainlobe jamming suppression via independent component analysis for polarimetric SIMO radar[C]. 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop, Hangzhou, China, 2020: 1–5. [7] GE Mengmeng, CUI Guolong, YU Xianxiang, et al. Mainlobe jamming suppression with polarimetric multi-channel radar via independent component analysis[J]. Digital Signal Processing, 2020, 106: 102806. doi: 10.1016/j.dsp.2020.102806 [8] LU Yawei, MA Jiazhi, SHI Longfei, et al. Multiple interferences suppression with space-polarization null-decoupling for polarimetrie array[J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 44–52. doi: 10.23919/JSEE.2021.000006 [9] AHMED A, SHOKRALLAH A M G, YUAN Zhao, et al. Deceptive jamming suppression in multistatic radar based on coherent clustering[J]. Journal of Systems Engineering and Electronics, 2018, 29(2): 269–277. doi: 10.21629/JSEE.2018.02.07 [10] LI Qiang, ZHANG Linrang, ZHOU Yu, et al. Hermitian distance-based method to discriminate physical targets and active false targets in a distributed multiple-radar architecture[J]. IEEE Sensors Journal, 2019, 19(22): 10432–10442. doi: 10.1109/JSEN.2019.2926414 [11] 赵珊珊, 刘子威. 多站雷达主瓣干扰抑制方法研究[J]. 电子科技大学学报, 2020, 49(4): 584–589. doi: 10.12178/1001-0548.2019178ZHAO Shanshan and LIU Ziwei. Main-lobe jamming suppression method in multiple-radar system[J]. Journal of University of Electronic Science and Technology of China, 2020, 49(4): 584–589. doi: 10.12178/1001-0548.2019178 [12] YU Hengli, LIU Nan, ZHANG Linrang, et al. An interference suppression method for multistatic radar based on noise subspace projection[J]. IEEE Sensors Journal, 2020, 20(15): 8797–8805. doi: 10.1109/JSEN.2020.2984389 [13] YANG Yang, SU Hongtao, HUANG Junsheng, et al. Adaptive monopulse estimation in mainlobe jamming for multistatic radar[C]. 2018 IEEE Radar Conference, Oklahoma City, USA, 2018: 257–262. [14] 黄大通, 崔国龙, 葛萌萌, 等. 多维信息联合的多基地雷达欺骗干扰抑制技术[J]. 信号处理, 2019, 35(8): 1324–1333. doi: 10.16798/j.issn.1003-0530.2019.08.006HUANG Datong, CUI Guolong, GE Mengmeng, et al. A suppression technique for deception jamming in multi-static radar system based on multi-dimensional information association[J]. Journal of Signal Processing, 2019, 35(8): 1324–1333. doi: 10.16798/j.issn.1003-0530.2019.08.006 [15] XIA Deping, ZHANG Liang, WU Tao, et al. A mainlobe interference suppression algorithm based on bistatic airborne radar cooperation[C]. 2019 IEEE Radar Conference, Boston, USA, 2019: 1–6. [16] MENG Jinli and WANG Ning. Main-lobe jamming cancellation for multi-static radar by joint range-Doppler processing[J]. The Journal of Engineering, 2019, 2019(20): 6807–6810. doi: 10.1049/joe.2019.0617 [17] 孙闽红, 丁辰伟, 张树奇, 等. 基于统计相关差异的多基地雷达拖引欺骗干扰识别[J]. 电子与信息学报, 2020, 42(12): 2992–2998. doi: 10.11999/JEIT190634SUN Minhong, DING Chenwei, ZHANG Shuqi, et al. Recognition of deception jamming based on statistical correlation difference in a multistatic radar system[J]. Journal of Electronics &Information Technology, 2020, 42(12): 2992–2998. doi: 10.11999/JEIT190634 [18] ZHAO Shanshan, ZHANG Linrang, ZHOU Yu, et al. Study of multistatic radar against false targets jamming using spatial scattering properties[C]. 2014 IEEE International Conference on Computer and Information Technology, Xi’an, China, 2014: 129–133. [19] 宁立跃, 杨小鹏. 多基地极化雷达主瓣干扰抑制算法[J]. 信号处理, 2017, 33(12): 1571–1577. doi: 10.16798/j.issn.1003-0530.2017.12.007NING Liyue and YANG Xiaopeng. Multi-base polarization radar main-lobe interference suppression algorithm[J]. Journal of Signal Processing, 2017, 33(12): 1571–1577. doi: 10.16798/j.issn.1003-0530.2017.12.007 [20] ZHU Xingyu, XU Xu, and YE Zhongfu. Robust adaptive beamforming via subspace for interference covariance matrix reconstruction[J]. Signal Processing, 2020, 167: 107289. doi: 10.1016/j.sigpro.2019.107289 [21] LI Jian, STOICA P, and WANG Zhisong. On robust Capon beamforming and diagonal loading[J]. IEEE Transactions on Signal Processing, 2003, 51(7): 1702–1715. doi: 10.1109/TSP.2003.812831 -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

