
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Long Time Coherent Integration Method Based on Combining Pulse Compression and Radon-Fourier Transform
-
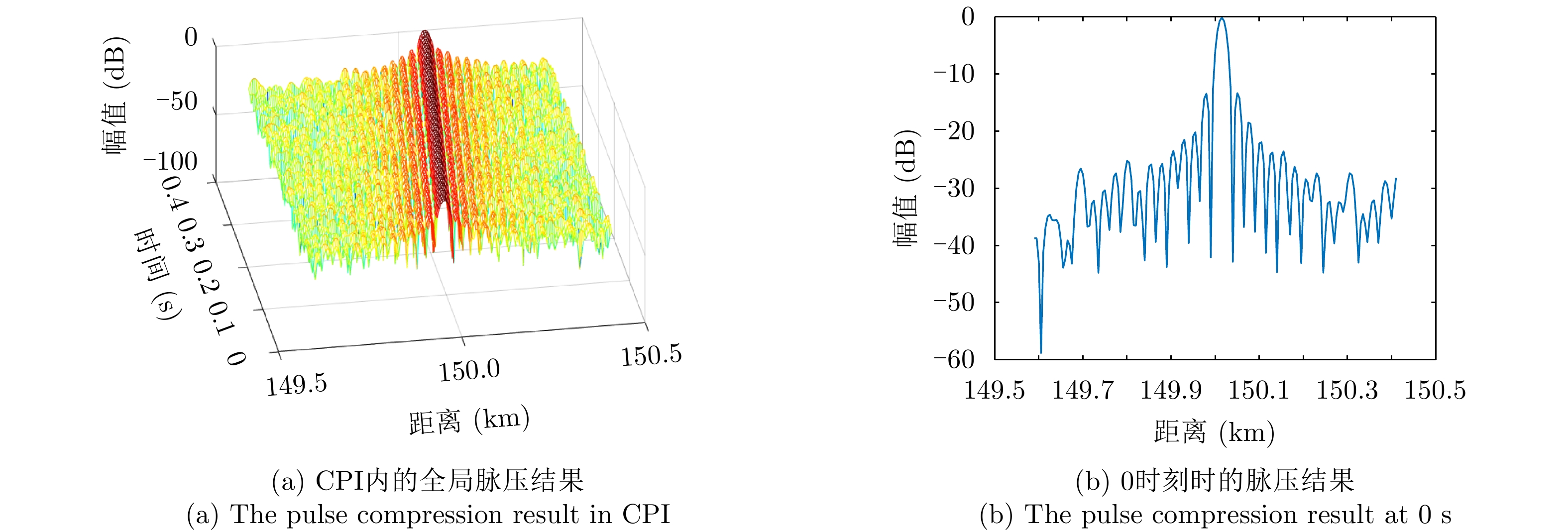
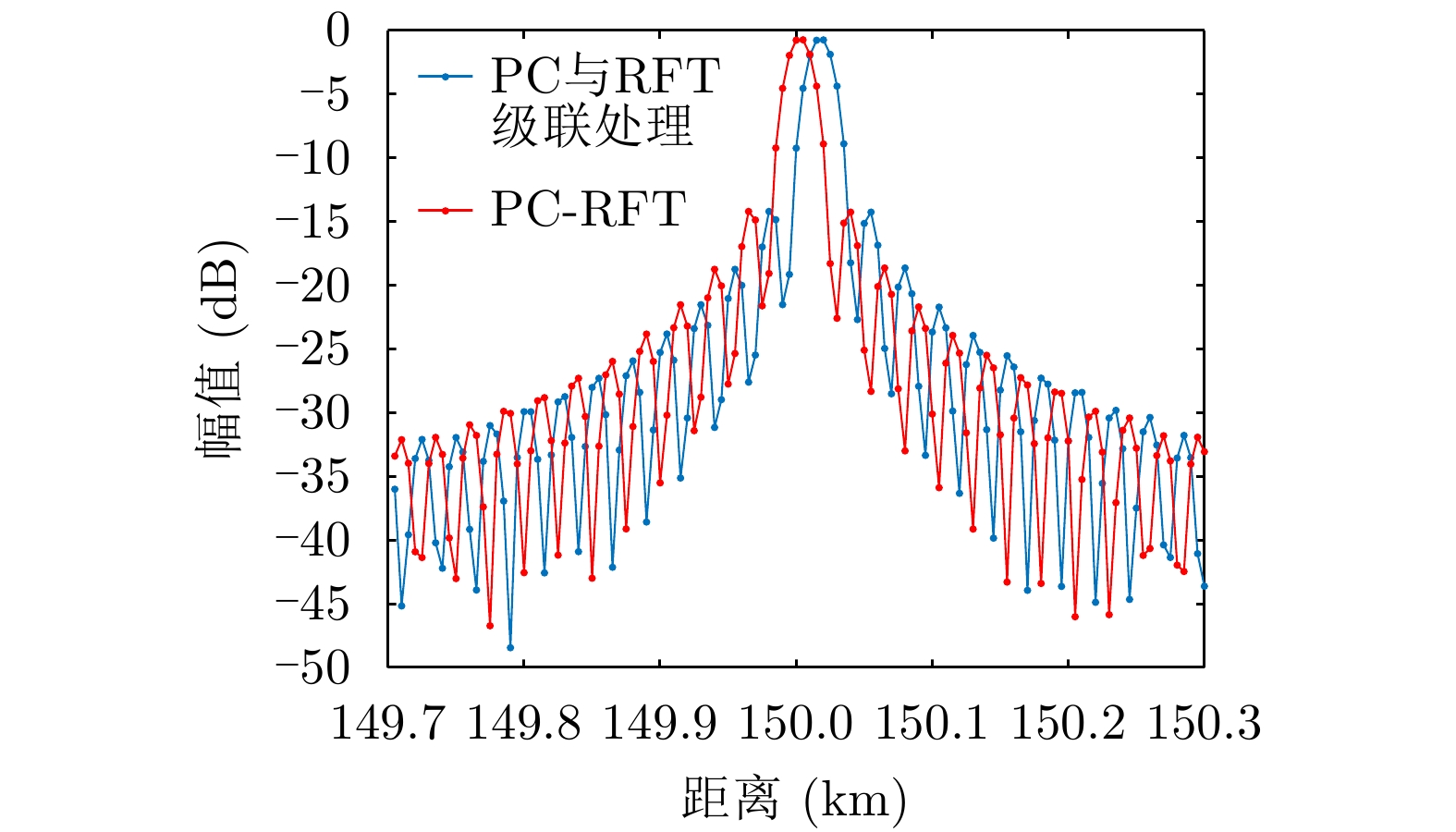
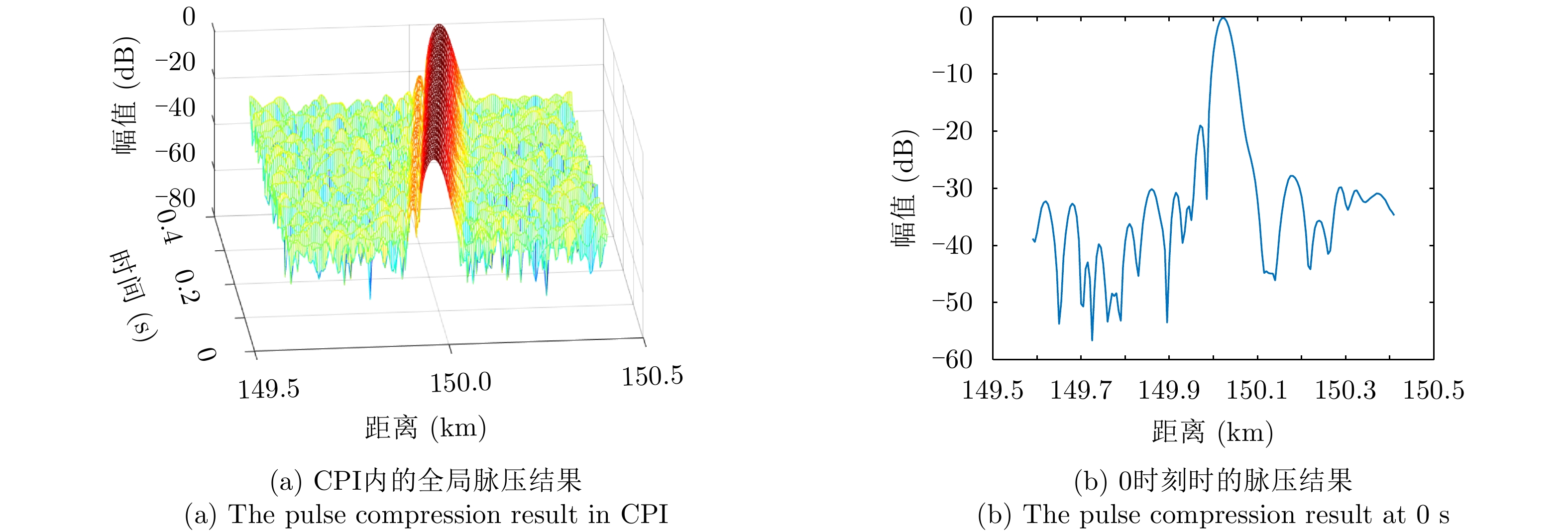
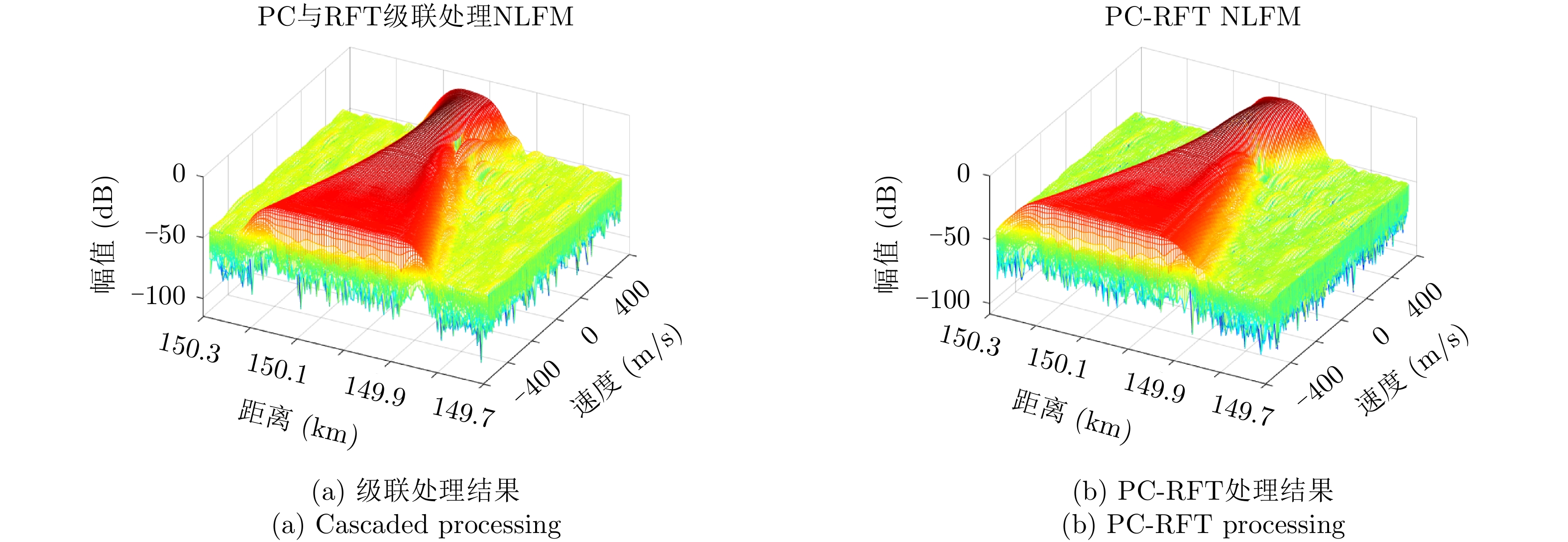
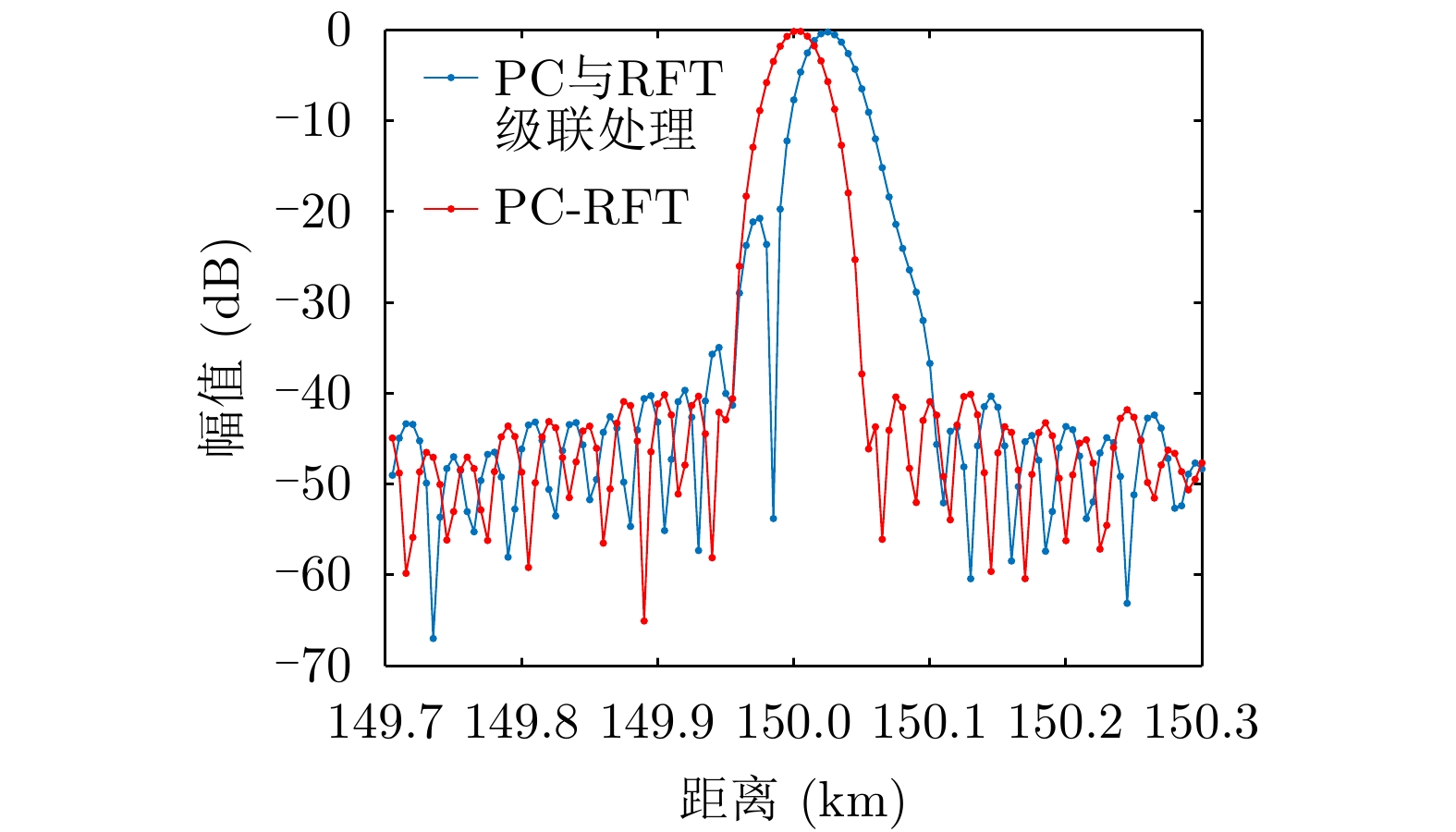
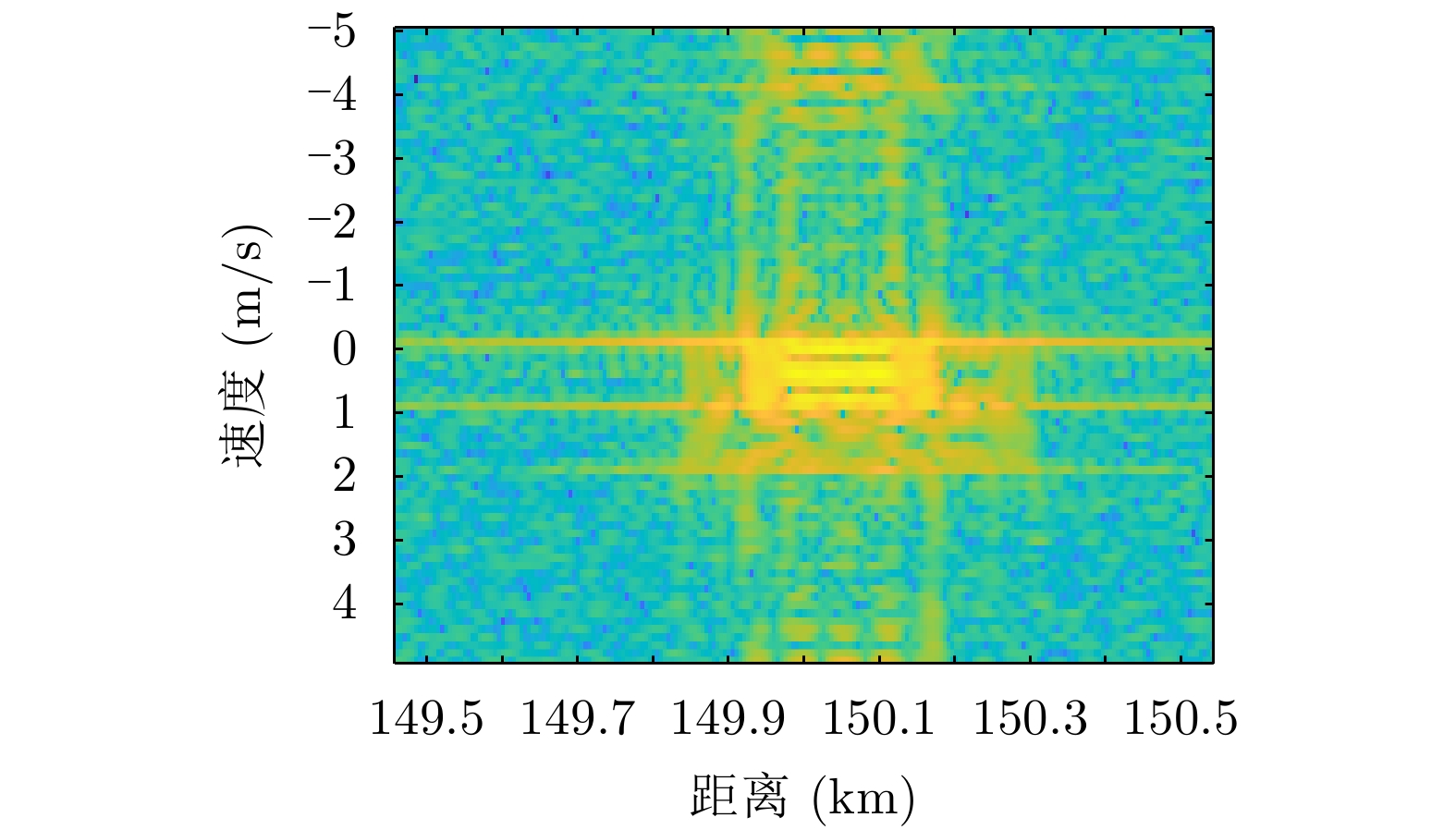
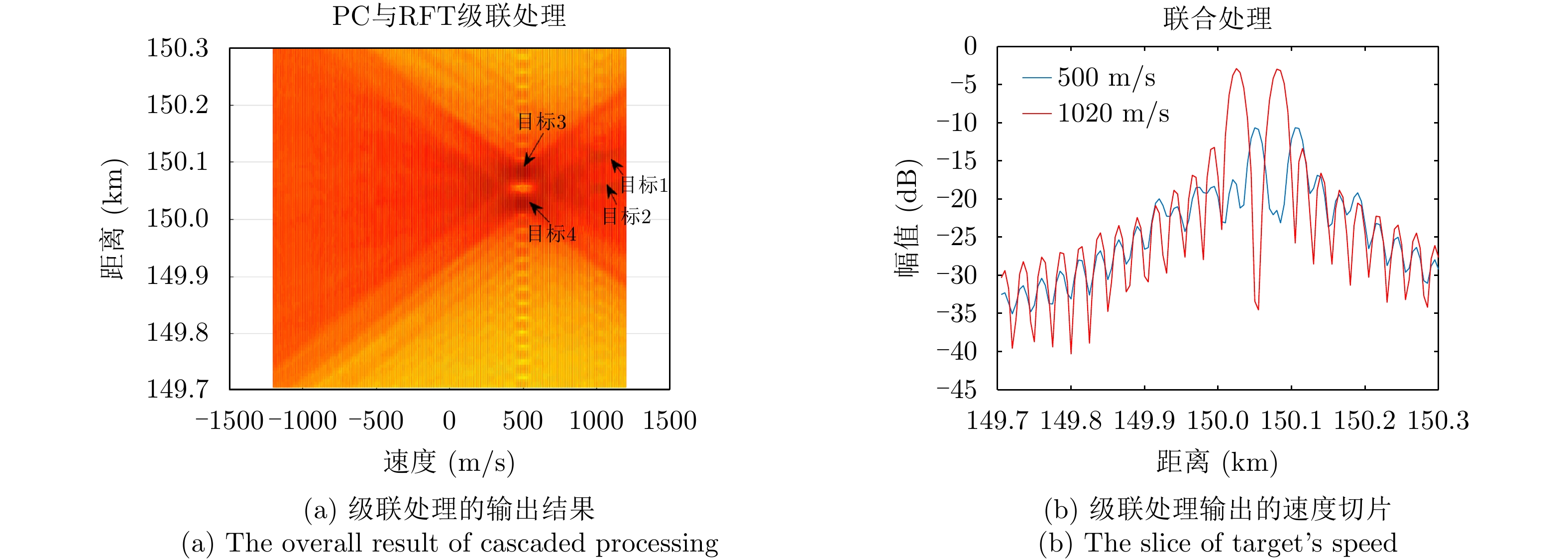
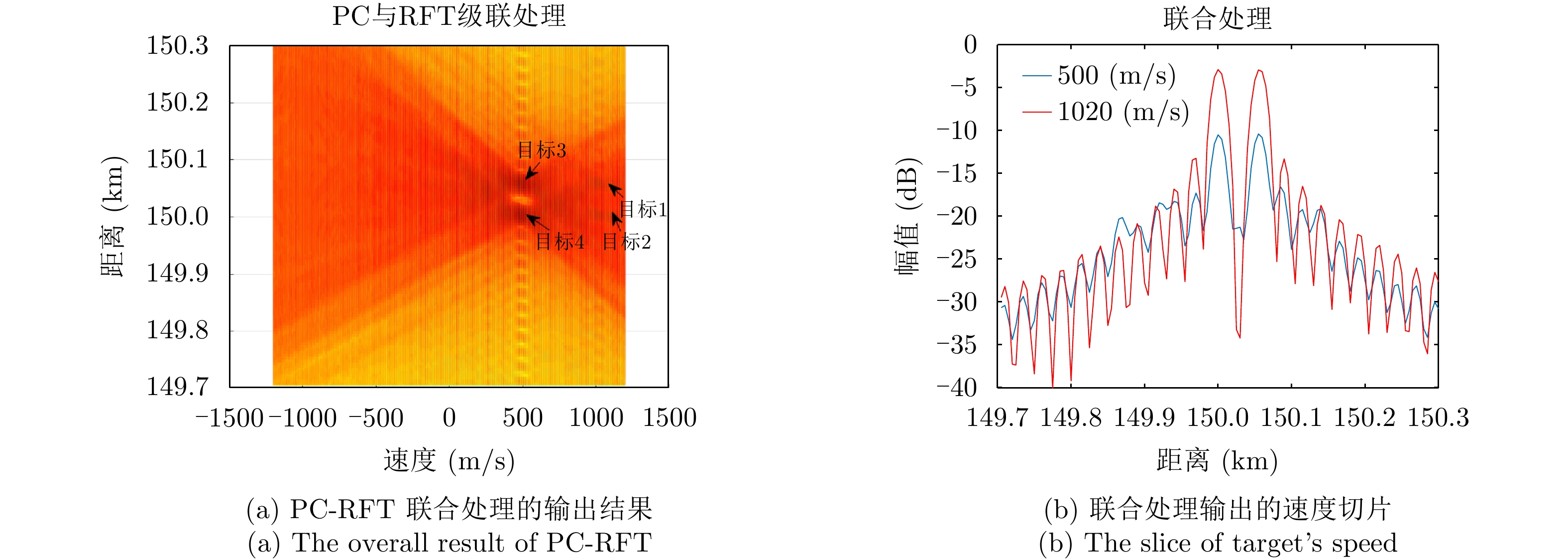
摘要: 传统相干雷达信号处理流程中先脉冲压缩再相参处理的级联处理在理论上无法实现对高速目标回波能量的最大化积累,级联处理的输出结果中目标峰值位置存在偏差,甚至还伴随主瓣展宽、增益下降、旁瓣增高的问题。为此该文提出一种联合脉压与Radon傅里叶变换(PC-RFT)的长时间相参积累方法,利用信号之间的相关关系将匹配滤波与Radon傅里叶变换相结合,在快时间(脉内时间)与慢时间(脉间时间)维度上同时补偿脉内和脉间的多普勒频移,从而实现目标增益的最大化。实验表明二维联合处理的性能明显优于级联处理。
-
关键词:
- 脉冲压缩 /
- Radon傅里叶变换 /
- 长时间相参积累 /
- 脉内多普勒频率 /
- 二维联合处理
Abstract: In the traditional coherent radar signal processing, the cascaded processing with pulse compression followed by coherent integration cannot achieve the maximum accumulation of high-speed target’s echo energy in theory. In addition, the result of the cascaded processing is characterized by deviation in the target peak position, accompanied by problems, such as the broadening of the main lobe, a decrease in the gain, and an increase in the side lobes. Therefore, this paper proposes a long time coherent integration method combining Pulse Compression and Radon-Fourier Transform (PC-RFT). This method utilizes the correlation between signals to combine matched filter and RFT. To maximize the target gain, the fast time (intra-pulse time) and slow time (inter-pulse time) dimensions are combined to compensate for the intra-pulse and inter-pulse Doppler shifts. The experimental results show that the two-dimensional joint processing outperforms the cascaded processing. -
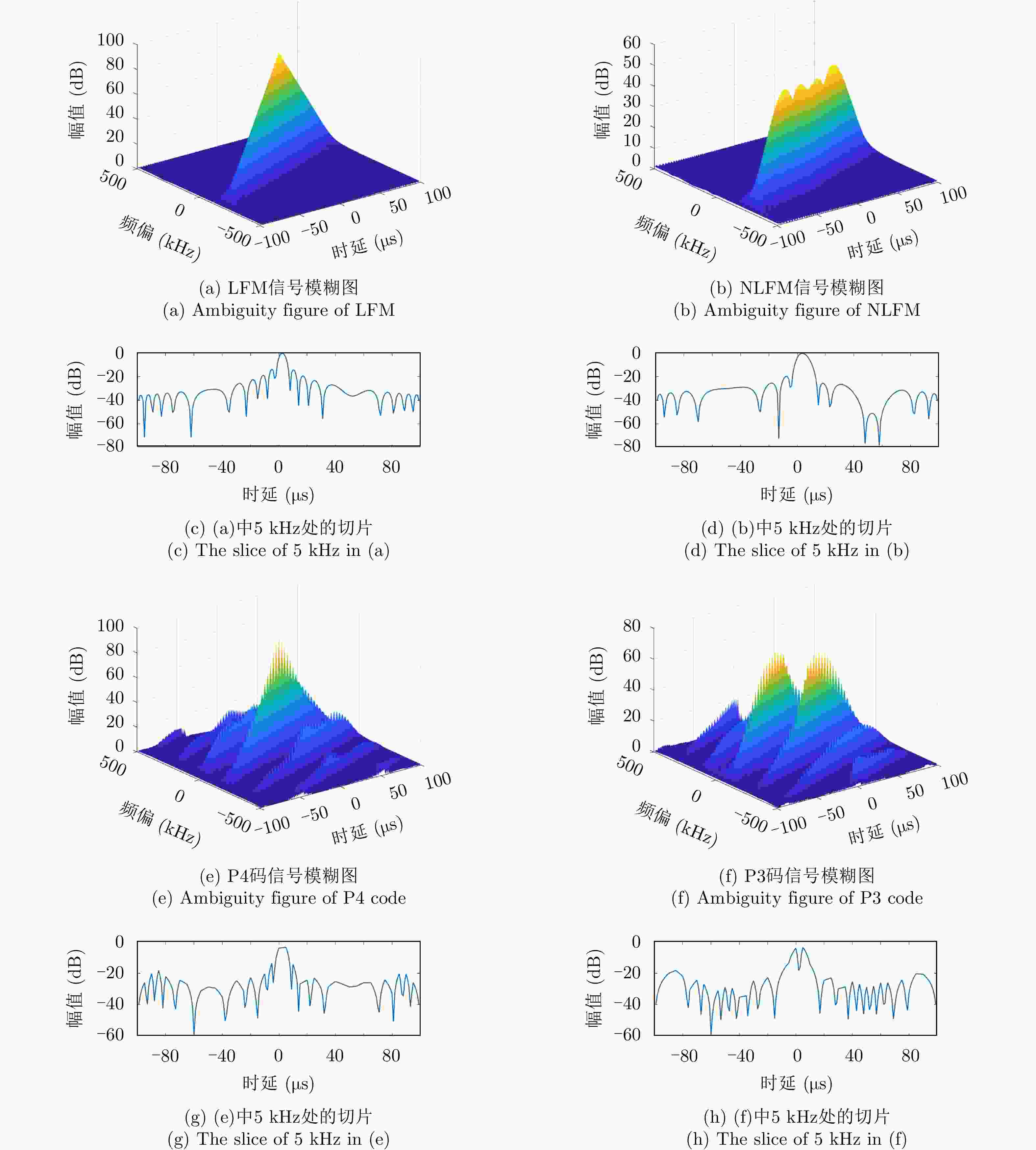
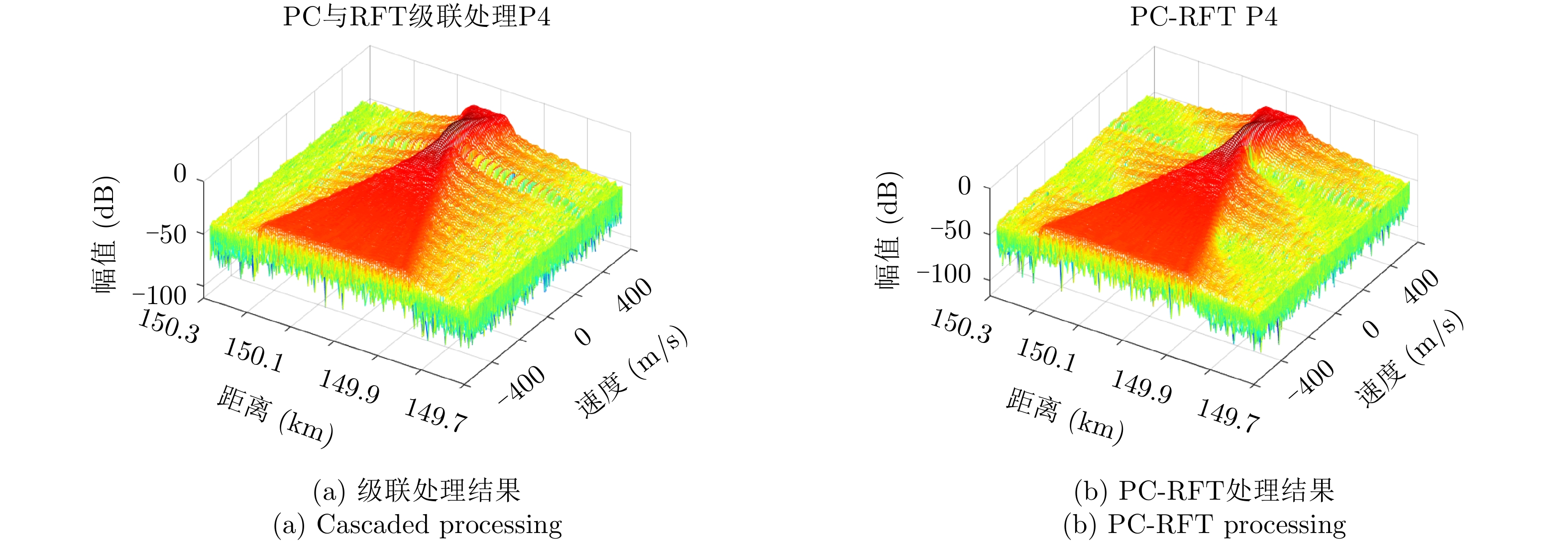
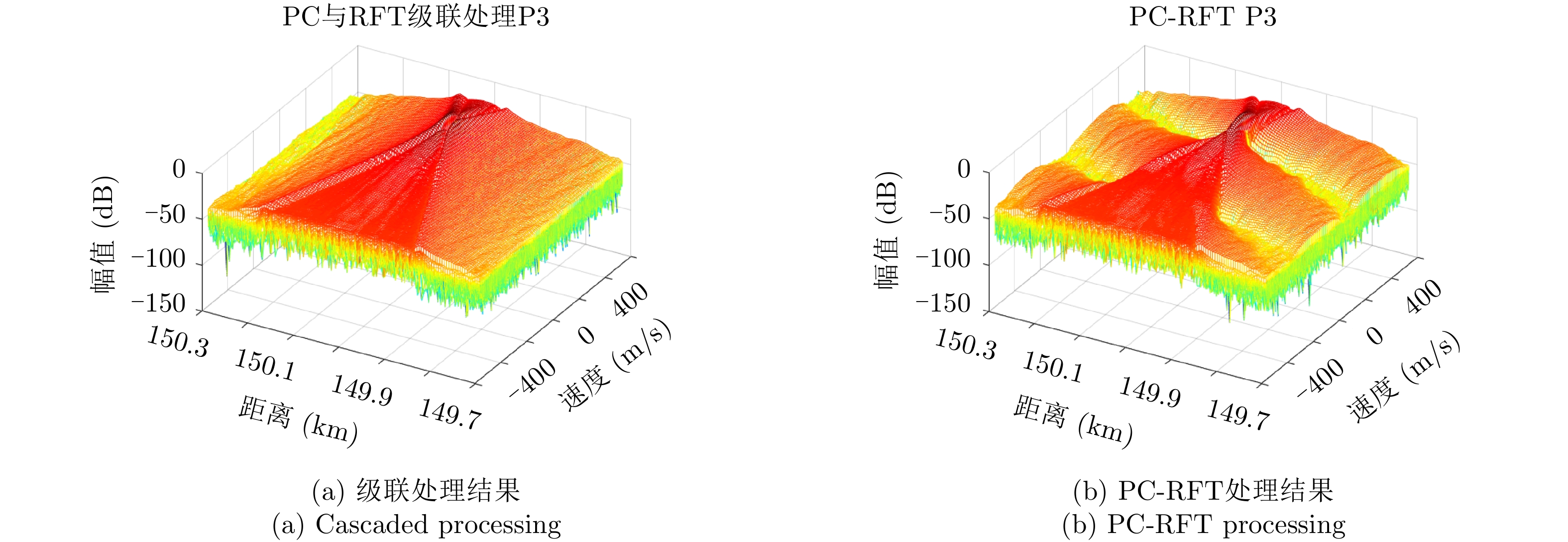
图 1 LFM信号,NLFM信号,P4和P3编码信号的模糊函数
Figure 1. Ambiguity figure of LFM, NLFM, P4 and P3 code
-
[1] RICHARDS M A. Fundamentals of Radar Signal Processing[M]. McGraw-Hill Education and Publishing House of Electronics Industry, 2014: 180–225. [2] TAO Ran, ZHANG Ning, and WANG Yunchu. Analysing and compensating the effects of range and Doppler frequency migrations in linear frequency modulation pulse compression radar[J]. IET Radar, Sonar & Navigation, 2011, 5(1): 12–22. doi: 10.1049/iet-rsn.2009.0265 [3] SUO Pangcun, TAO Shan, TAO Ran, et al. Detection of high-speed and accelerated target based on the linear frequency modulation radar[J]. IET Radar, Sonar & Navigation, 2014, 8(1): 37–47. doi: 10.1049/iet-rsn.2013.0001 [4] CHEN Xiaolong, GUAN Jian, LIU Ningbo, et al. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration[J]. IEEE Transaction on Signal Processing, 2014, 62(4): 939–953. doi: 10.1109/TSP.2013.2297682 [5] CHEN Xiaolong, GUAN Jian, CHEN Weishi, et al. Sparse long-time coherent integration-based detection method for radar low-observable maneuvering target[J]. IET Radar, Sonar and Navigation, 2020, 14(4): 538–546. doi: 10.1049/iet-Isn.2019.0313 [6] 陈小龙, 黄勇, 关键, 等. MIMO雷达微弱目标长时积累技术综述[J]. 信号处理, 2020, 36(12): 1947–1964. doi: 1016798/j.issn.1003-0530.2020.12.001CHEN Xiaolong, HUANG Yong, GUAN Jian, et al. Summary of long-time integration techniques for weak targets of MIMO radar[J]. Journal of Signal Processing, 2020, 36(12): 1947–1964. doi: 1016798/j.issn.1003-0530.2020.12.001 [7] 关键, 陈小龙, 于晓涵. 雷达高速高机动目标长时间相参积累检测方法[J]. 信号处理, 2017, 33(3A): 1–8. doi: 10.16798/j.issn.1003-0530.2017.3A.001GUAN Jian, CHEN Xiao-long, and YU Xiao-han. Long-time coherent integration-based detection method forhigh-apeedand highly maneuvering radar target[J]. Journal of Signal Proceasing, 2017, 33(3A): 1–8. doi: 10.16798/j.issn.1003-0530.2017.3A.001 [8] 陈小龙, 陈唯实, 饶云华, 等. 飞鸟与无人机目标雷达探测与识别技术进展与展望[J]. 雷达学报, 2020, 9(5): 803–827. doi: 10.12000/JR20068CHEN Xiaolong, CHEN Weiehi, RAO Yunhua, et al. Progrecs and proapecte of radar target detection and recognition technology for flying birda and unmanned aerial vehicles[J]. Journal of Radars, 2020, 9(5): 803–827. doi: 10.12000/JR20068 [9] LI Yang, ZENG Tao, LONG Teng, et al. Range migration compensation and Doppler ambiguity resolution by Keystone transform[C]. 2006 CIE International Conference on Radar, Shanghai, China, 2006: 1–4. [10] REED I S, GAGLIARDI R M, and STOTTS L B. Optical moving target detection with 3-D matched filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1988, 24(4): 327–336. doi: 10.1109/7.7174 [11] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection, I: Generalized Doppler filter bank[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1186–1202. doi: 10.1109/TAES.2011.5751251 [12] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection (II): Blind speed sidelobe suppression[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2473–2489. doi: 10.1109/TAES.2011.6034645 [13] YU Ji, XU Jia, PENG Yingning, et al. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 991–1004. doi: 10.1109/TAES.2012.6178044 [14] QIAN Lichang, XU Jia, XIA Xianggen, et al. Fast implementation of generalised Radon-Fourier transform for manoeuvring radar target detection[J]. Electronics Letters, 2012, 48(22): 1427–1428. doi: 10.1049/el.2012.2255 [15] LIN Lanjin, SUN Guohao, CHENG Ziyang, et al. Long-time coherent integration for maneuvering target detection based on ITRT-MRFT[J]. IEEE Sensors Journal, 2020, 20(7): 3718–3731. doi: 10.1109/JSEN.2019.2960323 [16] LI Xiaolong, CUI Guolong, YI Wei, et al. Sequence-reversing transform-based coherent integration for high-speed target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1573–1580. doi: 10.1109/TAES.2017.2668018 [17] CHEN Shuailin, LUO Feng, ZHANG Linrang, et al. Coherent integration detection method for maneuvering target based on dynamic programming[J]. AEU - International Journal of Electronics and Communications, 2017, 73: 46–49. doi: 10.1016/j.aeue.2016.12.021 [18] ZHOU Gongjian, XU Zeyu, and YANG Yuchao. Coherent integration for targets with constant Cartesian velocities based on accurate range model[J]. Digital Signal Processing, 2021, 116: 103092. doi: 10.1016/j.dsp.2021.103092 [19] 丁鹭飞, 耿富录, 陈建春. 雷达原理. 第5版[M]. 电子工业出版社, 2014: 381–385.DING Lufei, GENG Fulu, and CHEN Jianchun. Radar Principles[M]. 5th ed. Beijing: Publishing House of Electronics Industry, 2014: 381–385. [20] 段毅, 商哲然, 谭贤四, 等. 面向雷达高速目标检测的RFT快速实现方法[J]. 系统工程与电子技术, 2018, 40(6): 1233–1240. doi: 10.3969/j.issn.1001-506X.2018.06.07DUAN Yi, SHANG Zheran, TAN Xiansi, et al. Fast implementation of RFT for radar hypersonic targets detection[J]. Systems Engineering and Electronics, 2018, 40(6): 1233–1240. doi: 10.3969/j.issn.1001-506X.2018.06.07 [21] 钱李昌, 许稼, 孙文峰, 等. 基于雷达脉冲重复间隔设计的Radon-Fourier变换盲速旁瓣抑制[J]. 电子与信息学报, 2012, 34(11): 2608–2614. doi: 10.3724/SP.J.1146.2012.00724QIAN Lichang, XU Jia, SUN Wenfeng, et al. Blind speed side lobe suppression in Radon-Fourier transform based on radar pulse recurrence interval design[J]. Journal of Electronics &Information Technology, 2012, 34(11): 2608–2614. doi: 10.3724/SP.J.1146.2012.00724 [22] 钱李昌, 许稼, 孙文峰, 等. 基于宽带时空Radon-Fourier变换的高速微弱目标检测方法[J]. 电子与信息学报, 2013, 35(1): 15–23. doi: 10.3724/SP.J.1146.2012.01094QIAN Lichang, XU Jia, SUN Wenfeng, et al. Wideband time-space Radon-Fourier transform for high-speed and weak target detection[J]. Journal of Electronics &Information Technology, 2013, 35(1): 15–23. doi: 10.3724/SP.J.1146.2012.01094 [23] 陈潜, 付朝伟, 刘俊豪, 等. 基于随机脉冲重复间隔Radon-Fourier变换的相参积累[J]. 电子与信息学报, 2015, 37(5): 1085–1090. doi: 10.11999/JEIT140818CHEN Qian, FU Chaowei, LIU Junhao, et al. Coherent integration based on random pulse repetition interval Radon-Fourier transform[J]. Journal of Electronics &Information Technology, 2015, 37(5): 1085–1090. doi: 10.11999/JEIT140818 [24] 吴兆平, 符渭波, 苏涛, 等. 基于快速Radon-Fourier变换的雷达高速目标检测[J]. 电子与信息学报, 2012, 34(8): 1866–1871. doi: 10.3724/SP.J.1146.2011.01180WU Zhaoping, FU Weibo, SU Tao, et al. High speed radar target detection based on fast Radon-Fourier transform[J]. Journal of Electronics &Information Technology, 2012, 34(8): 1866–1871. doi: 10.3724/SP.J.1146.2011.01180 [25] 钱李昌, 许稼, 孙文峰, 等. 基于多载频MIMO雷达的Radon-Fourier变换盲速旁瓣抑制[J]. 航空学报, 2013, 34(5): 1181–1190. doi: 10.7527/S1000-6893.2013.0073QIAN Lichang, XU Jia, SUN Wenfeng, et al. Blind speed side lobe suppression in Radon-Fourier transform based on MIMO radar with multi-carrier frequency[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(5): 1181–1190. doi: 10.7527/S1000-6893.2013.0073 [26] 林春风, 黄春琳, 粟毅. 双基地雷达Radon-Fourier变换弱目标积累检测[J]. 雷达学报, 2016, 5(5): 526–530. doi: 10.12000/JR16049LIN Chunfeng, HUANG Chunlin, and SU Yi. Target integration and detection with the Radon-Fourier transform for bistatic radar[J]. Journal of Radars, 2016, 5(5): 526–530. doi: 10.12000/JR16049 [27] 钱李昌, 许稼, 胡国旭. 非合作无源双基地雷达弱目标长时间积累技术[J]. 雷达学报, 2017, 6(3): 259–266. doi: 10.12000/JR16137QIAN Lichang, XU Jia, and HU Guoxu. Long-time integration of a multi-waveform for weak target detection in non-cooperative passive bistatic radar[J]. Journal of Radars, 2017, 6(3): 259–266. doi: 10.12000/JR16137 [28] 钱李昌, 许稼, 孙文峰, 等. 宽带Radon-Fourier变换及基于CZT快速实现方法研究[J]. 现代雷达, 2013, 35(4): 39–44. doi: 10.3969/j.issn.1004-7859.2013.04.009QIAN Lichang, XU Jia, SUN Wenfeng, et al. A study on wideband Radon-Fourier transform and its fast implementation based on CZT[J]. Modern Radar, 2013, 35(4): 39–44. doi: 10.3969/j.issn.1004-7859.2013.04.009 [29] RICHARDS M A. Fundamentals of Radar Signal Processing[M]. New York: McGraw-Hill, 2005: 230–231. [30] COLLINS T and ATKINS P. Nonlinear frequency modulation chirps for active sonar[J]. IEE Proceedings-Radar, Sonar and Navigation, 1999, 146(6): 312–316. doi: 10.1049/ip-rsn:19990754 -

 下载:
下载:






图(20)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

