
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
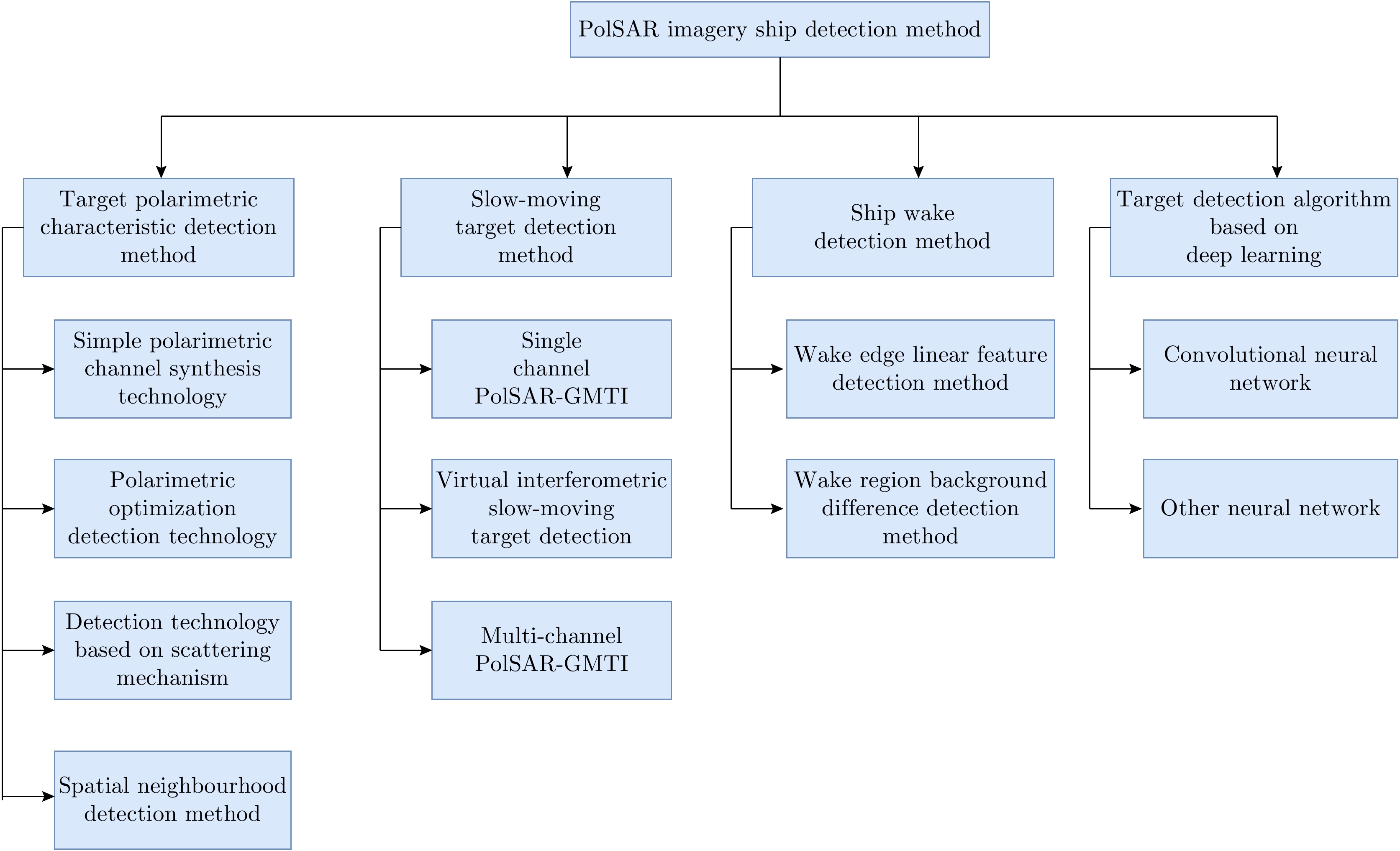
摘要: 极化合成孔径雷达(PolSAR)使用二维脉冲压缩技术获取高分辨力极化信息图像,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海上舰船目标检测等领域。如何解决复杂海杂波的建模与参数估计、慢小目标检测、密集目标检测等问题仍然是当前PolSAR图像舰船目标检测的难点。该文归纳梳理了PolSAR图像舰船目标检测的4类主流方法:极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法以及基于深度学习的目标检测方法等,同时给出了各类方法所存在的问题以及可能的解决方法,并预测了其未来研究重点和发展趋势。Abstract: Polarimetric Synthetic Aperture Radar (PolSAR) uses two-dimensional pulse compression to obtain high-resolution images containing polarimetric information. PolSAR has been widely used in military reconnaissance, topographic mapping, environmental and natural disaster monitoring, marine ship detection, and related fields. Addressing the problems associated with sea-clutter modelling and parameter estimation, slow and small target detection, dense target detection, as well as other issues, still remains a challenge in PolSAR ship detection. In this paper, four main classes for PolSAR ship detection are summarized: target polarimetric feature detection, slow and small target detection, ship wake detection, and deep learning detection. In addition, the possible solutions to existing problems in each class are given, and their future development trends are predicted, which can provide some valuable suggestions for interested researchers.
-
Key words:
- Polarimetric SAR /
- Ship detection /
- Performance comparison /
- Development history /
- Future trend
-





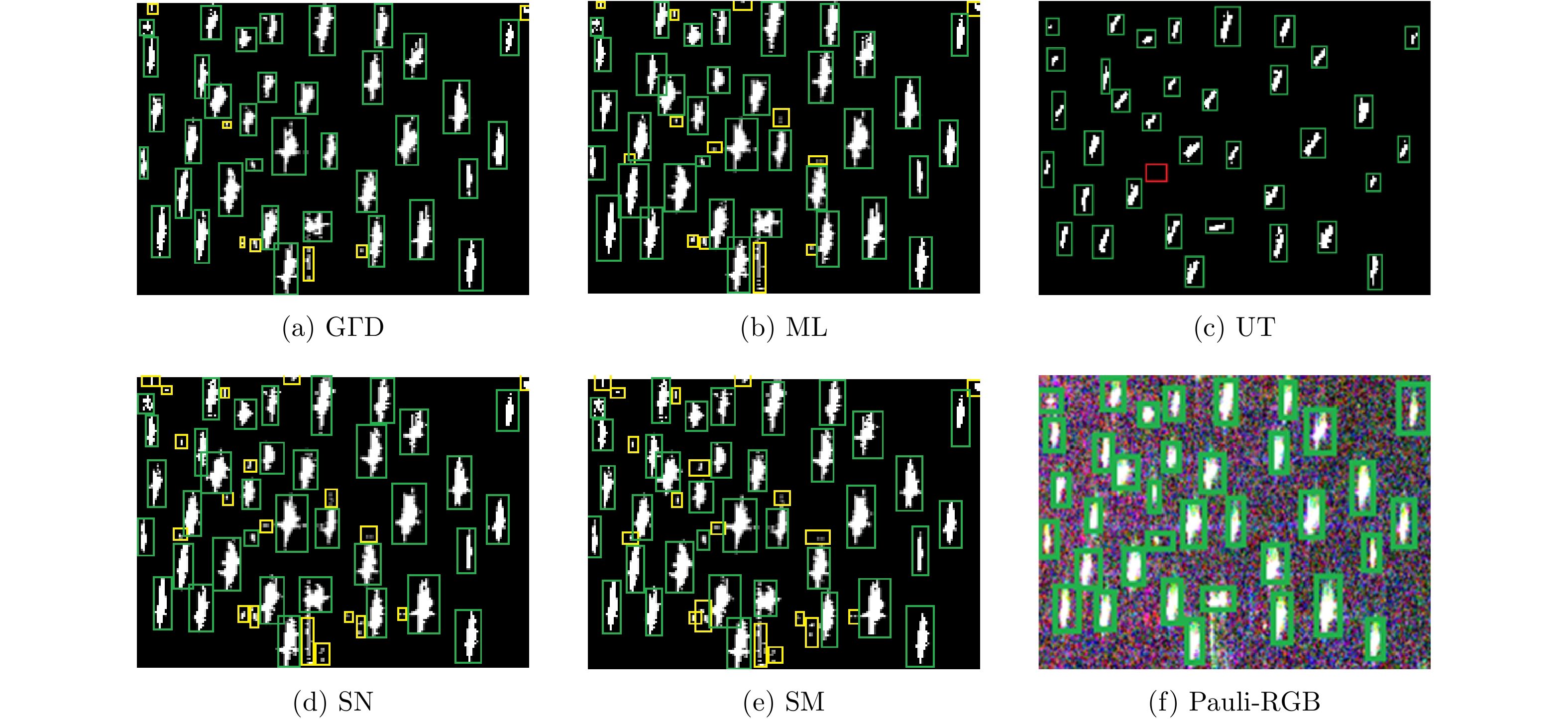
图 9 Moving target detection results in different polarimetric channels in PolSAR images[69]

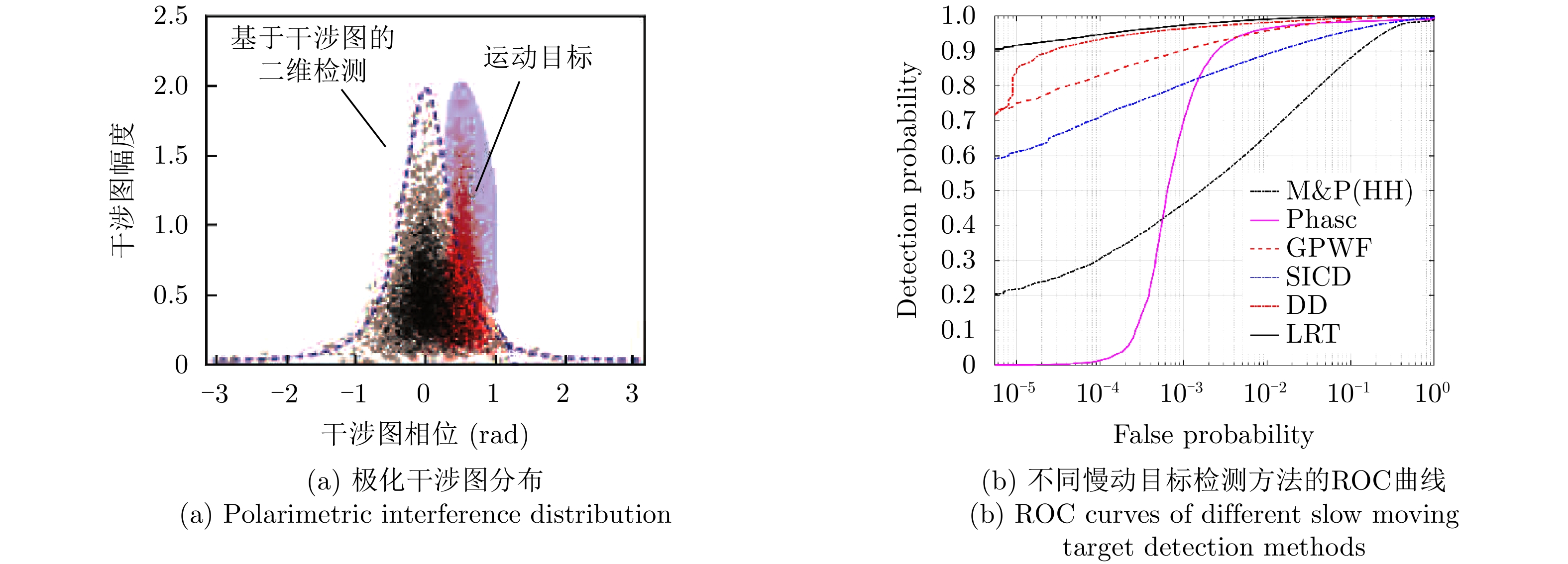
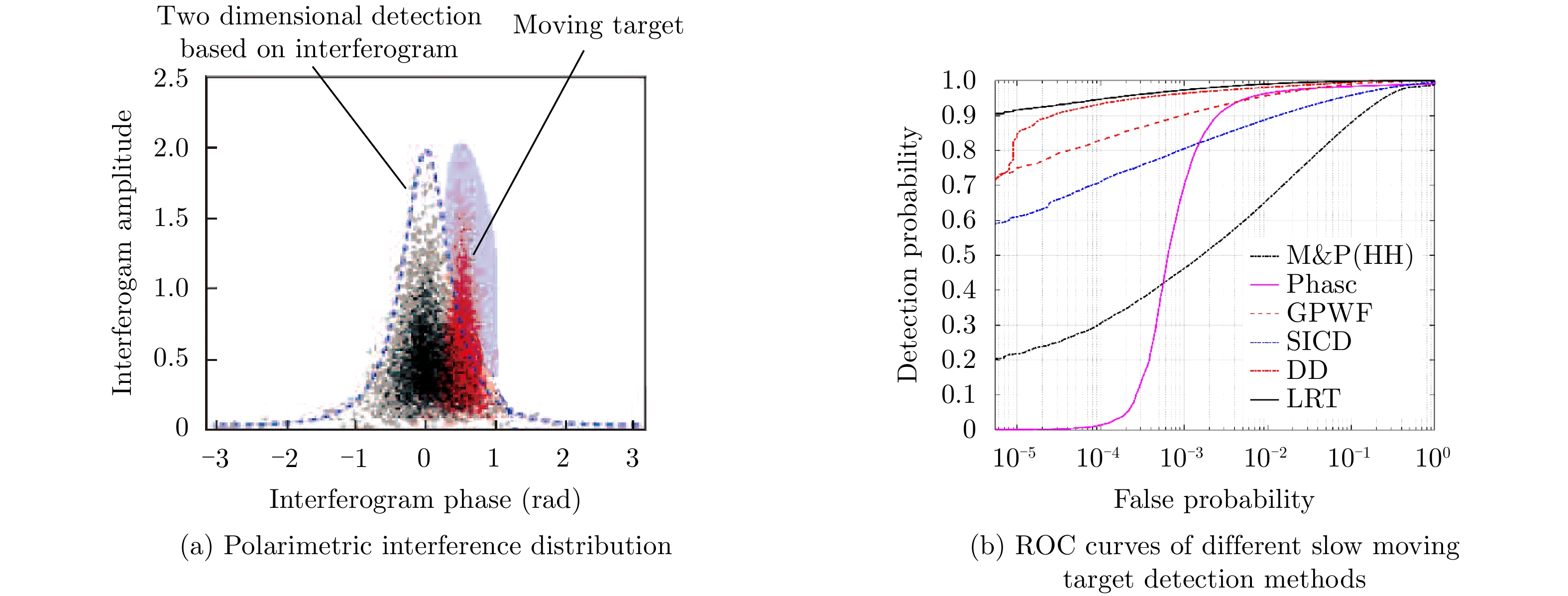
图 10 Simulation results of polarimetric along-track interferometry moving target detection[76]

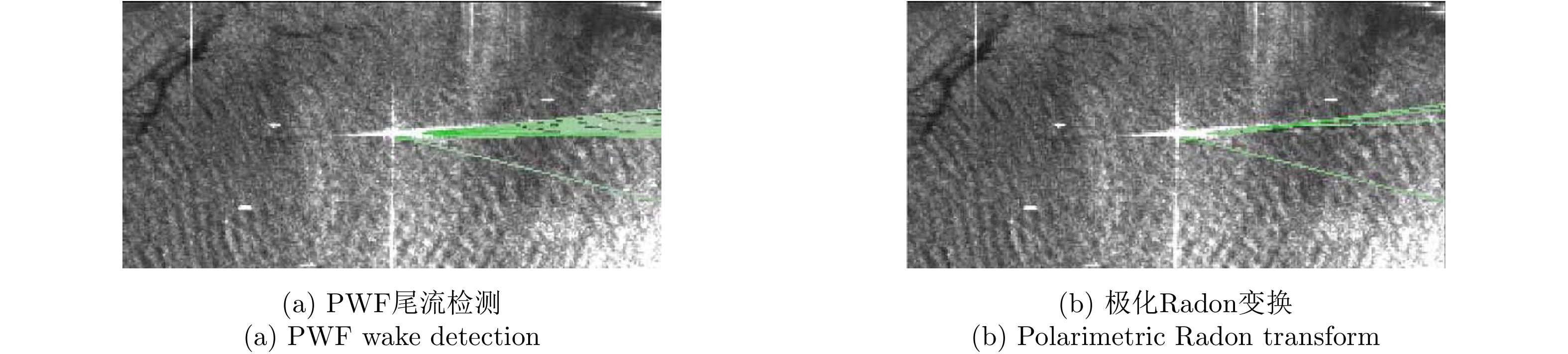
图 12 Ship wake detection results of low-rank and sparse decomposition combined with polarization[98]
表 1 PolSAR图像舰船目标检测方法适用场景和优缺点总结
Table 1. Applicable scenarios and pros & cons summary of PolSAR ship detection methods
检测分类 适用场景 具体检测方法 优点 缺点 目标极化特征检测 主要适用于舰船目标本体极化特征和杂波特征有一定差异情形下的检测 简单极化合成检测技术 早期PolSAR目标检测方法,简单易实现且效果优于单极化SAR图像目标检测方法 一定程度上利用了幅度或相位信息,对极化信息的利用不够充分 基于极化最优化的检测技术 1. 充分利用了各极化通道相关信息
2. 通过对PolSAR图像进行优化,达到最佳对比效果要根据实际情况选择不同的极化优化准则,同时滑窗的选择也对性能影响较大 基于散射机理的检测技术 具有较强的物理可解释性 对目标类型和海况状态的适应性需要提高 基于空间邻域的检测技术 融合空域与极化信息,大幅增强目标检测能力 后期数据处理需要降维以避免维数灾难 慢速运动目标检测 主要适用于目标杂波极化特征差异较小但有一定速度差异的情形,同时也能提取目标运动信息以获取实时海面态势 单通道慢动目标检测 利用交叉极化信息增强慢动目标的检测效果 静止目标模糊抑制和慢动目标检测难以同时实现 虚拟干涉慢动目标检测 解决了实际干涉数据来源缺乏的问题 子孔径分解的个数与重叠度的选择较为困难 多通道慢动目标检测 融合多平台和极化信息的优势,极大增强运动目标检测能力 复杂结构和成本限制工程应用 舰船目标尾迹检测 不是检测舰船目标本体,而是检测运动产生的尾迹,主要针对小目标和
隐身目标尾迹边缘线性特征检测 检测问题抽象成线形特征检测问题,方法相对简单 杂波背景下不同类型弱尾迹的检测困难 尾迹区域背景差异检测 尾迹区域和背景海面由于散射机理不同,在频谱特性、统计特征、极化特性等方面均存在较大差异,效果好 理论分析和方法实现更加复杂 基于深度学习的目标检测 不需要人工提取目标特征,在PolSAR图像智能解译中取得了巨大成功 基于卷积神经网络的检测方法 结构灵活、能够自动提取结构化特征,不仅能提取图像的低维特征,而且能提取图像的高维特征 1. 需要大量样本进行训练
2. 可解释性有待研究 下载: 导出CSV
下载: 导出CSV
表 1 Applicable scenarios and pros & cons summary of PolSAR ship detection methods
Detection method Advantage Disadvantage Target polarimetric characteristic detection method (mainly applied to the detection of ship and clutter when the polarimetric characteri
stics are different)Simple polarimetric channel
synthesis technologyThe early PolSAR target dete
ction method is simple and easy to realize, and the effect is better than the single PolSAR image target detection methodTo some extent, the amplitude or phase information is used, but the polarimetric information is not fully utilized Polarimetric optimization
detection technology1. The information of each polari
metric channel is fully utilized
2. PolSAR images are optimized to achieve the best contrast effectDifferent optimization criteria should be selected according to the actual situation, and the selection of a sliding window also has a significant influence on the performance Detection technology based on the
scattering mechanismIt has strong physical interpre
tabilityAdaptability to target types and sea state needs to be improved Spatial neighborhood detection
methodThe fusion of spatial and polarime
tric information considerably enhances the target detection capabilityDimensions need to be reduced to avoid a dimensional disaster Slow-moving target detection method (mainly applied to the situation where the polarimetric characteristic difference between target and clutter is small but thesre is a certain velocity diffe
rence; simultaneously, it can also extract the target motion informa
tion to obtain the real-time sea surface situation)Single-channel PolSAR-GMTI Cross-polarimetric information is used to enhance the detection effect of slow-moving targets Suppression of stationary targets and detection of slow-moving targets are difficult to achieve simultaneously Virtual interferometric
slow-moving target detectionThe problem of the lack of actual interference data source is solved It is difficult to choose the number of subaperture decompo
sition and overlap degreeMultichannel PolSAR-GMTI Integrating the advantages of multi-platform and polarization information considerably enhan
ces the ability to move target detectionComplex structure and cost limit engineering applications Ship wake detection method (it is used not to detect the ship target body but to detect the wake gene
rated by the movement, mainly for small targets and stealth targets)Linear feature detection of
wake edgeThe detection problem is abstrac
ted into the linear feature detec
tion problem, and the method is relatively simpleIt is difficult to detect different types of weak wakes in the cluttered background Background difference detection
in the wake regionDue to the different scattering mechanisms of the wake region and background sea surface, there are considerable differences in spectrum characteristics, statisti
cal characteristics, polarimetric characteristics, and other aspects, and the effect is goodThe theoretical analysis and method implementation are more complex Target detection algorithm based on deep learning (it has achieved great success in intelligent PolSAR image interpretation without extracting target features man
ually)Detection method based on CNN Flexible structure can automa
tically extract structured features,
including both low-dimensional and high-dimensional features of images1. It needs a large number of samples to train with
2. Interpretability needs to be investigated
下载: 导出CSV
-
[1] CRISP D J. The state-of-the-art in ship detection in synthetic aperture radar imagery[R]. DSTO-RR-0272, 2004. [2] RANSON K J and SUN Guoqing. An evaluation of AIRSAR and SIR-C/X-SAR images for mapping northern forest attributes in Maine, USA[J]. Remote Sensing of Environment, 1997, 59(2): 203–222. doi: 10.1016/S0034-4257(96)00154-X [3] 代大海, 王雪松, 肖顺平, 等. PolSAR系统与技术的发展趋势[J]. 雷达科学与技术, 2008, 6(1): 15–22. doi: 10.3969/j.issn.1672-2337.2008.01.003DAI Dahai, WANG Xuesong, and XIAO Shunping, et al. Development trend of PolSAR system and technology[J]. Radar Science and Technology, 2008, 6(1): 15–22. doi: 10.3969/j.issn.1672-2337.2008.01.003 [4] 匡纲要, 陈强, 蒋咏梅, 等. 极化合成孔径雷达基础理论及其应用[M]. 长沙: 国防科技大学出版社, 2011.KUANG Gangyao, CHEN Qiang, JIANG Yongmei, et al. Polarimetric Synthetic Aperture Radar Basic Principles and Its Applications[M]. Changsha: University of Defense Science and Technology Press, 2011. [5] 刘涛, 崔浩贵, 谢恺, 等. 极化合成孔径雷达图像解译技术[M]. 北京: 国防工业出版社, 2017.LIU Tao, CUI Haogui, XIE Kai, et al. Interpretation Techniques in Polarimetic Synthetic Apture Radar Imagery[M]. Beijing: National Defense Industry Press, 2017. [6] MARINO A, CLOUDE S R, and WOODHOUSE I H. Detecting depolarized targets using a new geometrical perturbation filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(10): 3787–3799. doi: 10.1109/TGRS.2012.2185703 [7] LIU Tao, YANG Ziyuan, MARINO A, et al. PolSAR ship detection based on neighborhood polarimetric covariance matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, in press. doi: 10.1109/TGRS.2020.3022181 [8] LIU Tao, YANG Ziyuan, ZHANG Tao, et al. A new form of the polarimetric notch filter[J]. IEEE Geoscience and Remote Sensing Letters, 2020, in press. doi: 10.1109/LGRS.2020.3020052 [9] SCIOTTI M, PASTINA D, and LOMBARDO P. Polarimetric detectors of extended targets for ship detection in SAR images[C]. IEEE 2001 International Geoscience and Remote Sensing Symposium Scanning the Present and Resolving the Future, Sydney, Australia, 2001. [10] 张鹏, 张嘉峰, 刘涛. 雷达多视极化检测器性能对比分析[J]. 电波科学学报, 2017, 32(4): 416–426. doi: 10.13443/j.cjors.2017022401ZHANG Peng, ZHANG Jiafeng, and LIU Tao. Contrastive analysis of the performances of radar multi-look polarimetric detectors[J]. Chinese Journal of Radio Science, 2017, 32(4): 416–426. doi: 10.13443/j.cjors.2017022401 [11] BOERNER W M, KOSTINSKI A B, and JAMES B D. On the concept of the polarimetric matched filter in high resolution radar imaging: An alternative for speckle reduction[C]. International Geoscience and Remote Sensing Symposium, ‘Remote Sensing: Moving Toward the 21st Century’, Edinburgh, UK, 1988: 69–72. [12] NOVAK L M, SECHTIN M B, and CARDULLO M J. Studies of target detection algorithms that use polarimetric radar data[J]. IEEE Transactions on Aerospace and Electronic Systems, 1989, 25(2): 150–165. doi: 10.1109/7.18677 [13] CHANEY R D, BUD M C, and NOVAK L M. On the performance of polarimetric target detection algorithms[J]. IEEE Aerospace and Electronic Systems Magazine, 1990, 5(11): 10–15. doi: 10.1109/62.63157 [14] NOVAK L M and BURL M C. Optimal speckle reduction in polarimetric SAR imagery[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990, 26(2): 293–305. doi: 10.1109/7.53442 [15] YANG Jian, YAMAGUCHI Y, BOERNER W M, et al. Numerical methods for solving the optimal problem of contrast enhancement[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(2): 965–971. doi: 10.1109/36.84197 [16] YANG Dongwen, DU Lan, LIU Hongwei, et al. Novel polarimetric contrast enhancement method based on minimal clutter to signal ratio subspace[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(11): 8570–8583. doi: 10.1109/TGRS.2019.2921629 [17] NOVAK L M. Target detection studies using fully polarimetric data collected by the Lincoln Laboratory MMW SAR[C]. 92 International Conference on Radar, Brighton, UK, 1992. [18] LIU Tao, YANG Ziyuan, YANG Jian, et al. CFAR ship detection methods using compact polarimetric SAR in a K-Wishart distribution[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(10): 3737–3745. doi: 10.1109/JSTARS.2019.2923009 [19] LOPES A and SERY F. Optimal speckle reduction for the product model in multilook polarimetric SAR imagery and the Wishart distribution[J]. IEEE Transactions on Geoscience and Remote Sensing, 1997, 35(3): 632–647. doi: 10.1109/36.581979 [20] LIU Guoqing, HUANG Shunji, TORRE A, et al. The multilook polarimetric whitening filter (MPWF) for intensity speckle reduction in polarimetric SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 1016–1020. doi: 10.1109/36.673694 [21] LIU Tao, ZHANG Jiafeng, GAO Gui, et al. CFAR ship detection in polarimetric synthetic aperture radar images based on whitening filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 58(1): 58–81. doi: 10.1109/TGRS.2019.2931353 [22] GAO Gui, LI Gaosheng, and LI Yipeng. Shape parameter estimator of the generalized Gaussian distribution based on the MoLC[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 350–354. doi: 10.1109/LGRS.2017.2787558 [23] GAO Gui, OUYANG Kewei, LUO Yongbo, et al. Scheme of parameter estimation for generalized gamma distribution and its application to ship detection in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(3): 1812–1832. doi: 10.1109/TGRS.2016.2634862 [24] GAO Gui, LUO Yongbo, OUYANG Kewei, et al. Statistical modeling of PMA detector for ship detection in high-resolution dual-polarization SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(7): 4302–4313. doi: 10.1109/TGRS.2016.2539200 [25] GAO Gui, WANG Xiaoyang, and NIU Min. Statistical modeling of the reflection symmetry metric for sea clutter in dual-polarimetric SAR data[J]. IEEE Journal of Oceanic Engineering, 2016, 41(2): 339–345. doi: 10.1109/JOE.2015.2458231 [26] 冷祥光, 计科峰, 熊博莅, 等. 面向舰船目标检测的单通道复值SAR图像统计建模方法研究[J]. 雷达学报, 2020, 9(3): 477–496. doi: 10.12000/JR20070LENG Xiangguang, JI Kefeng, XIONG Boli, et al. Statistical modeling methods of single-channel complex-valued SAR images for ship detection[J]. Journal of Radars, 2020, 9(3): 477–496. doi: 10.12000/JR20070 [27] TAO Ding, ANFINSEN S N, and BREKKE C. Robust CFAR detector based on truncated statistics in multiple-target situations[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(1): 117–134. doi: 10.1109/TGRS.2015.2451311 [28] LIU Tao, YANG Ziyuan, MARINO A, et al. Robust CFAR detector based on truncated statistics for polarimetric synthetic aperture radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(9): 6731–6747. doi: 10.1109/TGRS.2020.2979252 [29] LANG Haitao, XI Yuyang, and ZHANG Xi. Ship detection in high-resolution SAR images by clustering spatially enhanced pixel descriptor[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(8): 5407–5423. doi: 10.1109/TGRS.2019.2899337 [30] NUNZIATA F, MIGLIACCIO M, and BROWN C E. Reflection symmetry for polarimetric observation of man-made metallic targets at sea[J]. IEEE Journal of Oceanic Engineering, 2012, 37(3): 384–394. doi: 10.1109/JOE.2012.2198931 [31] WANG Na, SHI Gongtao, LIU Li, et al. Polarimetric SAR target detection using the reflection symmetry[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(6): 1104–1108. doi: 10.1109/LGRS.2012.2189548 [32] MARINO A. A notch filter for ship detection with polarimetric SAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(3): 1219–1232. doi: 10.1109/JSTARS.2013.2247741 [33] MARINO A and HAJNSEK I. Statistical tests for a ship detector based on the polarimetric notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(8): 4578–4595. doi: 10.1109/TGRS.2015.2402312 [34] GAO Gui and SHI Gongtao. CFAR ship detection in nonhomogeneous sea clutter using polarimetric SAR data based on the notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(8): 4811–4824. doi: 10.1109/TGRS.2017.2701813 [35] GAO Gui and SHI Gongtao. Ship detection in dual-channel ATI-SAR based on the notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(8): 4795–4810. doi: 10.1109/TGRS.2017.2701810 [36] GAO Gui, GAO Sheng, HE Juan, et al. Ship detection using compact polarimetric SAR based on the notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(9): 5380–5393. doi: 10.1109/TGRS.2018.2815582 [37] CLOUDE S R and POTTIER E. A review of target decomposition theorems in radar polarimetry[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(2): 498–518. doi: 10.1109/36.485127 [38] RINGROSE R and HARRIS N. Ship detection using polarimetric SAR data[J]. European Space Agency ESA SP, 2000, 450(450): 687. [39] TOUZI R, CHARBONNEAU F, HAWKINS R K, et al. Ship-sea contrast optimization when using polarimetric SARs[C]. IEEE 2001 International Geoscience and Remote Sensing Symposium Scanning the Present and Resolving the Future, Sydney, Australia, 2001. [40] TOUZI R. Calibrated polarimetric SAR data for ship detection[C]. IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No. 00CH37120), Honolulu, USA, 2000. [41] CHEN Jiong, CHEN Yilun, and YANG Jian. Ship detection using polarization cross-entropy[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(4): 723–727. doi: 10.1109/LGRS.2009.2024224 [42] SUGIMOTO M, OUCHI K, and NAKAMURA Y. On the novel use of model-based decomposition in SAR polarimetry for target detection on the sea[J]. Remote Sensing Letters, 2013, 4(9): 843–852. doi: 10.1080/2150704X.2013.804220 [43] YANG Jian, DONG Guiwei, PENG Yingning, et al. Generalized optimization of polarimetric contrast enhancement[C]. IEEE Antennas and Propagation Society International Symposium. Digest. Held in conjunction with: USNC/CNC/URSI North American Radio Sci. Meeting (Cat. No. 03CH37450), Columbus, USA, 2003. [44] YIN Junjun, YANG Jian, XIE Chunhua, et al. An improved generalized optimization of polarimetric contrast enhancement and its application to ship detection[J]. IEICE Transactions on Communications, 2013, E96.B(7): 2005–2013. doi: 10.1587/transcom.E96.B.2005 [45] TOUZI R, HURLEY J, and VACHON P W. Optimization of the degree of polarization for enhanced ship detection using polarimetric RADARSAT-2[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(10): 5403–5424. doi: 10.1109/TGRS.2015.2422134 [46] BORDBARI R and MAGHSOUDI Y. A new target detector based on subspace projections using polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 3025–3039. doi: 10.1109/TGRS.2018.2879681 [47] 殷君君, 安文韬, 杨健. 基于极化散射参数与Fisher-OPCE的监督目标分类[J]. 清华大学学报: 自然科学版, 2011, 51(12): 1782–1786.YIN Junjun, AN Wentao, and YANG Jian. Supervised target classification using polarimetric scattering parameters and Fisher-OPCE[J]. Journal of Tsinghua University:Science and Technology, 2011, 51(12): 1782–1786. [48] CUI Xingchao, CHEN Siwei, and SU Yi. Ship detection in polarimetric SAR image based on similarity test[C]. 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019. doi: 10.1109/IGARSS.2019.8900480. [49] HE Jinglu, WANG Yinghua, LIU Hongwei, et al. A novel automatic PolSAR ship detection method based on superpixel-level local information measurement[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 384–388. doi: 10.1109/LGRS.2017.2789204 [50] LANG Haitao, TAO Yunhong, NIU Lihui, et al. A new scattering similarity based metric for ship detection in polarimetric synthetic aperture radar image[J]. Acta Oceanologica Sinica, 2020, 39(5): 145–150. doi: 10.1007/s13131-020-1563-7 [51] CUI Xingchao, SU Yi, and CHEN Siwei. A saliency detector for polarimetric SAR ship detection using similarity test[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(9): 3423–3433. doi: 10.1109/JSTARS.2019.2925833 [52] HUANG Xiaojing, HUANG Pingping, DONG Lixia, et al. Saliency detection based on distance between patches in polarimetric SAR images[C]. 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, Canada, 2014. [53] JÄGER M and HELLWICH O. Saliency and salient region detection in SAR polarimetry[C]. 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, South Korea, 2005. [54] WANG Haipeng, XU Feng, and CHEN Shanshan. Saliency detector for SAR images based on pattern recurrence[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(7): 2891–2900. doi: 10.1109/JSTARS.2016.2521709 [55] LIN Huiping, CHEN Hang, JIN Kan, et al. Ship detection with superpixel-level fisher vector in high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(2): 247–251. doi: 10.1109/LGRS.2019.2920668 [56] ZHANG Tao, JI Jinsheng, LI Xiaofeng, et al. Ship detection from PolSAR imagery using the complete polarimetric covariance difference matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 57(5): 2824–2839. doi: 10.1109/TGRS.2018.2877821 [57] ZHANG Tao, YANG Zhen, GAN Hongping, et al. PolSAR ship detection using the joint polarimetric information[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(11): 8225–8241. doi: 10.1109/TGRS.2020.2989425 [58] PERRY R P, DIPIETRO R C, and FANTE R L. SAR imaging of moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 188–200. doi: 10.1109/7.745691 [59] GAO Gui, WANG Xiaoyang, and LAI Tao. Detection of moving ships based on a combination of magnitude and phase in along-track interferometric SAR—Part II: Statistical modeling and CFAR detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(7): 3582–3599. doi: 10.1109/TGRS.2014.2379351 [60] GAO Gui, WANG Xiaoyang, and LAI Tao. Detection of moving ships based on a combination of magnitude and phase in along-track interferometric SAR—Part I: SIMP metric and its performance[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(7): 3565–3581. doi: 10.1109/TGRS.2014.2379352 [61] GAO Gui and SHI Gongtao. The CFAR detection of ground moving targets based on a joint metric of SAR interferogram’s magnitude and phase[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(9): 3618–3624. doi: 10.1109/TGRS.2012.2184836 [62] PARK H R, LI Jian, and WANG Hong. Polarization-space-time domain generalized likelihood ratio detection of radar targets[J]. Signal Processing, 1995, 41(2): 153–164. doi: 10.1016/0165-1684(94)00097-J [63] PARK H R, KWAG Y K, and WANG Hong. An efficient adaptive polarimetric processor with an embedded CFAR[J]. ETRI Journal, 2003, 25(3): 171–178. doi: 10.4218/etrij.03.0102.0316 [64] WANG Genyuan, XIA Xianggen, and CHEN V C. Radar imaging of moving targets in foliage using multifrequency multiaperture polarimetric SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(8): 1755–1764. doi: 10.1109/TGRS.2003.813501 [65] FRIEDLANDER B and PORAT B. VSAR: A high resolution radar system for detection of moving targets[J]. IEE Proceedings-Radar,Sonar and Navigation, 1997, 144(4): 205–218. doi: 10.1049/ip-rsn:19971309 [66] LIU Zhongxun, DAI Dahai, LI Dun, et al. Optimal polarimetric interferometry coherence analysis in detection and location of moving target with SAR[C]. The 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 2007. [67] MATTAR K E, LIU Chen, and SABRY R. Polarimetric SAR interferometry: Investigations using EC CV-580 SAR data[R]. Ottawa: Defence Research and Development Canada Ottawa, 2005. [68] ZOU Bin, WEI Tao, and ZHANG Lamei. Moving targets detection and analysis on multi-look polarimetric SAR images using PWF method[C]. 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, USA, 2008. [69] LIU Chen and GIERULL C H. A new application for polsar imagery in the field of moving target indication/ship detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(11): 3426–3436. doi: 10.1109/TGRS.2007.907192 [70] LIU Chen. Time-frequency analysis of PolSAR moving target data[J]. Canadian Journal of Remote Sensing, 2007, 33(4): 237–249. doi: 10.5589/m07-019 [71] STACY N and PREISS M. Polarimetric ATI slow target detection in a log likelihood framework[C]. 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 2013. [72] 李延伟. 单/双基地极化干涉SAR信号建模、检测及参数反演方法研究[D]. [博士论文], 国防科学技术大学, 2010.LI Yanwei. Study on the method of the modeling, the detection and the parameter inversion for the mono/bi static polarimetric SAR interferometry[D]. [Ph. D. dissertation], National University of Defense Technology, 2010. [73] CHIU S, GIERULL C, and RASHID M. First results of experimental polarimetric SAR-GMTI modes on RADARSAT-2[C]. 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018. [74] CHIU S, GIERULL C, and RASHID M. Ship detection, discrimination, and motion estimation via spaceborne polarimetric SAR-GMTI[C]. 2019 IEEE Radar Conference, Boston, USA, 2019. [75] ZHANG Peng, ZHANG Jiafeng, and LIU Tao. Constant false alarm rate detection of slow targets in polarimetric along-track interferometric synthetic aperture radar imagery[J]. IET Radar,Sonar&Navigation, 2019, 13(1): 31–44. doi: 10.1049/iet-rsn.2018.5082 [76] 张鹏, 张嘉峰, 刘涛. 基于相干度优化的极化顺轨干涉SAR慢小目标CFAR检测[J]. 北京航空航天大学学报, 2019, 45(3): 575–587. doi: 10.13700/j.bh.1001-5965.2018.0322ZHANG Peng, ZHANG Jiafeng, and LIU Tao. Slow and small target CFAR detection of polarimetric along-track interferometric SAR using coherence optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3): 575–587. doi: 10.13700/j.bh.1001-5965.2018.0322 [77] OUCHI K. On the multilook images of moving targets by synthetic aperture radars[J]. IEEE Transactions on Antennas and Propagation, 1985, 33(8): 823–827. doi: 10.1109/TAP.1985.1143684 [78] KIRSCHT M. Detection and velocity estimation of moving objects in a sequence of single-look SAR images[C]. 1996 International Geoscience and Remote Sensing Symposium, Lincoln, USA, 1996. [79] GAO Fei, MAO Shiyi, SUN Jinping, et al. A tri-look detector for single channel SAR-GMTI[C]. 2009 IET International Radar Conference, Guilin, China, 2009. [80] 康雪艳, 杨汝良. 利用DPCA方法对机载单天线SAR实际数据进行动目标检测[J]. 遥感技术与应用, 2004, 19(3): 182–186. doi: 10.3969/j.issn.1004-0323.2004.03.009KANG Xueyan and YANG Ruliang. Moving targets detection using DPCA Method for single-antenna airborne SAR real data[J]. Remote Sensing Technology and Application, 2004, 19(3): 182–186. doi: 10.3969/j.issn.1004-0323.2004.03.009 [81] 张露, 郭华东, 韩春明, 等. 基于子孔径分解的SAR动目标检测方法[J]. 电子学报, 2008, 36(6): 1210–1213. doi: 10.3321/j.issn:0372-2112.2008.06.034ZHANG Lu, GUO Huadong, HAN Chunming, et al. Moving targets detection in SAR images based on sub-aperture decomposition[J]. Acta Electronica Sinica, 2008, 36(6): 1210–1213. doi: 10.3321/j.issn:0372-2112.2008.06.034 [82] 康雪艳, 杨汝良. 对机载单天线SAR实际数据进行ATI动目标检测的新方法[J]. 电子学报, 2005, 33(3): 416–418. doi: 10.3321/j.issn:0372-2112.2005.03.008KANG Xueyan and YANG Ruliang. A new method of moving target detection using ATI for single-antenna airborne SAR real data[J]. Acta Electronica Sinica, 2005, 33(3): 416–418. doi: 10.3321/j.issn:0372-2112.2005.03.008 [83] MARINO A, SANJUAN-FERRER M J, HAJNSEK I, et al. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms[J]. Remote Sensing, 2015, 7(5): 5416–5439. doi: 10.3390/rs70505416 [84] 种劲松, 朱敏慧. SAR图像舰船及其尾迹检测研究综述[J]. 电子学报, 2003, 31(9): 1356–1360. doi: 10.3321/j.issn:0372-2112.2003.09.020CHONG Jinsong and ZHU Minhui. Survey of the study on ship and wake detection in SAR imagery[J]. Acta Electronica Sinica, 2003, 31(9): 1356–1360. doi: 10.3321/j.issn:0372-2112.2003.09.020 [85] SCHULER D L, LEE J S, HOPPEL K, et al. Polarimetric sar image signatures of gulf-stream features and ship wakes[C]. 1992 International Geoscience and Remote Sensing Symposium, Houston, USA, 1992. [86] POTTIER E, BOERNER W M, and SCHULER D L. Polarimetric detection and estimation of ship wakes[C]. IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 1999. [87] WU Peng, WANG Jun, WANG Wenguang, et al. Polarimetric characters extraction research of Kelvin wakes on PolSAR image[C]. 2011 International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 2011. [88] HENNINGS I, ROMEISER R, ALPERS W, et al. Radar imaging of Kelvin arms of ship wakes[J]. International Journal of Remote Sensing, 1999, 20(13): 2519–2543. doi: 10.1080/014311699211912 [89] 叶文隽. SAR图像舰船尾迹检测研究[D]. [硕士论文], 国防科学技术大学, 2009.YE Wenjun. Research on detection of ship wake from SAR imagery[D]. [Master dissertation], National University of Defense Technology, 2009. [90] IMBO P, SOUYRIS J C, and YEREMY M. Wake detection in polarimetric SAR images[C]. IEEE 2001 International Geoscience and Remote Sensing Symposium Scanning the Present and Resolving the Future, Sydney, Australia, 2001. [91] KASILINGAM D, SCHULER D, LEE J S, et al. Modulation of polarimetric coherence by ocean features[C]. 2002 IEEE International Geoscience and Remote Sensing Symposium, Toronto, Canada, 2002: 432–434. [92] MORRIS J, ANDERSON S, and PARFITT A. Polarimetric mapping of ship wakes[C]. 2002 IEEE International Geoscience and Remote Sensing Symposium, Toronto, Canada, 2002. [93] MORRIS J and ANDERSON S. An entropy-based approach to wake echo analysis [ship wake radar detection][C]. 2003 International Conference on Radar, Adelaide, Australia, 2003. [94] YANG Jingsong, HUANG Weigen, XIAO Qingmei, et al. Optimal polarization for the observation of ocean features with SAR[C]. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004. [95] ARNOLD-BOS A, MARTIN A, and KHENCHAF A. A versatile bistatic & polarimetric marine radar simulator[C]. 2006 IEEE Conference on Radar, Verona, USA, 2006. [96] XU Zhou, TANG Bo, and CHENG Shuiying. Faint ship wake detection in PolSAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(7): 1055–1059. doi: 10.1109/LGRS.2018.2823007 [97] BIONDI F. Low-rank plus sparse decomposition and localized radon transform for ship-wake detection in synthetic aperture radar images[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(1): 117–121. doi: 10.1109/LGRS.2017.2777264 [98] BIONDI F. A polarimetric extension of low-rank plus sparse decomposition and radon transform for ship wake detection in synthetic aperture radar images[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(1): 75–79. doi: 10.1109/LGRS.2018.2868365 [99] 徐丰, 王海鹏, 金亚秋, 等. 合成孔径雷达图像智能解译[M]. 北京: 科学出版社, 2020.XU Feng, WANG Haipeng, JIN Yaqiu, et al. Synthetic Aperture Radar Image Intelligent Interpretation[M]. Beijing: Science Press, 2020. [100] SAIN S R. The nature of statistical learning theory[J]. Technometrics, 1996, 38(4): 409. doi: 10.1080/00401706.1996.10484565 [101] 杜兰, 王兆成, 王燕, 等. 复杂场景下单通道SAR目标检测及鉴别研究进展综述[J]. 雷达学报, 2020, 9(1): 34–54. doi: 10.12000/JR19104DU Lan, WANG Zhaocheng, WANG Yan, et al. Survey of research progress on target detection and discrimination of single-channel SAR images for complex scenes[J]. Journal of Radars, 2020, 9(1): 34–54. doi: 10.12000/JR19104 [102] GAO Gui. A parzen-window-kernel-based CFAR algorithm for ship detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(3): 557–561. doi: 10.1109/LGRS.2010.2090492 [103] 张晓玲, 张天文, 师君, 等. 基于深度分离卷积神经网络的高速高精度SAR舰船检测[J]. 雷达学报, 2019, 8(6): 841–851. doi: 10.12000/JR19111ZHANG Xiaoling, ZHANG Tianwen, SHI Jun, et al. High-speed and high-accurate SAR ship detection based on a depthwise separable convolution neural network[J]. Journal of Radars, 2019, 8(6): 841–851. doi: 10.12000/JR19111 [104] CHEN Siwei, TAO Chensong, WANG Xuesong, et al. Polarimetric SAR targets detection and classification with deep convolutional neural network[C]. 2018 Progress in Electromagnetics Research Symposium, Toyama, Japan, 2018. [105] ZHOU Feng, FAN Weiwei, SHENG Qiangqiang, et al. Ship detection based on deep convolutional neural networks for polsar images[C]. 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018. [106] 鲁兵兵. 基于深度学习的PolSAR图像分类与舰船检测方法[D]. [硕士论文], 西安电子科技大学, 2019.LU Bingbing. PolSAR image classification and ship detection method based on deep learning[D]. [Master dissertation], Xidian University, 2019. [107] JIN Kan, CHEN Yilun, XU Bin, et al. A patch-to-pixel convolutional neural network for small ship detection with PolSAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(9): 6623–6638. doi: 10.1109/TGRS.2020.2978268 [108] COZZOLINO D, DI MARTINO G, POGGI G, et al. A fully convolutional neural network for low-complexity single-stage ship detection in sentinel-1 SAR images[C]. 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, USA, 2017: 886889. [109] 李其. 基于深度特征的SAR图像舰船目标检测方法研究[D]. [硕士论文], 电子科技大学, 2020.LI Qi. Research of ship detection in SAR images based on depth features[D]. [Master dissertation], University of Electronic Science and Technology of China, 2020. [110] FITCH J P, LEHMAN S K, DOWLA F U, et al. Ship wake-detection procedure using conjugate gradient trained artificial neural networks[J]. IEEE Transactions on Geoscience and Remote Sensing, 1991, 29(5): 718–726. doi: 10.1109/36.83986 [111] KANG K M and KIM D J. Ship velocity estimation from ship wakes detected using convolutional neural networks[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(11): 4379–4388. doi: 10.1109/JSTARS.2019.2949006 -

















计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

