
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Polarimetric SAR Ship Detection Based on Polarimetric Rotation Domain Features and Superpixel Technique
-
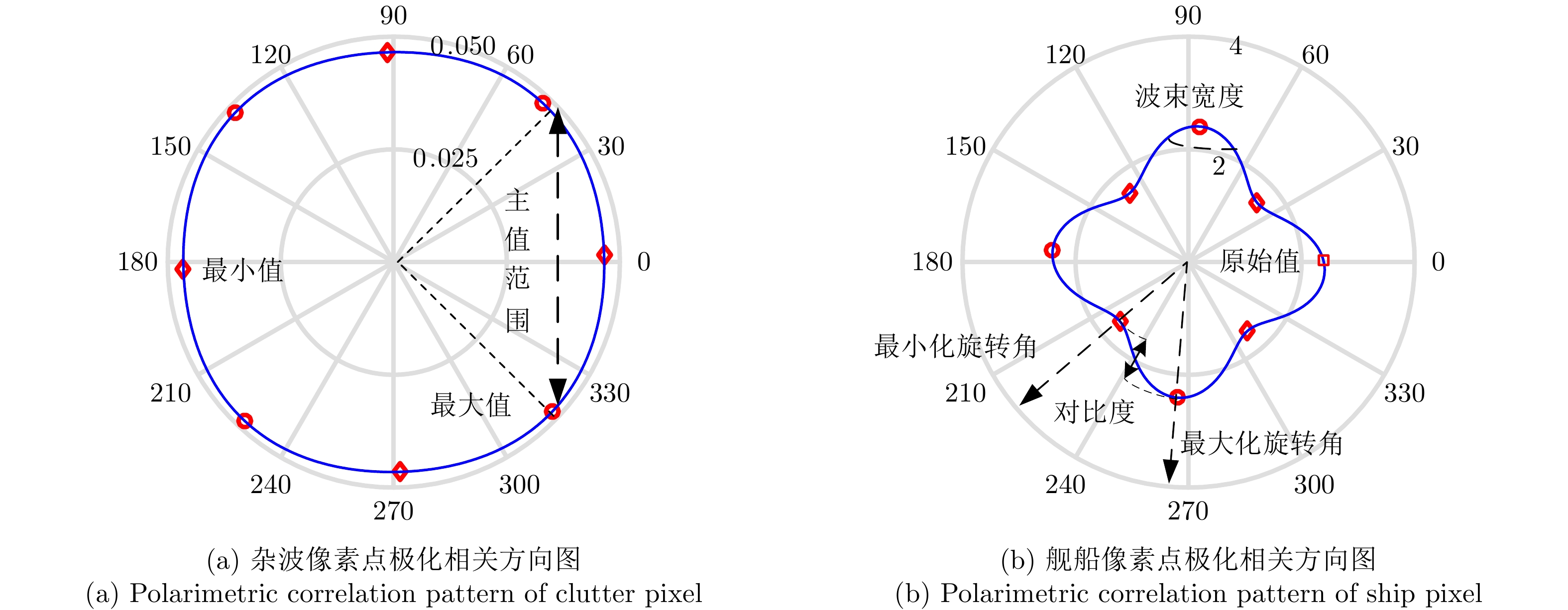
摘要: 对海监视是极化SAR的重要应用,密集区域的舰船目标检测是当前面临的主要挑战之一。舰船密集区域受多目标串扰,传统的恒虚警率(CFAR)检测滑窗难以选取纯净的海杂波样本用于确定检测门限,将导致检测性能下降。针对这一问题,该文从特征提取和检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法。在特征提取方面,雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,由此带来的散射多样性隐含信息可通过极化旋转域分析进行挖掘。该文利用极化相关方向图及导出的一系列极化旋转域特征,根据目标杂波比(TCR)分析,优选TCR最高的3个极化特征量用于构建目标检测器。在此基础上,该文在检测器设计方面提出了一种基于K均值聚类的杂波超像素筛选方法,有效避免了密集区域舰船目标对邻近杂波的影响,基于筛选的杂波像素点得到舰船目标CFAR检测结果。基于Radarsat-2和高分三号星载全极化SAR数据的对比实验表明,所提方法能有效实现密集区域舰船目标检测,检测品质因数达到95%。Abstract: Sea surveillance is an important application of polarimetric Synthetic Aperture Radar (SAR), but ship detection in dense areas remains a major challenge. Due to the crosstalk of multiple targets in dense ship areas, it can be difficult to collect pure sea clutter samples for threshold determination when using the traditional Constant False Alarm Rate (CFAR) moving window, which decreases the detection performance. To address this issue, in this paper, a polarimetric SAR ship detection method is proposed based on polarimetric rotation domain features and superpixel technique, with consideration of both feature selection and detector design. For feature selection, the backscattering of radar targets is sensitive to the relative geometry between the target orientations and the radar line of sight. The information hidden in this scattering diversity can be mined using polarimetric rotation domain analysis, from which the polarimetric correlation pattern and a set of polarimetric rotation domain features are obtained. Target-to-Clutter Ratio (TCR) analysis is conducted, and the three polarimetric features with the highest TCR values are selected for successive target detection. On this basis, a clutter superpixel selection method is developed for detector design based on K-means clustering, which effectively circumvents the influence of dense ship targets on near sea clutter. CFAR ship detection results can be obtained based on the selected clutter samples. Experimental studies on spaceborne Radarsat-2 and GaoFen-3 full polarimetric SAR datasets indicate that, the proposed method can effectively detect dense ship targets with 95% higher figures of merit.
-

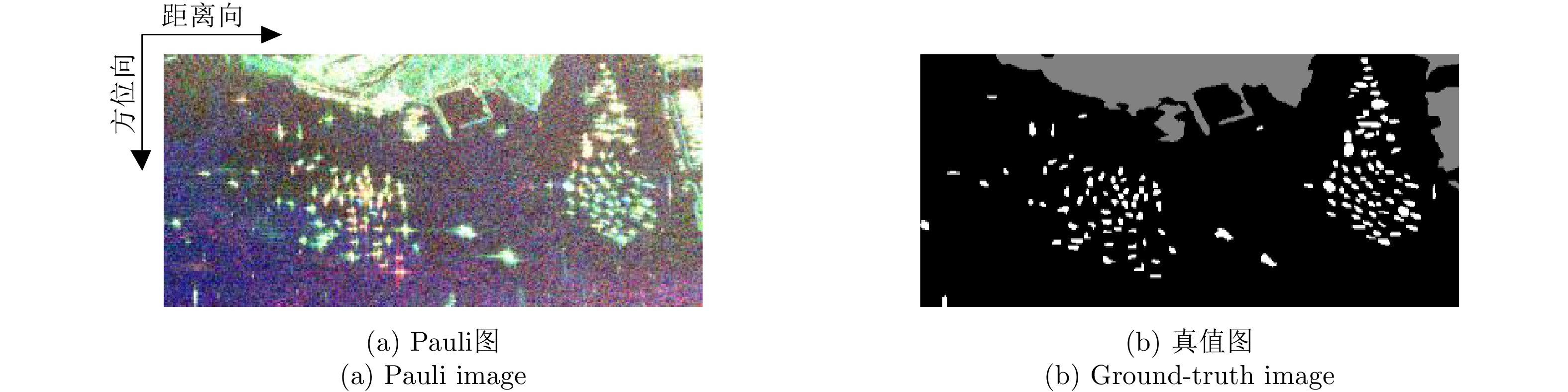
图 3 Radarsat-2数据及其超像素分割结果
Figure 3. Radarsat-2 data and its superpixel segmentation results

图 4 融合极化旋转域特征和超像素技术的舰船检测方法流程图
Figure 4. Flowchart of ship detection method combing polarimetric rotation domain features and superpixel technique
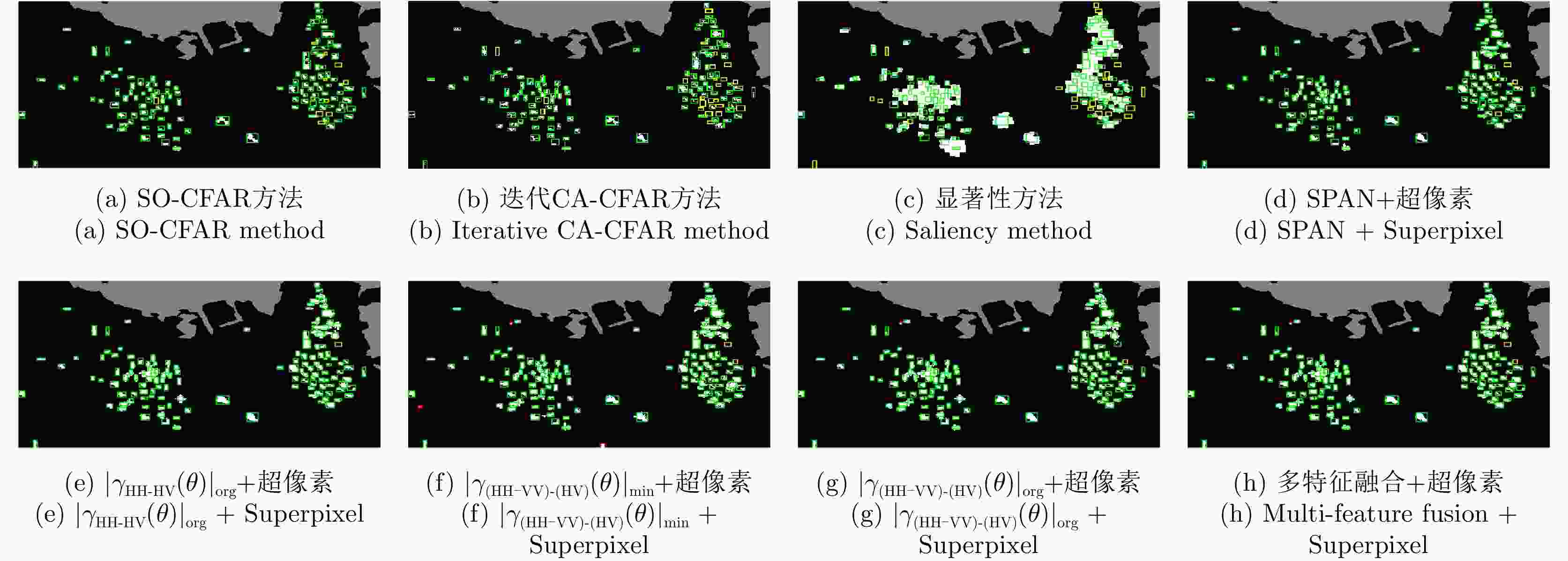
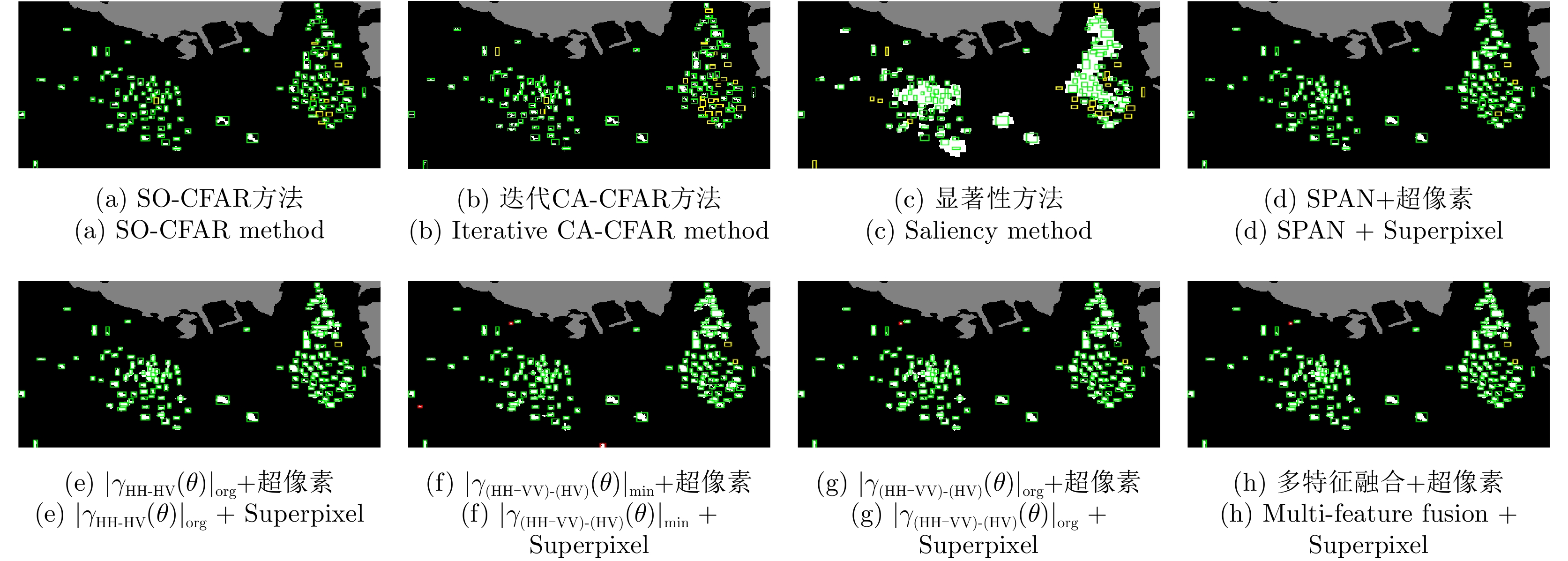
图 8 Radarsat-2数据对比方法检测结果
Figure 8. Detection results of comparative methods with Radarsat-2 data
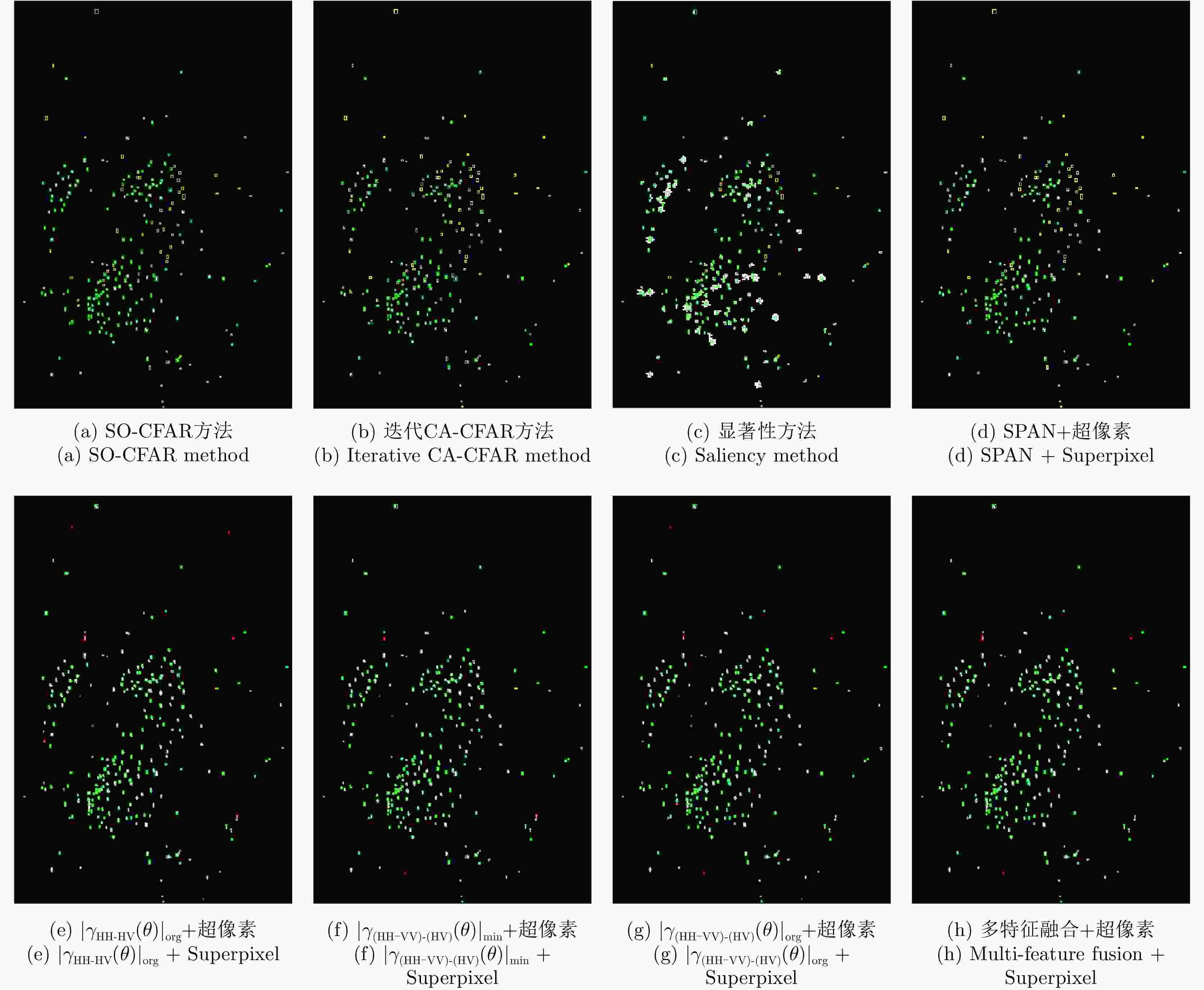
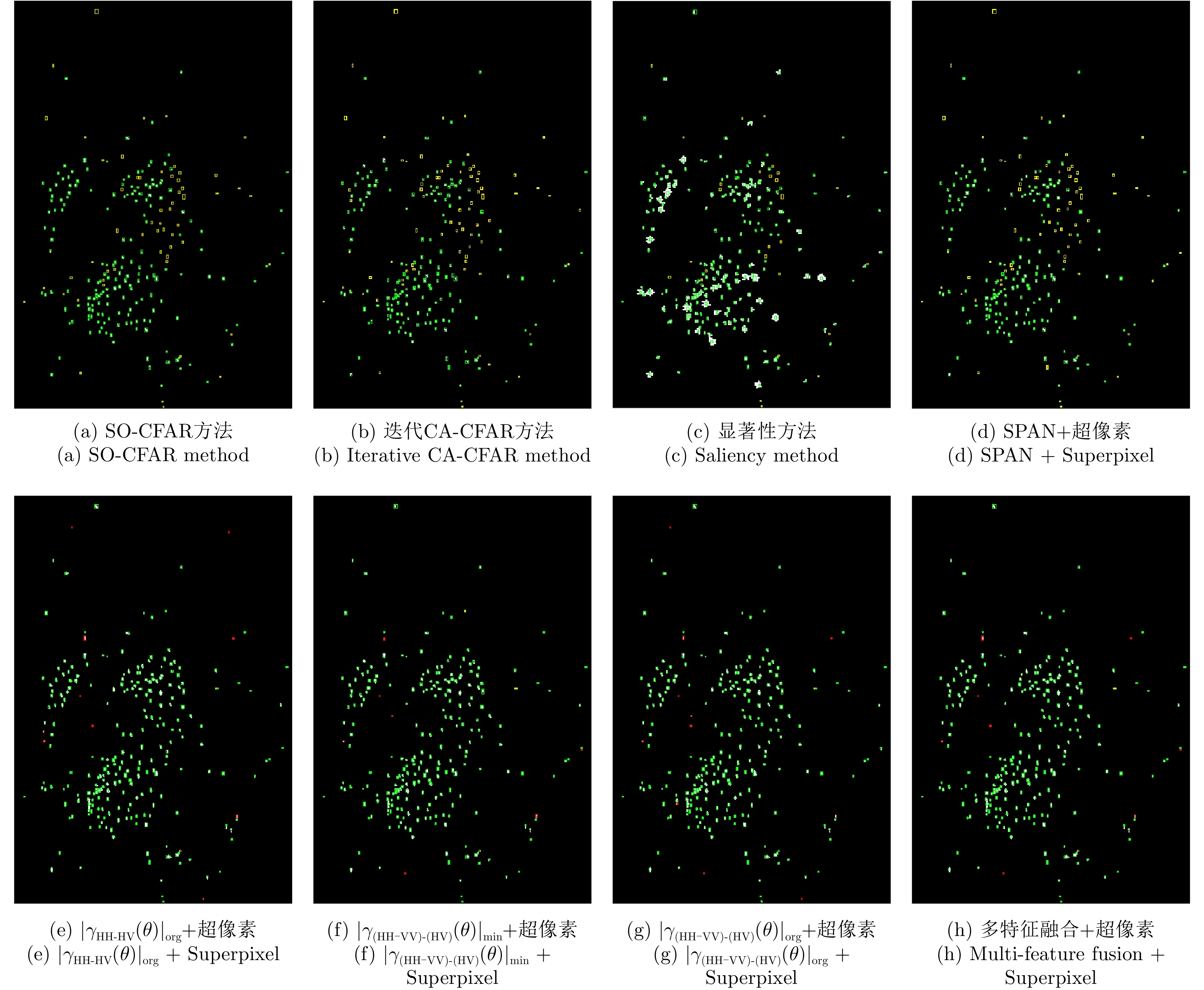
图 9 高分三号数据I对比方法检测结果
Figure 9. Detection results of comparative methods with GaoFen-3 data I
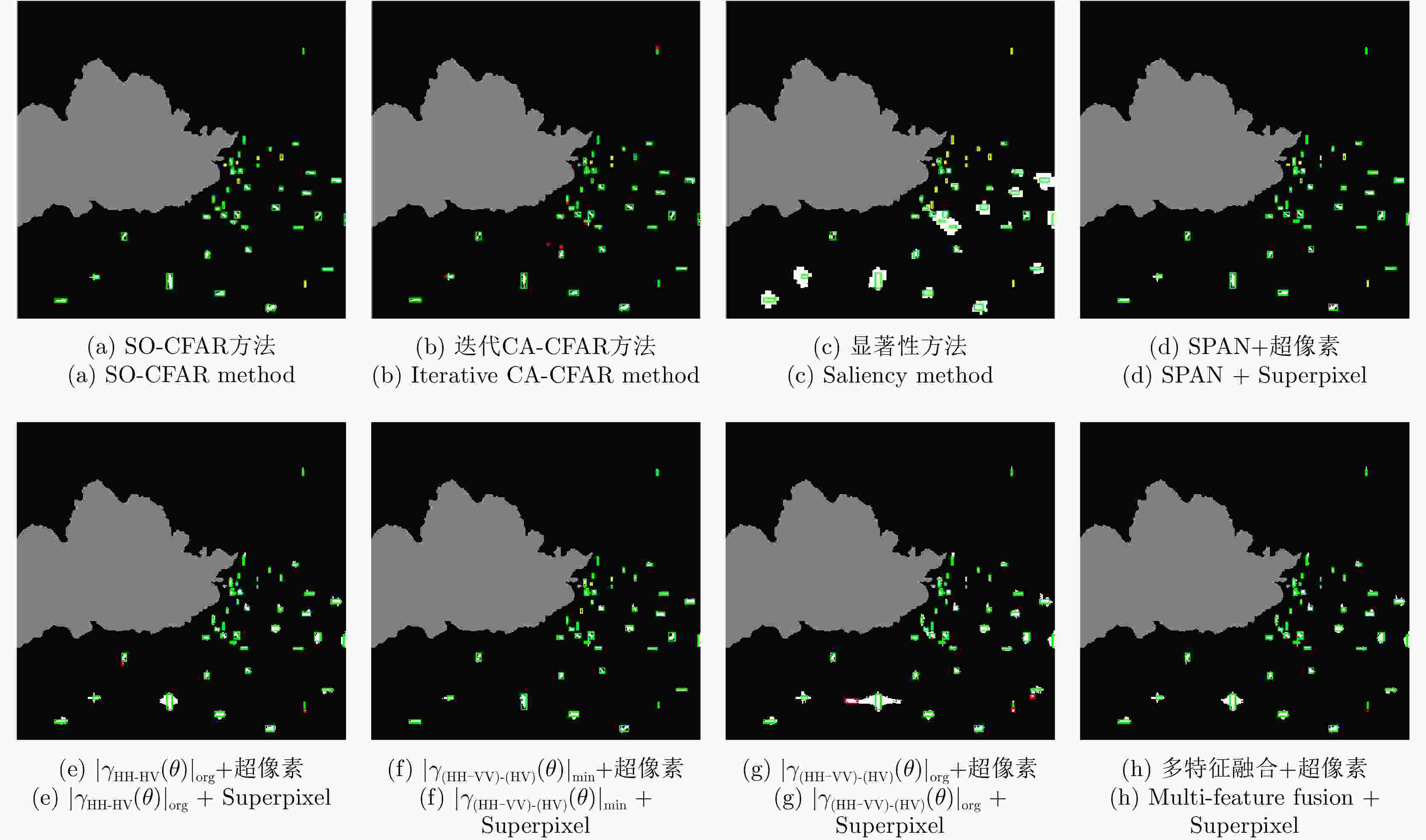
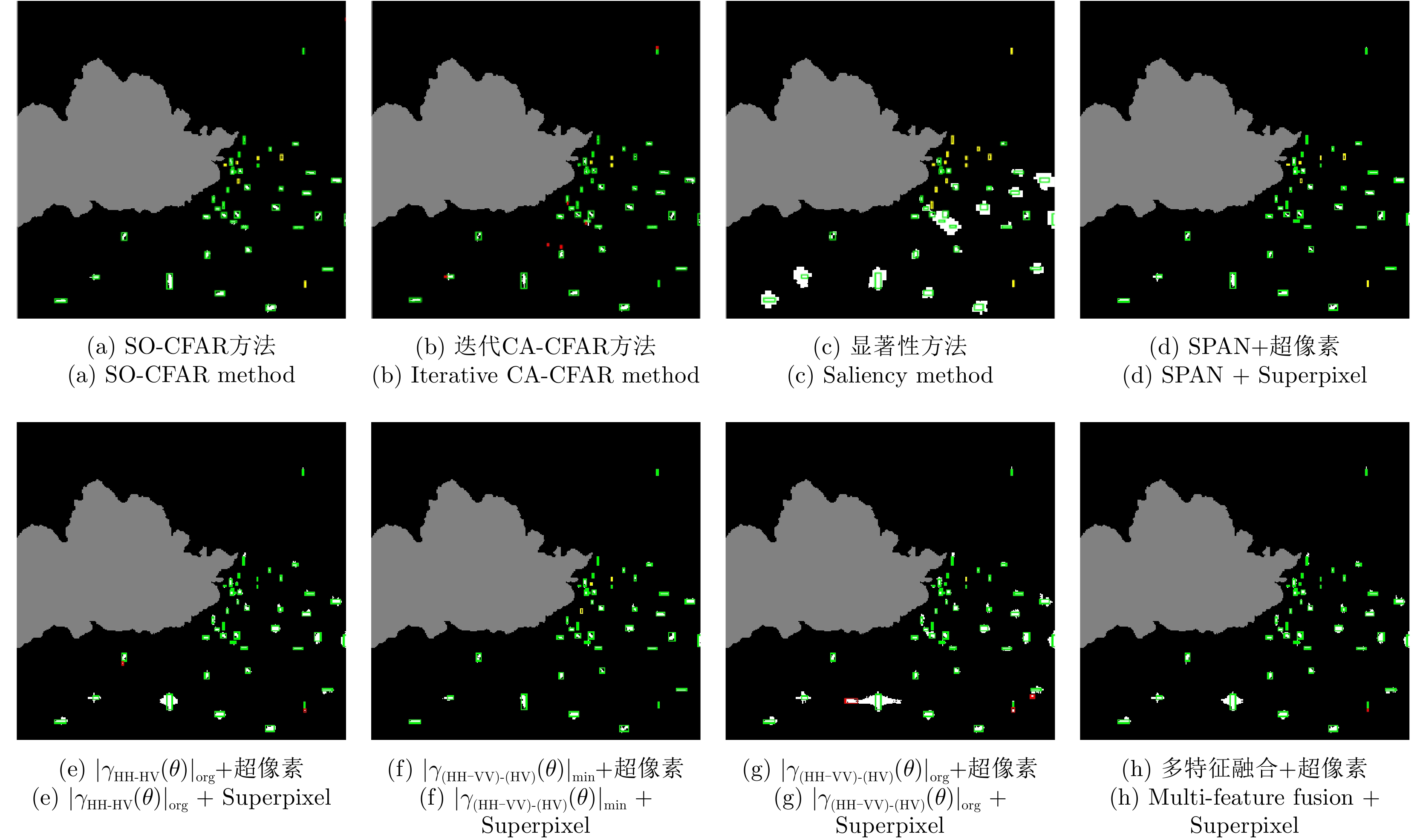
图 10 高分三号数据II对比方法检测结果
Figure 10. Detection results of comparative methods with GaoFen-3 data II
表 1 Radarsat-2数据定量检测结果
Table 1. Quantitative detection results of Radarsat-2 data
方法 ${N_{\rm{C}}}$ ${N_{\rm{M}}}$ ${N_{{\rm{FA}}}}$ FoM (%) SO-CFAR方法[38] 126 11 0 91.97 迭代CA-CFAR方法[40] 114 23 0 83.21 显著性方法[12] 116 21 0 84.67 SPAN+超像素 133 4 0 97.08 ${\left| { {\gamma _{ {\rm{HH\text{-}HV} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 136 1 0 99.27 ${\left| { {\gamma _{ {\rm{(HH-VV)\text{-}(HV)} } } }(\theta )} \right|_{ {\rm{min} } } }$+超像素 135 2 3 96.43 ${\left| { {\gamma _{ {\rm{(HH-VV)\text{-} (HV)} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 136 1 1 98.55 多特征融合+超像素 135 2 1 97.83  下载: 导出CSV
下载: 导出CSV
表 2 高分三号数据I定量检测结果
Table 2. Quantitative detection results of GaoFen-3 data I
方法 ${N_{\rm{C}}}$ ${N_{\rm{M}}}$ ${N_{{\rm{FA}}}}$ FoM (%) SO-CFAR方法[38] 183 59 0 75.62 迭代CA-CFAR方法[40] 166 76 0 68.60 显著性方法[12] 215 27 0 88.84 SPAN+超像素 174 68 0 71.90 ${\left| { {\gamma _{ {\rm{HH\text{-}HV} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 240 2 10 95.24 ${\left| { {\gamma _{ {\rm{(HH-VV)\text{-}(HV)} } } }(\theta )} \right|_{ {\rm{min} } } }$+超像素 238 4 8 95.20 ${\left| { {\gamma _{ {\rm{(HH-VV)\text{-}(HV)} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 241 1 11 95.26 多特征融合+超像素 239 3 8 95.60
下载: 导出CSV
表 3 高分三号数据II定量检测结果
Table 3. Quantitative detection results of GaoFen-3 data II
方法 ${N_{\rm{C}}}$ ${N_{\rm{M}}}$ ${N_{{\rm{FA}}}}$ FoM (%) SO-CFAR方法[38] 38 6 1 84.44 迭代CA-CFAR方法[40] 41 3 6 82.00 显著性方法[12] 31 13 0 70.45 SPAN+超像素 38 6 0 86.36 ${\left| { {\gamma _{ {\rm{HH\text{-}HV} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 44 0 2 95.65 ${\left| { {\gamma _{ {\rm{(HH-VV)\text{-}(HV)} } } }(\theta )} \right|_{ {\rm{min} } } }$+超像素 41 3 0 93.18 ${\left| { {\gamma _{ {\rm{(HH-VV) \text{-}(HV)} } } }(\theta )} \right|_{ {\rm{org} } } }$+超像素 43 1 3 91.49 多特征融合+超像素 44 0 1 97.78
下载: 导出CSV
-
[1] 王雪松, 陈思伟. 合成孔径雷达极化成像解译识别技术的进展与展望[J]. 雷达学报, 2020, 9(2): 259–276. doi: 10.12000/JR19109WANG Xuesong and CHEN Siwei. Polarimetric synthetic aperture radar interpretation and recognition: Advances and perspectives[J]. Journal of Radars, 2020, 9(2): 259–276. doi: 10.12000/JR19109 [2] 杜兰, 王兆成, 王燕, 等. 复杂场景下单通道SAR目标检测及鉴别研究进展综述[J]. 雷达学报, 2020, 9(1): 34–54. doi: 10.12000/JR19104DU Lan, WANG Zhaocheng, WANG Yan, et al. Survey of research progress on target detection and discrimination of single-channel SAR images for complex scenes[J]. Journal of Radars, 2020, 9(1): 34–54. doi: 10.12000/JR19104 [3] 张杰, 张晰, 范陈清, 等. 极化SAR在海洋探测中的应用与探讨[J]. 雷达学报, 2016, 5(6): 596–606. doi: 10.12000/JR16124ZHANG Jie, ZHANG Xi, FAN Chenqing, et al. Discussion on application of polarimetric synthetic aperture radar in marine surveillance[J]. Journal of Radars, 2016, 5(6): 596–606. doi: 10.12000/JR16124 [4] LENG Xiangguang, JI Kefeng, ZHOU Shilin, et al. Fast shape parameter estimation of the complex generalized gaussian distribution in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(11): 1933–1937. doi: 10.1109/LGRS.2019.2960095 [5] 艾加秋, 齐向阳, 禹卫东. 改进的SAR图像双参数CFAR舰船检测算法[J]. 电子与信息学报, 2009, 31(12): 2881–2885.AI Jiaqiu, QI Xiangyang, and YU Weidong. Improved two parameter CFAR ship detection algorithm in SAR images[J]. Journal of Electronics &Information Technology, 2009, 31(12): 2881–2885. [6] GAO Gui, LI Gaosheng, and LI Yipeng. Shape parameter estimator of the generalized gaussian distribution based on the MoLC[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 350–354. doi: 10.1109/LGRS.2017.2787558 [7] LI Mingdian, CUI Xingchao, and CHEN Siwei. An adaptive superpixel-level detection method for ship target in SAR image[J]. IEEE Geoscience and Remote Sensing Letters, 2020, in press. [8] LENG Xiangguang, JI Kefeng, XING Xiangwei, et al. Area ratio invariant feature group for ship detection in SAR imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(7): 2376–2388. doi: 10.1109/JSTARS.2018.2820078 [9] LENG Xiangguang, JI Kefeng, YANG Kai, et al. A bilateral CFAR algorithm for ship detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(7): 1536–1540. doi: 10.1109/LGRS.2015.2412174 [10] RENGA A, GRAZIANO M D, and MOCCIA A. Segmentation of marine SAR images by sublook analysis and application to sea traffic monitoring[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(3): 1463–1477. doi: 10.1109/TGRS.2018.2866934 [11] ACHANTA R, SHAJI A, SMITH K, et al. SLIC superpixels compared to state-of-the-art superpixel methods[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11): 2274–2282. doi: 10.1109/TPAMI.2012.120 [12] ZHAI Liang, LI Yu, and SU Yi. Inshore ship detection via saliency and context information in high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1870–1874. doi: 10.1109/LGRS.2016.2616187 [13] LI Tao, LIU Zheng, XIE Rong, et al. An improved superpixel-level CFAR detection method for ship targets in high-resolution SAR images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(1): 184–194. doi: 10.1109/JSTARS.2017.2764506 [14] OUCHI K, TAMAKI S, YAGUCHI H, et al. Ship detection based on coherence images derived from cross correlation of multilook SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 1(3): 184–187. doi: 10.1109/LGRS.2004.827462 [15] TOUZI R, CHARBONNEAU F, HAWKINS R K, et al. Ship-sea contrast optimization when using polarimetric SARs[C]. IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, Australia, 2001: 426–428. [16] 王雪松. 雷达极化技术研究现状与展望[J]. 雷达学报, 2016, 5(2): 119–131. doi: 10.12000/JR16039WANG Xuesong. Status and prospects of radar polarimetry techniques[J]. Journal of Radars, 2016, 5(2): 119–131. doi: 10.12000/JR16039 [17] 杨健, 曾亮, 马文婷, 等. 雷达目标极化散射特征提取的研究进展[J]. 电波科学学报, 2019, 34(1): 12–18. doi: 10.13443/j.cjors.2018091501YANG Jian, ZENG Liang, MA Wenting, et al. Recent advances on extraction of polarimetric scattering features of radar target[J]. Chinese Journal of Radio Science, 2019, 34(1): 12–18. doi: 10.13443/j.cjors.2018091501 [18] WANG Yinghua and LIU Hongwei. PolSAR ship detection based on superpixel-level scattering mechanism distribution features[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(8): 1780–1784. doi: 10.1109/LGRS.2015.2425873 [19] HE Jinglu, WANG Yinghua, LIU Hongwei, et al. A novel automatic PolSAR ship detection method based on superpixel-level local information measurement[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 384–388. doi: 10.1109/LGRS.2017.2789204 [20] CHEN Siwei, WANG Xuesong, XIAO Shunping, et al. General polarimetric model-based decomposition for coherency matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3): 1843–1855. doi: 10.1109/TGRS.2013.2255615 [21] YAMAGUCHI Y, SATO A, BOERNER W M, et al. Four-component scattering power decomposition with rotation of coherency matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6): 2251–2258. doi: 10.1109/TGRS.2010.2099124 [22] AN Wentao and LIN Mingsen. An incoherent decomposition algorithm based on polarimetric symmetry for multilook polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(4): 2383–2397. doi: 10.1109/TGRS.2019.2948683 [23] CHEN Siwei, WANG Xuesong, LI Yongzhen, et al. Adaptive model-based polarimetric decomposition using PolInSAR coherence[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3): 1705–1718. doi: 10.1109/TGRS.2013.2253780 [24] XI Yuyang, LANG Haitao, TAO Yunhong, et al. Four-component model-based decomposition for ship targets using PolSAR data[J]. Remote Sensing, 2017, 9(6): 621. doi: 10.3390/rs9060621 [25] SUGIMOTO M, OUCHI K, and NAKAMURA Y. On the novel use of model-based decomposition in SAR polarimetry for target detection on the sea[J]. Remote Sensing Letters, 2013, 4(9): 843–852. doi: 10.1080/2150704X.2013.804220 [26] CONRADSEN K, NIELSEN A A, SCHOU J, et al. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(1): 4–19. doi: 10.1109/TGRS.2002.808066 [27] WANG Haipeng, XU Feng, and CHEN Shanshan. Saliency detector for SAR images based on pattern recurrence[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(7): 2891–2900. doi: 10.1109/JSTARS.2016.2521709 [28] CUI Xingchao, SU Yi, and CHEN Siwei. A saliency detector for polarimetric SAR ship detection using similarity test[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(9): 3423–3433. doi: 10.1109/JSTARS.2019.2925833 [29] ZHANG Tao, YANG Zhen, and XIONG Huilin. PolSAR ship detection based on the polarimetric covariance difference matrix[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(7): 3348–3359. doi: 10.1109/JSTARS.2017.2671904 [30] ZHANG Tao, JI Jinsheng, LI Xiaofeng, et al. Ship detection from PolSAR imagery using the complete polarimetric covariance difference matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 2824–2839. doi: 10.1109/TGRS.2018.2877821 [31] NUNZIATA F, MIGLIACCIO M, and BROWN C E. Reflection symmetry for polarimetric observation of man-made metallic targets at sea[J]. IEEE Journal of Oceanic Engineering, 2012, 37(3): 384–394. doi: 10.1109/JOE.2012.2198931 [32] VELOTTO D, NUNZIATA F, MIGLIACCIO M, et al. Dual-polarimetric TerraSAR-X SAR data for target at sea observation[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1114–1118. doi: 10.1109/LGRS.2012.2231048 [33] LIU Tao, YANG Ziyuan, YANG Jian, et al. CFAR ship detection methods using compact polarimetric SAR in a K-Wishart distribution[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(10): 3737–3745. doi: 10.1109/JSTARS.2019.2923009 [34] PAPPAS O, ACHIM A, and BULL D. Superpixel-level CFAR detectors for ship detection in SAR imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(9): 1397–1401. doi: 10.1109/LGRS.2018.2838263 [35] GAO Gui. A parzen-window-kernel-based CFAR algorithm for ship detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(3): 557–561. doi: 10.1109/LGRS.2010.2090492 [36] 黄寅礼, 孙路, 郭亮, 等. 基于空间变迹滤波旁瓣抑制与有序统计恒虚警率的舰船检测算法[J]. 雷达学报, 2020, 9(2): 335–342. doi: 10.12000/JR19082HUANG Yinli, SUN Lu, GUO Liang, et al. Ship detection algorithm based on spatially variant apodization sidelobe suppression and order statistic-constant false alarm rate[J]. Journal of Radars, 2020, 9(2): 335–342. doi: 10.12000/JR19082 [37] HANSEN V G and SAWYERS J H. Detectability loss due to "greatest of" selection in a cell-averaging CFAR[J]. IEEE Transactions on Aerospace and Electronic Systems, 1980, AES-16(1): 115–118. doi: 10.1109/TAES.1980.308885 [38] TRUNK G V. Range resolution of targets using automatic detectors[J]. IEEE Transactions on Aerospace and Electronic Systems, 1978, AES-14(5): 750–755. doi: 10.1109/TAES.1978.308625 [39] GAO Gui, LIU Li, ZHAO Lingjun, et al. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(6): 1685–1697. doi: 10.1109/TGRS.2008.2006504 [40] CUI Yi, ZHOU Guangyi, YANG Jian, et al. Yamaguchi. On the iterative censoring for target detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 641–645. doi: 10.1109/LGRS.2010.2098434 [41] AN Wentao, XIE Chunhua, and YUAN Xinzhe. An improved iterative censoring scheme for CFAR ship detection with SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4585–4595. doi: 10.1109/TGRS.2013.2282820 [42] 陈祥, 孙俊, 尹奎英, 等. 基于CFAR级联的SAR图像舰船目标检测算法[J]. 现代雷达, 2012, 34(9): 50–54, 58. doi: 10.3969/j.issn.1004-7859.2012.09.011CHEN Xiang, SUN Jun, YIN Kuiying, et al. An algorithm of ship target detection in SAR images based on cascaded CFAR[J]. Modern Radar, 2012, 34(9): 50–54, 58. doi: 10.3969/j.issn.1004-7859.2012.09.011 [43] IERVOLINO P and GUIDA R. A novel ship detector based on the generalized-likelihood ratio test for SAR imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(8): 3616–3630. doi: 10.1109/JSTARS.2017.2692820 [44] GAO Gui and SHI Gongtao. CFAR ship detection in nonhomogeneous sea clutter using polarimetric SAR data based on the notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(8): 4811–4824. doi: 10.1109/TGRS.2017.2701813 [45] MARINO A. A notch filter for ship detection with polarimetric SAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(3): 1219–1232. doi: 10.1109/JSTARS.2013.2247741 [46] MARINO A and HAJNSEK I. Statistical tests for a ship detector based on the polarimetric notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(8): 4578–4595. doi: 10.1109/TGRS.2015.2402312 [47] GAO Gui and SHI Gongtao. Ship detection in dual-channel ATI-SAR based on the notch filter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(8): 4795–4810. doi: 10.1109/TGRS.2017.2701810 [48] LIN Zhao, JI Kefeng, LENG Xiangguang, et al. Squeeze and excitation rank faster R-CNN for ship detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(5): 751–755. doi: 10.1109/LGRS.2018.2882551 [49] CUI Zongyong, LI Qi, CAO Zongjie, et al. Dense attention pyramid networks for multi-scale ship detection in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(11): 8983–8997. doi: 10.1109/TGRS.2019.2923988 [50] WEI Shunjun, SU Hao, MING Jing, et al. Precise and robust ship detection for high-resolution SAR imagery based on HR-SDNet[J]. Remote Sensing, 2020, 12(1): 167. doi: 10.3390/rs12010167 [51] 陈思伟, 李永祯, 王雪松, 等. 极化SAR目标散射旋转域解译理论与应用[J]. 雷达学报, 2017, 6(5): 442–455. doi: 10.12000/JR17033CHEN Siwei, LI Yongzhen, WANG Xuesong, et al. Polarimetric SAR target scattering interpretation in rotation domain: Theory and application[J]. Journal of Radars, 2017, 6(5): 442–455. doi: 10.12000/JR17033 [52] CHEN Siwei, WANG Xuesong, and SATO M. Uniform polarimetric matrix rotation theory and its applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4756–4770. doi: 10.1109/TGRS.2013.2284359 [53] CHEN Siwei. Polarimetric coherence pattern: A visualization and characterization tool for PolSAR data investigation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(1): 286–297. doi: 10.1109/TGRS.2017.2746662 [54] CUI Xingchao, TAO Chensong, SU Yi, et al. PolSAR ship detection based on polarimetric correlation pattern[J]. IEEE Geoscience and Remote Sensing Letters, 2020, in press. doi: 10.1109/LGRS.2020.2976477 [55] 陶臣嵩, 陈思伟, 李永祯, 等. 结合旋转域极化特征的极化SAR地物分类[J]. 雷达学报, 2017, 6(5): 524–532. doi: 10.12000/JR16131TAO Chensong, CHEN Siwei, LI Yongzhen, et al. Polarimetric SAR terrain classification using polarimetric features derived from rotation domain[J]. Journal of Radars, 2017, 6(5): 524–532. doi: 10.12000/JR16131 [56] WEISS M. Analysis of some modified cell-averaging CFAR processors in multiple-target situations[J]. IEEE Transactions on Aerospace and Electronic Systems, 1982, AES-18(1): 102–114. doi: 10.1109/TAES.1982.309210 -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

