
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Jamming Method of Passive Radar Systems Based on Characteristics of Signal Structure
-
摘要: 雷达及其对抗技术在雷达系统发展道路上相互促进,不断进步。近年来,外辐射源雷达凭借其优异的性能受到了国内外研究机构的广泛关注,相关技术得到飞速发展,部分设备已投入使用,但针对该新型雷达的干扰技术研究较少。该文基于辐射源信号结构,分析其信号组成,提出了一种基于信号结构特点的外辐射源雷达干扰方法。以数字广播电视外辐射源雷达为例,结合外辐射源雷达干扰模型,在所提方法下,干扰信号将在距离多普勒谱上形成干扰峰或干扰条带,可有效遮蔽目标,并形成虚假航迹,实现了对外辐射源雷达的干扰目的。仿真结果表明了干扰信号的特性和对目标干扰的有效性,为所提干扰方法在外辐射源雷达中的实际应用奠定基础。所提方法不仅适用于国内外数字广播电视外辐射源雷达,同时可扩展应用于其他类型的外辐射源雷达。Abstract: Radar and its countermeasure technology promote each other and make continuous progress in the development of radar system. Recently, passive radar systems have received extensive attention by research institutes at home and abroad owing to their excellent performance. Moreover, the relevant technologies have been developed rapidly with some equipment being placed into operation. However, there is a lack of research on the jamming technology for this new-type radar. Here, we provide an analysis of the signal component based on the structure of radiation source signal. Next, we propose a passive radar jamming method based on the characteristic of signal structure, taking digital broadcasting television-based passive radar as an example. In the proposed passive radar jamming model, the jamming signal produces an interference peak or interference band in the range-Doppler map. These interference peaks or bands effectively mask the target and lead to a false track, thereby achieving the goal of jamming the passive radar system. Both the characteristics of the jamming signal and the effectiveness of the jamming method are verified by the simulation results. Moreover, the results presented here establish the foundation for practical application of a passive radar jamming signal. The proposed method could be applied into both the digital broadcasting television-based passive radar at home and abroad as well as other types of passive radar.
-
Key words:
- Radar countermeasure /
- Passive radar /
- Jamming /
- Signal structure /
- Digital broadcasting television
-
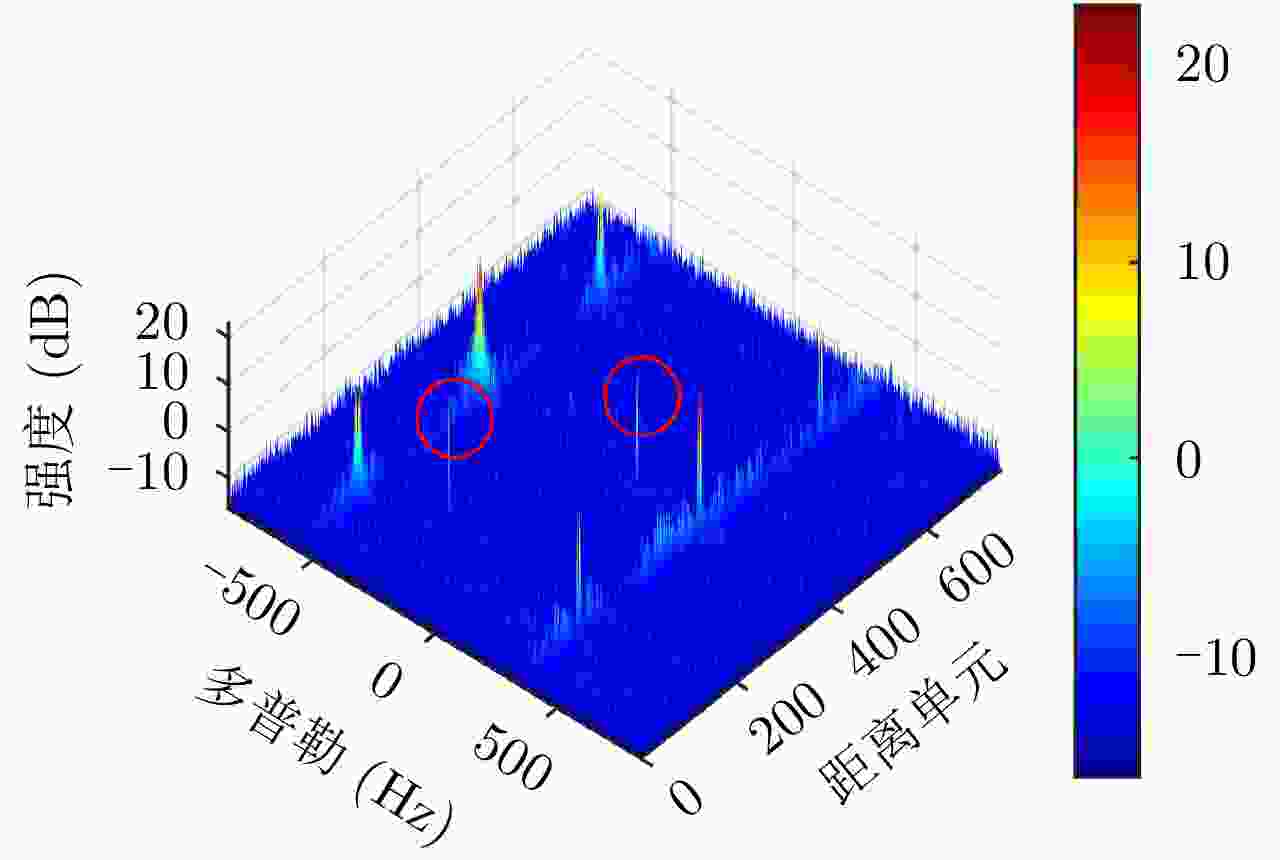
图 4 帧头干扰下DTMB外辐射源雷达的距离多普勒谱
Figure 4. The range-Doppler map for DTMB-based passive radar under the jamming of the frame header
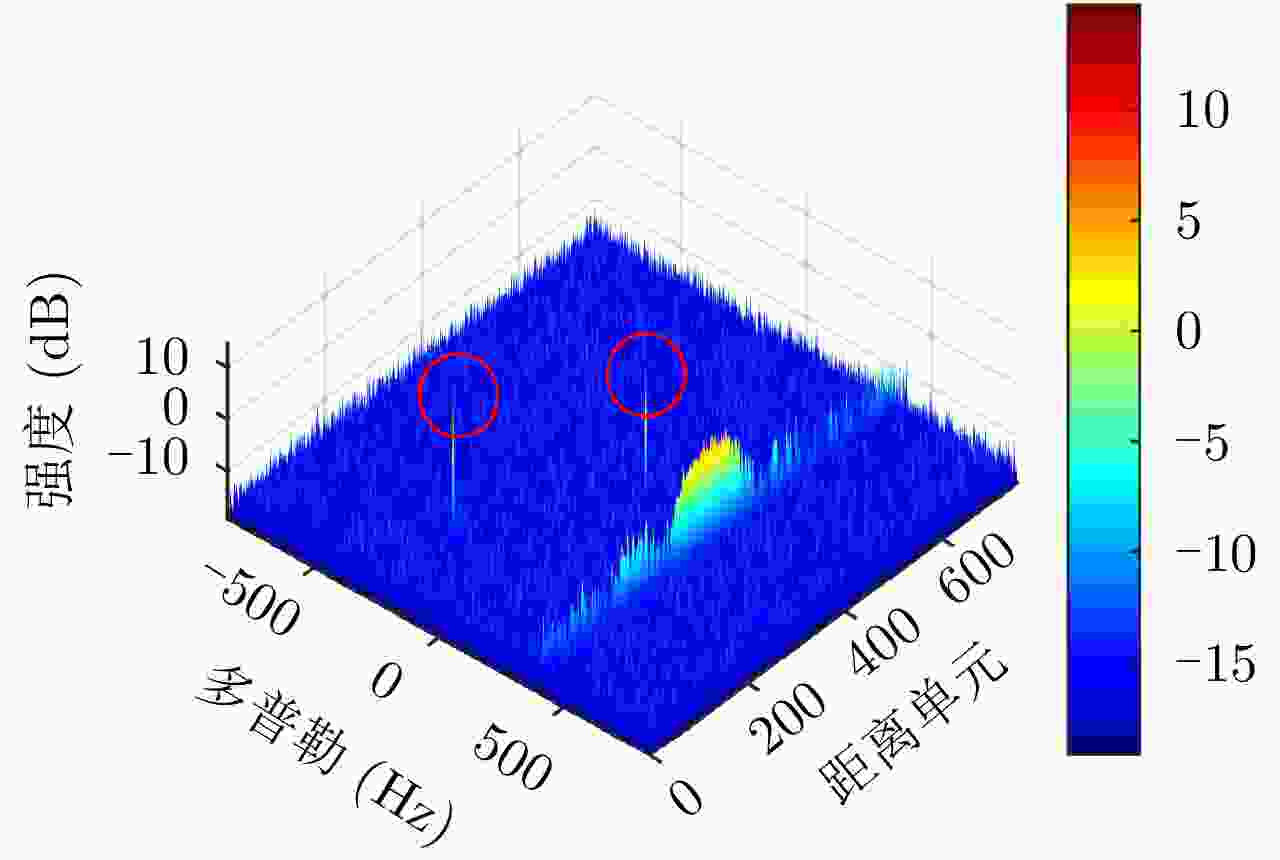
图 5 系统信息干扰下DTMB外辐射源雷达的距离多普勒谱
Figure 5. The range-Doppler map for DTMB-based passive radar under the jamming of the system information
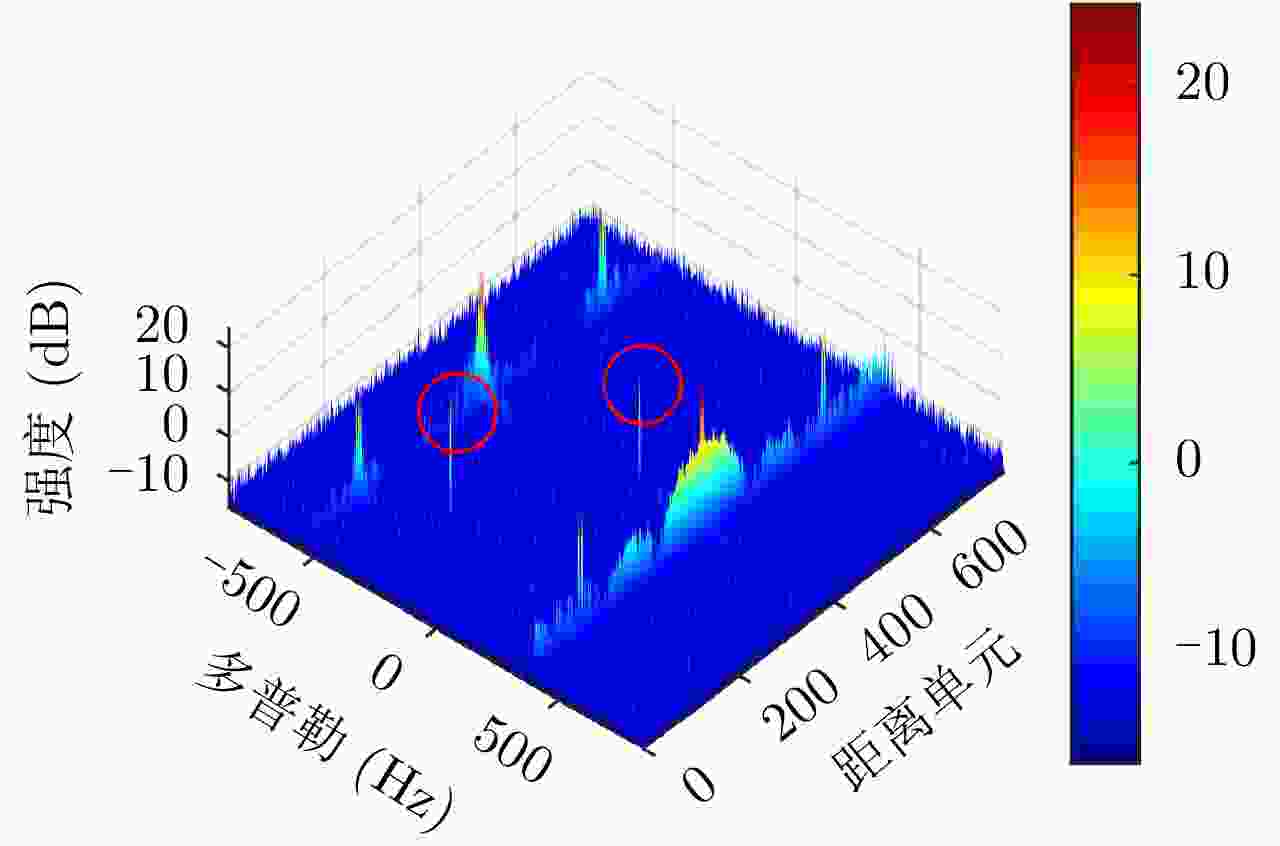
图 6 帧头&系统信息干扰下DTMB外辐射源雷达的距离多普勒谱
Figure 6. The range-Doppler map for DTMB-based passive radar under the jamming of the frame header and the system information
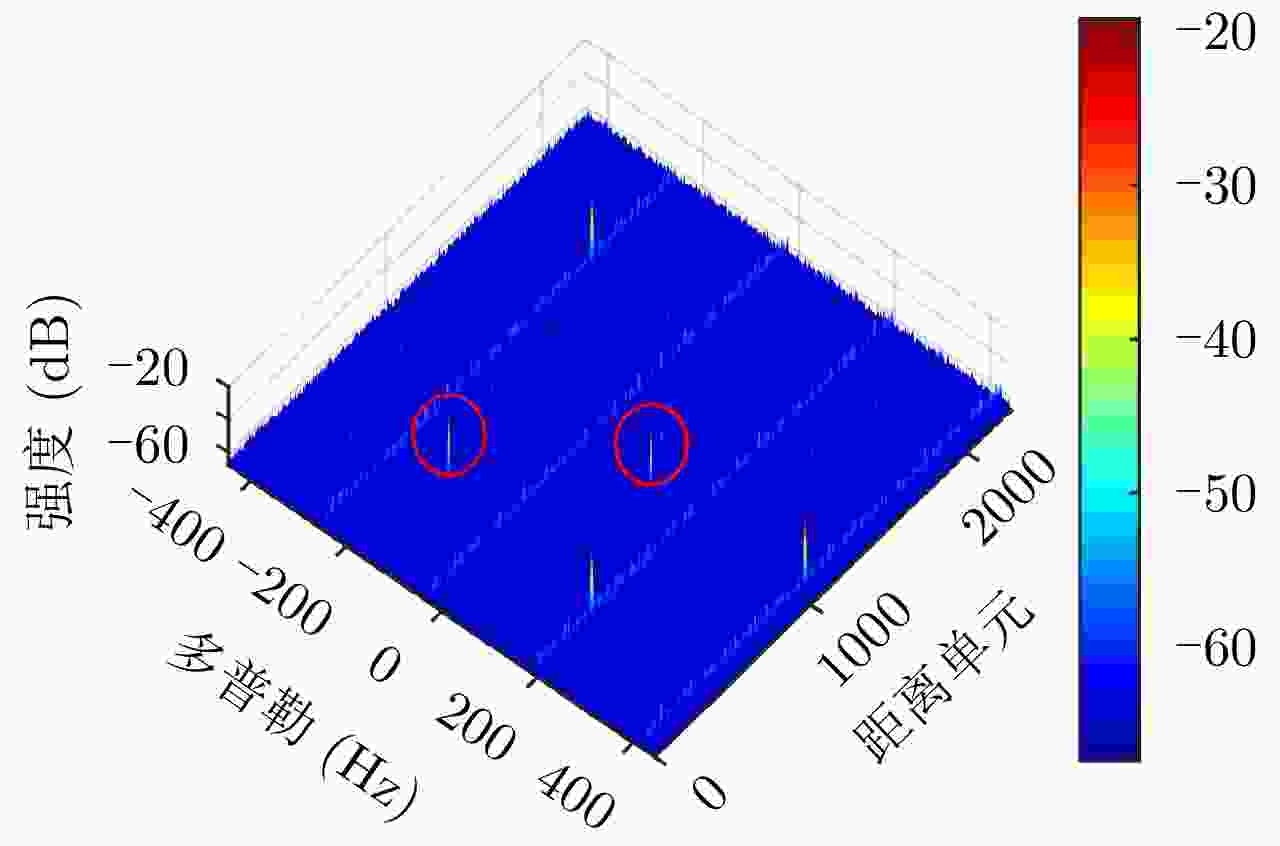
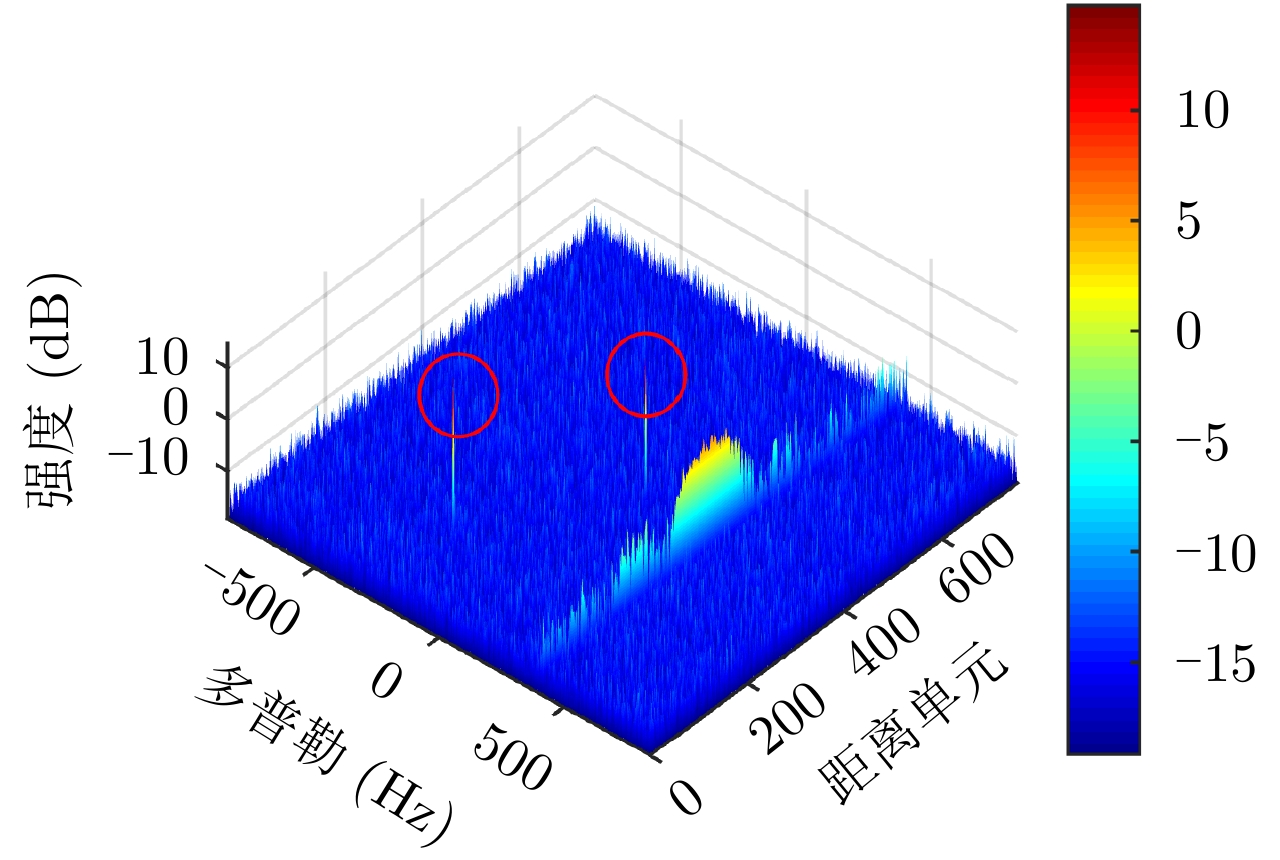
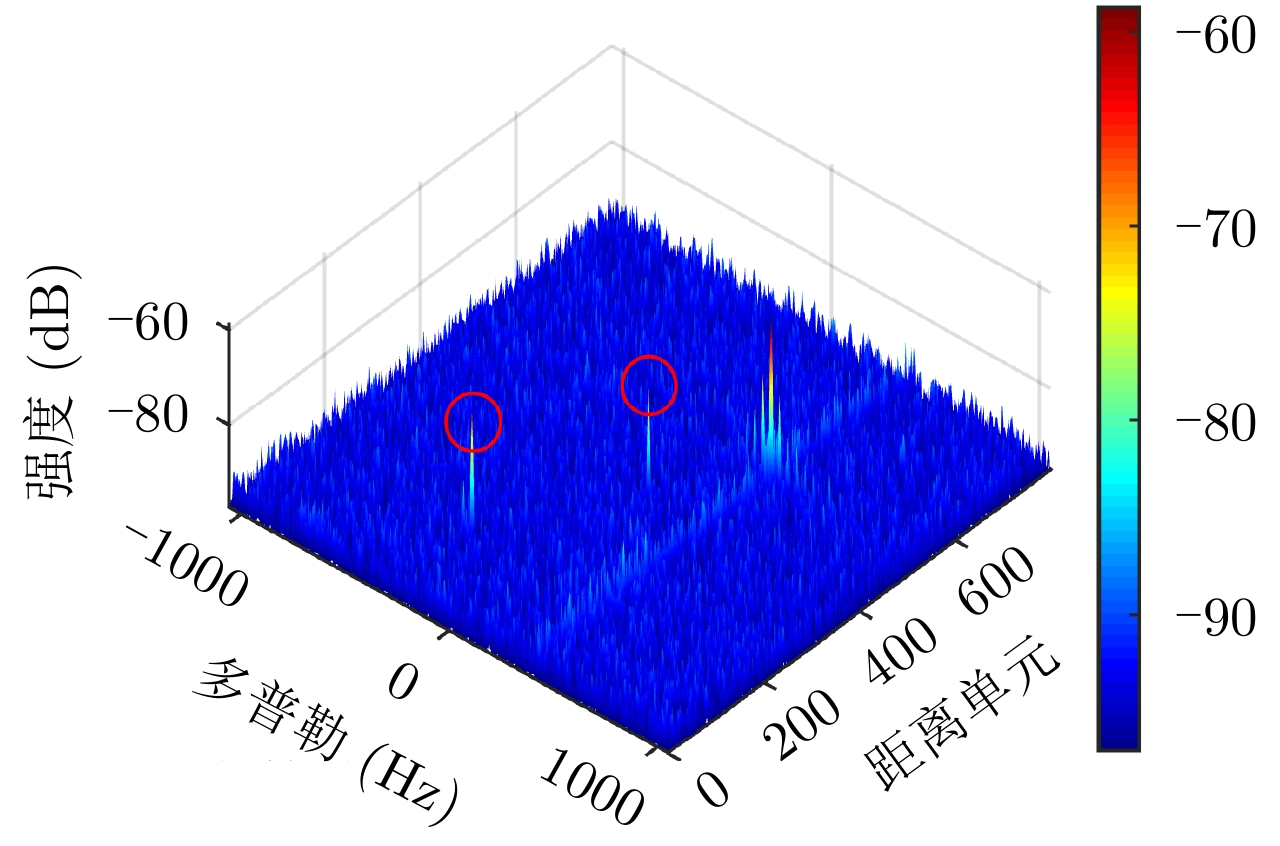
图 7 离散导频干扰下DVB-T外辐射源雷达的距离多普勒谱
Figure 7. The range-Doppler map for DVB-T-based passive radar under the jamming of the scatter pilot
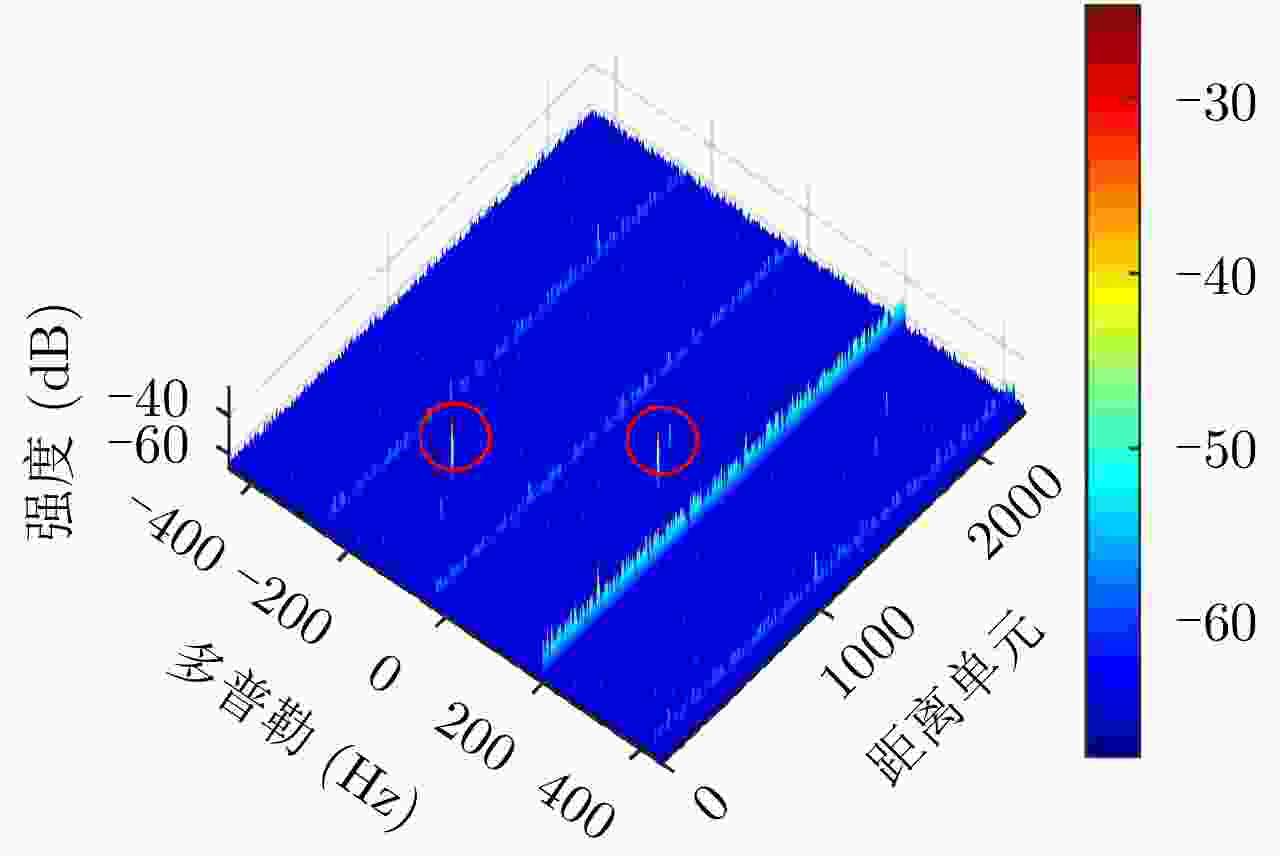
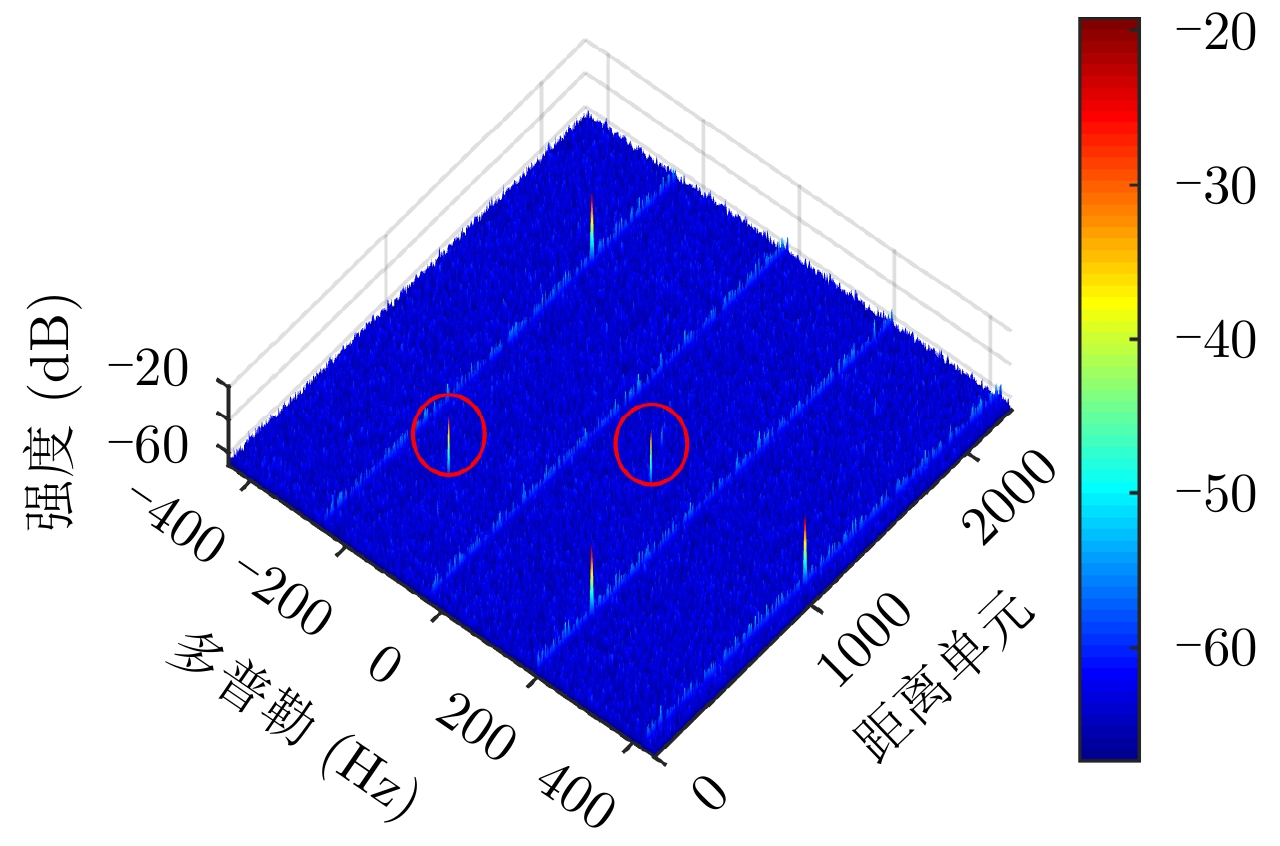
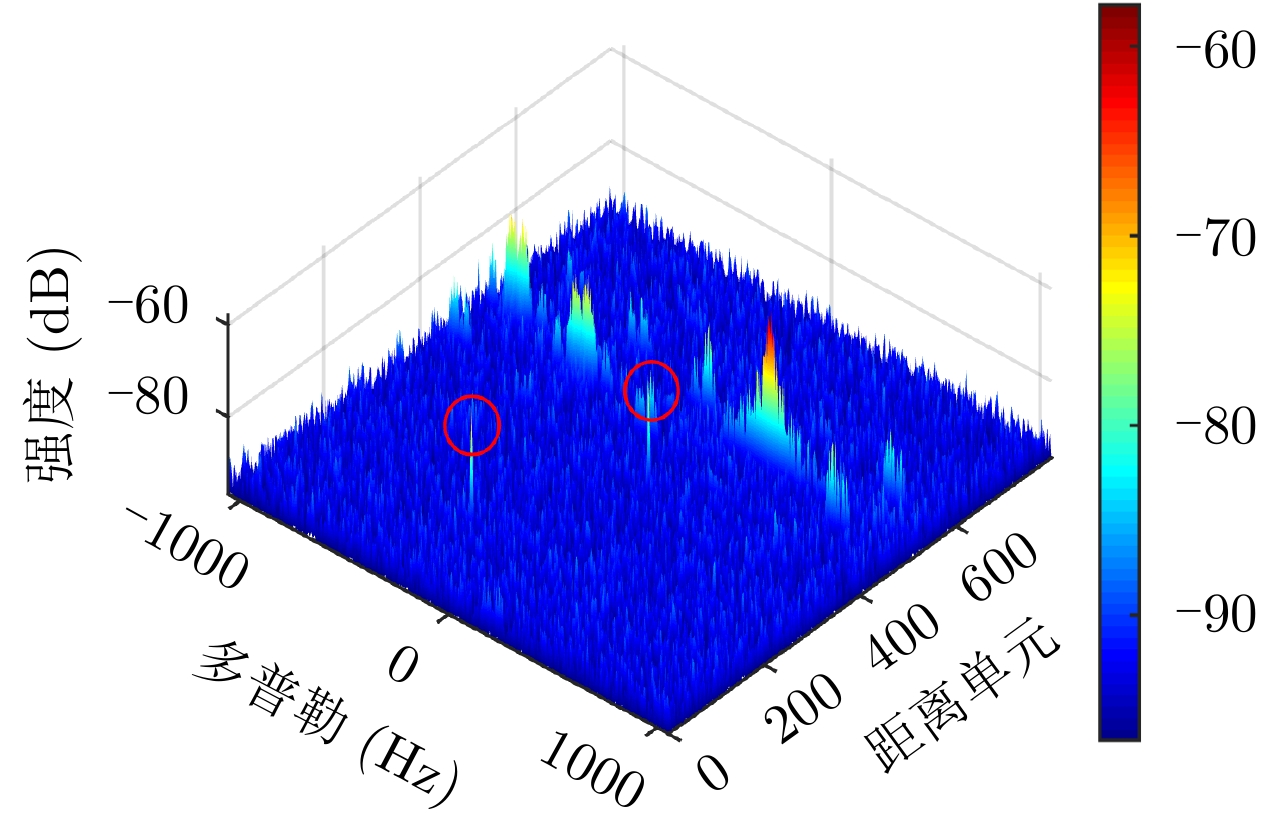
图 8 连续导频干扰下DVB-T外辐射源雷达的距离多普勒谱
Figure 8. The range-Doppler map for DVB-T-based passive radar under the jamming of the continuous pilot
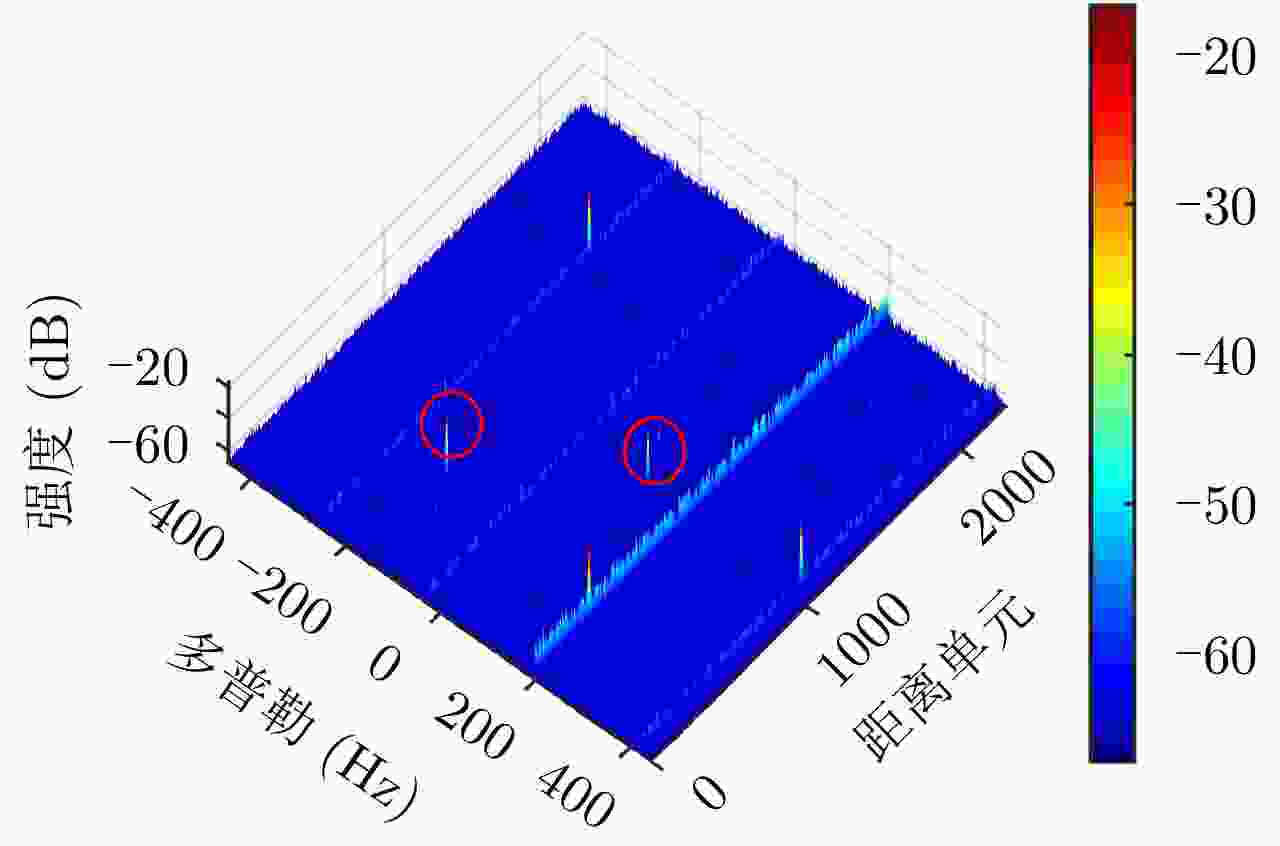
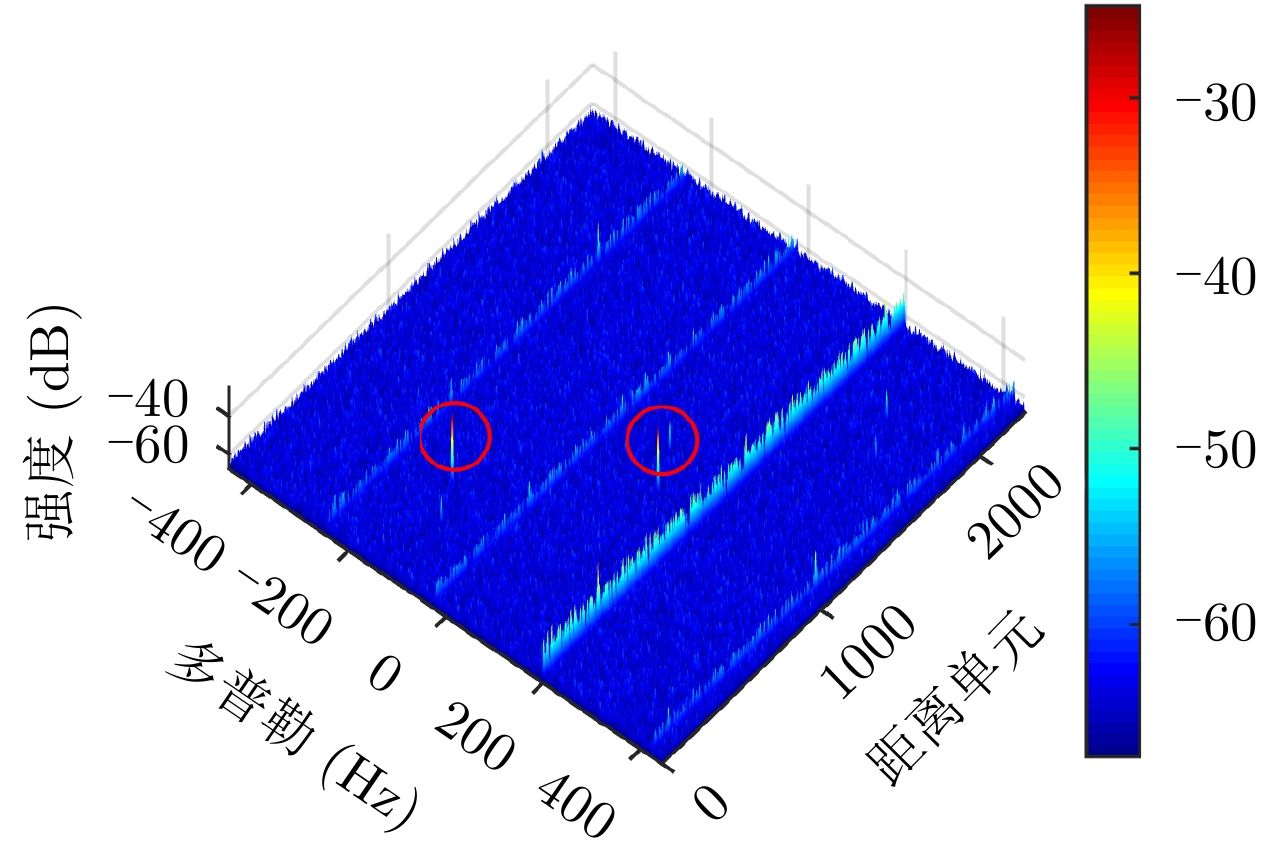
图 9 导频干扰下DVB-T外辐射源雷达的距离多普勒谱
Figure 9. The range-Doppler map for DVB-T-based passive radar under the jamming of the pilot
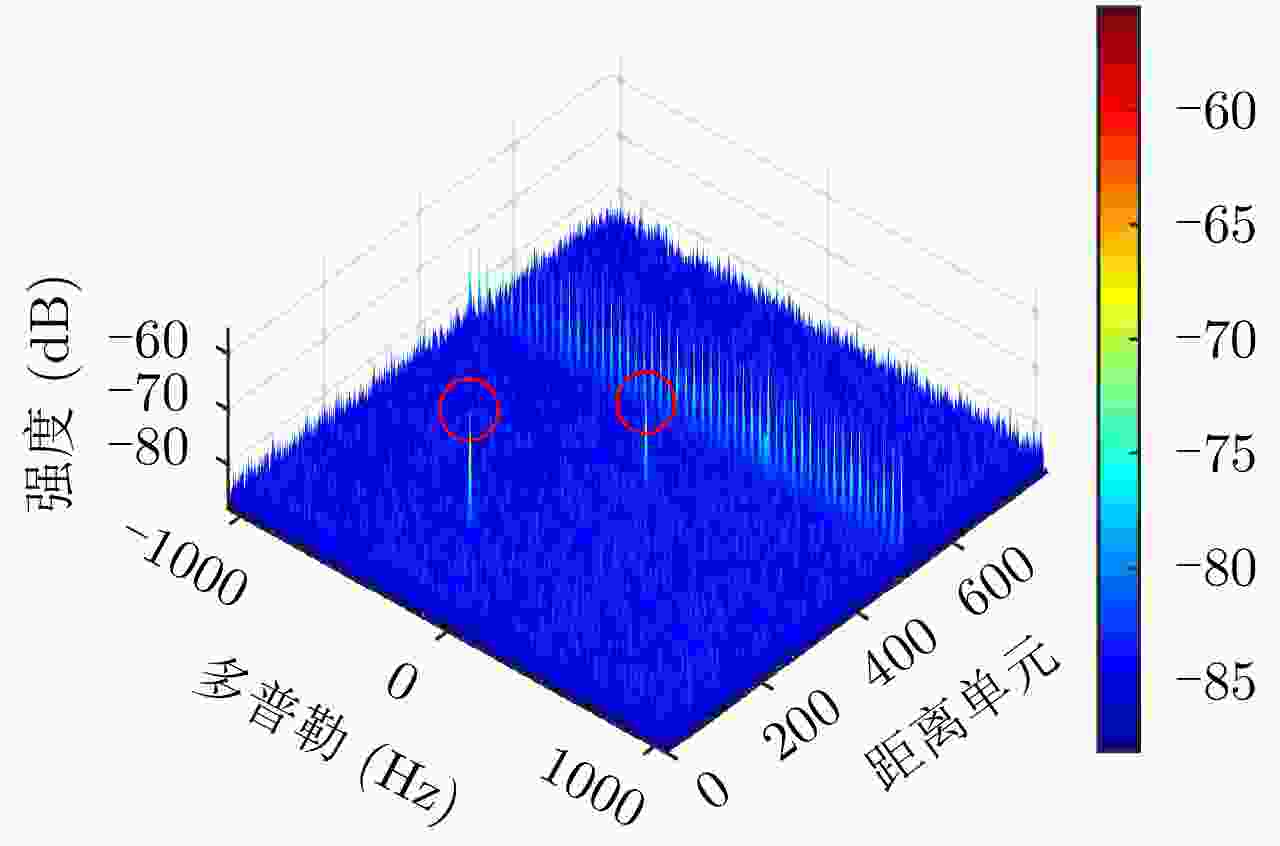
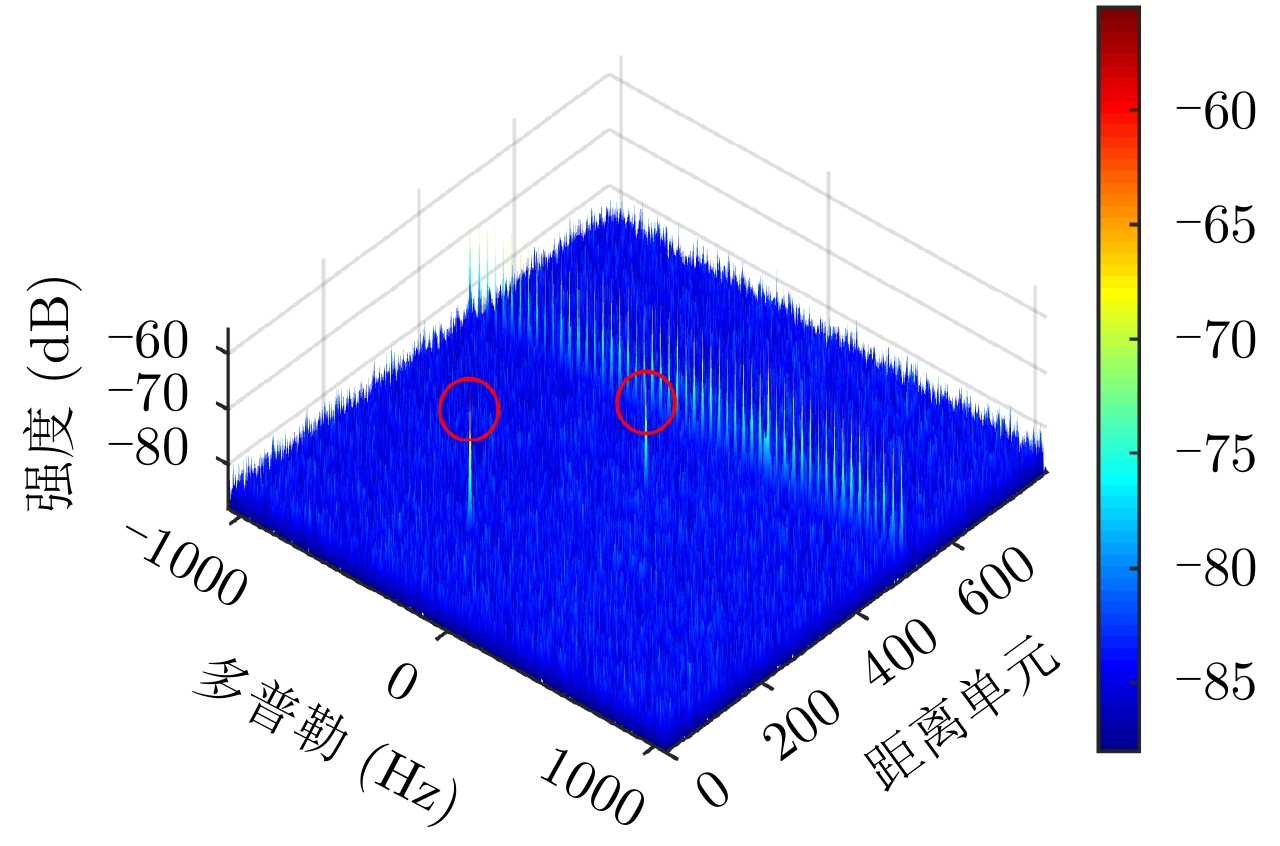
图 10 信标干扰下CMMB外辐射源雷达的距离多普勒谱
Figure 10. The range-Doppler map for CMMB-based passive radar under the jamming of the beacon
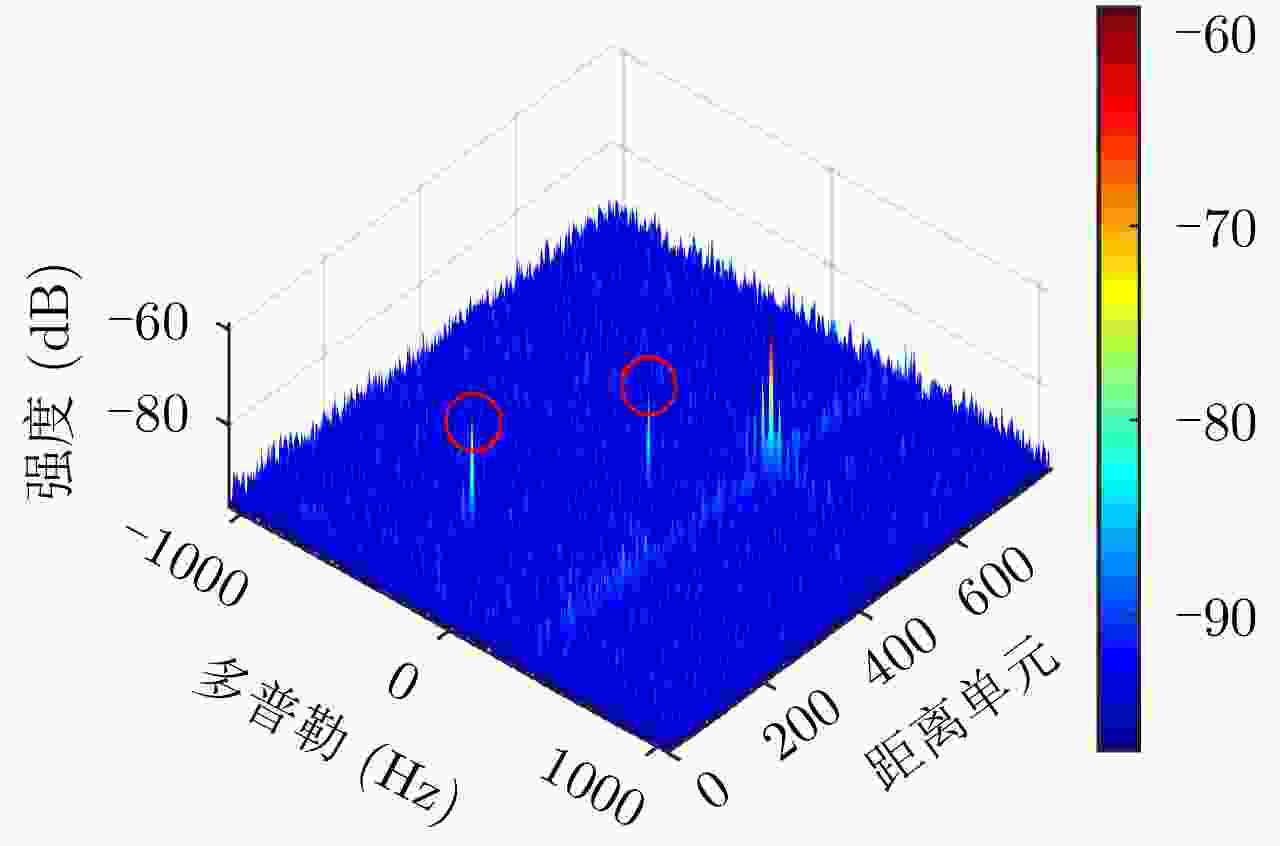
图 11 导频干扰下CMMB外辐射源雷达的距离多普勒谱
Figure 11. The range-Doppler map for CMMB-based passive radar under the jamming of the pilot
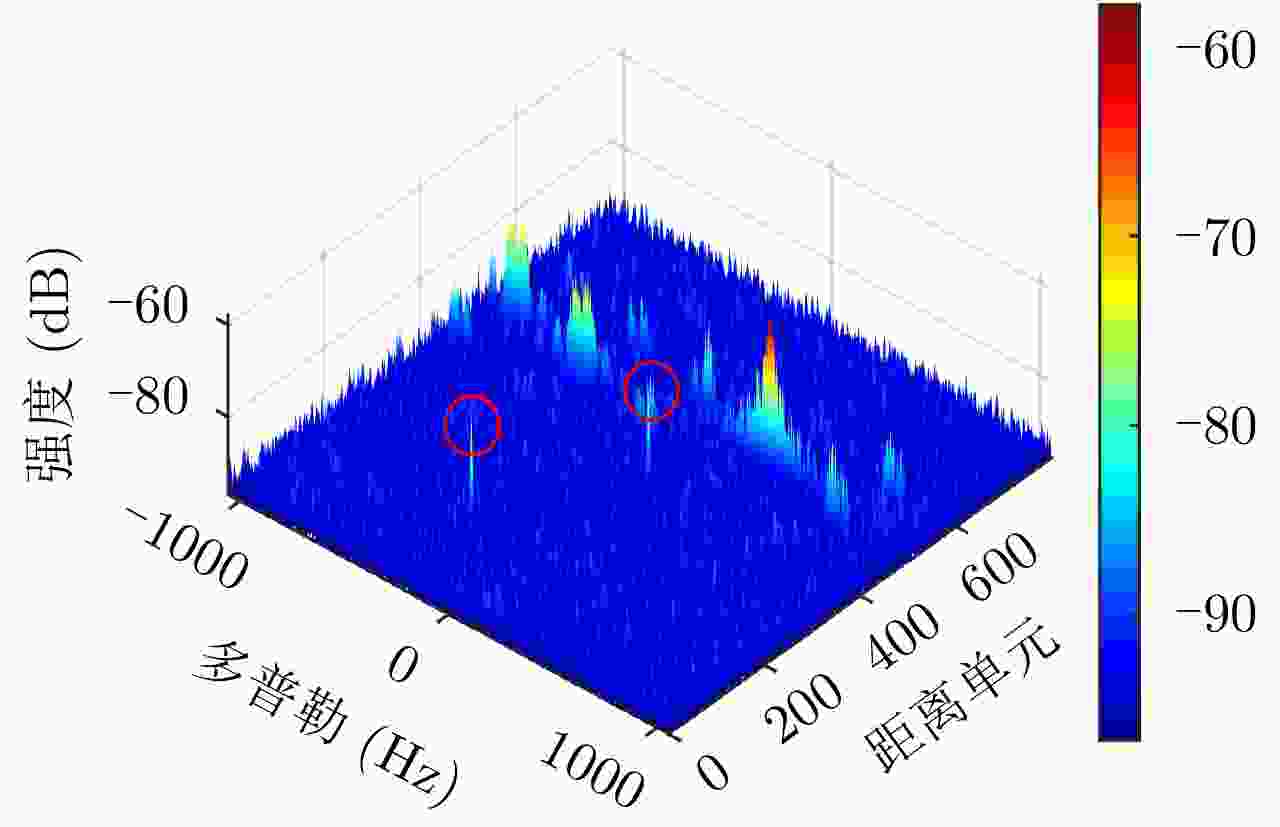
图 12 控制信道干扰下CMMB外辐射源雷达的距离多普勒谱
Figure 12. The range-Doppler map for CMMB-based passive radar under the jamming of the control channel
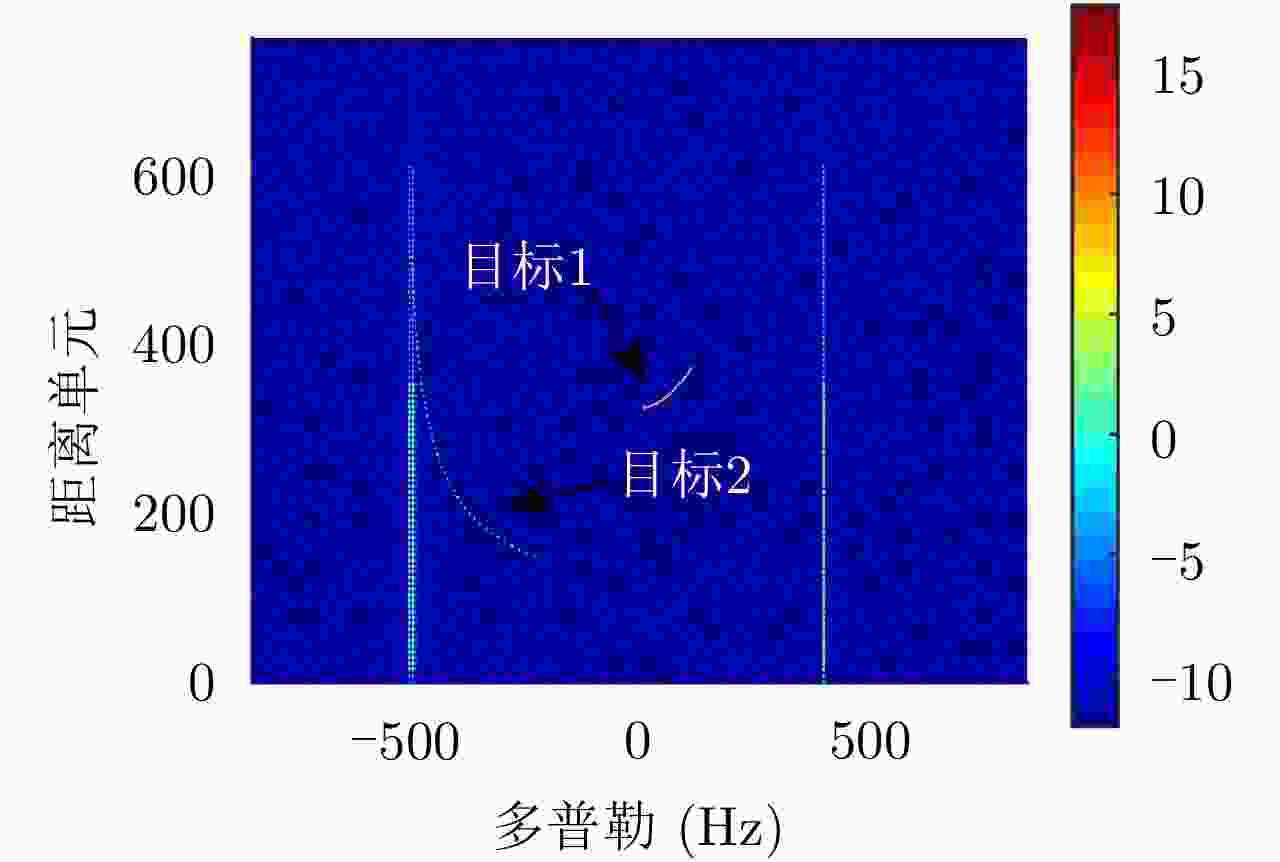
图 13 干扰存在情况下距离多普勒谱多场数据累积结果
Figure 13. The cumulative results of multiple-frame data of the range-Doppler map with the jamming
-
[1] 王沙飞, 鲍雁飞, 李岩. 认知电子战体系结构与技术[J]. 中国科学: 信息科学, 2018, 48(12): 1603–1613. doi: 10.1360/N112018-00153WANG Shafei, BAO Yanfei, and LI Yan. The architecture and technology of cognitive electronic warfare[J]. Scientia Sinica Informationis, 2018, 48(12): 1603–1613. doi: 10.1360/N112018-00153 [2] 何孟良, 李雯, 刘畅. 无线电电子对抗系统的发展前景及趋势[J]. 电子信息对抗技术, 2019, 34(6): 48–51, 84. doi: 10.3969/j.issn.1674-2230.2019.06.011HE Mengliang, LI Wen, and LIU Chang. The development prospect and trend of radio electronic counteraction[J]. Electronic Information Warfare Technology, 2019, 34(6): 48–51, 84. doi: 10.3969/j.issn.1674-2230.2019.06.011 [3] 陈文奎, 陶建义. 新体制雷达及其对抗技术综述[J]. 舰船电子对抗, 2010, 33(4): 9–14. doi: 10.16426/j.cnki.jcdzdk.2010.04.011CHEN Wenkui and TAO Jianyi. Summary of new system radar and their countermeasure techniques[J]. Shipboard Electronic Countermeasure, 2010, 33(4): 9–14. doi: 10.16426/j.cnki.jcdzdk.2010.04.011 [4] 万显荣, 易建新, 程丰, 等. 单频网分布式外辐射源雷达技术[J]. 雷达学报, 2014, 3(6): 623–631. doi: 10.12000/JR14156WAN Xianrong, YI Jianxin, CHENG Feng, et al. Single frequency network based distributed passive radar technology[J]. Journal of Radars, 2014, 3(6): 623–631. doi: 10.12000/JR14156 [5] 万显荣. 基于低频段数字广播电视信号的外辐射源雷达发展现状与趋势[J]. 雷达学报, 2012, 1(2): 109–123. doi: 10.3724/SP.J.1300.2012.20027WAN Xianrong. An overview on development of passive radar based on the low frequency band digital broadcasting and TV signals[J]. Journal of Radars, 2012, 1(2): 109–123. doi: 10.3724/SP.J.1300.2012.20027 [6] GRIFFITHS H D and BAKER C J. An Introduction to Passive Radar[M]. Boston, US: Artech House, 2017. [7] O’HAGAN D W, PAINE S, and SCHÜPBACH C. Overview of electronic attacks against passive radar[C]. 2019 International Applied Computational Electromagnetics Society Symposium, Miami, USA, 2019: 1–2. [8] SCHUPBACH C, O’HAGAN D W, and PAINE S. Electronic attacks on DVB-T-based passive radar systems[C]. 2018 IEEE Radar Conference, Oklahoma City, USA, 2018: 1–6. doi: 10.1109/RADAR.2018.8378595. [9] PAINE S, O’HAGAN D W, INGGS M, et al. Evaluating the performance of FM-based PCL radar in the presence of jamming[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(2): 631–643. doi: 10.1109/TAES.2018.2858158 [10] SCHÜPBACH C and BÖNIGER U. Jamming of DAB-based passive radar systems[C]. 2016 European Radar Conference, London, UK, 2016: 1–4. [11] BAI Bowen, LIU Yanming, SONG Lihao, et al. Passive radar jamming: A novel method using time-varying plasma[J]. IEEE Access, 2019, 7: 120082–120088. doi: 10.1109/ACCESS.2019.2935514 [12] BAROTT W C and HIMED B. Cochannel interference in ATSC passive radar[C]. 2015 IEEE Radar Conference, Arlington, USA, 2015: 1–6. doi: 10.1109/RADAR.2015.7131190. [13] LYU Min, YI Jianxin, WAN Xianrong, et al. Cochannel interference in DTMB-based passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(5): 2138–2149. doi: 10.1109/TAES.2018.2882959 [14] WOJACZEK P, SUMMERS A, CRISTALLINI D, et al. Results of airborne PCL under CCI conditions using DVB-T illuminators of opportunity[C]. 2018 International Conference on Radar, Brisbane, Australia, 2018: 1–6. doi: 10.1109/RADAR.2018.8557280. [15] 吕晓德, 张汉良, 刘忠胜, 等. 基于LTE信号的外辐射源雷达同频基站干扰抑制方法研究[J]. 电子与信息学报, 2019, 41(9): 2123–2130. doi: 10.11999/JEIT180904LYU Xiaode, ZHANG Hanliang, LIU Zhongsheng, et al. Research on co-channel base station interference suppression method of passive radar based on LTE signal[J]. Journal of Electronics &Information Technology, 2019, 41(9): 2123–2130. doi: 10.11999/JEIT180904 [16] 吕晓德, 孙正豪, 刘忠胜, 等. 基于二阶统计量盲源分离算法的无源雷达同频干扰抑制研究[J]. 电子与信息学报, 2020, 42(5): 1288–1296. doi: 10.11999/JEIT190178LYU Xiaode, SUN Zhenghao, LIU Zhongsheng, et al. Research on suppressing co-channel interference of passive radar based on blind source separation using second order statistics[J]. Journal of Electronics &Information Technology, 2020, 42(5): 1288–1296. doi: 10.11999/JEIT190178 [17] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GB 20600-2006 数字电视地面广播传输系统帧结构、信道编码和调制[S]. 北京: 中国标准出版社, 2007.AQSIQ, Standardization Administration of China. GB 20600-2006 Framing structure, channel coding and modulation for digital television terrestrial broadcasting system[S]. Beijing: Standards Press of China, 2007. [18] ETSI E N. Digital video broadcasting (DVB): Frameing structure, channel coding and modulation for digital terrestrial television[J]. ETSI EN, 2004, 300(744): V1. [19] 国家广播电影电视总局. GY/T 220.1-2006 移动多媒体广播 第1部分: 广播信道帧结构、信道编码和调制[S]. 2006.SARFT. GY/T 220.1-2006 Mobile multimedia broadcasting Part 1: Framing structure channel coding and modulation for broadcasting channel[S]. 2006. [20] 国家广播电影电视总局. GY/T 220.2-2006 移动多媒体广播 第2部分: 复用[S]. 2006.SARFT. GY/T 220.2-2006 Mobile multimedia broadcasting Part 2: Multiplexing[S]. 2006. -

 下载:
下载:






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

