
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Through-wall Radar Target Localization Method Based on Dual-stream Temporal Spatial Feature Extraction and DETR
-
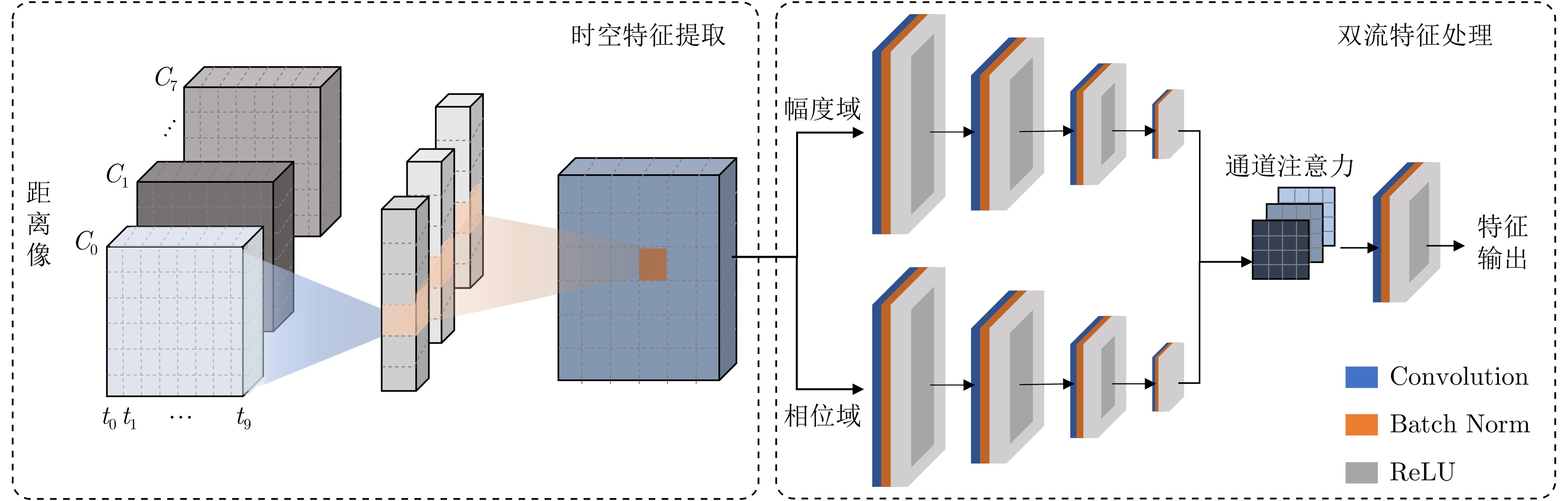
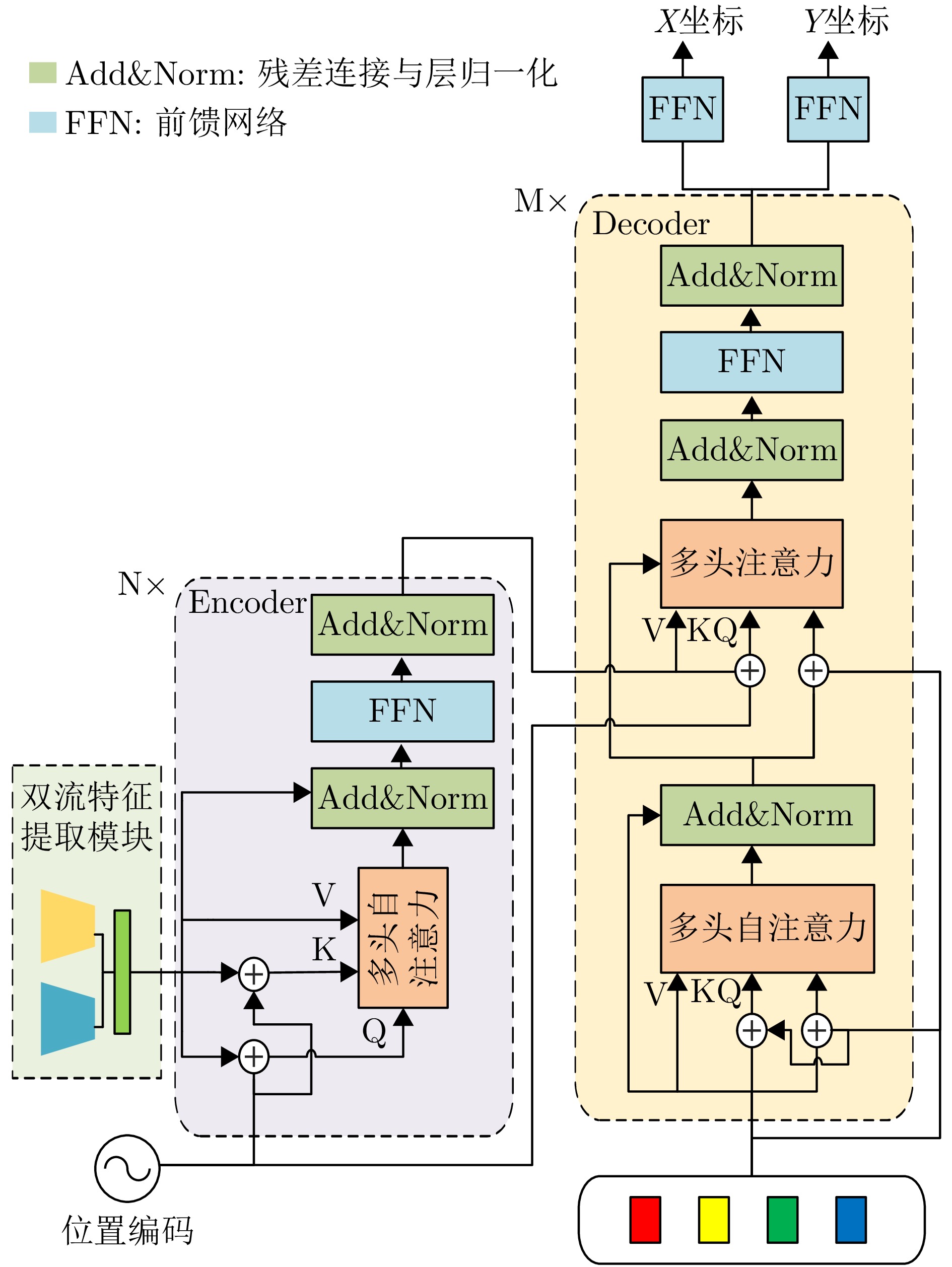
摘要: 穿墙人体目标定位在目标感知及救援等领域具有广泛的应用前景。然而超宽带穿墙雷达系统受到墙体杂波干扰导致目标回波特征模糊,传统方法难以在复杂环境下实现稳定的检测与高精度的定位。尽管基于深度学习的目标定位方法在复杂环境下表现出更优异的性能,但现有方案常依赖于分布式雷达布局,导致系统部署困难、算法实现复杂度高。为解决上述挑战,该研究基于单视角小孔径2发4收超宽带穿墙雷达,提出一种双流时空(DSTS)特征提取与DEtection TRansformer (DETR)的深度学习网络结构以实现对墙后人体目标位置的确定。该网络以复数距离像作为输入,对其进行时空特征提取并从中构建双流分支:相位域分支提取目标空间角度信息,而幅度域分支反映目标径向距离,从而充分挖掘回波中的目标距离与方位特征。随后,双流分支分别经过多尺度降采样,并引入通道注意力机制进行加权融合,以得到低维特征。最终,将所得低维特征加入位置编码,输入DETR网络中,利用其集合预测特性得到可靠目标定位结果。在实测数据上验证表明,所提方法在多目标且准确定位阈值设为0.7 m时平均精度可达0.79,性能优于4种现有方案。Abstract: Through-wall human target localization has broad application prospects in fields such as target perception and rescue. However, ultra-wideband through-wall radar systems suffer from wall clutter interference, which distorts target echo features and complicates the ability of traditional methods to achieve stable detection and high-precision localization in complex environments. Although deep learning-based localization methods have shown superior performance in these environments, they often rely on distributed radar layouts, leading to difficulties in system deployment and increased algorithm complexity. To address these challenges, this study introduces a deep learning network framework that utilizes a single-view small-aperture dual-transmitter quad-receiver ultra-wideband through-wall radar. This framework combines Dual-Stream Temporal Spatial (DSTS) feature extraction with a DEtection TRansformer (DETR) to accurately locate human targets behind walls. The network processes complex-range images as input, extracts spatiotemporal features, and constructs dual streams. The phase branch captures the target’s spatial angular information, and the amplitude branch reflects the target’s radial distance, thereby fully exploiting the distance and azimuth features in the echoes. The dual streams then undergo multi-scale downsampling, and a channel attention mechanism is employed for weighted fusion, yielding low-dimensional features. These features are then enhanced with positional encoding and fed into the DETR network, which utilizes its set-prediction capabilities to deliver reliable target localization results. Validation on measured data demonstrates that the proposed method achieves an average precision of 0.79, with a threshold for accurate multi-object localization set at 0.7 m, thus outperforming several existing solutions.
-
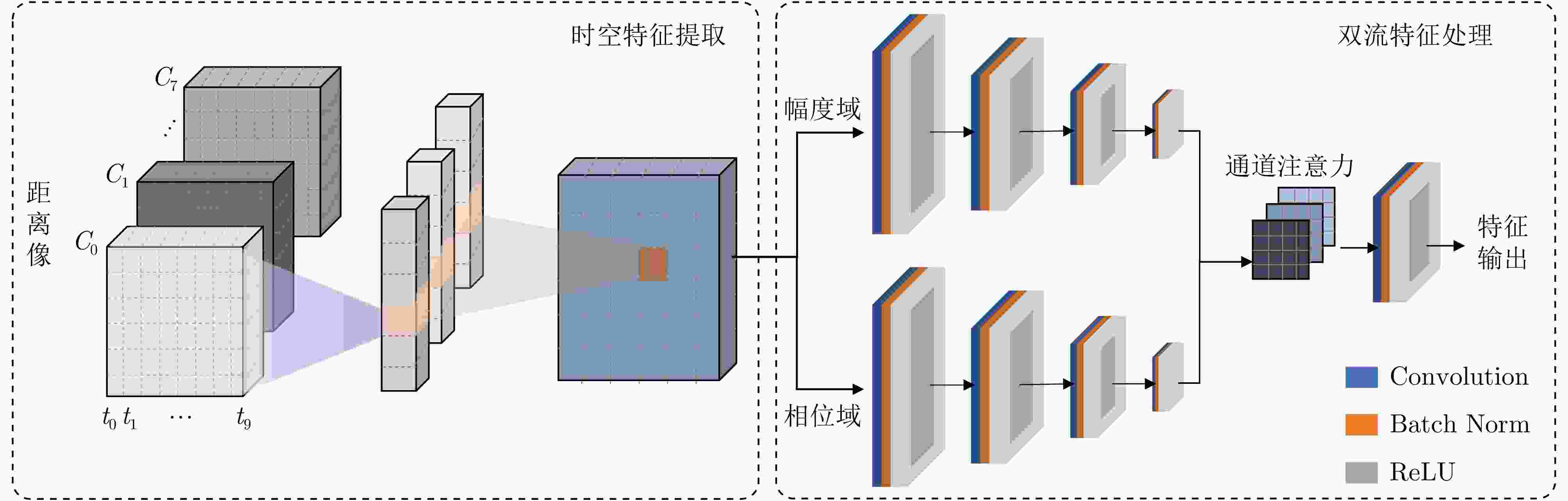
图 3 双流时空特征提取模块
Figure 3. Dual-Stream Temporal Spatial (DSTR) feature extraction module
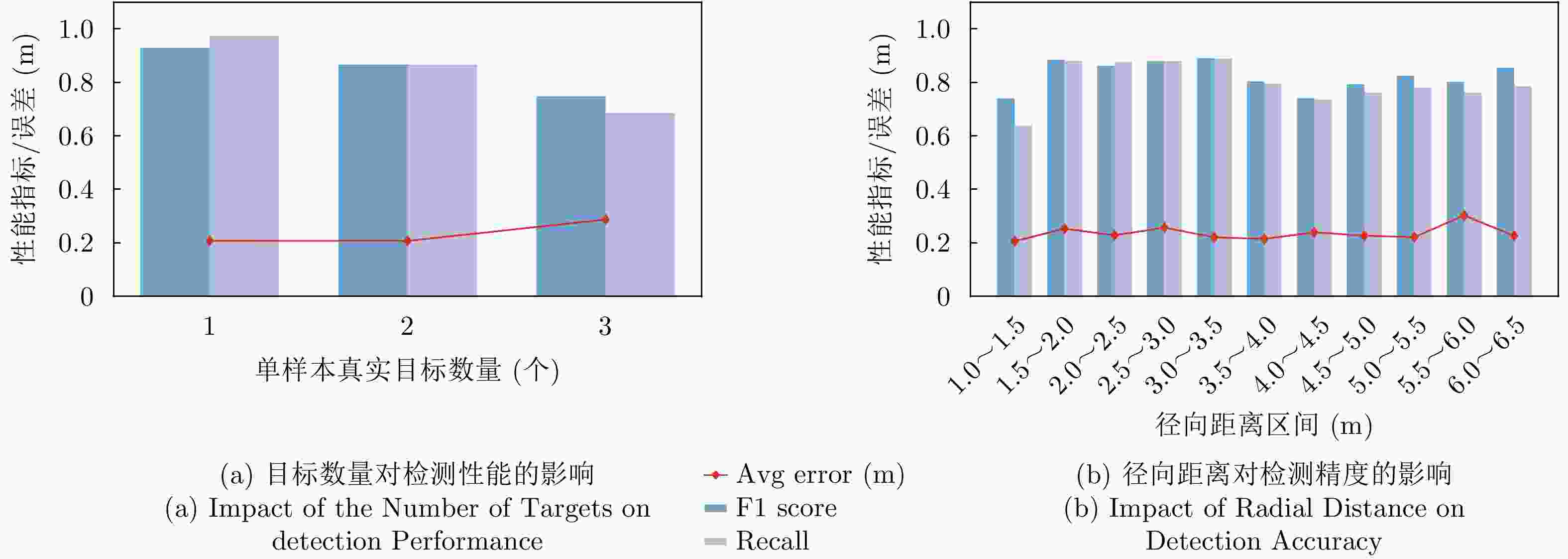
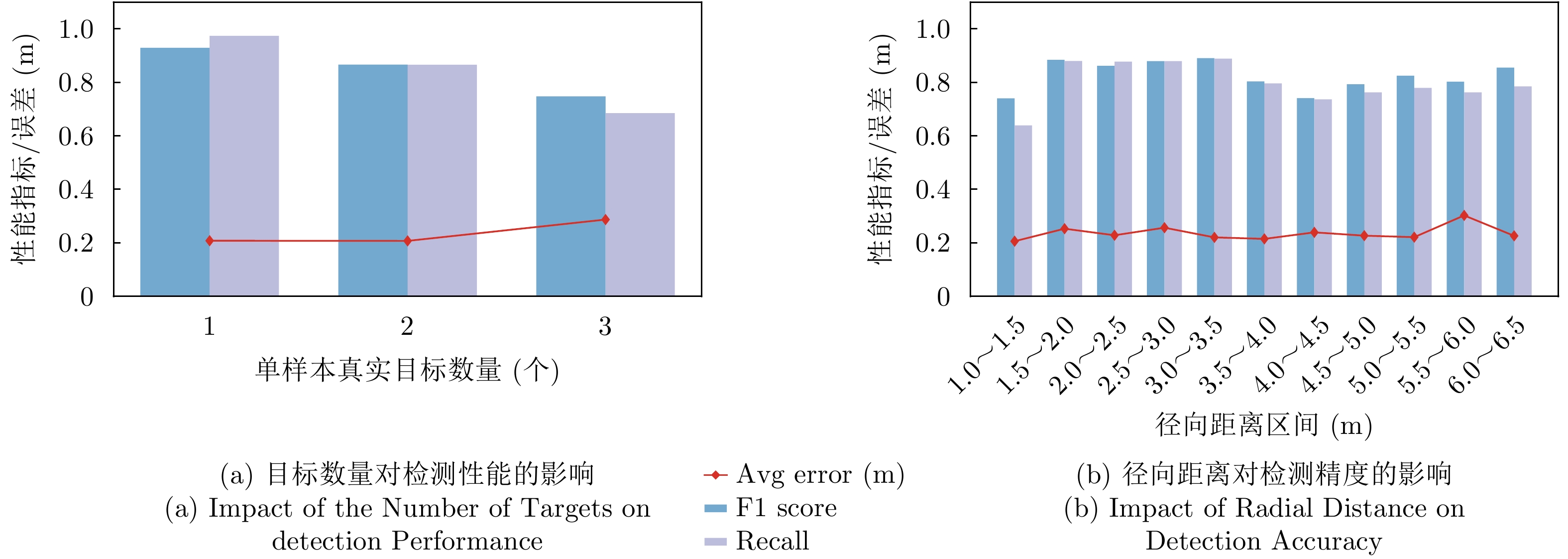
图 7 0.7 m阈值下不同目标数目及不同径向距离下模型性能变化统计
Figure 7. Statistics of model performance changes under different numbers of targets and various radial distances under 0.7 m threshold
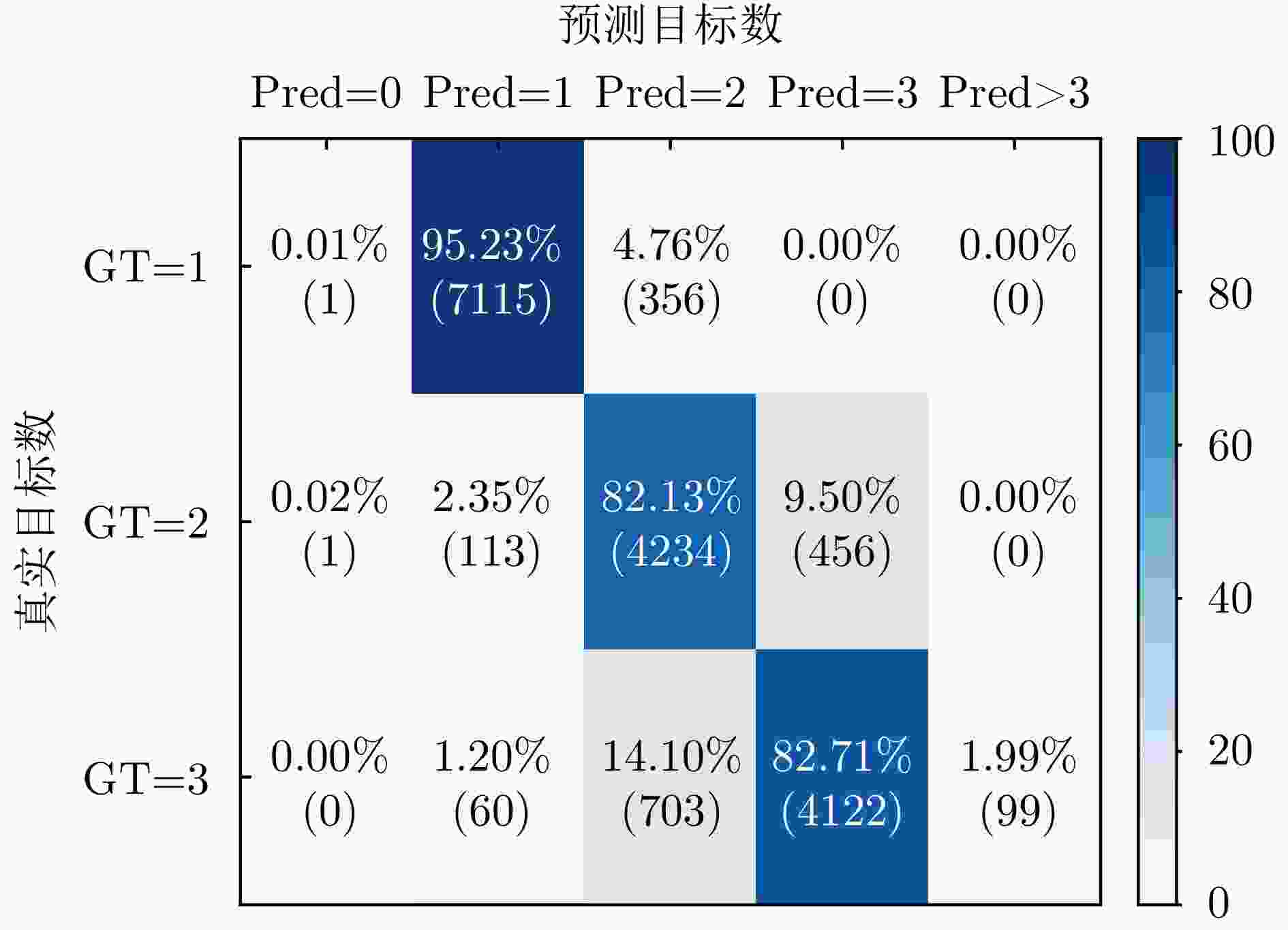
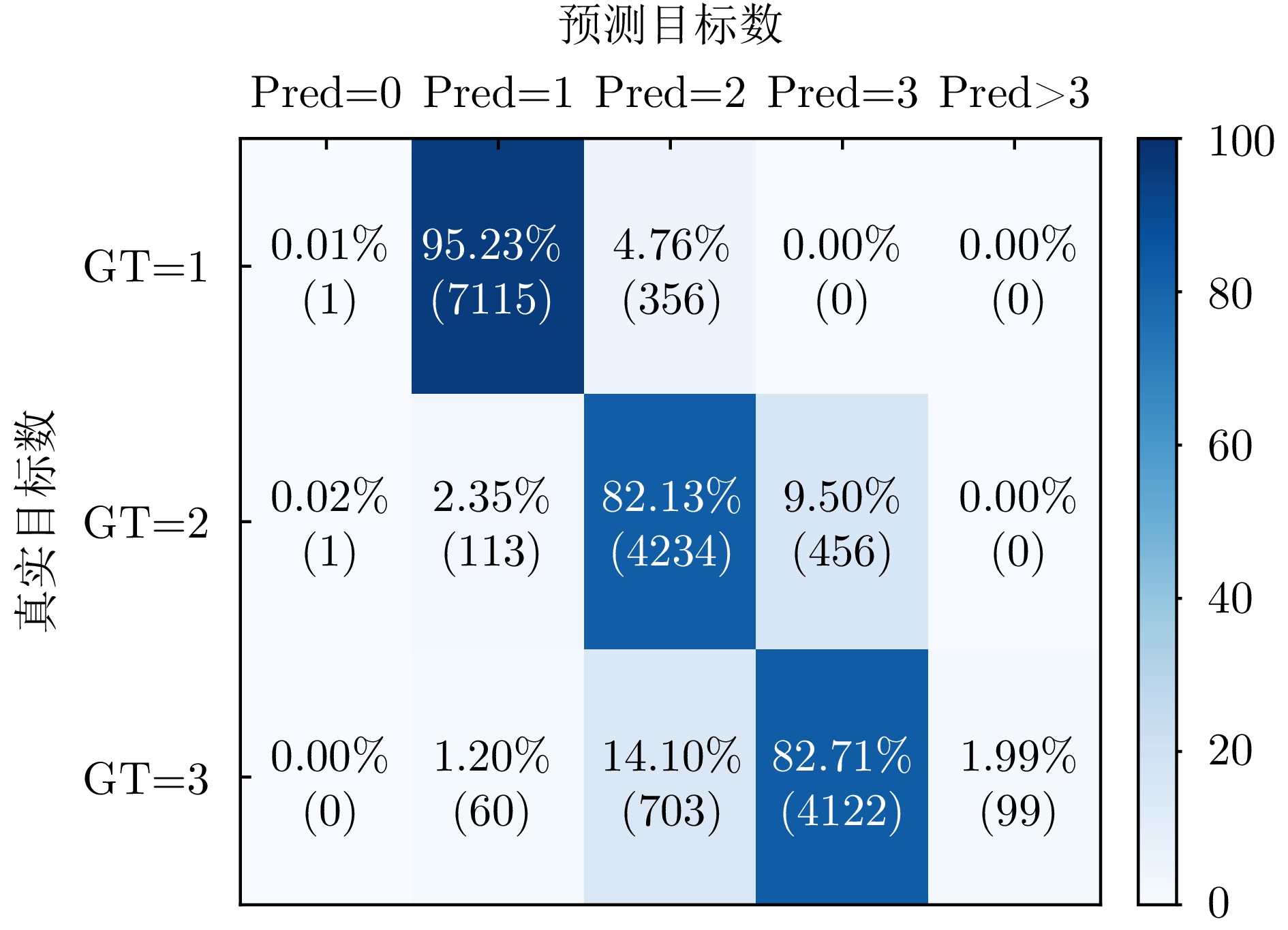
图 8 多目标情形下真实目标数目与预测目标数
Figure 8. Statistics of predicted target numbers versus ground-truth target numbers in multi-target cases
表 1 DSTS特征提取模块网络结构参数详情
Table 1. Details of the network structure parameters of the DSTS feature extraction module
模块阶段 操作层 参数配置
(k: kernel, s: stride, p: padding)输出尺寸$ C\times H\times W $ 输入 复数雷达距离像 - $ 8\times 89\times 10 $ 时空特征提取 ST-Conv (实部) $ k=3\times 10,s=1,p=(1,0) $ $ 89\times 89\times 1 $ ST-Conv (虚部) 维度重塑 维度变换(Reshape) $ \text{Squeeze}(3)\rightarrow \text{Unsqueeze}(1) $ $ 1\times 89\times 89 $ 幅/相特征映射 2D CNN (幅度域分支) $ k=3\times 10,s=1,p=1 $ $ 8\times 89\times 89 $ 2D CNN (相位域分支) 双流特征处理 2D CNN $ {C}_{\rm{in}}=8,{C}_{\rm{out}}=16,k=3\times 3,s=2,p=1 $ $ 16\times 45\times 45 $ 2D CNN $ {C}_{\rm{in}}=16,{C}_{\rm{out}}=32,k=3\times 3,s=2,p=1 $ $ 32\times 23\times 23 $ 2D CNN $ {C}_{\rm{in}}=32,{C}_{\rm{out}}=64,k=3\times 3,s=2,p=1 $ $ 64\times 12\times 12 $ 2D CNN $ {C}_{\rm{in}}=64,{C}_{\rm{out}}=128,k=3\times 3,s=2,p=1 $ $ 128\times 6\times 6 $ 特征融合 通道注意力融合 Concat + SE Attention + Conv $ 128\times 6\times 6 $  下载: 导出CSV
下载: 导出CSV
表 2 实验评估结果对比
Table 2. Comparison of experimental evaluation results
模型配置 目标情形 阈值=0.7 m 阈值=0.5 m GFLOPS Err (m) F1 AP R Err (m) F1 AP R 文献[25]所提方案 单目标 0.37 0.75 0.76 0.81 0.30 0.63 0.62 0.68 0.24 多目标 0.41 0.46 0.44 0.49 0.44 0.43 0.41 0.47 成像[38]+CA-CFAR 单目标 0.35 - - 0.78 0.31 - - 0.63 - 多目标 0.39 - - 0.75 0.32 - - 0.61 成像[38]+YOLOv8 单目标 0.21 0.85 0.86 0.84 0.20 0.83 0.85 0.81 8.20 多目标 0.24 0.69 0.72 0.68 0.21 0.65 0.67 0.62 文献[30]所提方案 单目标 0.22 0.86 0.72 0.87 0.19 0.82 0.72 0.82 0.15 多目标 0.24 0.72 0.73 0.74 0.21 0.66 0.61 0.67 本文方案 单目标 0.29 0.93 0.95 0.97 0.19 0.88 0.87 0.92 12.16 多目标 0.23 0.85 0.79 0.86 0.20 0.77 0.67 0.76
下载: 导出CSV
表 3 消融实验结果补充表注
Table 3. Ablation study results
组件配置 目标
情形阈值=0.7 m 阈值=0.5 m DSTS DETR Err (m) F1 AP R Err (m) F1 AP R - - 单目标 0.47 0.72 0.76 0.81 0.39 0.65 0.69 0.76 多目标 0.53 0.41 0.41 0.45 0.42 0.39 0.38 0.42 - √ 单目标 0.42 0.81 0.82 0.89 0.35 0.68 0.63 0.71 多目标 0.47 0.61 0.59 0.67 0.45 0.54 0.51 0.60 √ - 单目标 0.38 0.78 0.82 0.83 0.29 0.65 0.70 0.73 多目标 0.50 0.39 0.39 0.43 0.48 0.36 0.37 0.43 √ √ 单目标 0.20 0.93 0.95 0.97 0.19 0.88 0.87 0.92 多目标 0.23 0.85 0.79 0.86 0.20 0.77 0.67 0.76
下载: 导出CSV
表 4 双流特征处理消融实验结果补充表注
Table 4. Ablation study results of dual-stream features processing
组件配置 目标
情形阈值=0.7 m 阈值=0.5 m 幅度域分支 相位域分支 Err (m) F1 AP R Err (m) F1 AP R - - 单目标 0.24 0.79 0.88 0.90 0.22 0.74 0.70 0.86 多目标 0.27 0.78 0.71 0.79 0.23 0.69 0.57 0.69 √ - 单目标 0.23 0.81 0.88 0.91 0.20 0.73 0.73 0.87 多目标 0.25 0.76 0.75 0.81 0.24 0.71 0.61 0.72 - √ 单目标 0.22 0.84 0.90 0.91 0.23 0.78 0.81 0.87 多目标 0.26 0.79 0.74 0.81 0.24 0.71 0.60 0.71 √ √ 单目标 0.20 0.93 0.95 0.97 0.19 0.88 0.87 0.92 多目标 0.23 0.85 0.79 0.86 0.20 0.77 0.67 0.76
下载: 导出CSV
表 5 Encoder层数与查询数量消融实验结果补充表注
Table 5. Ablation study results on the number of encoder layers and query numbers
Encoder
层数查询
数量阈值=0.7 m 阈值=0.5 m AP R AP R 3层 100 0.62 0.72 0.41 0.53 50 0.71 0.78 0.55 0.68 4层 100 0.63 0.71 0.54 0.67 50 0.79 0.86 0.67 0.76 5层 100 0.44 0.52 0.31 0.42 50 0.72 0.78 0.56 0.67 6层 100 0.43 0.53 0.32 0.47 50 0.73 0.79 0.54 0.66
下载: 导出CSV
-
[1] 王增福, 邵毅, 祁登亮, 等. 一种基于一致性的分布式天基雷达组网空中目标高度估计与定位方法[J]. 雷达学报, 2023, 12(6): 1249–1262. doi: 10.12000/JR23157.WANG Zengfu, SHAO Yi, QI Dengliang, et al. Consistency-based air target height estimation and location in distributed space-based radar network[J]. Journal of Radars, 2023, 12(6): 1249–1262. doi: 10.12000/JR23157. [2] 朱丹, 徐威远, 陈文娟, 等. 基于光波分复用网络的分布式多目标定位系统[J]. 雷达学报, 2019, 8(2): 171–177. doi: 10.12000/JR19028.ZHU Dan, XU Weiyuan, CHEN Wenjuan, et al. Distributed multi-target localization system based on optical wavelength division multiplexing network[J]. Journal of Radars, 2019, 8(2): 171–177. doi: 10.12000/JR19028. [3] 蒋留兵, 张泽, 车俐, 等. 基于合成双基地毫米波雷达的非视距目标定位方法[J]. 火力与指挥控制, 2025, 50(7): 120–124, 132. doi: 10.3969/j.issn.1002-0640.2025.07.016.JIANG Liubing, ZHANG Ze, CHE Li, et al. A non-line-of-sight target localization method based on synthetic dual-base millimeter-wave radar[J]. Fire Control & Command Control, 2025, 50(7): 120–124, 132. doi: 10.3969/j.issn.1002-0640.2025.07.016. [4] 郭紫祎, 张红娟, 赵智博, 等. 基于路侧激光雷达的车辆目标跟踪与定位[J]. 测绘通报, 2024(12): 84–89. doi: 10.13474/j.cnki.11-2246.2024.1213.GUO Ziyi, ZHANG Hongjuan, ZHAO Zhibo, et al. Vehicle target tracking and positioning based on roadside LiDAR[J]. Bulletin of Surveying and Mapping, 2024(12): 84–89. doi: 10.13474/j.cnki.11-2246.2024.1213. [5] 陈锐志, 叶锋. 基于Wi-Fi信道状态信息的室内定位技术现状综述[J]. 武汉大学学报(信息科学版), 2018, 43(12): 2064–2070. doi: 10.13203/j.whugis20180176.CHEN Ruizhi and YE Feng. An overview of indoor positioning technology based on Wi-Fi channel state information[J]. Geomatics and Information Science of Wuhan University, 2018, 43(12): 2064–2070. doi: 10.13203/j.whugis20180176. [6] 毛东方, 蒋国平. 基于UKF的蓝牙-PDR多传感器融合室内定位算法[J]. 计算机科学, 2025, 52(S2): 250100083. doi: 10.11896/jsjkx.250100083.MAO Dongfang and JIANG Guoping. Bluetooth-PDR multi-sensor fusion indoor positioning method based on UKF[J]. Computer Science, 2025, 52(S2): 250100083. doi: 10.11896/jsjkx.250100083. [7] SEYFIOĞLU M S, GÜRBÜZ S Z, ÖZBAYOĞLU A M, et al. Deep learning of micro-Doppler features for aided and unaided gait recognition[C]. 2017 IEEE Radar Conference (RadarConf), Seattle, USA, 2017: 1125–1130. doi: 10.1109/RADAR.2017.7944373. [8] 夏正欢, 张群英, 叶盛波, 等. 一种便携式伪随机编码超宽带人体感知雷达设计[J]. 雷达学报, 2015, 4(5): 527–537. doi: 10.12000/JR15027.XIA Zhenghuan, ZHANG Qunying, YE Shengbo, et al. Design of a handheld pseudo random coded UWB radar for human sensing[J]. Journal of Radars, 2015, 4(5): 527–537. doi: 10.12000/JR15027. [9] 金添, 宋勇平. 超宽带雷达建筑物结构稀疏成像[J]. 雷达学报, 2018, 7(3): 275–284. doi: 10.12000/JR18031.JIN Tian and SONG Yongping. Sparse imaging of building layouts in ultra-wideband radar[J]. Journal of Radars, 2018, 7(3): 275–284. doi: 10.12000/JR18031. [10] FARWELL M, ROSS J, LUTTRELL R, et al. Sense through the wall system development and design considerations[J]. Journal of the Franklin Institute, 2008, 345(6): 570–591. doi: 10.1016/j.jfranklin.2008.01.004. [11] HARIKESH, CHAUHAN S S, BASU A, et al. Through the wall human subject localization and respiration rate detection using multichannel Doppler radar[J]. IEEE Sensors Journal, 2021, 21(2): 1510–1518. doi: 10.1109/JSEN.2020.3016755. [12] PRASAD M S and PANIGRAHI T. Distributed maximum likelihood DOA estimation algorithm for correlated signals in wireless sensor network[J]. Wireless Personal Communications, 2019, 105(4): 1527–1544. doi: 10.1007/s11277-019-06158-8. [13] KUNDU D. Modified MUSIC algorithm for estimating DOA of signals[J]. Signal Processing, 1996, 48(1): 85–90. doi: 10.1016/0165-1684(95)00126-3. [14] ZHU Zhihao, GUO Shisheng, CHEN Jiahui, et al. Non-line-of-sight targets localization algorithm via joint estimation of DoD and DoA[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 8506311. doi: 10.1109/TIM.2023.3323003. [15] ZHANG Ying and NG B P. MUSIC-like DOA estimation without estimating the number of sources[J]. IEEE Transactions on Signal Processing, 2010, 58(3): 1668–1676. doi: 10.1109/TSP.2009.2037074. [16] ZHANG Huamei, ZHOU Sheng, XU Cheng, et al. A real-time automatic method for target locating under unknown wall characteristics in through-wall imaging[J]. Progress in Electromagnetics Research M, 2020, 89: 189–197. doi: 10.2528/PIERM19111101. [17] 刘新, 朱海滨, 刘宗强, 等. 分布式无线组网超宽带穿墙雷达系统设计与联合定位[J]. 雷达学报(中英文), 2024, 13(4): 747–760. doi: 10.12000/JR23239.LIU Xin, ZHU Haibin, LIU Zongqiang, et al. The design and joint positioning method of an ultra-wideband through-wall radar system for distributed wireless networking[J]. Journal of Radars, 2024, 13(4): 747–760. doi: 10.12000/JR23239. [18] 柳景斌, 王泽民, 吕轩凡, 等. 低成本毫米波雷达的室内自定位方法[J]. 武汉大学学报(信息科学版), 2023, 48(9): 1399–1408. doi: 10.13203/j.whugis20210593.LIU Jingbin, WANG Zemin, LÜ Xuanfan, et al. Indoor ego-localization method for low cost millimeter wave radar[J]. Geomatics and Information Science of Wuhan University, 2023, 48(9): 1399–1408. doi: 10.13203/j.whugis20210593. [19] LEIGSNERING M, AMIN M, AHMAD F, et al. Multipath exploitation and suppression for SAR imaging of building interiors: An overview of recent advances[J]. IEEE Signal Processing Magazine, 2014, 31(4): 110–119. doi: 10.1109/MSP.2014.2312203. [20] SOLIMENE R, CATAPANO I, GENNARELLI G, et al. SAR imaging algorithms and some unconventional applications: A unified mathematical overview[J]. IEEE Signal Processing Magazine, 2014, 31(4): 90–98. doi: 10.1109/MSP.2014.2311271. [21] LI Huquan, CUI Guolong, GUO Shisheng, et al. Target tracking and ghost mitigation based on multi-view through-the-wall radar imaging[C]. 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 2020: 1–5. doi: 10.1109/RadarConf2043947.2020.9266680. [22] BREHIER H, BRELOY A, REN Chengfang, et al. Through the wall radar imaging via Kronecker-structured Huber-type RPCA[J]. Signal Processing, 2024, 214: 109228. doi: 10.1016/j.sigpro.2023.109228. [23] 汤寓麟, 李厚朴, 张卫东, 等. 侧扫声纳检测沉船目标的轻量化DETR-YOLO法[J]. 系统工程与电子技术, 2022, 44(8): 2427–2436. doi: 10.12305/j.issn.1001-506X.2022.08.06.TANG Yulin, LI Houpu, ZHANG Weidong, et al. Lightweight DETR-YOLO method for detecting shipwreck target in side-scan sonar[J]. Systems Engineering and Electronics, 2022, 44(8): 2427–2436. doi: 10.12305/j.issn.1001-506X.2022.08.06. [24] 皮任东. 基于路侧激光雷达和摄像头融合的目标轨迹追踪方法研究[D]. [硕士论文] 山东大学, 2022. doi: 10.27272/d.cnki.gshdu.2022.005895.PI Rendong. Research on object tracking method based on fusion of roadside LiDAR and camera[D]. [Mader disetatia], Shandong University, 2022. doi: 10.27272/d.cnki.gshdu.2022.005895. [25] LEE J, PARK K, and KIM Y. Deep learning-based device-free localization scheme for simultaneous estimation of indoor location and posture using FMCW radars[J]. Sensors, 2022, 22(12): 4447. doi: 10.3390/s22124447. [26] STEPHAN M, SANTRA A, and FISCHER G. Human Target Detection and Localization with Radars Using Deep Learning[M]. WANI M A, KHOSHGOFTAAR T M, and PALADE V. Deep Learning Applications. Singapore: Springer, 2020: 173–197. doi: 10.1007/978-981-15-6759-9_8. [27] GHORBANI F and SOLEIMANI H. Through-the-wall radar under electromagnetic complex wall: A deep learning approach[J]. Results in Applied Mathematics, 2023, 17: 100354. doi: 10.1016/j.rinam.2022.100354. [28] GHORBANI F and SOLEIMANI H. Simultaneous estimation of wall and object parameters in TWR using deep neural network[J]. International Journal of Antennas and Propagation, 2022, 2022: 7810213. doi: 10.1155/2022/7810213. [29] 赵思肖, 梁步阁, 杨德贵, 等. 基于Faster RCNN的IR-UWB穿墙雷达邻近多目标检测算法[J]. 无线电工程, 2023, 53(1): 80–86. doi: 10.3969/j.issn.1003-3106.2023.01.011.ZHAO Sixiao, LIANG Buge, YANG Degui, et al. Multiple adjacent targets detection algorithm for IR-UWB through-wall radar based on Faster-RCNN[J]. Radio Engineering, 2023, 53(1): 80–86. doi: 10.3969/j.issn.1003-3106.2023.01.011. [30] ZHU Dongsheng, WANG Changlong, HAN Chong, et al. TWLBR: Multi-human through-wall localization and behavior recognition based on MIMO radar[C]. GLOBECOM 2022-2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 2022: 3186–3191. doi: 10.1109/GLOBECOM48099.2022.10001129. [31] 渠晓东, 王文远, 孟昊宇, 等. 基于鲁棒主成分分析及YOLOv8的穿墙雷达运动人员检测方法[J]. 信号处理, 2025, 41(8): 1390–1403. doi: 10.12466/xhcl.2025.08.008.QU Xiaodong, WANG Wenyuan, MENG Haoyu, et al. Moving human detection method in through-the-wall radar based on robust principal component analysis and YOLOv8[J]. Journal of Signal Processing, 2025, 41(8): 1390–1403. doi: 10.12466/xhcl.2025.08.008. [32] 王明阳. 穿墙雷达人体行为识别方法研究[D]. [博士论文] 电子科技大学, 2019.WANG Mingyang. Research on human action recognition exploiting through-wall radar[D]. [Ph. D. disserta]: University of Electronic Science and Technology of China, 2019. [33] CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[C]. The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 213–229. doi: 10.1007/978-3-030-58452-8_13. [34] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. The 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 6000–6010. [35] HE Kaiming, ZAHNG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. The IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770–778. doi: 10.1109/CVPR.2016.90. [36] BA J L, KIROS J R, and HINTON G E. Layer normalization[EB/OL]. arXiv: 1607.06450, 2016. doi: 10.48550/arXiv.1607.06450. [37] GIRSHICK R. Fast R-CNN[C]. The IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 1440–1448. doi: 10.1109/ICCV.2015.169. [38] CUI Guolong, KONG Lingjiang, and YANG Jianyu. A back-projection algorithm to stepped-frequency synthetic aperture through-the-wall radar imaging[C]. The 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 2007: 123–126. doi: 10.1109/APSAR.2007.4418570. -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

