
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Architecture and Key Technologies of a Low-altitude Active Perception Network Based on the Digital Retina
-
摘要: 低空智能感知技术旨在将低空目标与环境的物理空间转化为可计算的数字空间,是支撑低空经济活动安全有序开展的基础。该文系统分析了当前低空场景下大规模视觉感知、目标感知以及环境感知等技术的发展现状与面临的挑战。针对现有挑战,该文提出了基于数字视网膜端边云协同架构的低空主动感知网,并从整体网络架构、云侧基础模型底座、端侧目标与环境感知技术等维度,详细阐述了其核心机制与关键技术。最后,通过初步实验,验证了该文所提感知网络在空地带宽受限条件下实现高效协同感知计算的有效性。Abstract: Low-altitude perception technology aims to transform the physical space of low-altitude targets and environments into a computable digital space, providing a foundation for the safe and organized development of low-altitude economic activities. This paper systematically examines the current progress and challenges of technologies such as large-scale visual perception, object detection, and environmental sensing in low-altitude scenarios. To address these challenges, we introduce a low-altitude active perception network based on the digital retina featuring a collaborative architecture that integrates end, edge, and cloud computing. The key mechanisms and methods are outlined across various aspects, including the overall network structure, cloud-based foundation models, and end-based object and environmental perception technologies. Early applications and experimental results confirm the effectiveness of the proposed network in enabling efficient joint perception under bandwidth limitations.
-
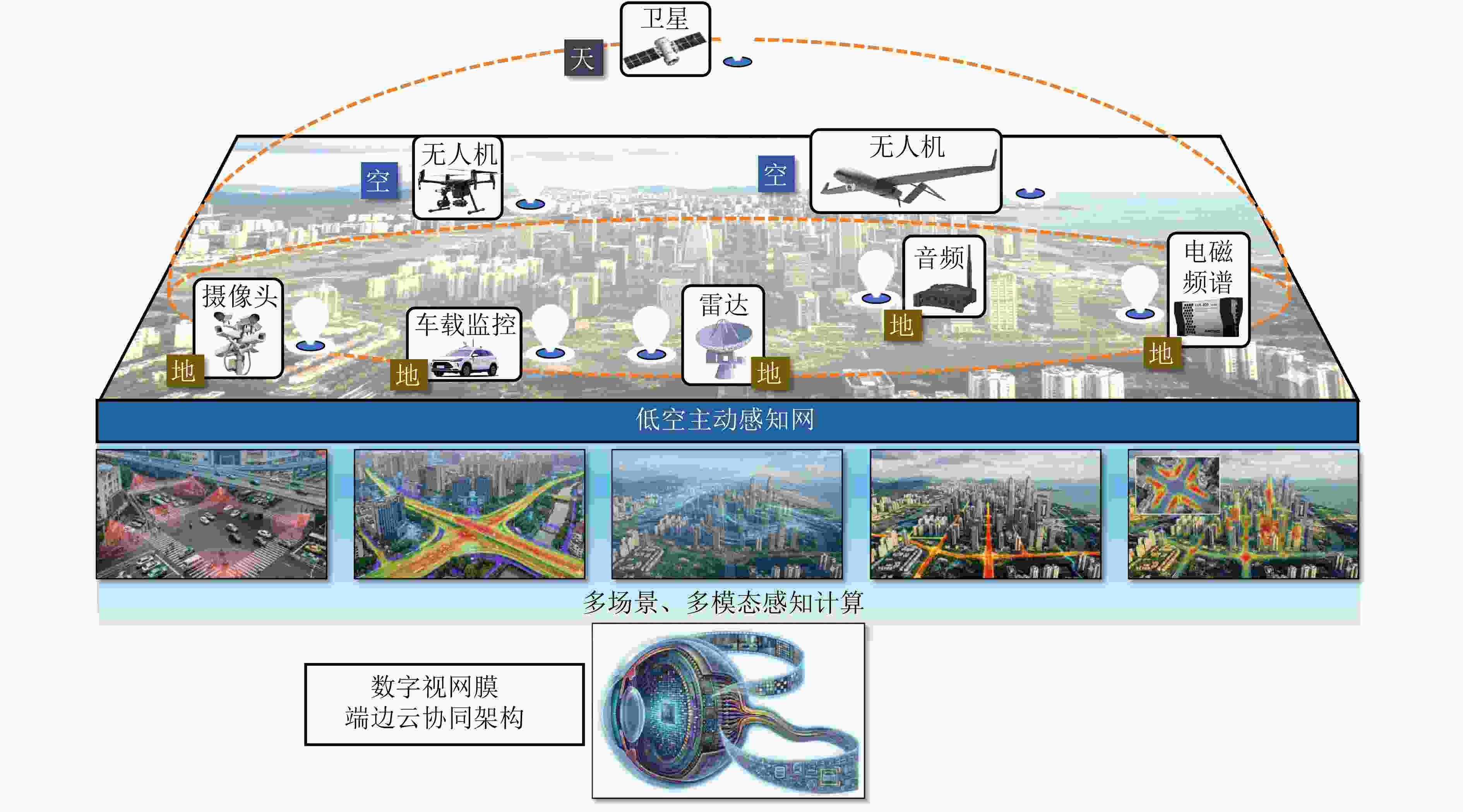
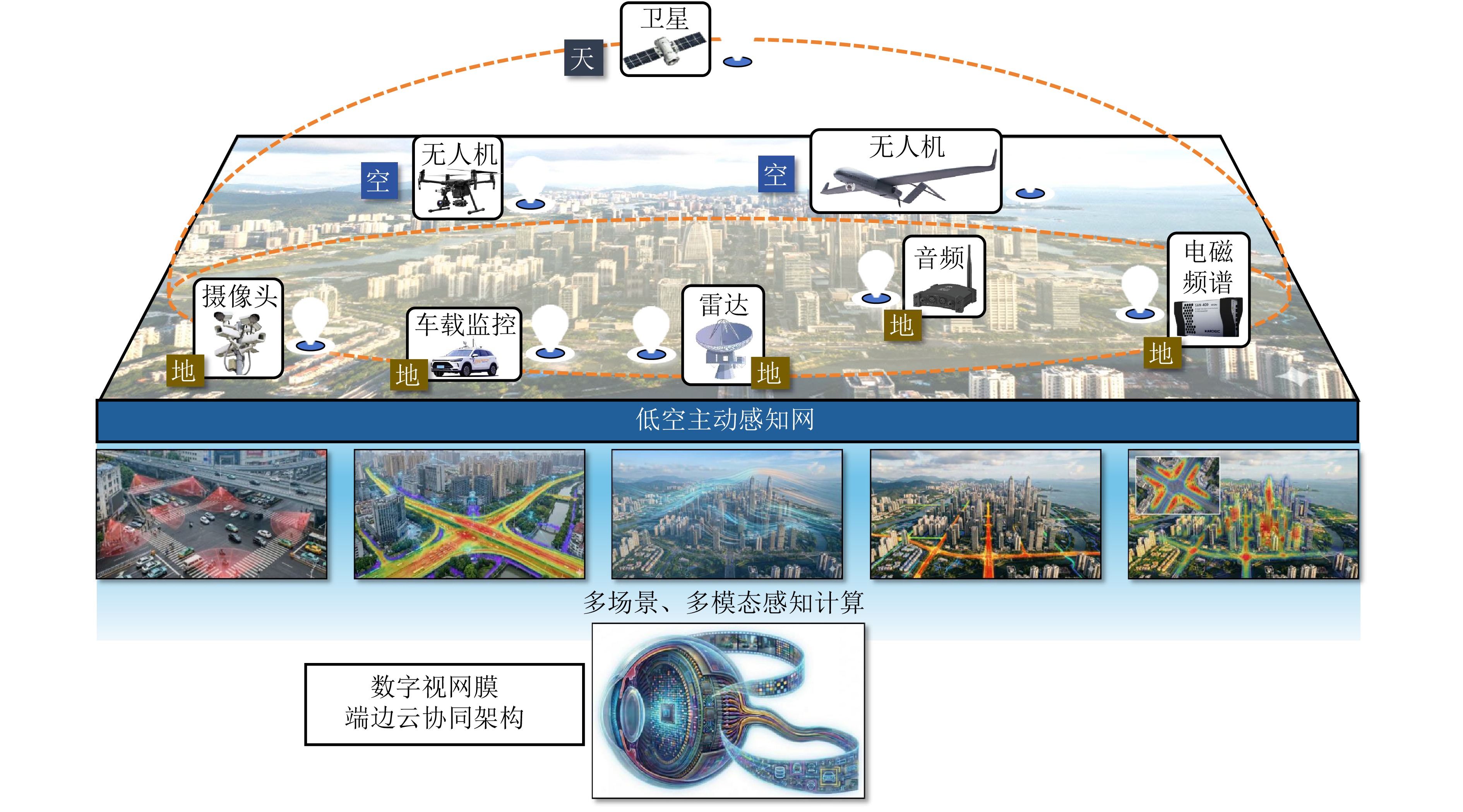
图 1 基于数字视网膜的低空主动感知网
Figure 1. The digital retina-based active perception network for low-altitude airspace
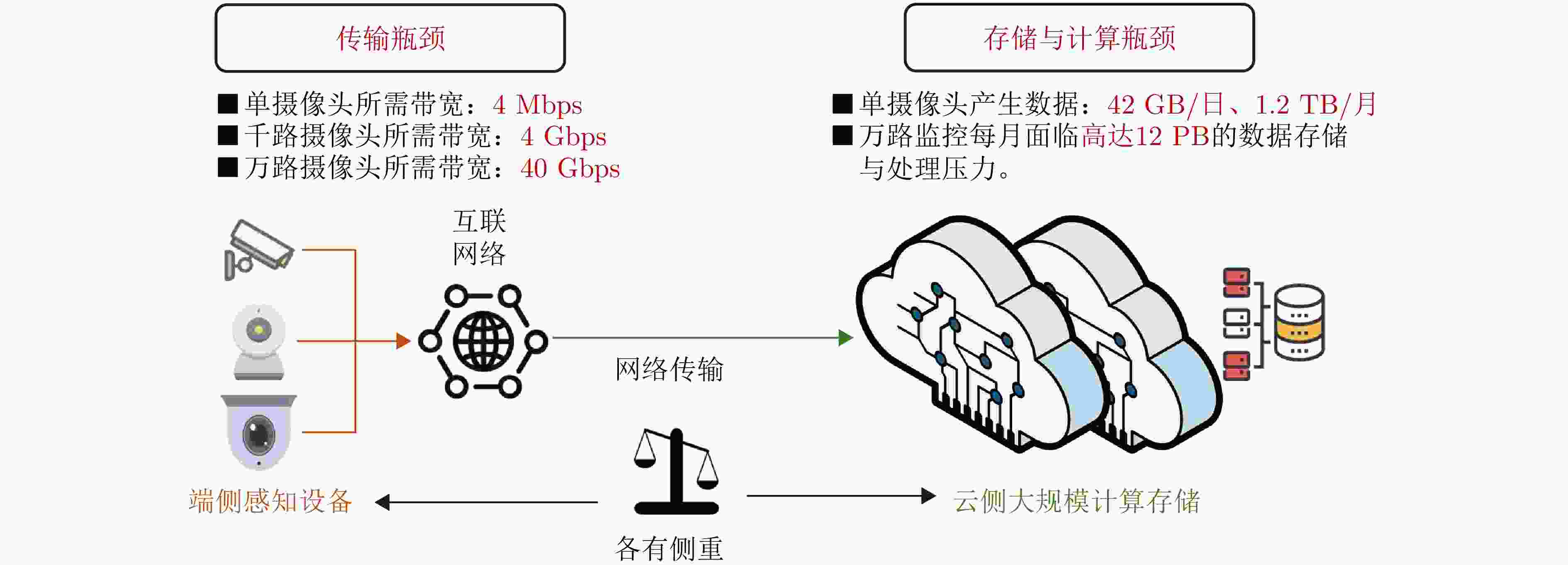
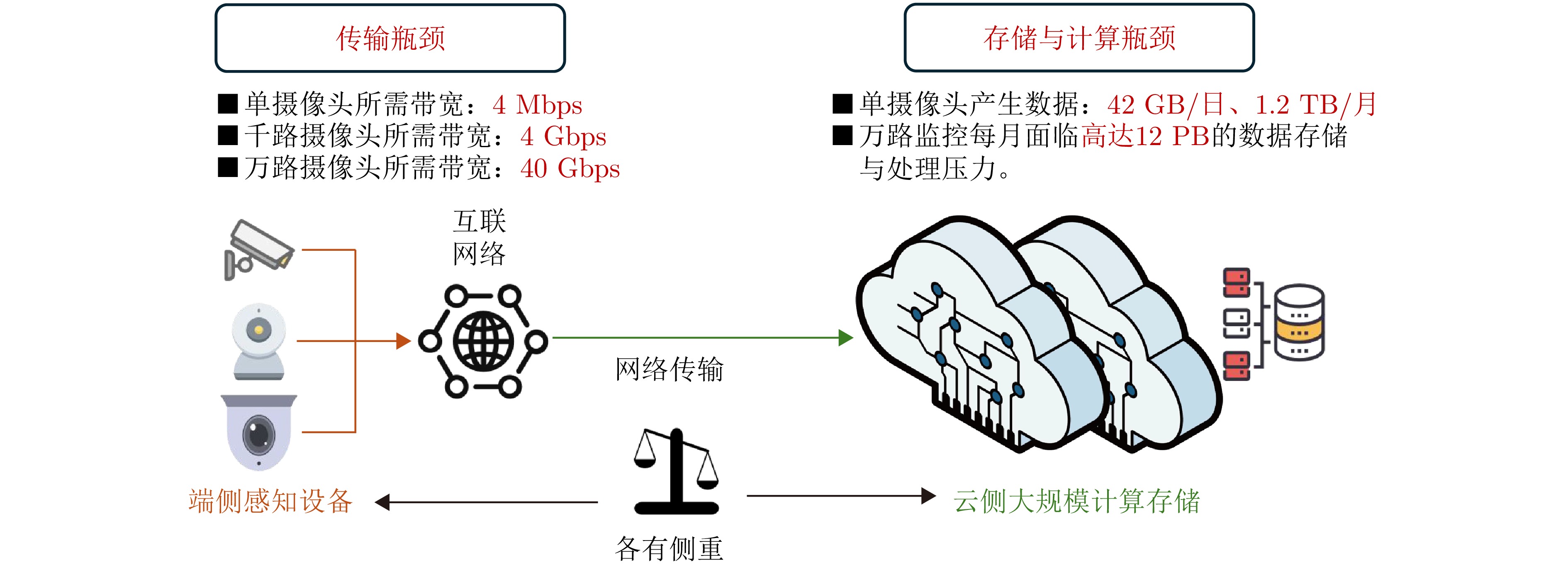
图 2 云侧感知和端侧感知两类范式及其面临的瓶颈
Figure 2. The cloud-based and edge-based perception paradigms and their respective bottlenecks
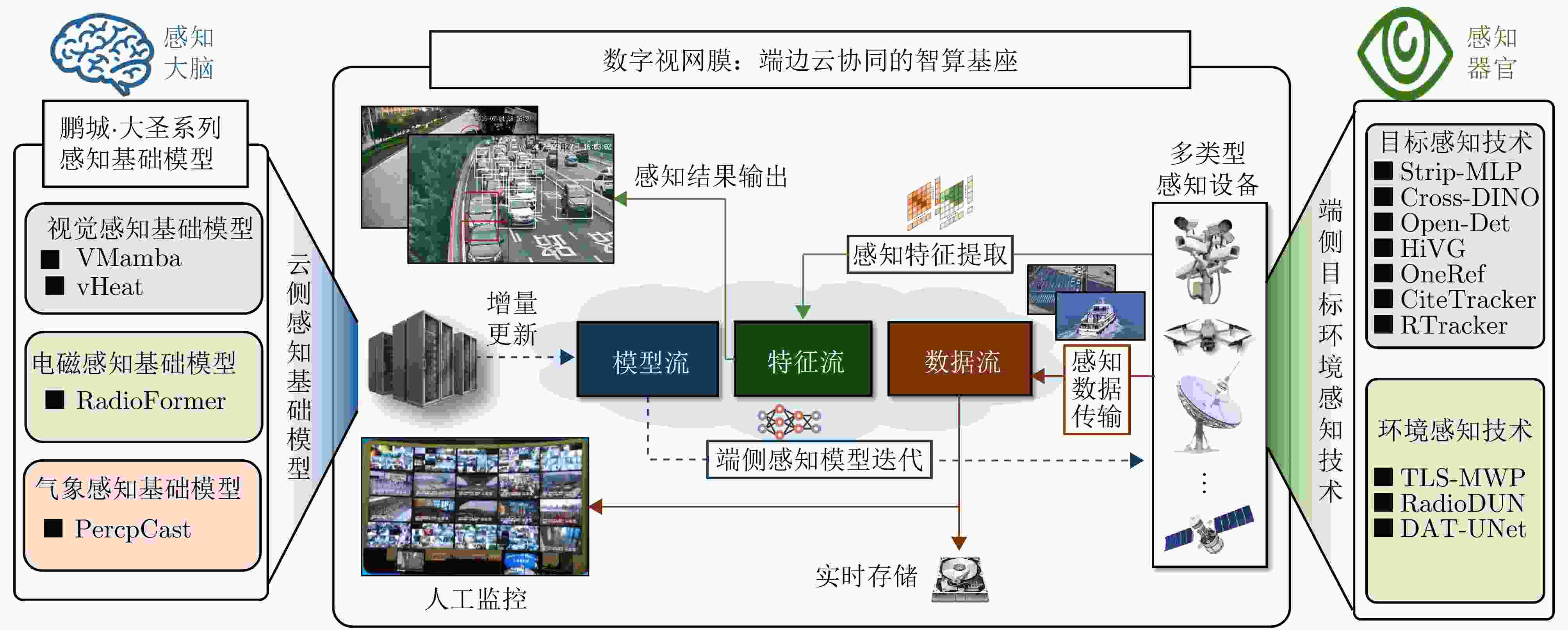
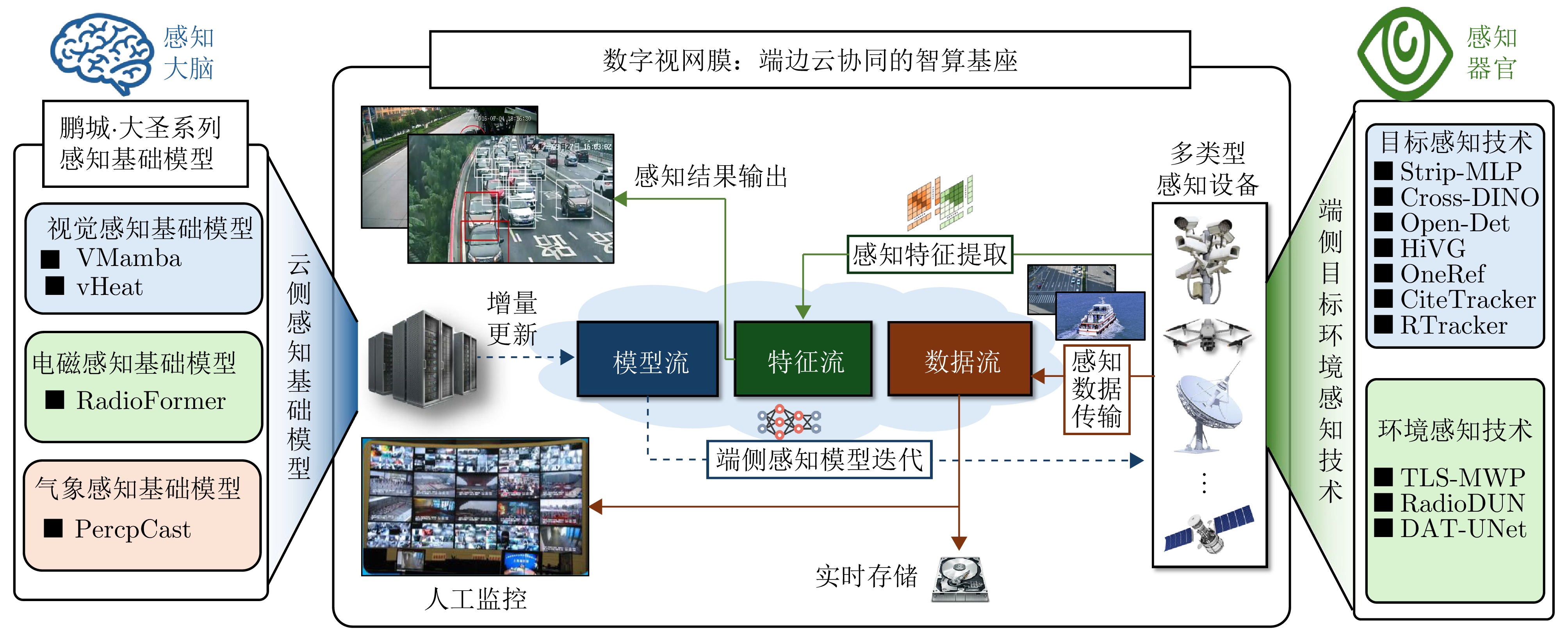
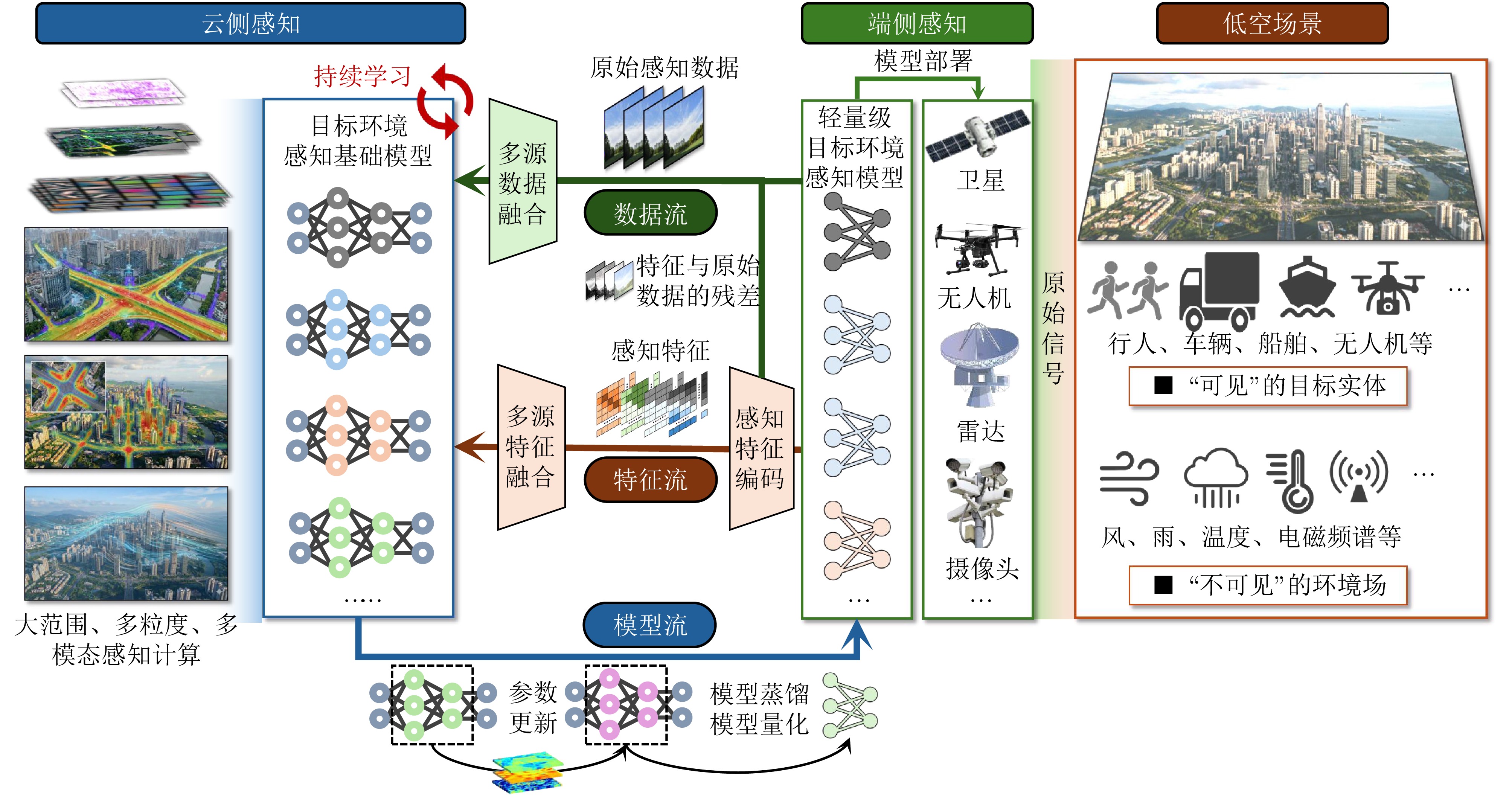
图 3 基于数字视网膜的低空主动感知网架构示意图
Figure 3. Architecture of a digital retina-based low-altitude active perception network
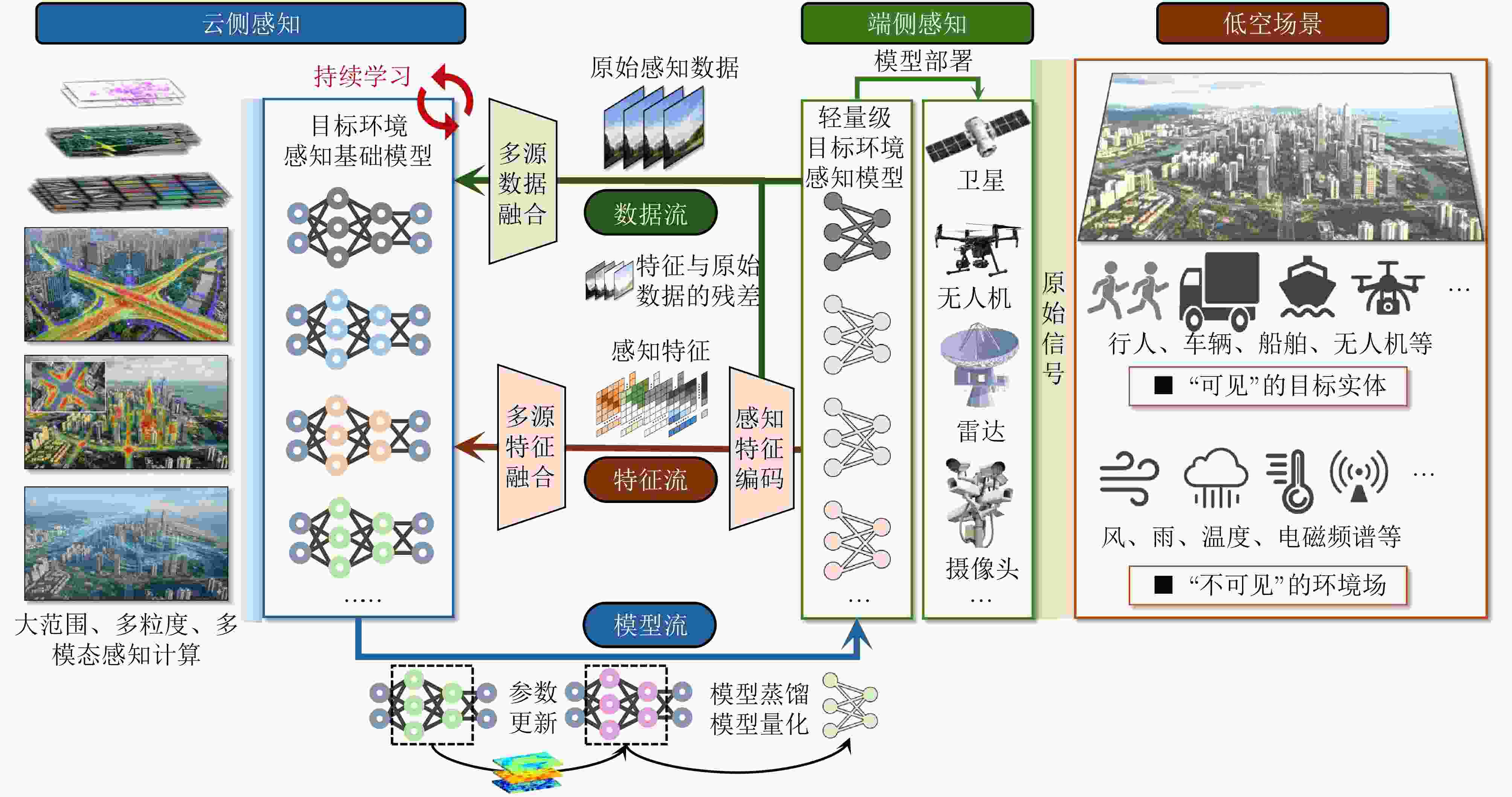
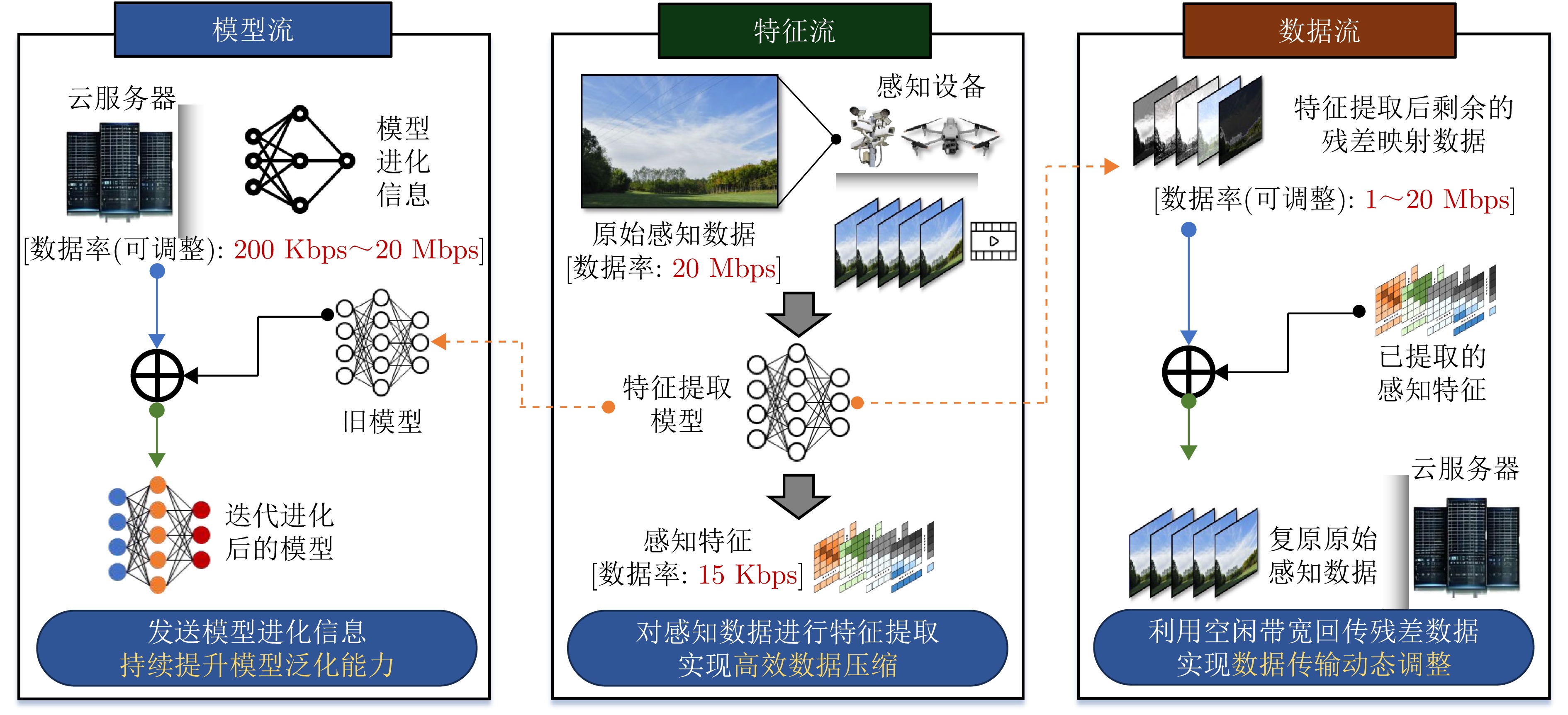
图 5 基于数字视网膜的低空主动感知网感知计算流程示意图
Figure 5. Perception and computation pipeline of the digital retina-based low-altitude active perception network
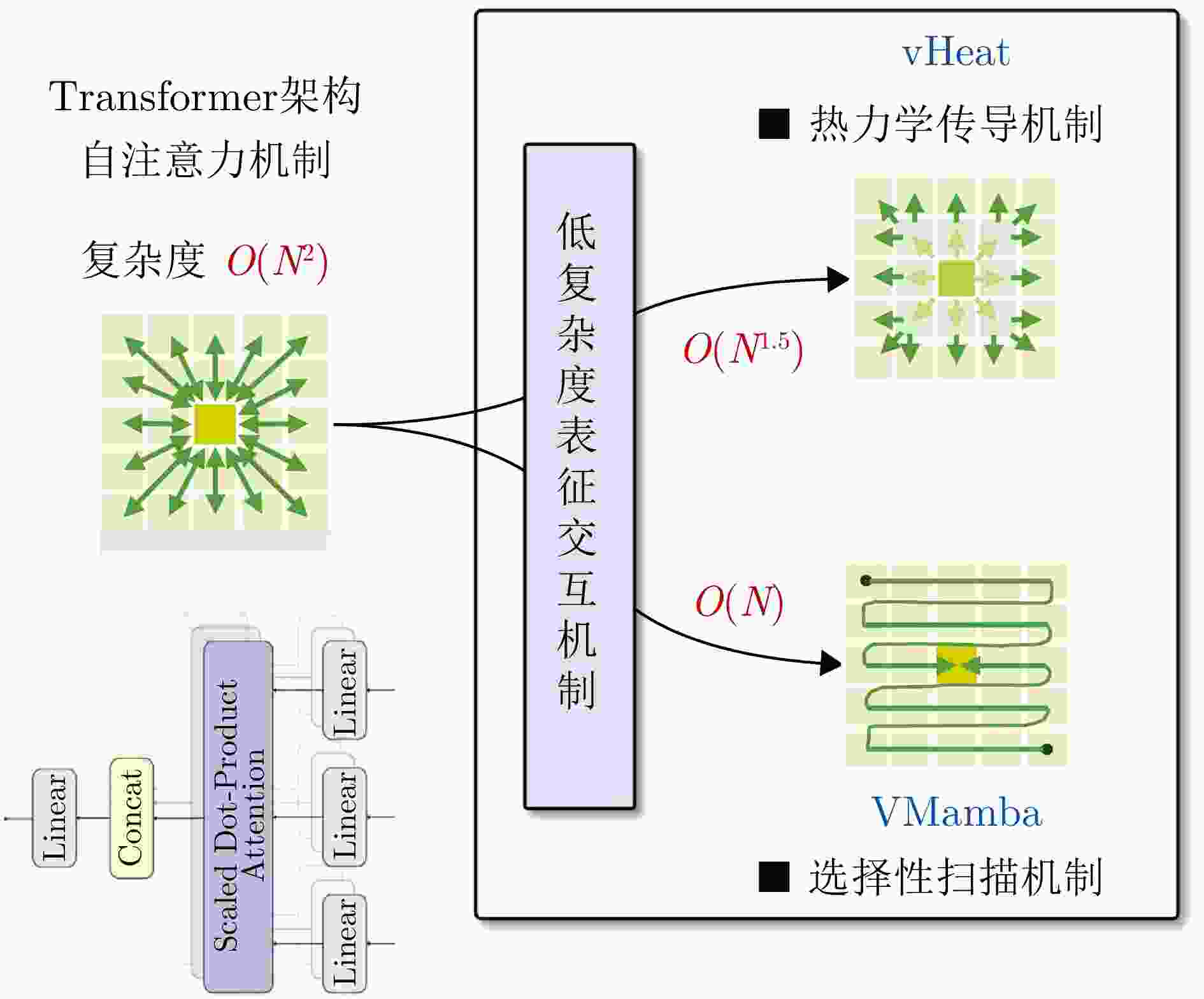
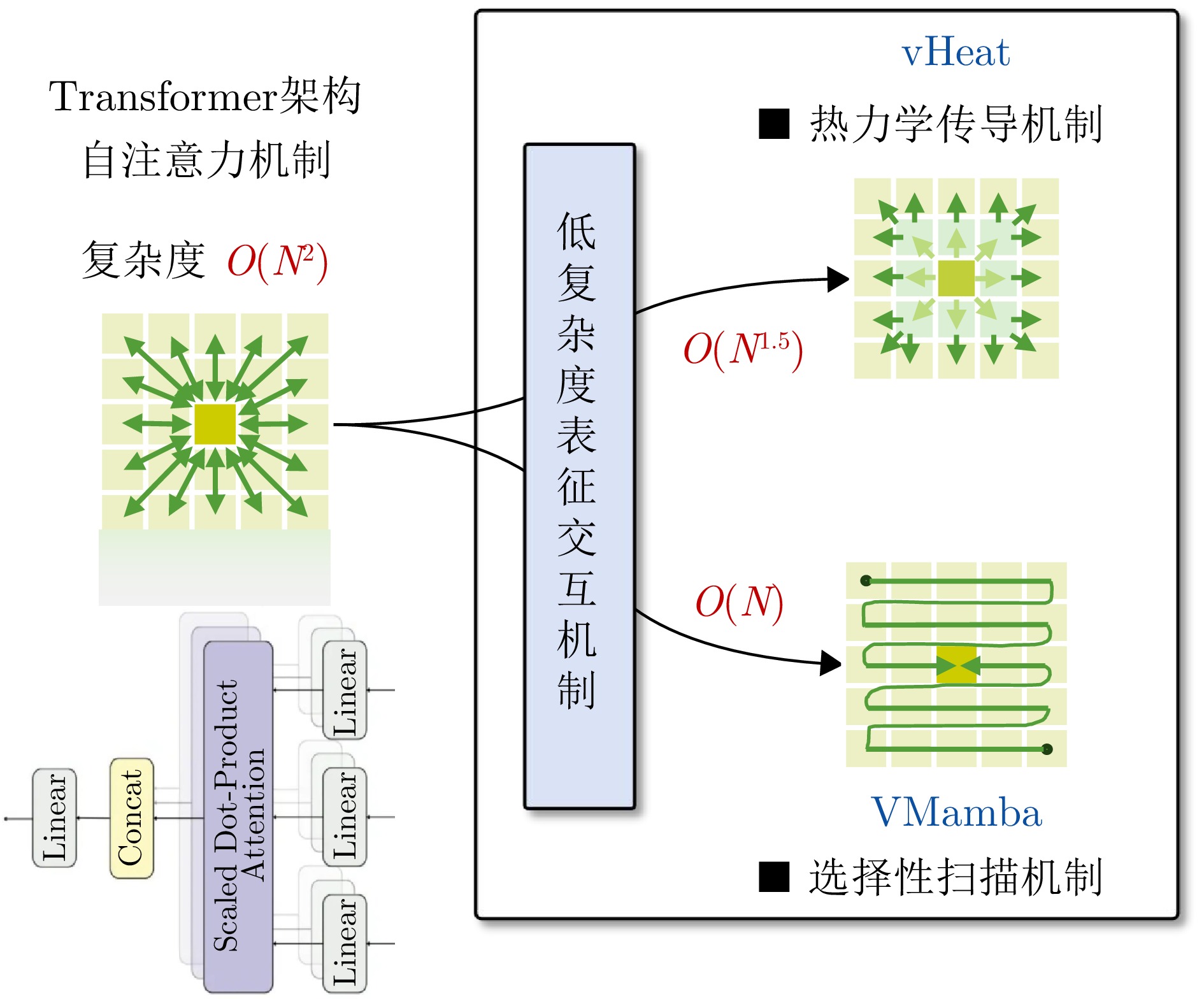
图 6 VMamba与vHeat中的低复杂度计算机制
Figure 6. Low-complexity computing mechanisms in VMamba and vHeat
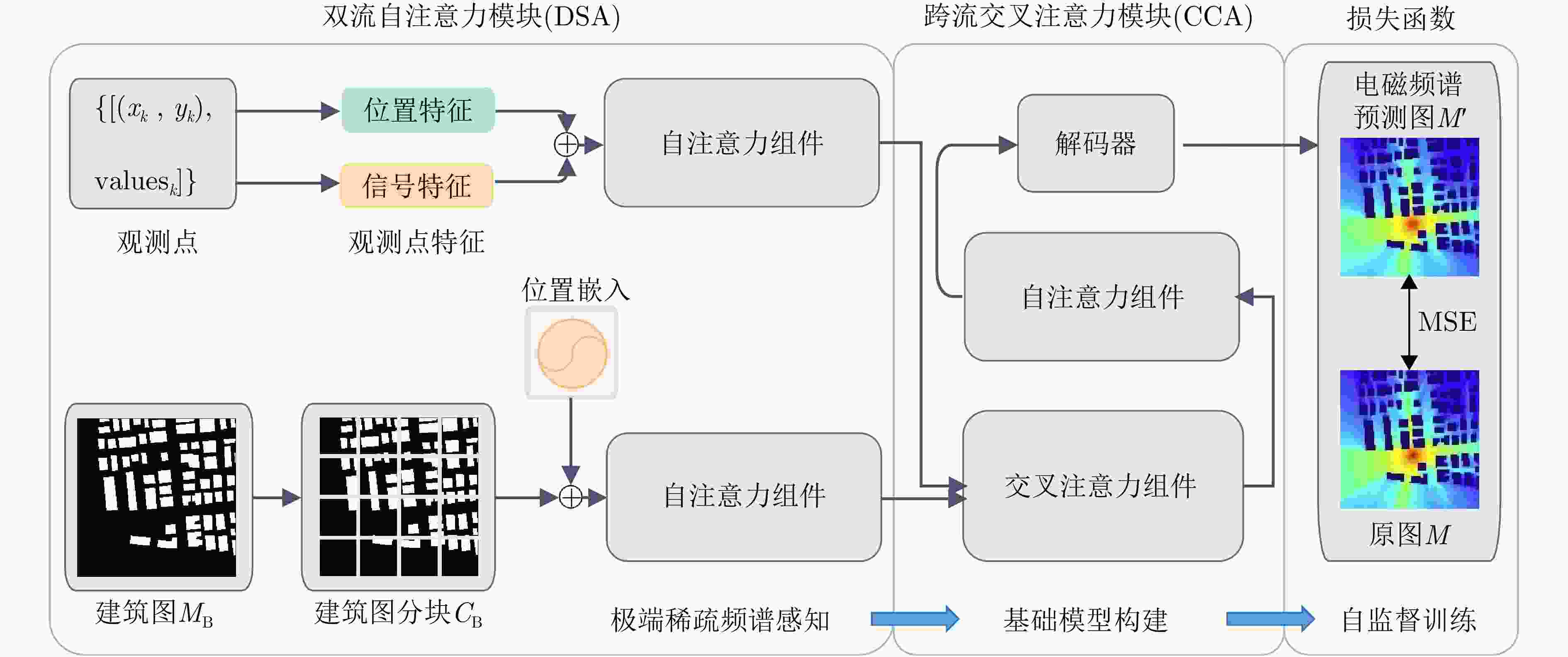
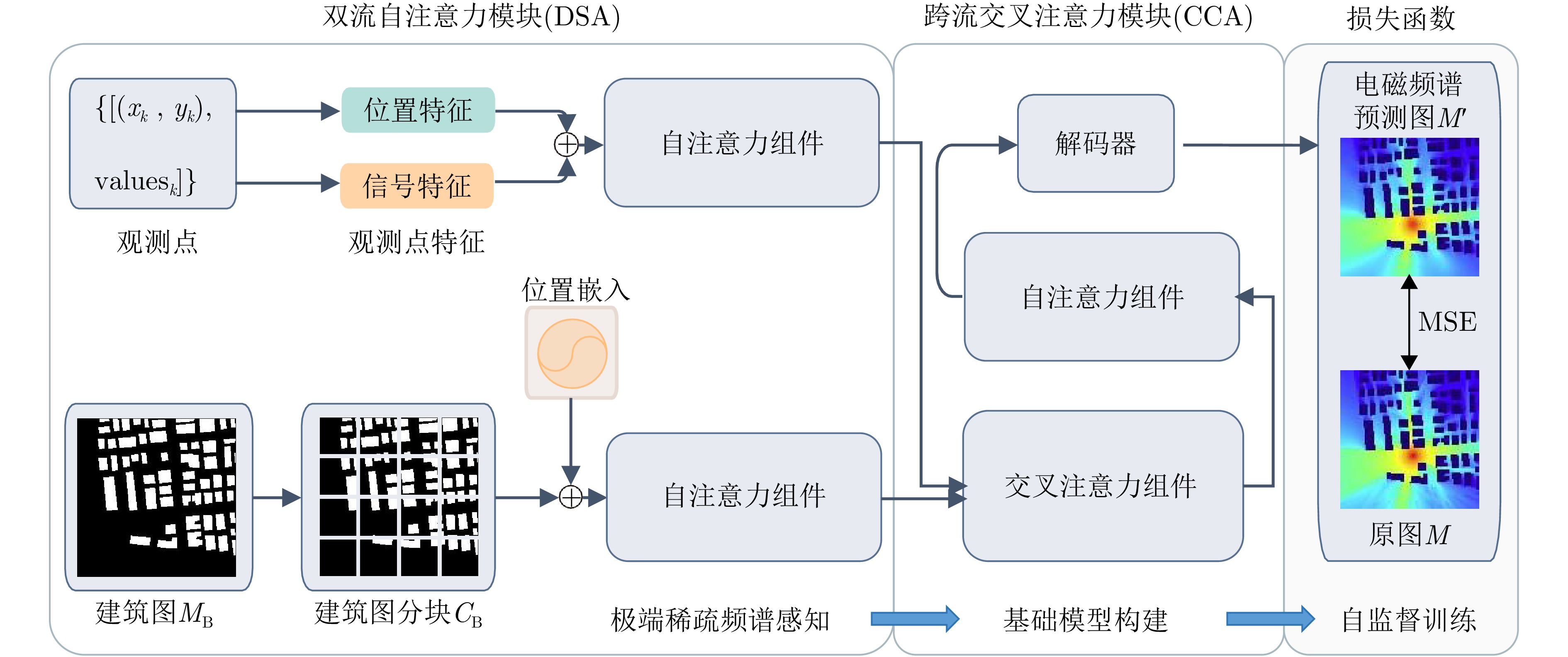
图 7 电磁感知基础模型RadioFormer的整体框架示意图
Figure 7. Famework of the electromagnetic sensing foundation model RadioFormer
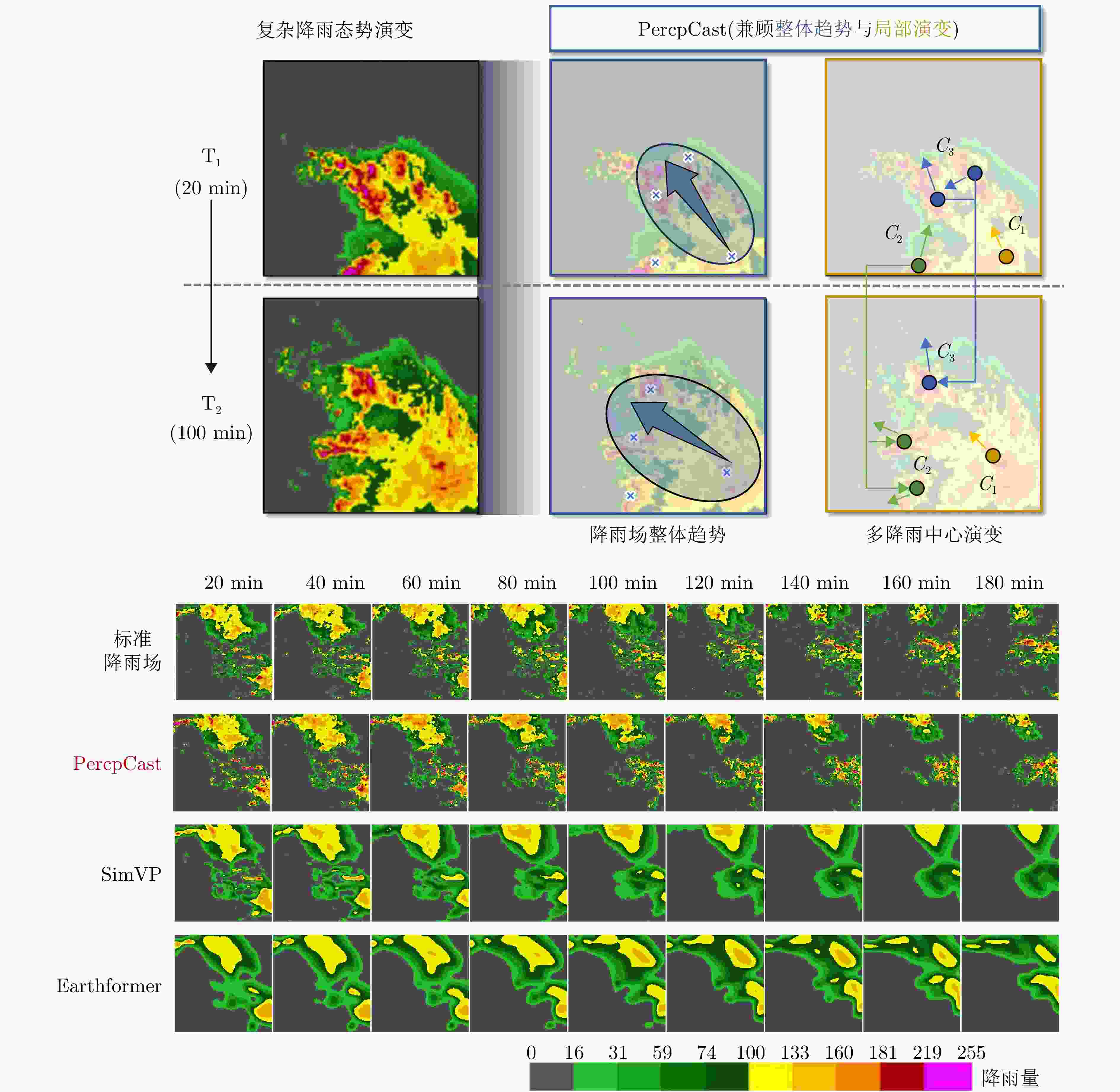
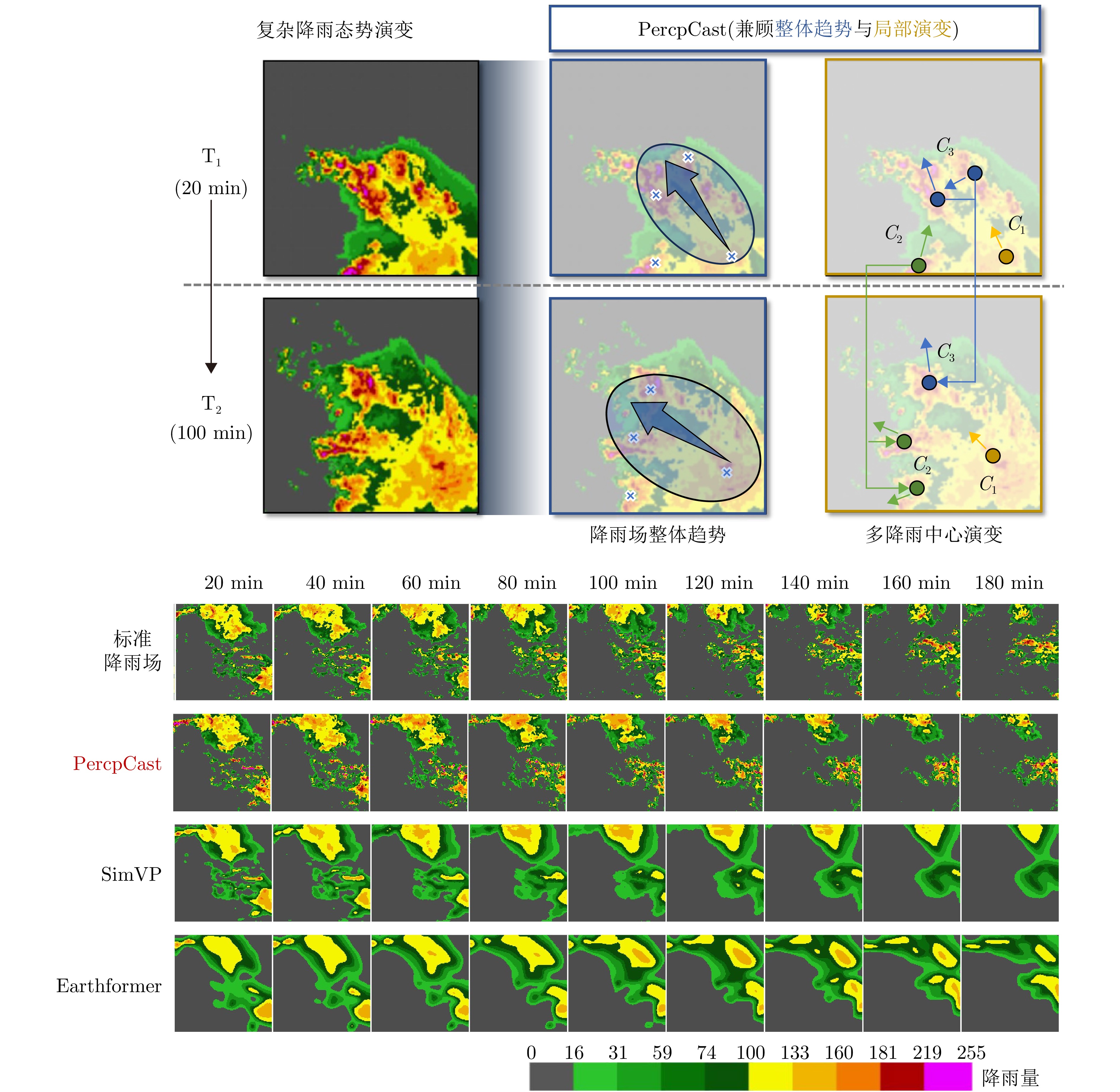
图 8 降水预测模型PercpCast与现有方法的预测结果对比
Figure 8. Comparison of prediction results between the PercpCast and existing methods
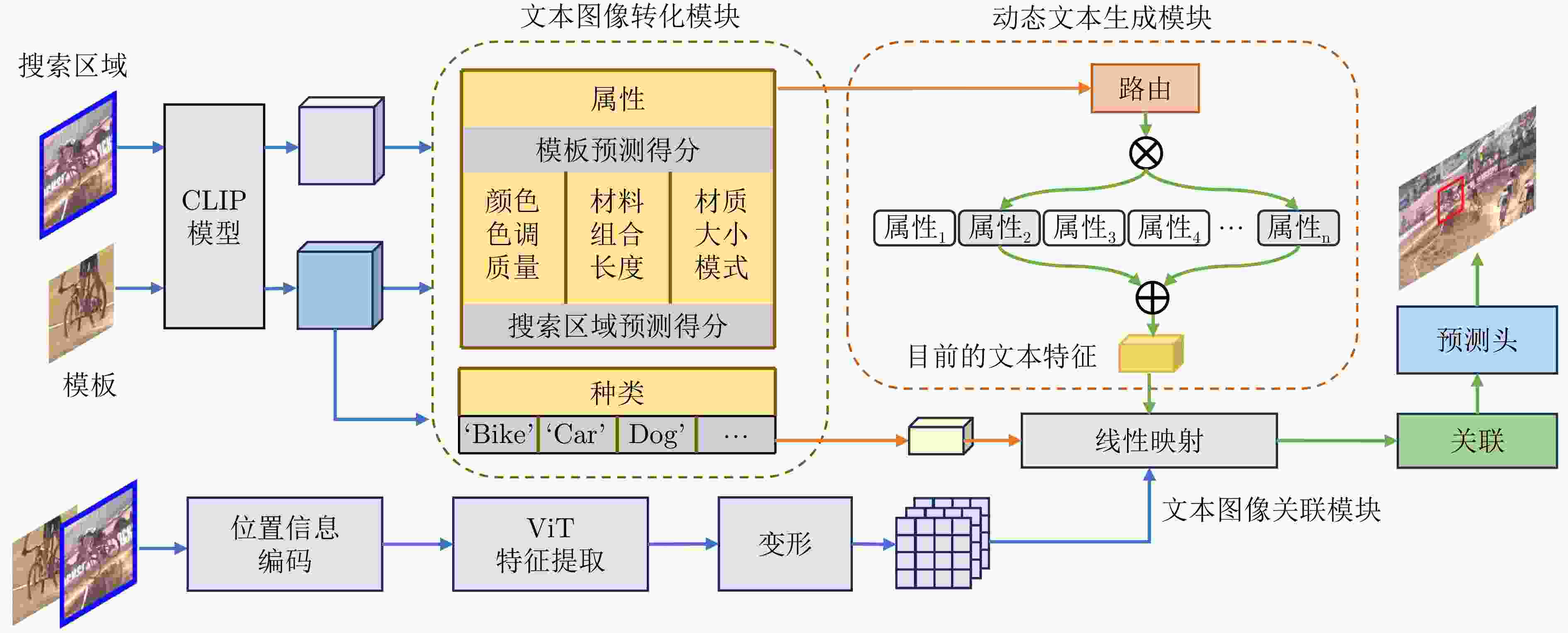
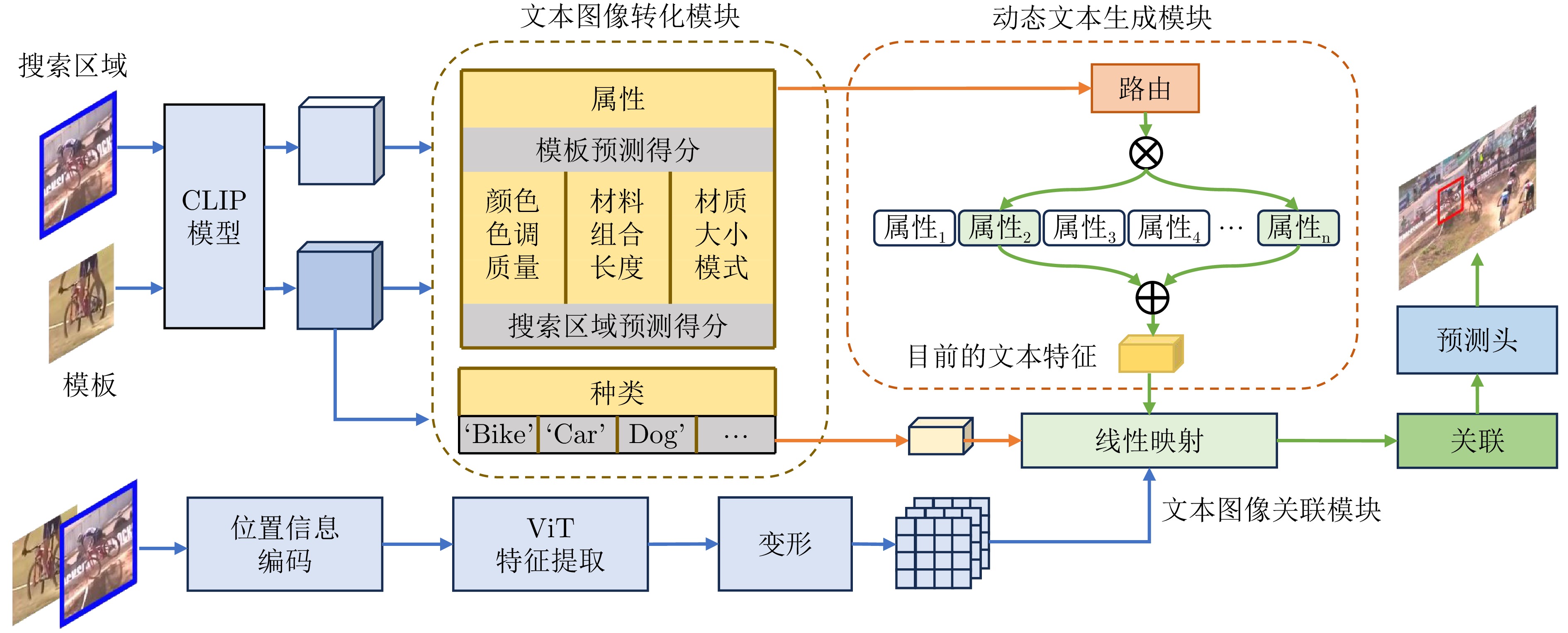
图 9 基于图像与文本关联的视觉跟踪框架CiteTracker
Figure 9. The proposed visual tracking framework CiteTracker
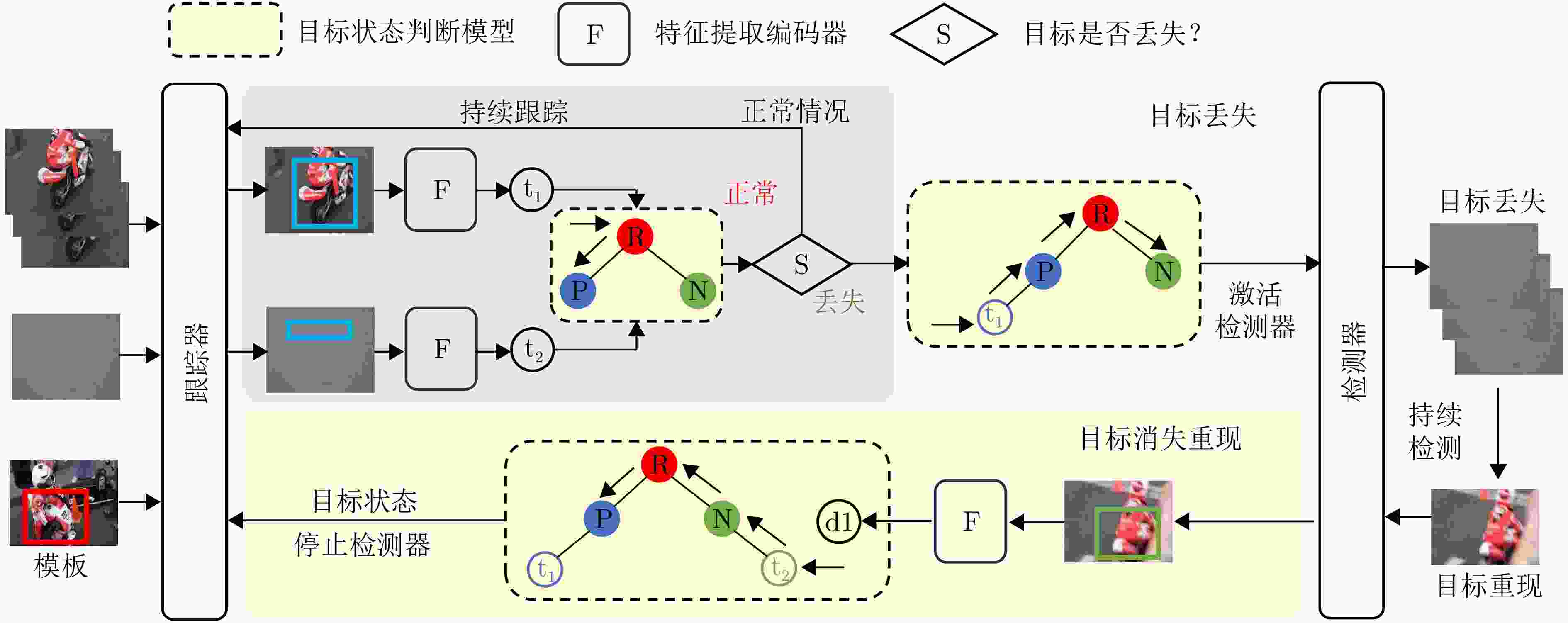
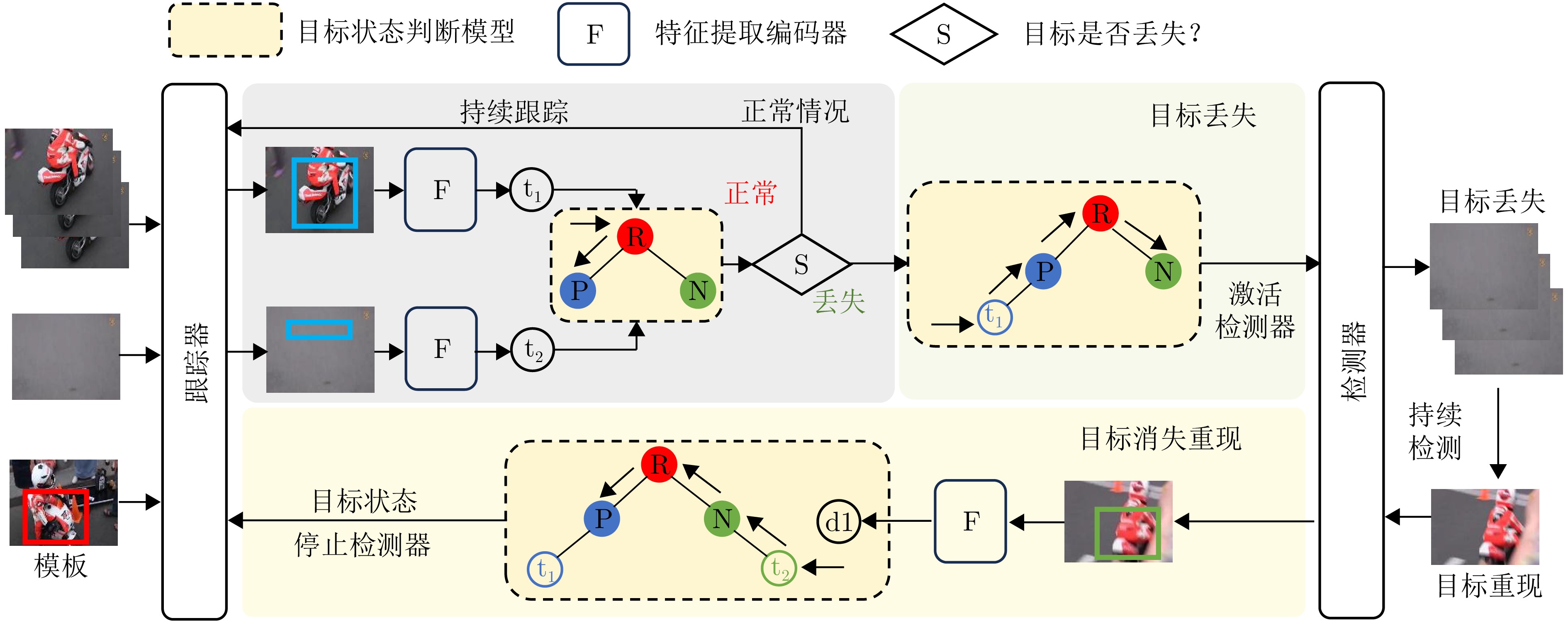
图 10 可恢复跟踪框架Rtracker流程示意图
Figure 10. The pipeline of the proposed recoverable tracking framework Rtracker
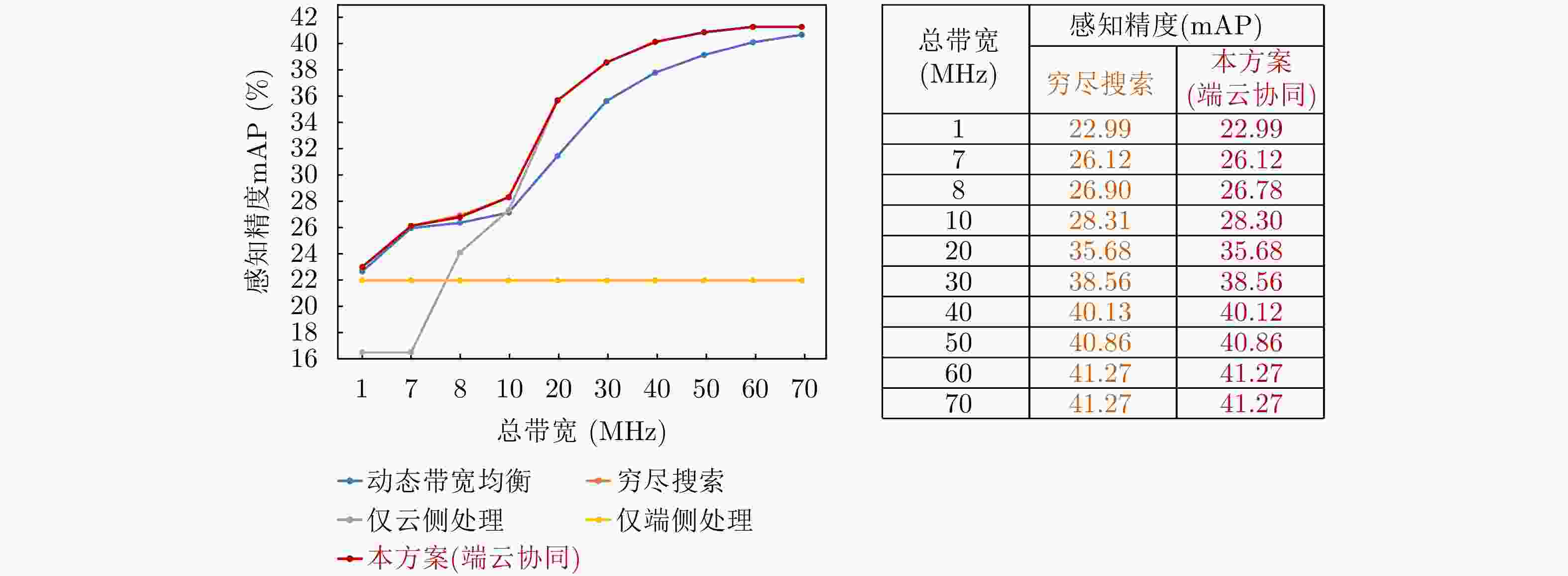
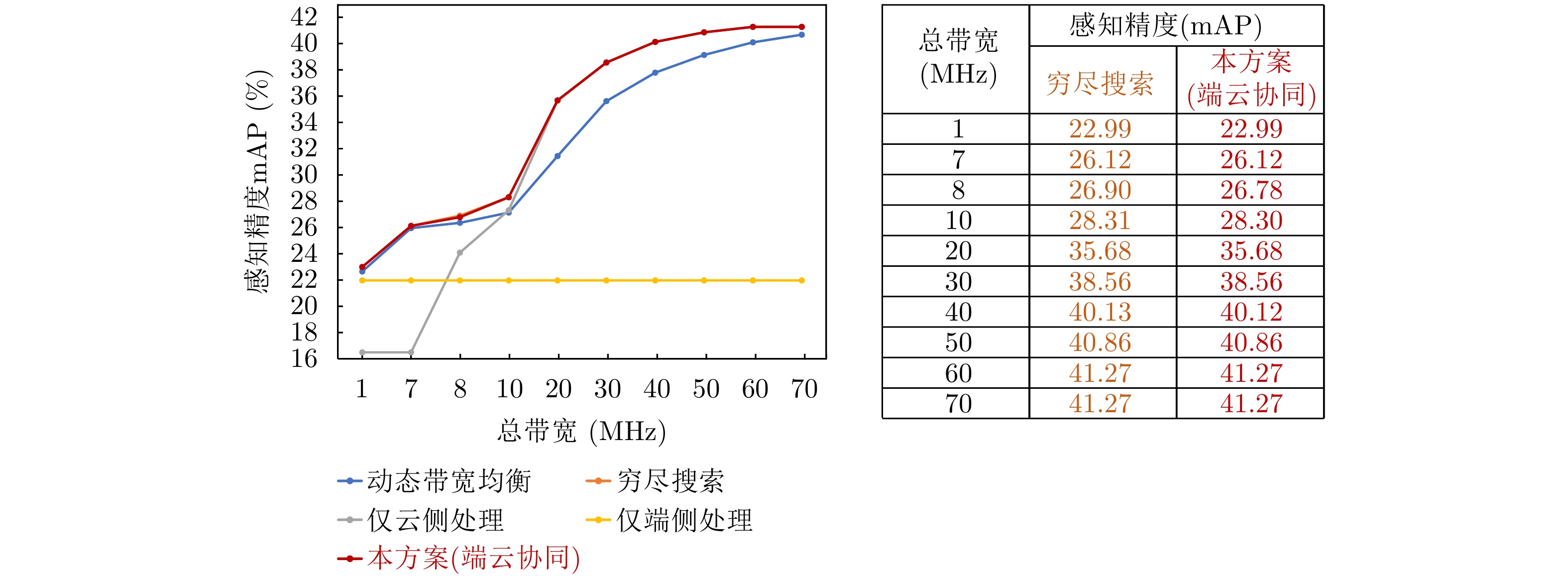
图 11 不同方案在不同带宽下的感知精度对比
Figure 11. Comparison of different schemes under varying bandwidths
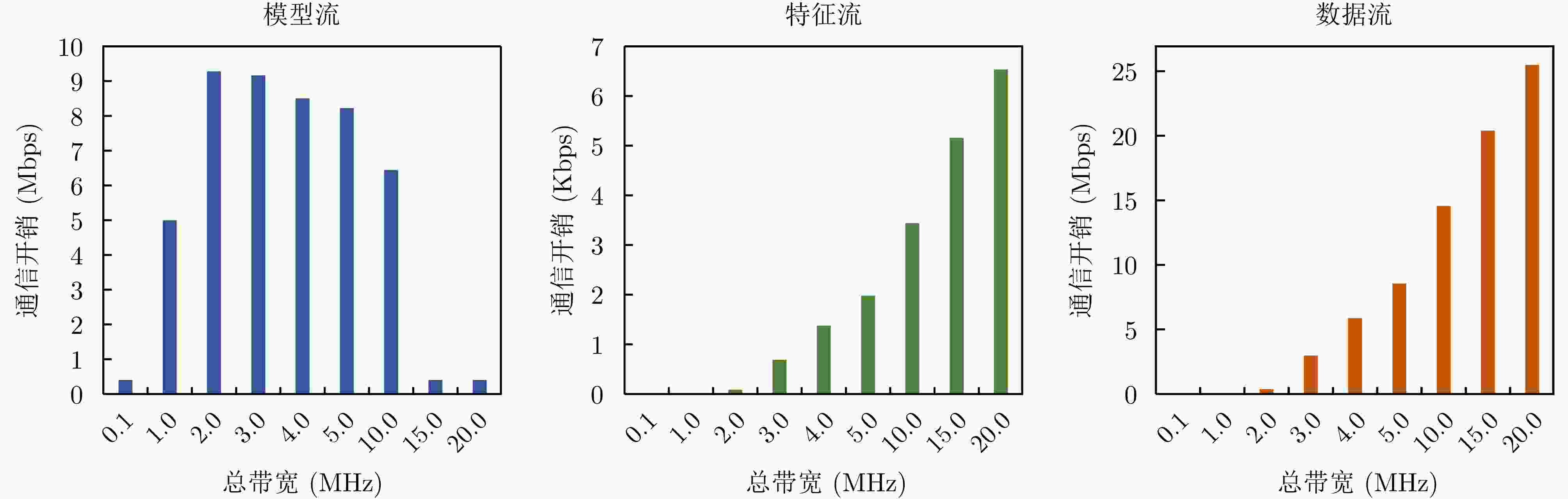
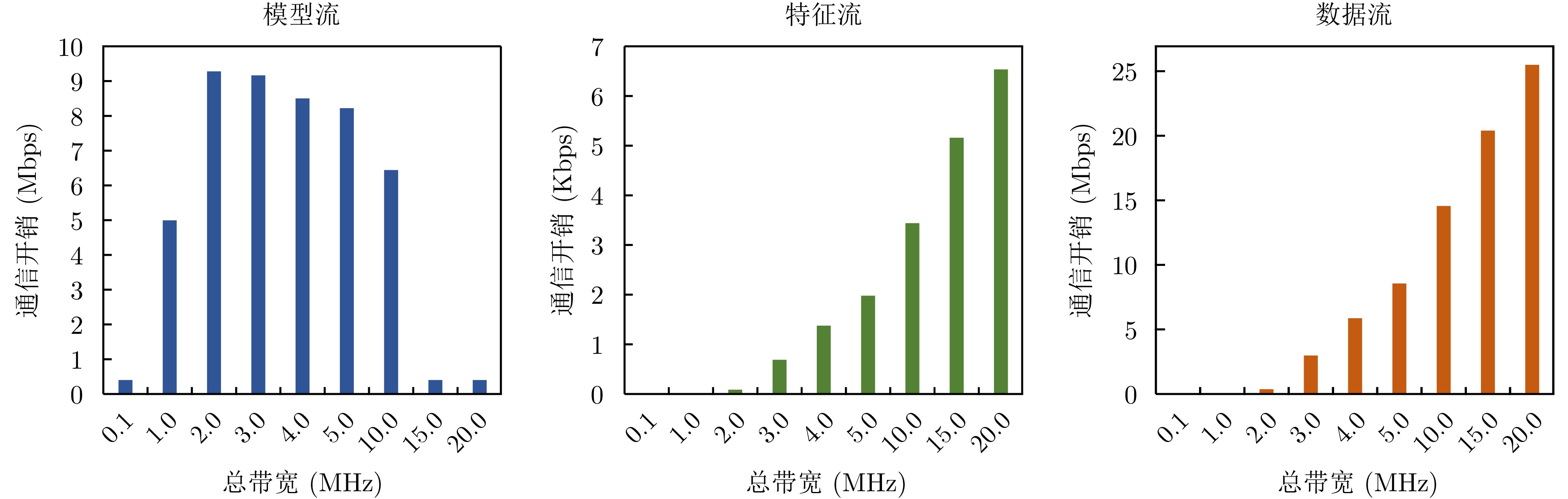
图 12 不同带宽下“三流”的通信开销
Figure 12. Communication overhead of the “three flows” with varying bandwidths
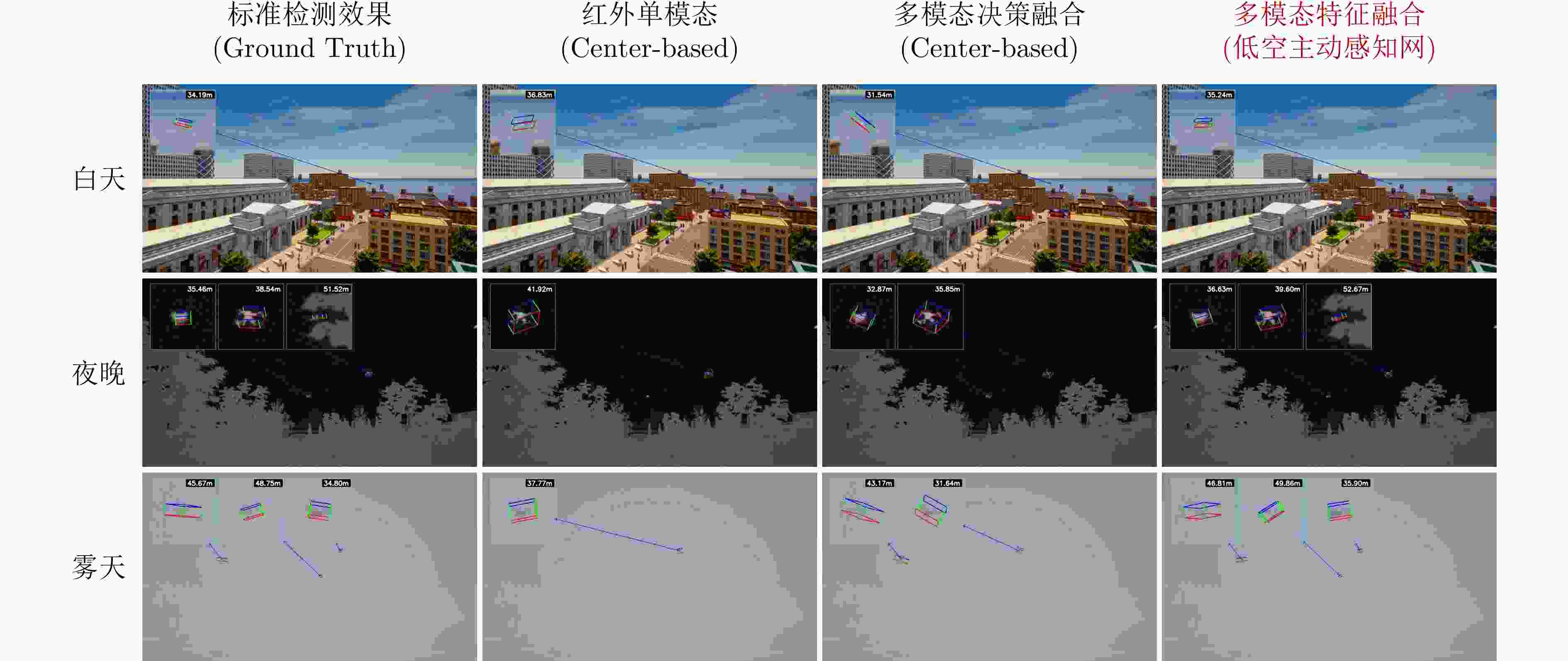
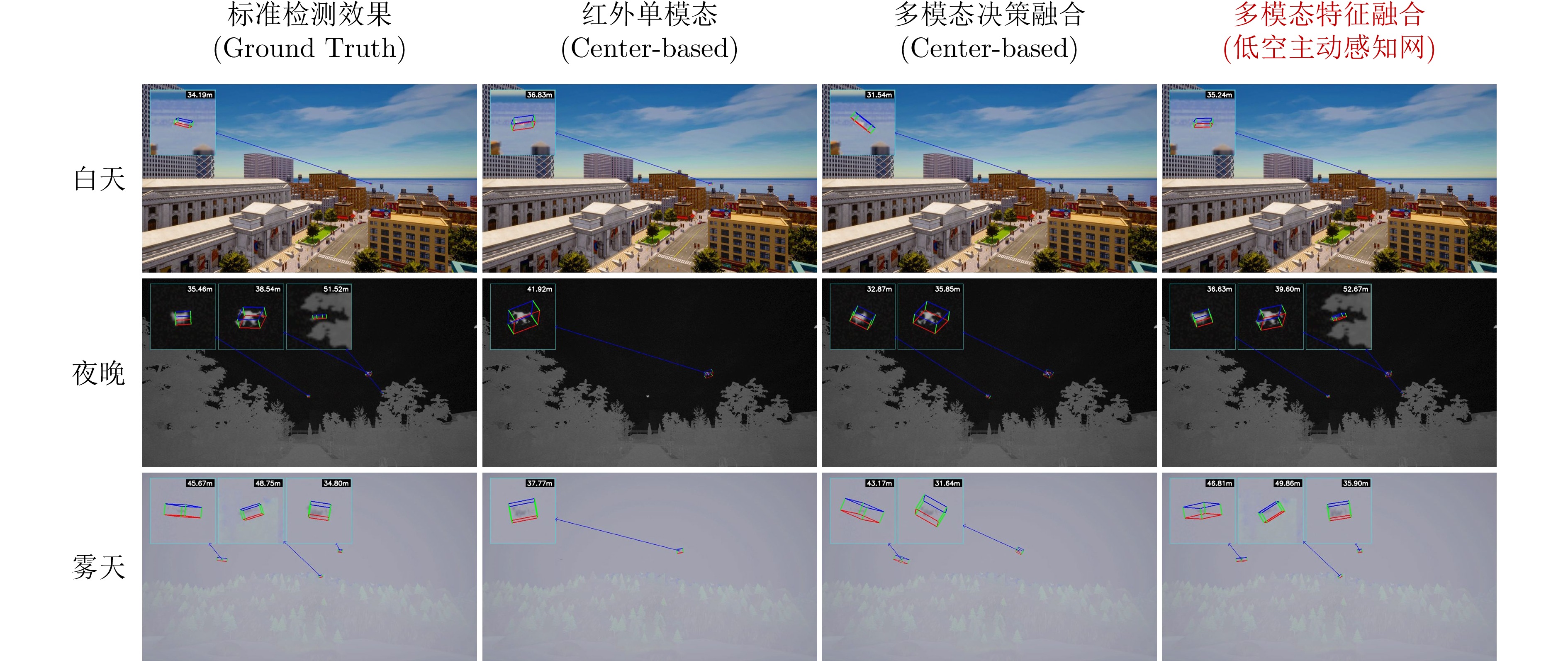
图 13 不同气象与光照条件下的低空小目标感知效果可视化对比
Figure 13. Visual comparison of low-altitude small target perception performance with varying meteorological and illumination conditions
表 1 多种传感器数据的感知优势、挑战和现有研究贡献对比
Table 1. Comparison of perception advantages, challenges, and existing research contributions across multiple sensor modalities
传感器 核心优势 主要缺陷 现有研究贡献 雷达感知 距离远、全天候、径向速度测量 杂波干扰强、SCR极低、算力开销大 脉内/外处理、数据驱动的方法 光电感知 成本低、成像直观、目标识别力强 受环境/光照影响大、感知距离有限 小目标增强、RGB-T融合、Anti-UAV基准 射频感知 非合作式侦收、电磁指纹识别 定位精度低(百米级)、受多径影响 从人工特征转向深度学习智能识别 声学感知 被动探测、独特声纹识别 传播衰减快、距离近(<500 m)、易受噪 3D轨迹估计、加权函数改进、降噪增强  下载: 导出CSV
下载: 导出CSV
表 2 气象感知方法的空间分辨率对比
Table 2. Comparison of spatial resolutions of different meteorological sensing methods
感知方法 空间分辨率 FengWu-GHR 10 km Aurora 11 km MetNet 3 km以内 StormCast 3 km以内 YingLong 3 km以内
下载: 导出CSV
表 3 电磁频谱地图生成方法对比总结
Table 3. Comparison and summary of electromagnetic spectrum map generation methods
感知方法 核心架构 关键机制 主要优势 主要局限 RadioUNet U-Net 基于编码器-解码器的多尺度特征
提取与重建率先建立了深度学习生成电磁频谱地图的基本技术路线;结构简洁,易于训练与迁移 对复杂传播关系的显式
建模能力有限PMNet 改进型CNN
U-Net变体跨层连接+Atrous卷积扩大感受野 能更充分融合浅层细节与深层语义信息,在复杂场景下提升预测精度 仍主要依赖卷积局部建模,对超长距离依赖和全局拓扑关系刻画不足 GNN-based
方法图神经网络
(GNN)将频谱图建模为无向图,在图域
进行信息传播与重建能更自然地建模空间节点之间的关联关系,适合不规则采样分布 图构建方式对性能敏感,计算复杂度较高,大规模场景下扩展性受限 DeepREM U-Net +
CGAN对抗训练增强生成结果的真实性
与分布鲁棒性相比纯重建模型,对场景变化和分布偏移具有更强适应性 对抗训练稳定性较差,训练成本较高,易出现模式不稳定问题 RM-Gen 条件扩散模型 以发射器位置与稀疏采样点为条件输入,利用扩散过程建模复杂
传播分布能较好捕获长距离依赖和复杂多径传播模式,适合极稀疏采样和发射器布局不确定场景 扩散模型训练与推理开销较大,对条件设计和采样策略较敏感 RadioDiff VAE +
扩散模型先映射到隐空间,再在隐空间
执行扩散生成在一定程度上兼顾训练效率与生成质量,缓解像素空间扩散计算开销 隐空间压缩可能带来细节损失,模型设计更复杂,对潜变量质量
依赖较强
下载: 导出CSV
表 4 开放世界场景下的目标检测方法在LVIS数据集[87]的性能对比
Table 4. Comparison of open-world object detection methods on the LVIS[87] dataset
方法 骨干网络 APr APc APf AP Grounding DINO Swin-Tiny 14.4 19.6 32.2 25.6 GenerateU Swin-Tiny 20.0 24.9 29.8 26.8 本文所提Open-Det Swin-Tiny 21.9 25.1 30.4 27.4 注:表内加粗数值表示最优。
下载: 导出CSV
表 5 TLS-MWP在“风速”这一气象要素上的预测结果对比
Table 5. Comparison of prediction results on the “wind speed”
气象感知模型 MAE MSE RMSE SimVP 1.03±0.02 2.20±0.08 1.46±0.03 LS-NTP 0.93±0.00 1.72±0.02 1.30±0.01 MMVP 1.17±0.01 2.72±0.03 1.65±0.01 TAU 1.02±0.00 2.15±0.02 1.45±0.01 所提TLS-MWP 0.89±0.00 1.60±0.01 1.25±0.00 注:表内加粗数值表示最优。
下载: 导出CSV
表 6 低空主动感知网方案关键技术体系
Table 6. Key technological framework of the low-altitude active sensing network
层级 任务 代表性技术/模型 应对的低空挑战与核心机制 系统
协同
机制架构与通信计算 三流协同机制 挑战:低空空地带宽受限与通信拥塞。
机制:单节点输出特征流、数据流与模型流,实现“特征前置、数据按需、模型在线更新”。GRUO
优化模型挑战:端云动态环境下的资源分配。
机制:基于广义速率-效用优化理论,自适应调节特征流/数据流的编码策略与带宽配比。统一时空基准 挑战:多源异构传感器的置信度互补。
机制:赋予异构数据带时间戳与地理坐标的唯一标识,实现多模态物理层与特征层的精准对齐。云侧
感知
基础
模型视觉目标感知 VMamba
vHeat挑战:高分辨率宽幅图像带来的算力冗余与显存瓶颈。
机制:VMamba引入二维选择性扫描(SS2D)实现O(N)复杂度;vHeat基于热传导算子(HCO)在频域内进行自适应特征扩散。电磁环境感知 RadioFormer 挑战:低空复杂环境下的电磁空间极度稀疏观测(如万分之一采样率)。
机制:采用双流自注意力与跨流交叉注意力,实现建筑几何特征与稀疏观测信号的多粒度融合。气象环境感知 PercpCast 挑战:低空突发强降水的精细化高分辨率预报。
机制:结合流体力学物理先验,引入MSE与感知双重约束,保留强降水中心的锐利结构与时空一致性。端侧目标与环境感知技术 低空目标检测 Strip-MLP
Cross-DINO
Open-Det挑战:远距离小目标像素少、易漏检及开放场景未知目标。
机制:利用增强损失(Boost Loss)提升小目标响应;通过脱离预定义词汇表的视觉-语言生成式框架实现开放词汇检测。目标定位与跟踪 HiVG
OneRef
CiteTracker
RTracker挑战:目标遮挡、姿态剧变及弱纹理导致定位匹配漂移。
机制:引入层级多模态低秩适应实现跨模态细粒度对齐;通过“图像-文本”属性语义映射抗干扰,并基于正负决策树实现丢失目标重捕获。气象与电磁感知 TLS-MWP
RadioDUN
DAT-UNet挑战:端侧算力受限下的短临气象预测与高动态电磁态势重构。
机制:以张量融合长短程卷积捕获局地气象突变;基于无线电深度展开网络与可变形注意力,动态适配频谱遮挡与多径效应。
下载: 导出CSV
表 7 仿真环境下不同目标感知方案的6-DoF位姿与检测性能对比
Table 7. Comparison of different object perception schemes in a simulated environment
方法 模态与融合策略 旋转误差(°) 位置误差(m) 尺寸误差(m) 三维目标检测精度(AP) YOLO-6D RGB-only(单模态) 26.47 7.21 0.43 11.78 YOLO-6D IR-only(单模态) 24.15 6.83 0.41 12.26 YOLO-6D 决策级融合(Late Fusion) 22.73 5.95 0.40 13.89 Center-based RGB-only(单模态) 21.65 6.48 0.42 13.07 Center-based IR-only(单模态) 19.29 5.76 0.40 14.64 Center-based 决策级融合(Late Fusion) 17.84 4.92 0.39 17.38 本文所提出的低空感知网方案 几何引导特征融合 10.57 3.64 0.35 26.72 注:加粗数值表示最优。
下载: 导出CSV
-
[1] TANG Hualong, ZHANG Yu, MOHMOODIAN V, et al. Automated flight planning of high-density urban air mobility[J]. Transportation Research Part C: Emerging Technologies, 2021, 131: 103324. doi: 10.1016/j.trc.2021.103324. [2] 蒲钒, 陈志杰, 刘杨, 等. 数字低空融合运行空中交通管理技术[J]. 航空学报, 2025, 46(11): 531331. doi: 10.7527/S1000-6893.2025.31331.PU Fan, CHEN Zhijie, LIU Yang, et al. Air traffic management technologies for digital low-altitude integrated operations[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 531331. doi: 10.7527/S1000-6893.2025.31331. [3] VITIELLO F, CAUSA F, OPROMOLLA R, et al. Radar/visual fusion with fuse-before-track strategy for low altitude non-cooperative sense and avoid[J]. Aerospace Science and Technology, 2024, 146: 108946. doi: 10.1016/j.ast.2024.108946. [4] CHAN Y Y, NG K K H, LEE C K M, et al. Wind dynamic and energy-efficiency path planning for unmanned aerial vehicles in the lower-level airspace and urban air mobility context[J]. Sustainable Energy Technologies and Assessments, 2023, 57: 103202. doi: 10.1016/j.seta.2023.103202. [5] GAO Wen, MA Siwei, DUAN Lingyu, et al. Digital retina: A way to make the city brain more efficient by visual coding[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 31(11): 4147–4161. doi: 10.1109/TCSVT.2021.3104305. [6] 高文, 田永鸿, 王坚. 数字视网膜: 智慧城市系统演进的关键环节[J]. 中国科学: 信息科学, 2018, 48(8): 1076–1082. doi: 10.1360/N112018-00025.GAO Wen, TIAN Yonghong, and WANG Jian. Digital retina: Revolutionizing camera systems for the smart city[J]. Scientia Sinica Informationis, 2018, 48(8): 1076–1082. doi: 10.1360/N112018-00025. [7] 易伟, 袁野, 刘光宏, 等. 多雷达协同探测技术研究进展: 认知跟踪与资源调度算法[J]. 雷达学报, 2023, 12(3): 471–499. doi: 10.12000/JR23036.YI Wei, YUAN Ye, LIU Guanghong, et al. Recent advances in multi-radar collaborative surveillance: Cognitive tracking and resource scheduling algorithms[J]. Journal of Radars, 2023, 12(3): 471–499. doi: 10.12000/JR23036. [8] 葛建军, 唐思琦, 李明强, 等. 复杂感知系统信息理论与构建方法[J]. 雷达学报(中英文), 2025, 14(3): 651–663. doi: 10.12000/JR25078.GE Jianjun, TANG Siqi, LI Mingqiang, et al. Information theory and construction methods of complex perception systems[J]. Journal of Radars, 2025, 14(3): 651–663. doi: 10.12000/JR25078. [9] 宋晓程, 李陟, 任海伟, 等. 目标动态威胁度驱动的分布式组网相控阵雷达资源优化分配算法[J]. 雷达学报, 2023, 12(3): 629–641. doi: 10.12000/JR22240.SONG Xiaocheng, LI Zhi, REN Haiwei, et al. Threat-driven resource allocation algorithm for distributed netted phased array radars[J]. Journal of Radars, 2023, 12(3): 629–641. doi: 10.12000/JR22240. [10] ANANTHANARAYANAN G, BAHL P, BODÍK P, et al. Real-time video analytics: The killer app for edge computing[J]. Computer, 2017, 50(10): 58–67. doi: 10.1109/MC.2017.3641638. [11] NAN Ya, JIANG Shiqi, and LI Mo. Large-scale video analytics with cloud-edge collaborative continuous learning[J]. ACM Transactions on Sensor Networks, 2024, 20(1): 14. doi: 10.1145/3624478. [12] ZHOU Zhiqing, YU Heng, and SHI Hesheng. Optimization of wireless video surveillance system for smart campus based on internet of things[J]. IEEE Access, 2020, 8: 136434–136448. doi: 10.1109/ACCESS.2020.3011951. [13] AKLAMATI D, ABDUS-SHAKUR B, and KACEM T. Security analysis of AWS-based video surveillance systems[C]. 2021 International Conference on Engineering and Emerging Technologies, Istanbul, Turkey, 2021: 1–6. doi: 10.1109/ICEET53442.2021.9659574. [14] LI Rongheng, ZHANG Jian, and SHEN Wenfeng. Replicas strategy and cache optimization of video surveillance systems based on cloud storage[J]. Future Internet, 2018, 10(4): 34. doi: 10.3390/fi10040034. [15] SUBUDHI B N, ROUT D K, and GHOSH A. Big data analytics for video surveillance[J]. Multimedia Tools and Applications, 2019, 78(18): 26129–26162. doi: 10.1007/s11042-019-07793-w. [16] DO T T T, HUYNH Q T, KIM K, et al. A survey on video big data analytics: Architecture, technologies, and open research challenges[J]. Applied Sciences, 2025, 15(14): 8089. doi: 10.3390/app15148089. [17] 杨铮, 贺骁武, 吴家行, 等. 面向实时视频流分析的边缘计算技术[J]. 中国科学: 信息科学, 2022, 52(1): 1–53. doi: 10.1360/SSI-2021-0133.YANG Zheng, HE Xiaowu, WU Jiahang, et al. Edge computing technologies for streaming video analytics[J]. Scientia sinica Informationis, 2022, 52(1): 1–53. doi: 10.1360/SSI-2021-0133. [18] AXIS Communications. The history of ARTPEC, the foundation of our product quality[EB/OL]. https://newsroom.axis.com/en-sg/article/artpec-foundation-quality, 2024. [19] 王秉路, 靳杨, 张磊, 等. 基于多传感器融合的协同感知方法[J]. 雷达学报(中英文), 2024, 13(1): 87–96. doi: 10.12000/JR23184.WANG Binglu, JIN Yang, ZHANG Lei, et al. Collaborative perception method based on multisensor fusion[J]. Journal of Radars, 2024, 13(1): 87–96. doi: 10.12000/JR23184. [20] JAIN S, ANANTHANARAYANAN G, JIANG Junchen, et al. Scaling video analytics systems to large camera deployments[C]. The 20th International Workshop on Mobile Computing Systems and Applications, Santa Cruz, USA, 2019: 9–14. doi: 10.1145/3301293.3302366. [21] NEFF C, MENDIETA M, MOHAN S, et al. REVAMP2T: Real-time edge video analytics for multicamera privacy-aware pedestrian tracking[J]. IEEE Internet of Things Journal, 2020, 7(4): 2591–2602. doi: 10.1109/JIOT.2019.2954804. [22] WANG Bingshu, LI Qiang, MAO Qianchen, et al. A survey on vision-based anti unmanned aerial vehicles methods[J]. Drones, 2024, 8(9): 518. doi: 10.3390/drones8090518. [23] ZHAO Jie, ZHANG Jingshu, LI Dongdong, et al. Vision-based anti-UAV detection and tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25323–25334. doi: 10.1109/TITS.2022.3177627. [24] 冯卫强, 李哲, 周强, 等. LSS-YOLO: 面向低慢小无人机的目标检测方法[J]. 火炮发射与控制学报, 2025, 46(6): 17–25. doi: 10.19323/j.issn.1673-6524.202506001.FENG Weiqiang, LI Zhe, ZHOU Qiang, et al. LSS-YOLO: A target detection method for low-slow-small UAVs[J]. Journal of Gun Launch & Control, 2025, 46(6): 17–25. doi: 10.19323/j.issn.1673-6524.202506001. [25] 王迎龙, 孙备, 丁冰, 等. BG-YOLO: 复杂大视场下低慢小无人机目标检测方法[J]. 仪器仪表学报, 2025, 46(2): 255–266. doi: 10.19650/j.cnki.cjsi.J2413551.WANG Yinglong, SUN Bei, DING Bing, et al. BG-YOLO: A low-altitude slow-moving small UAV targets detection method in complex large field of view[J]. Chinese Journal of Scientific Instrument, 2025, 46(2): 255–266. doi: 10.19650/j.cnki.cjsi.J2413551. [26] JIANG Nan, WANG Kuiran, PENG Xiaoke, et al. Anti-UAV: A large-scale benchmark for vision-based UAV tracking[J]. IEEE Transactions on Multimedia, 2023, 25: 486–500. doi: 10.1109/TMM.2021.3128047. [27] ZHANG Tianlu, GUO Hongyuan, JIAO Qiang, et al. Efficient RGB-T tracking via cross-modality distillation[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 5404–5413. doi: 10.1109/CVPR52729.2023.00523. [28] HUI Tianrui, XUN Zizheng, PENG Fengguang, et al. Bridging search region interaction with template for RGB-T tracking[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 13630–13639. doi: 10.1109/CVPR52729.2023.01310. [29] 申炜豪, 马浩统, 樊红星, 等. 复杂场景下多目标高精度探测技术研究进展[J/OL]. 激光与光电子学进展. https://link.cnki.net/urlid/31.1690.TN.20251027.2254.116, 2025.SHEN Weihao, MA Haotong, FAN Hongxing, et al. Research progress on mult-target high-accuracy detection technology in complex scenarios[J/OL]. Laser & Optoelectronics Progress. https://link.cnki.net/urlid/31.1690.TN.20251027.2254.116, 2025. [30] ROHLING H. Radar CFAR thresholding in clutter and multiple target situations[J]. IEEE Transactions on Aerospace and Electronic Systems, 1983, AES-19(4): 608–621. doi: 10.1109/TAES.1983.309350. [31] BAR-SHALOM Y, LI X R, and KIRUBARAJAN T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software[M]. New York: John Wiley & Sons, Inc., 2001. doi: 10.1002/0471221279. [32] ŚLESICK B, ŚLESICKA A, KAWALEC A, et al. Improving recognition of road users via Doppler radar data and deep learning convolutional networks[J]. Electronics, 2024, 13(20): 4070. doi: 10.3390/electronics13204070. [33] LUO Xiaoyu and LI Qiusheng. Human motion recognition based on feature fusion and residual networks[J]. Scientific Reports, 2024, 14(1): 29097. doi: 10.1038/s41598-024-80783-7. [34] 陈小龙, 陈唯实, 饶云华, 等. 飞鸟与无人机目标雷达探测与识别技术进展与展望[J]. 雷达学报, 2020, 9(5): 803–827. doi: 10.12000/JR20068.CHEN Xiaolong, CHEN Weishi, RAO Yunhua, et al. Progress and prospects of radar target detection and recognition technology for flying birds and unmanned aerial vehicles[J]. Journal of Radars, 2020, 9(5): 803–827. doi: 10.12000/JR20068. [35] 陈小龙, 袁旺, 杜晓林, 等. 多波段多角度FMCW雷达低慢小探测数据集(LSS-FMCWR-2.0)及特征融合分类方法[J]. 雷达学报(中英文), 2025, 14(5): 1276–1293. doi: 10.12000/JR25004.CHEN Xiaolong, YUAN Wang, DU Xiaolin, et al. Multi-band multi-angle FMCW radar low-slow-small target detection dataset (LSS-FMCWR-2.0) and feature fusion classification methods[J]. Journal of Radars, 2025, 14(5): 1276–1293. doi: 10.12000/JR25004. [36] 陈小龙, 饶桂林, 关键, 等. 被动雷达低慢小探测数据集(LSS-PR-1.0)及多域特征提取和分析方法[J]. 雷达学报(中英文), 2025, 14(2): 249–268. doi: 10.12000/JR24145.CHEN Xiaolong, RAO Guilin, GUAN Jian, et al. Passive radar low slow small detection dataset (LSS-PR-1.0) and multi-domain feature extraction and analysis methods[J]. Journal of Radars, 2025, 14(2): 249–268. doi: 10.12000/JR24145. [37] 肖振, 谷延锋, 蒋彦泽, 等. 时空耦合模型驱动的激光雷达多目标回波轻量化检测算法[J]. 雷达学报(中英文), 2025, 14(3): 548–561. doi: 10.12000/JR24245.XIAO Zhen, GU Yanfeng, JIANG Yanze, et al. Full-waveform small-footprint LiDAR multi-target echo waveform lightweight detection by spatio-temporal coupling models[J]. Journal of Radars, 2025, 14(3): 548–561. doi: 10.12000/JR24245. [38] 刘斌越, 杨建强, 徐波, 等. 5G-A通感一体基站组网低空感知关键技术[J]. 信号处理, 2025, 41(5): 787–806. doi: 10.12466/xhcl.2025.05.002.LIU Binyue, YANG Jianqiang, XU Bo, et al. Key technologies for low-altitude sensing in 5G-A integrated communication and sensing networks[J]. Journal of Signal Processing, 2025, 41(5): 787–806. doi: 10.12466/xhcl.2025.05.002. [39] 唐爱民, 王书涵, 曲文泽. 面向远距离高速无人机检测的OFDM通信感知一体化参考信号设计[J]. 雷达学报(中英文), 2025, 14(4): 842–853. doi: 10.12000/JR24240.TANG Aimin, WANG Shuhan, and QU Wenze. Reference signal design in OFDM ISAC for long-range and high-speed UAV detection[J]. Journal of Radars, 2025, 14(4): 842–853. doi: 10.12000/JR24240. [40] 陈辉, 杜双燕, 连峰, 等. Track-MT3: 一种基于Transformer的新型多目标跟踪算法[J]. 雷达学报(中英文), 2024, 13(6): 1202–1219. doi: 10.12000/JR24164.CHEN Hui, DU Shuangyan, LIAN Feng, et al. Track-MT3: A novel multitarget tracking algorithm based on transformer network[J]. Journal of Radars, 2024, 13(6): 1202–1219. doi: 10.12000/JR24164. [41] NIE Wei, HAN Zhichao, LI Yi, et al. UAV detection and localization based on multi-dimensional signal features[J]. IEEE Sensors Journal, 2022, 22(6): 5150–5162. doi: 10.1109/JSEN.2021.3105229. [42] AL-SA’D M F, AL-ALI A, MOHAMED A, et al. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database[J]. Future Generation Computer Systems, 2019, 100: 86–97. doi: 10.1016/j.future.2019.05.007. [43] XU Jingren, LI Zhen, ZHANG Kai, et al. The principle, methods and recent progress in RFID positioning techniques: A review[J]. IEEE Journal of Radio Frequency Identification, 2023, 7: 50–63. doi: 10.1109/JRFID.2022.3233855. [44] CHEN Huawei and ZHAO Junwei. On locating low altitude moving targets using a planar acoustic sensor array[J]. Applied Acoustics, 2003, 64(11): 1087–1101. doi: 10.1016/S0003-682X(03)00073-2. [45] TONG Jianfei, XIE Wei, HU Yuhen, et al. Estimation of low-altitude moving target trajectory using single acoustic array[J]. The Journal of the Acoustical Society of America, 2016, 139(4): 1848–1858. doi: 10.1121/1.4944567. [46] SONG Chunhuan and LI Hanshan. An acoustic array sensor signal recognition algorithm for low-altitude targets using multiple five-element acoustic positioning systems with VMD[J]. Applied Sciences, 2024, 14(3): 1075. doi: 10.3390/app14031075. [47] LIU Miao, YU Jiyan, and YANG Zhengpeng. Research on the improvement of the signal time delay estimation method of acoustic positioning for anti-low altitude UAVs[J]. Sensors, 2025, 25(9): 2735. doi: 10.3390/s25092735. [48] YANG Bowon, MATSON E T, SMITH A H, et al. UAV detection system with multiple acoustic nodes using machine learning models[C]. The Third IEEE International Conference on Robotic Computing, Naples, Italy, 2019: 493–498. doi: 10.1109/IRC.2019.00103. [49] MIĘSIKOWSKA M. Classification of unmanned aerial vehicles based on acoustic signals obtained in external environmental conditions[J]. Sensors, 2024, 24(17): 5663. doi: 10.3390/s24175663. [50] PASZKOWSKI W, GOLA A, and SWIC A. Acoustic-based drone detection using neural networks-a comprehensive analysis[J]. Advances in Science and Technology Research Journal, 2024, 18(1): 36–47. doi: 10.12913/22998624/175863. [51] NAJAFI J, MIRZAKUCHAKI S, and SHAMAGHDARI S. Autonomous drone detection and classification using computer vision and Prony algorithm-based frequency feature extraction[J]. Journal of Intelligent & Robotic Systems, 2025, 111(1): 8. doi: 10.1007/s10846-024-02216-x. [52] DING Siyi, GUO Xiao, PENG Ti, et al. Drone detection and tracking system based on fused acoustical and optical approaches[J]. Advanced Intelligent Systems, 2023, 5(10): 2300251. doi: 10.1002/aisy.202300251. [53] MARTINEZ-GARCÍA F P, CONTRERAS-DE-VILLAR A, and MUÑOZ-PEREZ J J. Review of wind models at a local scale: Advantages and disadvantages[J]. Journal of Marine Science and Engineering, 2021, 9(3): 318. doi: 10.3390/jmse9030318. [54] WU Yuankang and HONG Jingshan. A literature review of wind forecasting technology in the world[C]. The IEEE Lausanne Power Tech, Lausanne, Switzerland, 2007: 504–509. doi: 10.1109/PCT.2007.4538368. [55] 刘夏, 韩雁飞, 李海, 等. 基于数值天气预报模式的机载气象雷达降雨目标极化特性仿真[J]. 雷达学报, 2016, 5(2): 190–199. doi: 10.12000/JR16048.LIU Xia, HAN Yanfei, LI Hai, et al. Polarization characteristics simulation of airborne weather radar rainfall target based on numerical weather prediction[J]. Journal of Radars, 2016, 5(2): 190–199. doi: 10.12000/JR16048. [56] ZHANG Zongwei, LIN Lianlei, GAO Sheng, et al. A machine learning model for hub-height short-term wind speed prediction[J]. Nature Communications, 2025, 16(1): 3195. doi: 10.1038/s41467-025-58456-4. [57] HAN Tao, GUO Song, LING Fenghua, et al. FengWu-GHR: Learning the kilometer-scale medium-range global weather forecasting[EB/OL]. https://arxiv.org/abs/2402.00059, 2024. [58] BODNAR C, BRUINSMA W P, LUCIC A, et al. A foundation model for the Earth system[J]. Nature, 2025, 641(8065): 1180–1187. doi: 10.1038/s41586-025-09005-y. [59] ESPEHOLT L, AGRAWAL S, SØNDERBY C, et al. Deep learning for twelve hour precipitation forecasts[J]. Nature Communications, 2022, 13(1): 5145. ddoi: 10.1038/s41467-022-32483-x. [60] ANDRYCHOWICZ M, ESPEHOLT L, LI Di, et al. Deep learning for day forecasts from sparse observations[EB/OL]. https://arxiv.org/abs/2306.06079, 2023. [61] PATHAK J, COHEN Y, and GARG P. Kilometer-scale convection-allowing model emulation using generative diffusion modeling[J]. Science Advances, 2026, 12(5): eadv0423. doi: 10.1126/sciadv.adv0423. [62] XU Pengbo, ZHENG Xiaogu, GAO Tianyan, et al. An artificial intelligence-based limited area model for forecasting of surface meteorological variables[J]. Communications Earth & Environment, 2025, 6(1): 372. doi: 10.1038/s43247-025-02347-5. [63] 王俊, 郑彤, 雷鹏, 等. 深度学习在雷达中的研究综述[J]. 雷达学报, 2018, 7(4): 395–411. doi: 10.12000/JR18040.WANG Jun, ZHENG Tong, LEI Peng, et al. Study on deep learning in radar[J]. Journal of Radars, 2018, 7(4): 395–411. doi: 10.12000/JR18040. [64] 黄钟泠, 姚西文, 韩军伟. 面向SAR图像解译的物理可解释深度学习技术进展与探讨[J]. 雷达学报, 2022, 11(1): 107–125. doi: 10.12000/JR21165.HUANG Zhongling, YAO Xiwen, and HAN Junwei. Progress and perspective on physically explainable deep learning for synthetic aperture radar image interpretation[J]. Journal of Radars, 2022, 11(1): 107–125. doi: 10.12000/JR21165. [65] 闫文君, 刘康晟, 凌青, 等. 跨场景辐射源个体识别技术综述[J]. 雷达学报(中英文), 待出版. doi: 10.12000/JR25166.YAN Wenjun, LIU Kangsheng, LING Qing, et al. Survey of cross-scenario specific emitter identification technology[J]. Journal of Radars. in press, doi: 10.12000/JR25166. [66] 万显荣, 易建新, 占伟杰, 等. 基于多照射源的被动雷达研究进展与发展趋势[J]. 雷达学报, 2020, 9(6): 939–958. doi: 10.12000/JR20143.WAN Xianrong, YI Jianxin, ZHAN Weijie, et al. Research progress and development trend of the multi-illuminator-based passive radar[J]. Journal of Radars, 2020, 9(6): 939–958. doi: 10.12000/JR20143. [67] LEVIE R, YAPAR Ç, KUTYNIOK G, et al. RadioUNet: Fast radio map estimation with convolutional neural networks[J]. IEEE Transactions on Wireless Communications, 2021, 20(6): 4001–4015. doi: 10.1109/TWC.2021.3054977. [68] LEE J H, SERBETCI O G, SELVAM D P, et al. PMNet: Robust pathloss map prediction via supervised learning[C]. Global Communications Conference, Kuala Lumpur, Malaysia, 2023: 4601–4606. doi: 10.1109/GLOBECOM54140.2023.10437562. [69] CHEN Guokai, LIU Yongxiang, ZHANG Tao, et al. A graph neural network based radio map construction method for urban environment[J]. IEEE Communications Letters, 2023, 27(5): 1327–1331. doi: 10.1109/LCOMM.2023.3260272. [70] CHAVES-VILLOTA A and VITERI-MERA C A. DeepREM: Deep-learning-based radio environment map estimation from sparse measurements[J]. IEEE Access, 2023, 11: 48697–48714. doi: 10.1109/ACCESS.2023.3277248. [71] LUO Xuanhao, ZHIZHEN L, PENG Zhiyuan, et al. RM-Gen: Conditional diffusion model-based radio map generation for wireless networks[C]. 2024 IFIP Networking Conference, Thessaloniki, Greece, 2024: 543–548. doi: 10.23919/IFIPNetworking62109.2024.10619829. [72] WANG Xiucheng, TAO Keda, CHENG Nan, et al. RadioDiff: An effective generative diffusion model for sampling-free dynamic radio map construction[J]. IEEE Transactions on Cognitive Communications and Networking, 2025, 11(2): 738–750. doi: 10.1109/TCCN.2024.3504489. [73] JIANG TAO, GELLER J, NI Daiheng, et al. Unmanned aircraft system traffic management: concept of operation and system architecture[J]. International Journal of Transportation Science and Technology, 2016, 5(3): 123–135. doi: 10.1016/j.ijtst.2017.01.004. [74] 广东省通信学会, 中国信息通信研究院, 中国联合网络通信有限公司广东省分公司. 2024低空智联网发展研究报告[R]. 2024.Guangdong Communication Society, China Academy of Information and Communications Technology, and China United Network Communications Group Co., Ltd. Guangdong Branch. 2024 research report on the development of low-altitude intelligent network[R]. 2024. [75] 张学军, 刘法旺, 张祖耀, 等. 低空智能网联体系[J]. 北京航空航天大学学报, 2025, 51(6): 1793–1815. doi: 10.13700/j.bh.1001-5965.2025.0060.ZHANG Xuejun, LIU Fawang, ZHANG Zuyao, et al. Overview of low-altitude intelligent networked system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(6): 1793–1815. doi: 10.13700/j.bh.1001-5965.2025.0060. [76] LIU Yue, TIAN Yunjie, ZHAO Yuzhong, et al. VMamba: Visual state space model[C]. The 38th International Conference on Neural Information Processing Systems, Vancouver, Canada, 2024: 3273. doi: 10.52202/079017-3273. [77] WANG Zhaozhi, LIU Yue, TIAN Yunjie, et al. Building vision models upon heat conduction[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2025: 9707–9717. [78] 陈翔, 汪连栋, 许雄, 等. 基于Raw I/Q和深度学习的射频指纹识别方法综述[J]. 雷达学报, 2023, 12(1): 214–234. doi: 10.12000/JR22140.CHEN Xiang, WANG Liandong, XU Xiong, et al. A review of radio frequency fingerprinting methods based on Raw I/Q and deep learning[J]. Journal of Radars, 2023, 12(1): 214–234. doi: 10.12000/JR22140. [79] FANG Zheng, LIU Kangjun, CHEN Ke, et al. RadioFormer: A multiple-granularity radio map estimation transformer with 1‰ spatial sampling[EB/OL]. https://arxiv.org/abs/2504.19161, 2025. [80] FENG Wenzhi, LI Xutao, WU Zhe, et al. Perceptually constrained precipitation nowcasting model[C]. The Forty-Second International Conference on Machine Learning, Vancouver, Canada, 2025. [81] GAO Zhangyang, TAN Cheng, WU Lirong, et al. SimVP: Simpler yet better video prediction[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, Louisiana, USA, 2022: 3170–3180. doi: 10.1109/CVPR52688.2022.00317. [82] CAO Guiping, LUO Shengda, HUANG Wenjian, et al. Strip-MLP: Efficient token interaction for vision MLP[C]. The IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 1494–1504. doi: 10.1109/ICCV51070.2023.00144. [83] 张寅, 张平, 庹兴宇, 等. 扫描雷达未知天线方向图误差下的稀疏目标角超分辨重建方法[J]. 雷达学报(中英文), 2024, 13(3): 646–666. doi: 10.12000/JR23208.ZHANG Yin, ZHANG Ping, TUO Xingyu, et al. Sparse targets angular super-resolution reconstruction method under unknown antenna pattern errors for scanning radar[J]. Journal of Radars, 2024, 13(3): 646–666. doi: 10.12000/JR23208. [84] CAO Guiping, HUANG Wenjian, LAN Xiangyuan, et al. Cross-DINO: Cross the deep MLP and transformer for small object detection[J]. IEEE Transactions on Multimedia, 2025, 27: 7369–7379. doi: 10.1109/TMM.2025.3599074. [85] 万昊, 梁菁. 基于多重对比损失的雷达传感器网络HRRP无监督目标特征提取方法[J]. 雷达学报(中英文), 2025, 14(5): 1294–1305. doi: 10.12000/JR24200.WAN Hao and LIANG Jing. HRRP unsupervised target feature extraction method based on multiple contrastive loss in radar sensor networks[J]. Journal of Radars, 2025, 14(5): 1294–1305. doi: 10.12000/JR24200. [86] CAO Guiping, WANG Tao, HUANG Wenjian, et al. Open-Det: An efficient learning framework for open-ended detection[C]. The 42nd International Conference on Machine Learning, Vancouver, Canada. 2025: 6654–6674. [87] AGRIM G, PIOTR D, and ROSS G. LVIS: A dataset for large vocabulary instance segmentation[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 5351–5359. doi: 10.1109/CVPR.2019.00550. [88] LIU Shilong, ZENG Zhaoyang, REN Tianhe, et al. Grounding DINO: Marrying DINO with grounded pre-training for open-set object detection[C]. The 18th European Conference on Computer Vision, Milan, Italy, 2024: 38–55. doi: 10.1007/978-3-031-72970-6_3. [89] LIN Chuang, JIANG Yi, QU Lizhen, et al. Generative region-language pretraining for open-ended object detection[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2024: 13958–13968. doi: 10.1109/CVPR52733.2024.01324. [90] XIAO Linhui, YANG Xiaoshan, PENG Fang, et al. HiVG: Hierarchical multimodal fine-grained modulation for visual grounding[C]. The 32nd ACM International Conference on Multimedia, Melbourne, Australia, 2024: 5460–5469. doi: 10.1145/3664647.3681071. [91] XIAO Linhui, YANG Xiaoshan, PENG Fang, et al. OneRef: Unified one-tower expression grounding and segmentation with mask referring modeling[C]. The 38th International Conference on Neural Information Processing Systems, Vancouver, Canada, 2024: 4438. doi: 10.52202/079017-4438. [92] LI Xin, HUANG Yuqing, HE Zhenyu, et al. CiteTracker: Correlating image and text for visual tracking[C]. The IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 9974–9983. doi: 10.1109/ICCV51070.2023.00915. [93] 徐开明, 王佰录, 李溯琪, 等. 低空监视雷达“走-停-走”目标跟踪技术[J]. 雷达学报, 2022, 11(3): 443–458. doi: 10.12000/JR21211.XU Kaiming, WANG Bailu, LI Suqi, et al. Move-stop-move target tracking with low-altitude surveillance radars[J]. Journal of Radars, 2022, 11(3): 443–458. doi: 10.12000/JR21211. [94] HUANG Yuqing, LI Xin, ZHOU Zikun, et al. RTracker: Recoverable tracking via pn tree structured memory[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2024: 19038–19047. doi: 10.1109/cvpr52733.2024.01801. [95] XU Guangning, NG M K, YE Yunming, et al. TLS-MWP: A tensor-based long- and short-range convolution for multiple weather prediction[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2024, 34(9): 8382–8397. doi: 10.1109/TCSVT.2024.3379291. [96] TAN Cheng, GAO Zhangyang, WU Lirong, et al. Temporal attention unit: Towards efficient spatiotemporal predictive learning[C]. The IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 18770–18782. doi: 10.1109/CVPR52729.2023.01800. [97] CHEN Taiqin, ZHOU Zikun, FANG Zheng, et al. RadioDUN: A physics-inspired deep unfolding network for radio map estimation[EB/OL]. https://arxiv.org/abs/2506.08418, 2025. [98] LIU Kangjun, QIU Chunyan, CHEN Ke, et al. Paying deformable attention to sparse spatial observations for deep radio map estimation[J]. IEEE Transactions on Cognitive Communications and Networking, 2026, 12: 1436–1450. doi: 10.1109/TCCN.2025.3613520. [99] ZHANG Shuhang, LIU Qingyu, CHEN Ke, et al. Large models for aerial edges: An edge-cloud model evolution and communication paradigm[J]. IEEE Journal on Selected Areas in Communications, 2025, 43(1): 21–35. doi: 10.1109/JSAC.2024.3460078. [100] DU Dawei, ZHU Pengfei, WEN Longyin, et al. VisDrone-DET2019: The vision meets drone object detection in image challenge results[C]. The IEEE/CVF International Conference on Computer Vision Workshop, Seoul, Korea, 2019: 213–226. doi: 10.1109/ICCVW.2019.00030. [101] TEKIN B, SINHA S N, and FUA P. Real-time seamless single shot 6d object pose prediction[C]. The 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 292–301. doi: 10.1109/CVPR.2018.00038. [102] ZHOU Xingyi, WANG Dequan, and KRÄHENBÜHL P. Objects as points[EB/OL]. https://arxiv.org/abs/1904.07850, 2019. -

计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

