
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Horizon Tracking Algorithm for Chang’E-4 Lunar Surface Penetrating Radar Based on Dynamic Search Center
-
摘要: 月球浅表层结构是理解月球地质演化、物质组成及空间风化过程的重要窗口。随着嫦娥工程等国内外探月任务获得大量雷达数据,月壤层状结构与物性特征的精细刻画成为月球科学研究的重点与难点之一。鉴于现有雷达层位识别与追踪方法在复杂散射环境下易受噪声和非均一性地质条件的影响,该文提出一种基于动态搜索中心的层位自动追踪算法。该算法引入高斯加权预测机制实现历史趋势与当前信号间的平衡,并采用多特征融合决策函数增强噪声环境下的追踪鲁棒性。模拟实验结果表明,当搜索半径l = 20、历史窗口n = 20 时,算法在浅层(<140 ns)层位识别误差小于2%;针对深层(>170 ns)信号衰减问题,引入边缘方向权重可将追踪误差降低30%以上。将所提算法应用于嫦娥四号实测数据,实现了测月雷达剖面层位的自动拾取,所得分层结果与前人研究高度吻合。算法在数值模拟与任务实测穿透雷达数据中均表现优异,能够准确识别不同介质与复杂形态下的真实层位,抑制噪声并保持路径平滑。综上,该文提出的算法实现了低人工依赖、高鲁棒性与高精度的层位自动追踪,对精确识别未来嫦娥7号月球任务与火星浅表层雷达数据中的地下结构,具有重要参考价值。Abstract: The Moon’s shallow subsurface structure provides crucial insights into its geological evolution, material composition, and space weathering processes. With the acquisition of extensive radar datasets from recent lunar exploration programs, such as the Chang’E missions, high-resolution characterization of the lunar regolith’s stratigraphic and physical properties has become a focus and challenge in lunar science. Conventional radar layer identification and tracking methods often suffer from instability in complex scattering environments, because of their sensitivity to noise and subsurface heterogeneity. To address these limitations, this study proposes an automatic layer-tracking algorithm based on a Dynamic Search Center (DSC) approach. This algorithm employs a Gaussian-weighted prediction mechanism to balance historical trajectory trends with local signal responses and uses a multifeatured fusion decision scheme to enhance tracking robustness under noisy conditions. Numerical simulations demonstrate that, with a search radius l = 20 and a historical window n = 20, the algorithm achieves a layer identification error of less than 2% for shallow strata (<140 ns). Meanwhile, for deep layers (>170 ns), with considerable signal attenuation, incorporating an edge-direction weighting term reduces the tracking error by over 30%. When applied to lunar penetrating radar data from the Chang’E-4 mission, the proposed method successfully realizes automatic stratigraphic tracing in lunar radar profiles, producing layer boundaries that are highly consistent with previous interpretations. Simulation and in-situ results confirm that the DSC-based algorithm accurately delineates real subsurface interfaces across media and structural morphologies, effectively suppressing noise, while maintaining smooth trajectories. Overall, the proposed method achieves low manual dependence, high robustness, and high precision in automatic radar layer tracking, thereby providing a valuable reference for analyzing radar data from upcoming missions such as Chang’E-7 and Martian shallow-subsurface explorations.
-
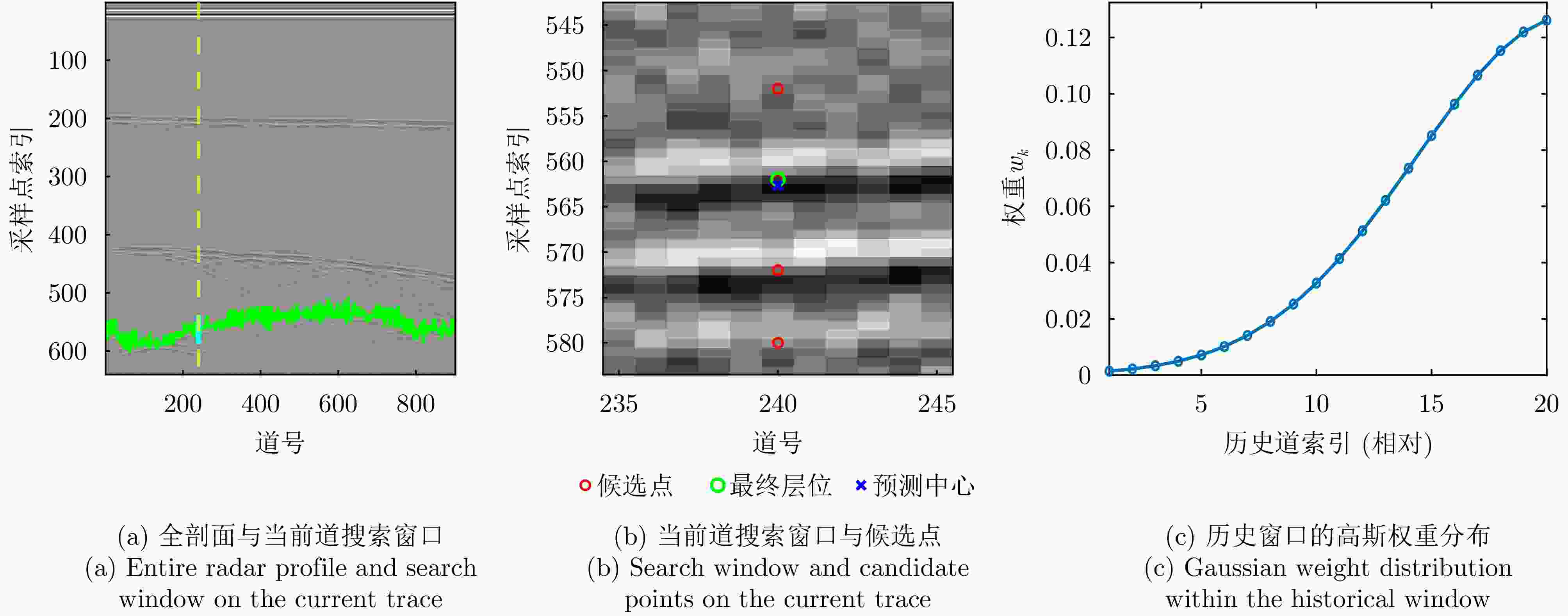
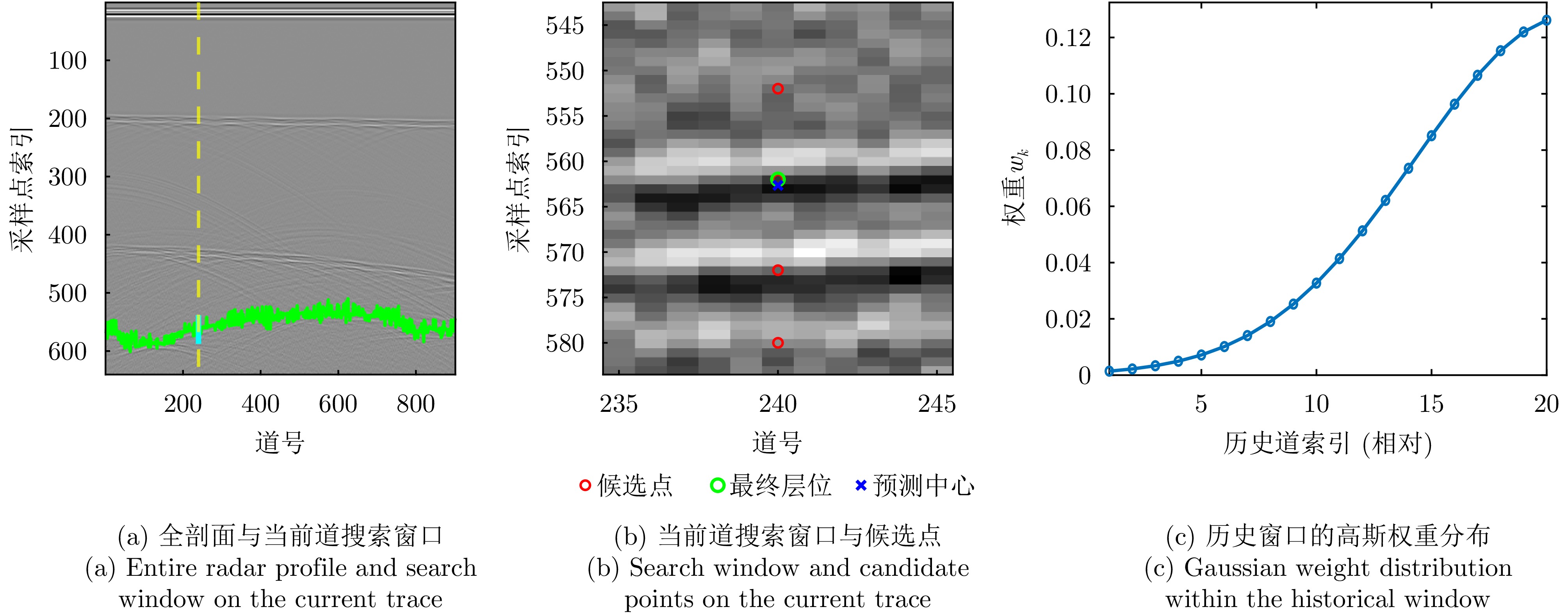
图 1 基于高斯分布的动态搜索更新机制示意图
Figure 1. Schematic of the dynamic search-center update mechanism based on a Gaussian distribution
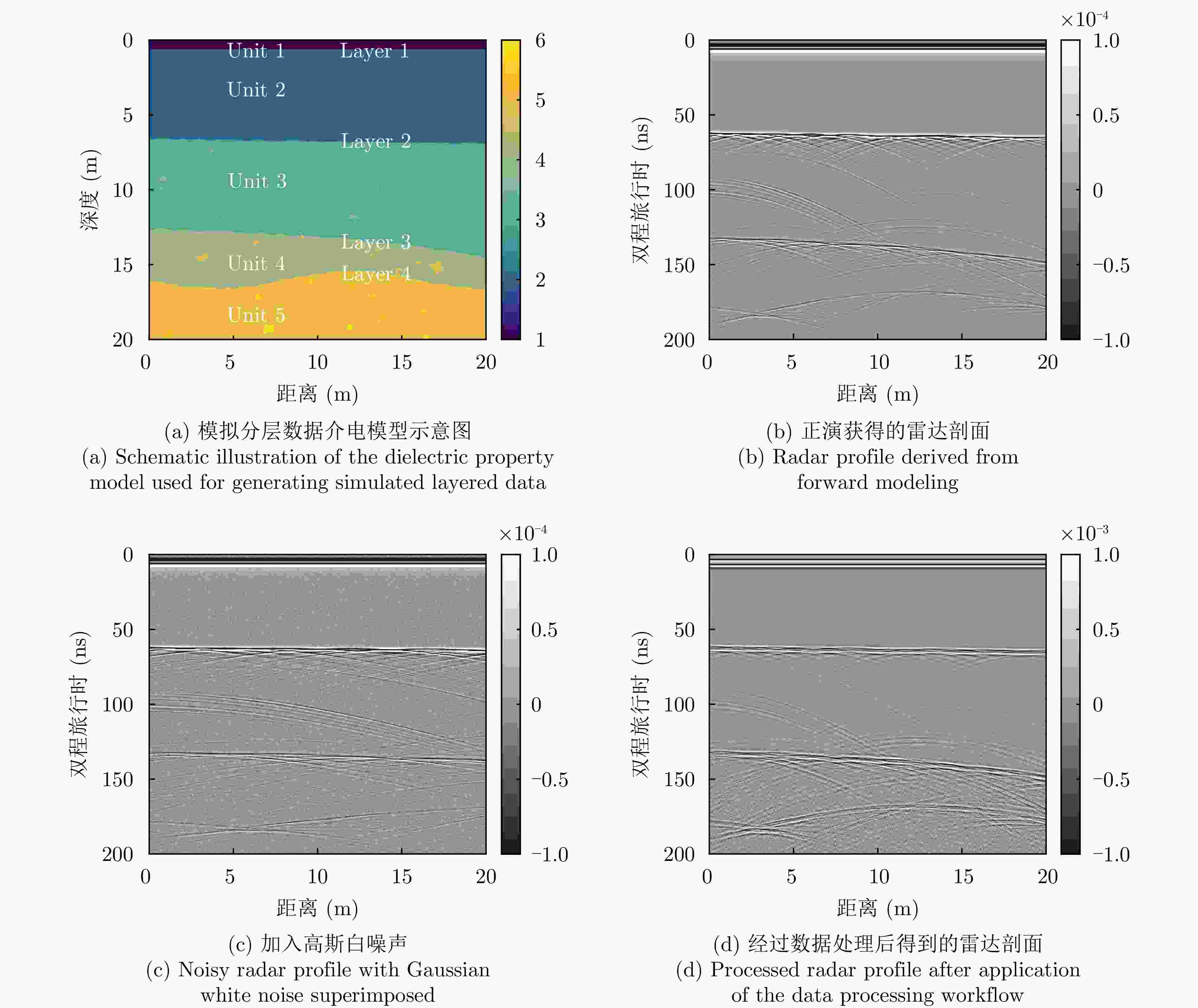
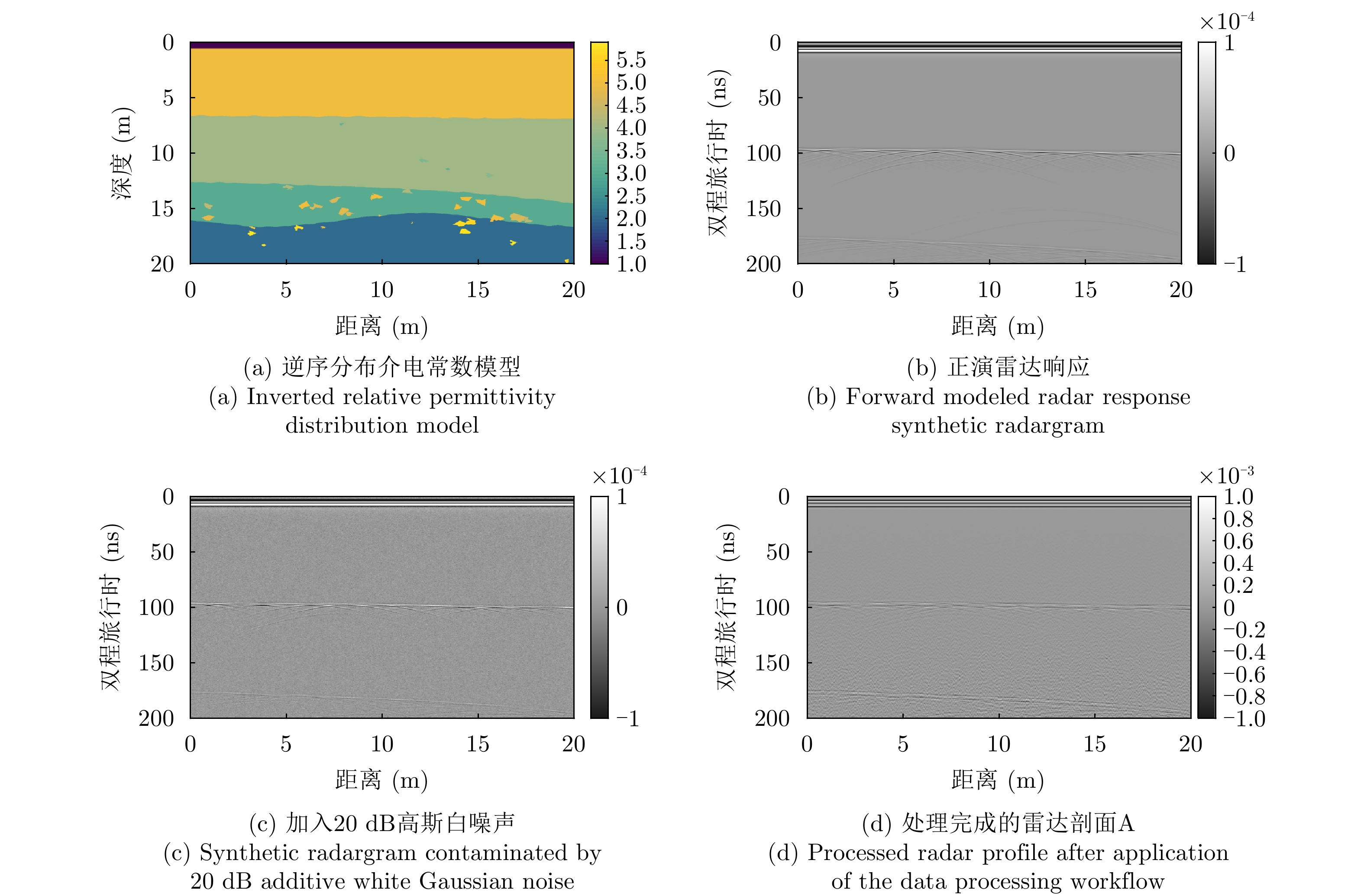
图 2 基于FDTD的雷达响应正演与合成数据生成
Figure 2. FDTD forward radar response modeling and synthetic data generation
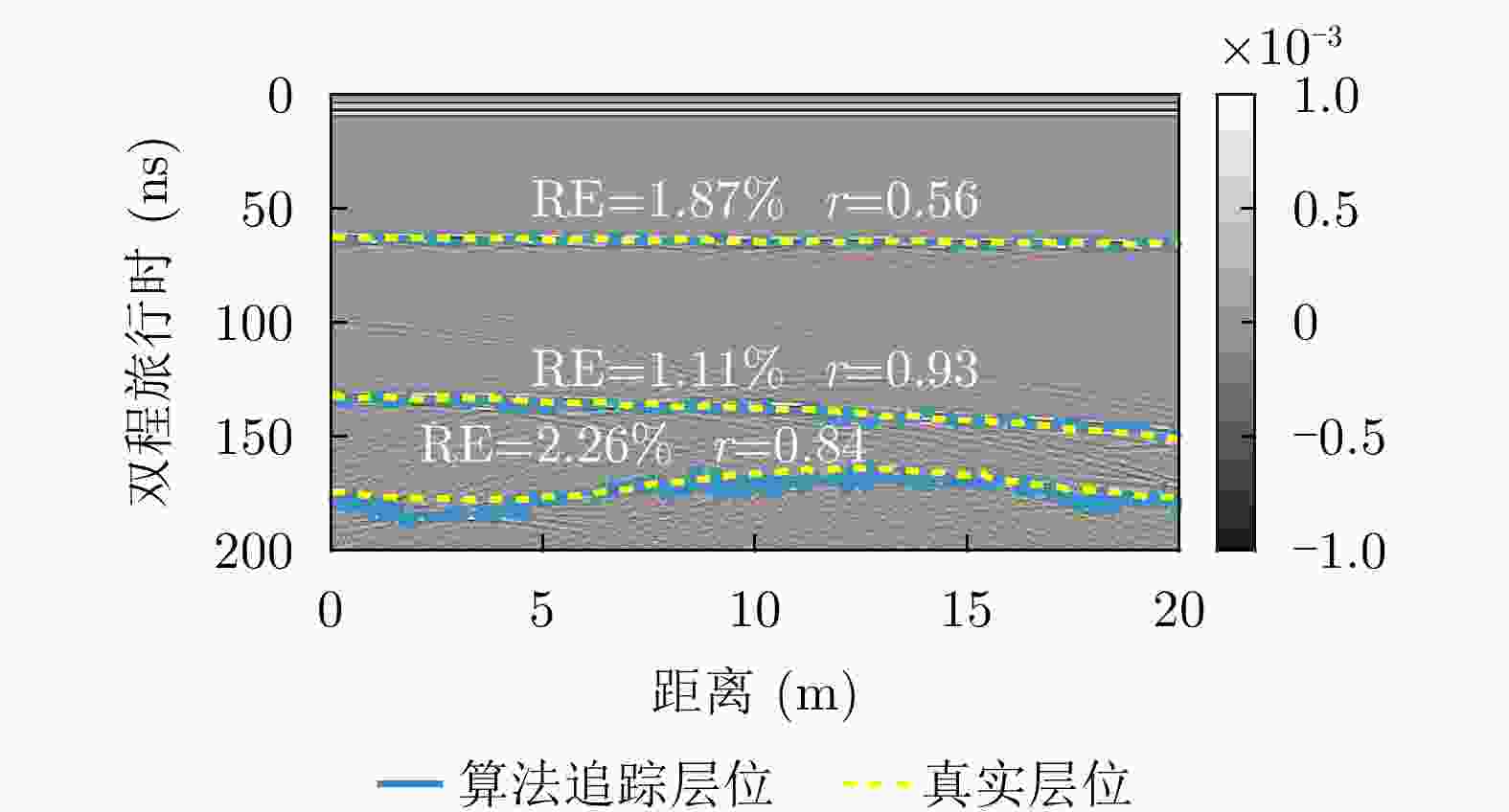
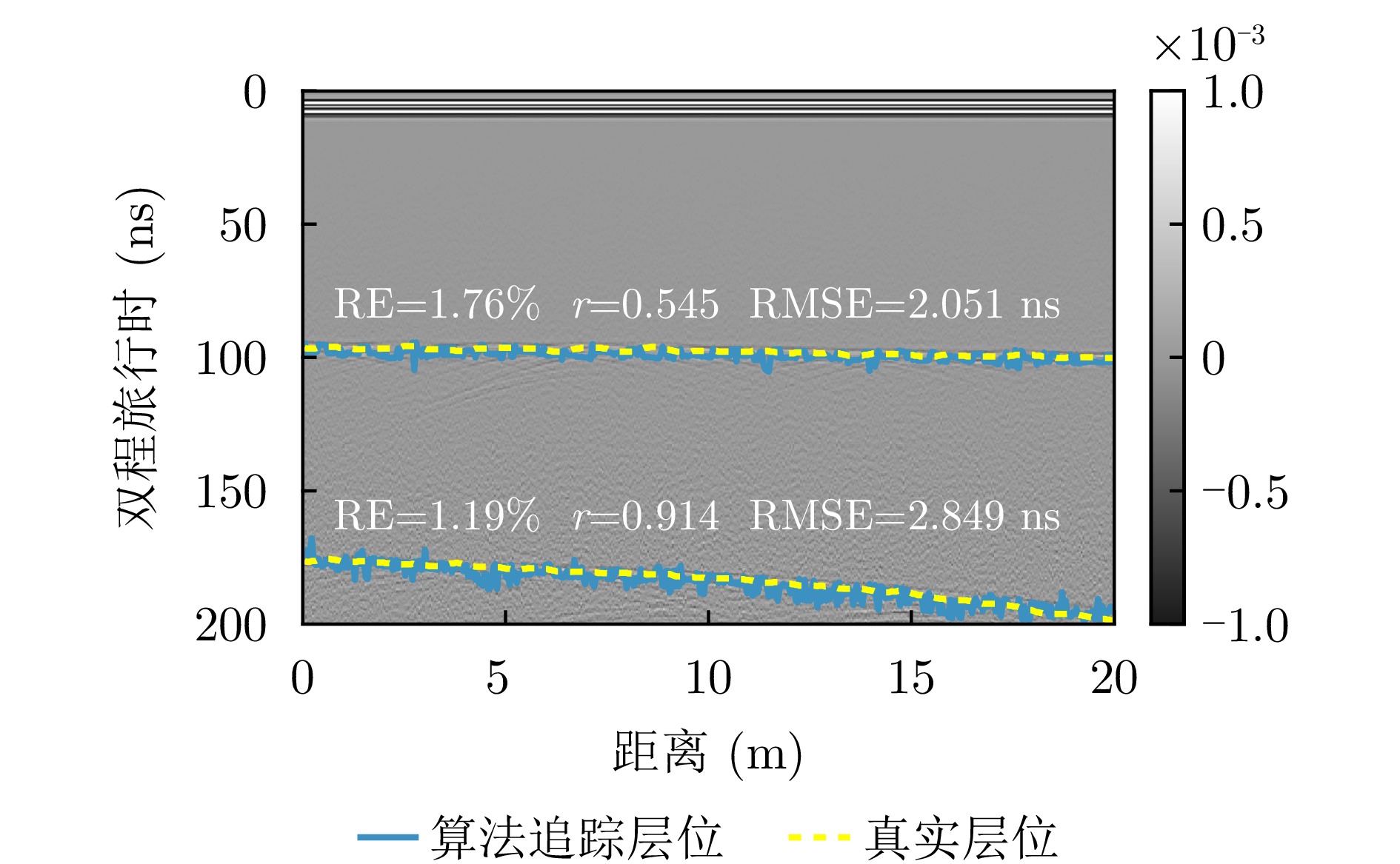
图 3 动态搜索中心算法在模拟数据的层位追踪结果
Figure 3. Horizon tracking results of the dynamic search center algorithm on simulated data
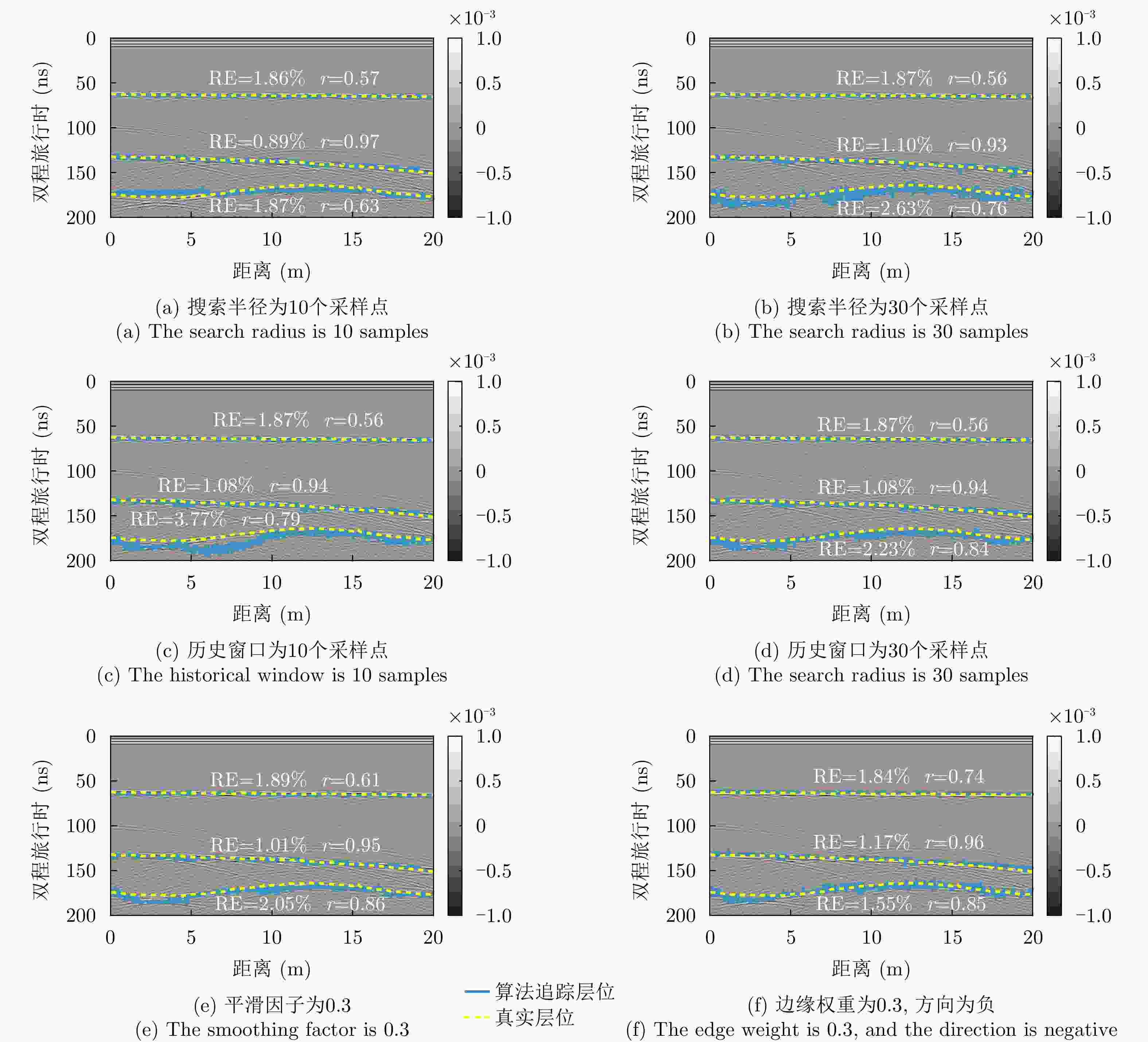
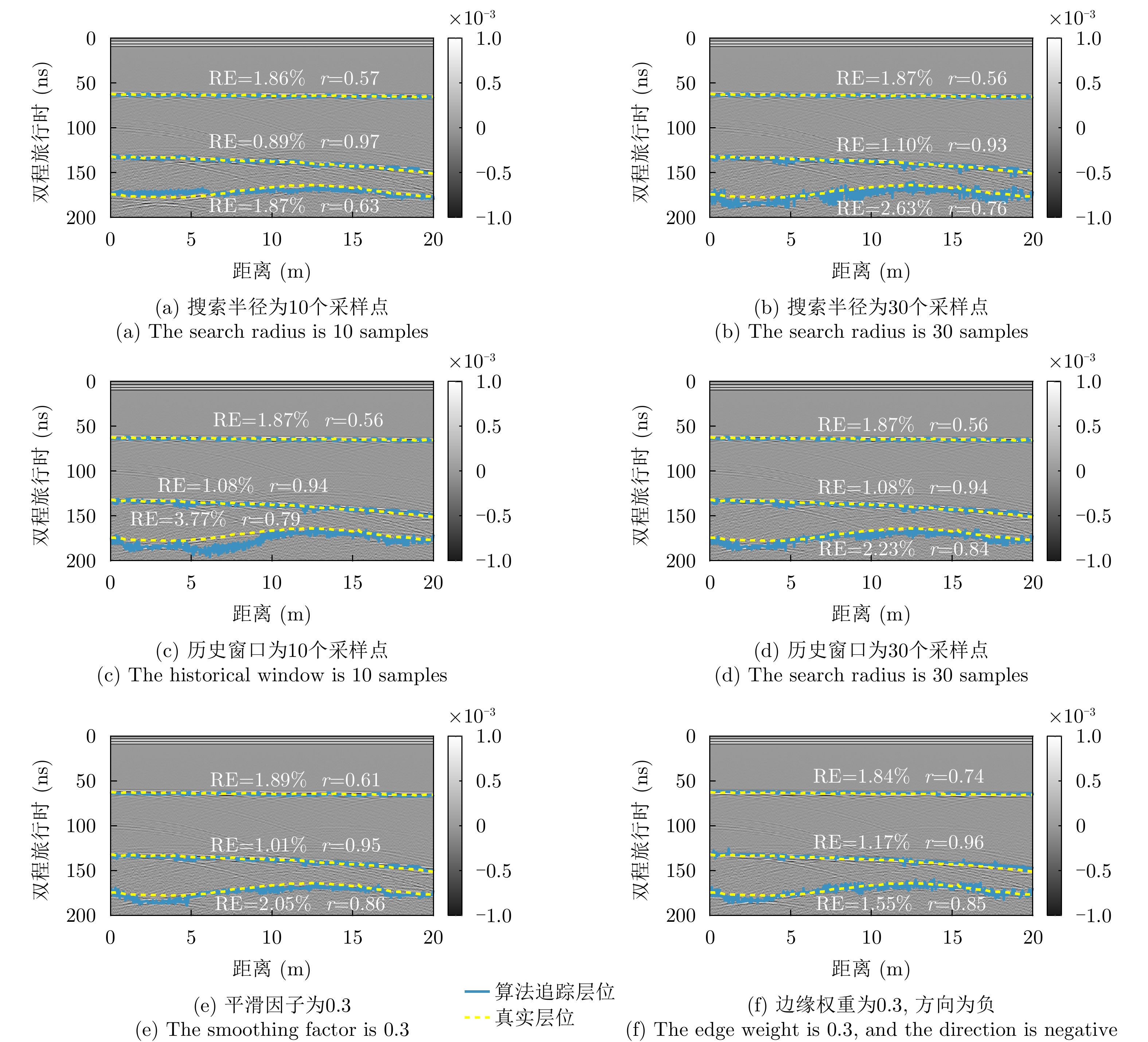
图 4 不同参数下算法的层位追踪结果
Figure 4. Horizon tracking results of the algorithm under different parameter settings
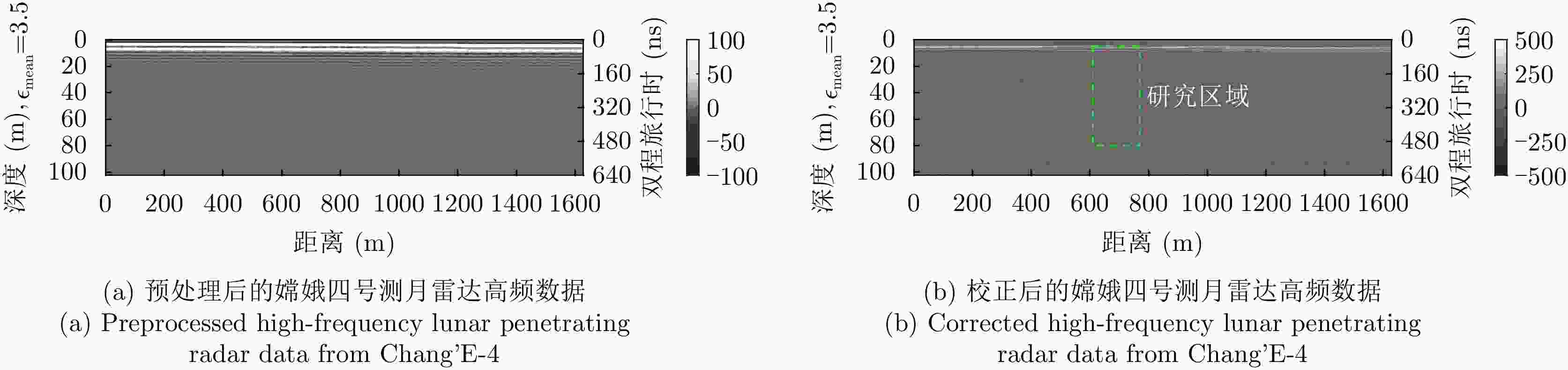
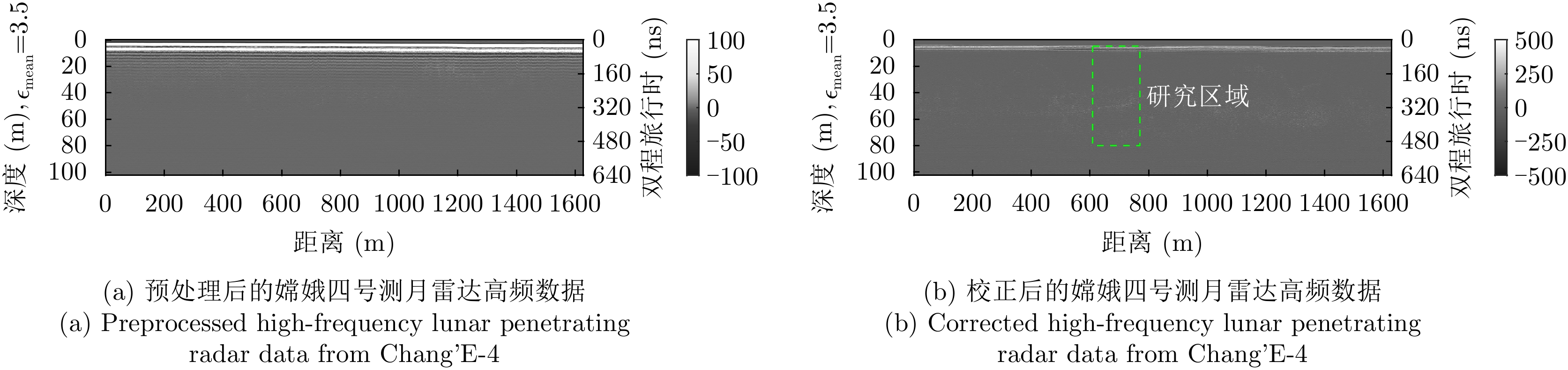
图 5 嫦娥四号月球雷达高频通道实测数据
Figure 5. Measured high-frequency channel data from the Chang’E-4 lunar penetrating radar
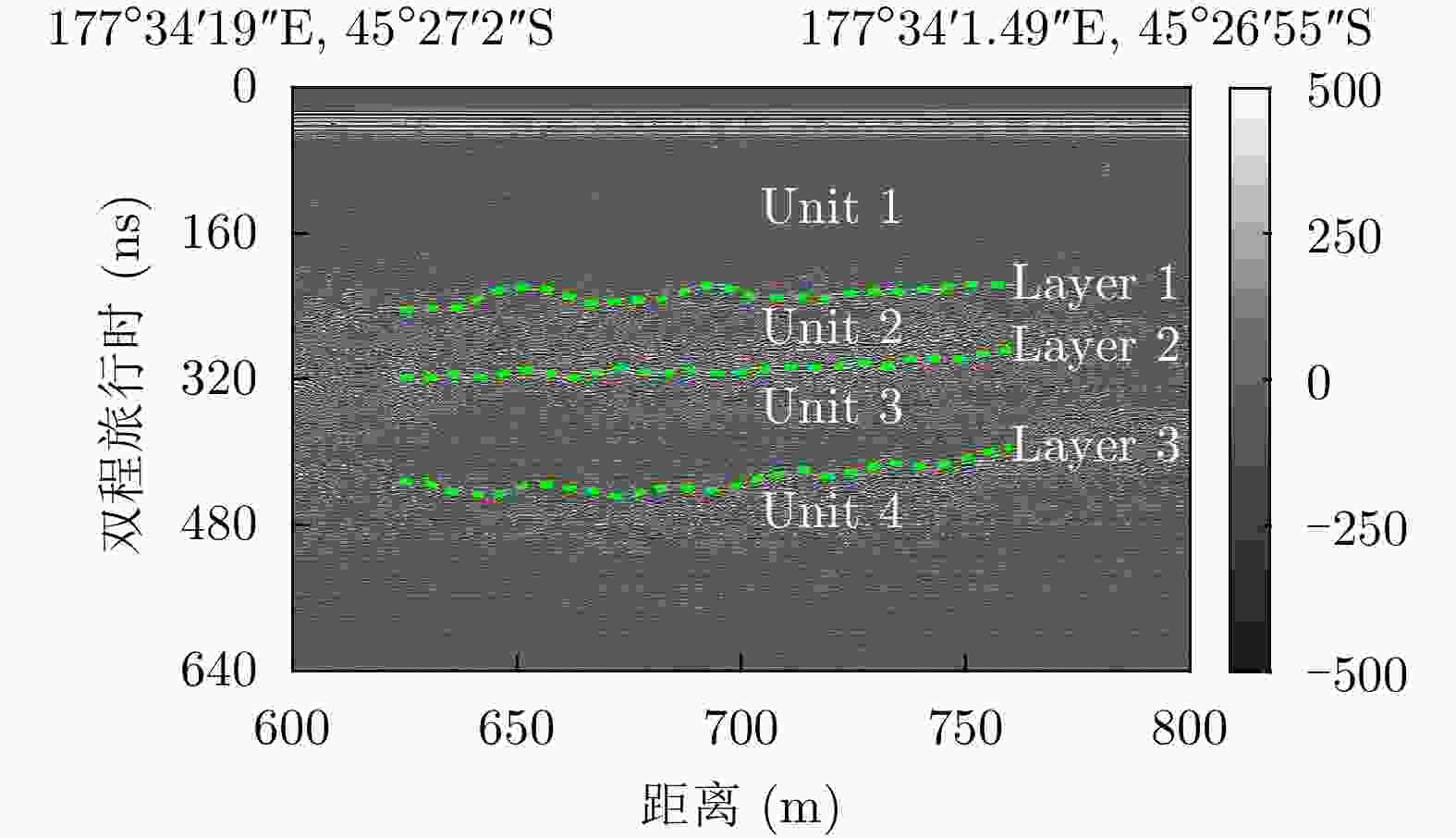
图 6 玉兔二号行进路线600~800 m处测月雷达CH-2数据(绿色虚线为算法追踪得到的层位分界线)
Figure 6. CH-2 lunar penetrating radar data from the 600~800 m segment of the Yutu-2 traverse route, where the green dashed lines indicate the horizon boundaries identified by the algorithm
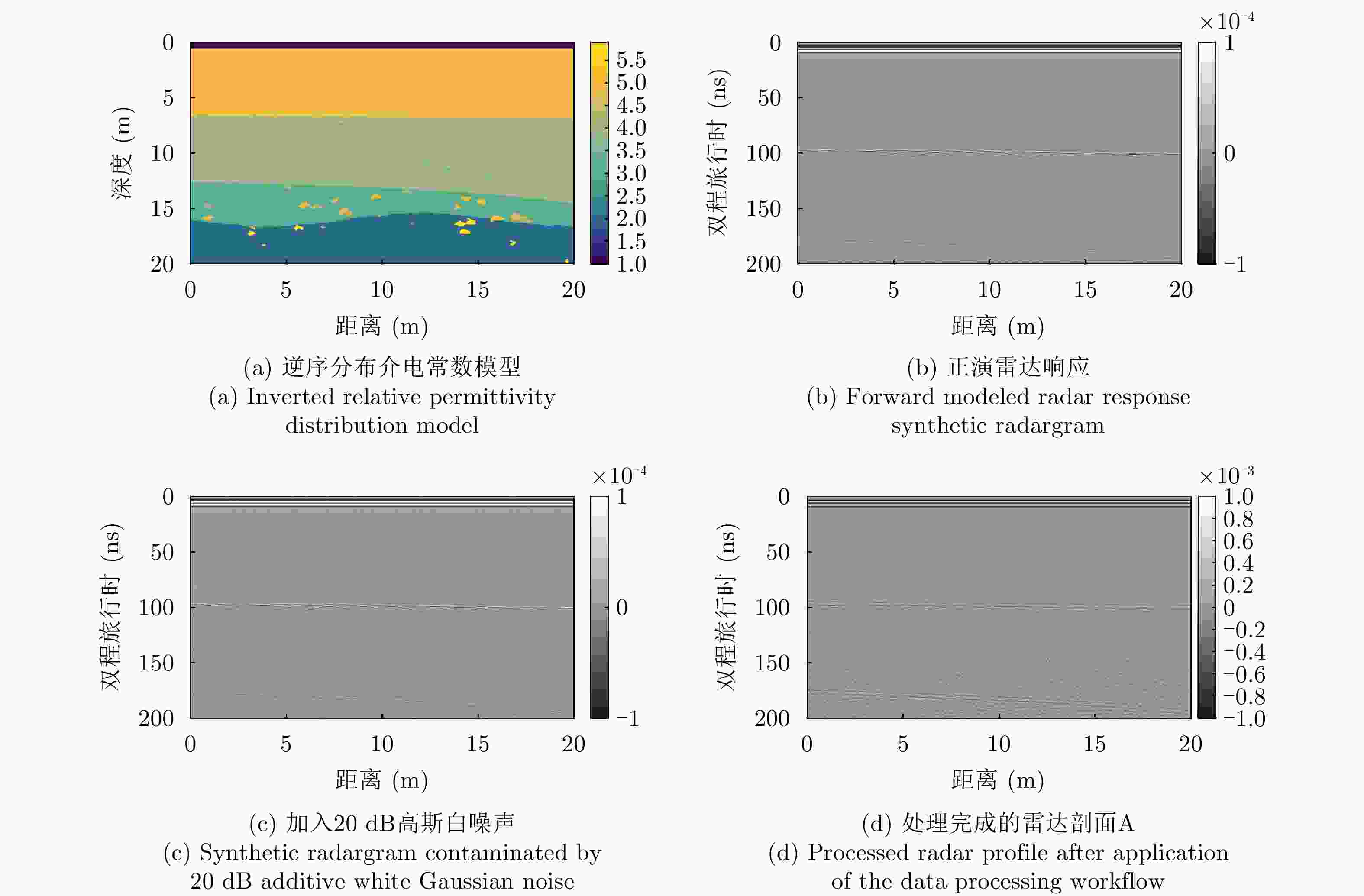
1 逆序分布介电常数模型及其正演雷达响应示意
1. Schematic of a dielectric constant reverse-distribution model and the corresponding forward radar response
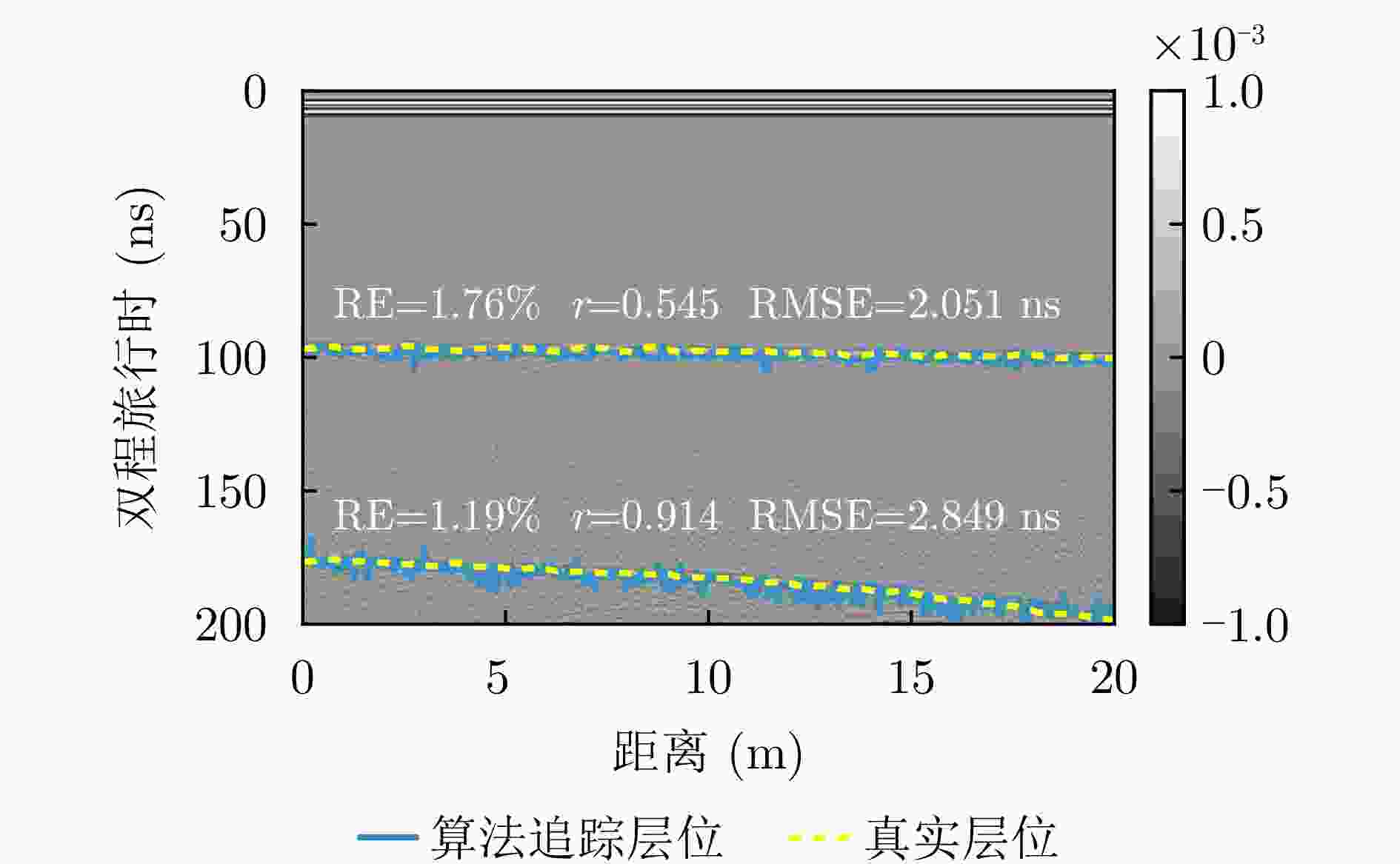
2 逆序分布介电常数模型的层位追踪结果对比
2. Comparison of horizon tracking results for the reverse distribution dielectric constant model (solid lines: algorithm results; dashed lines: true horizons)
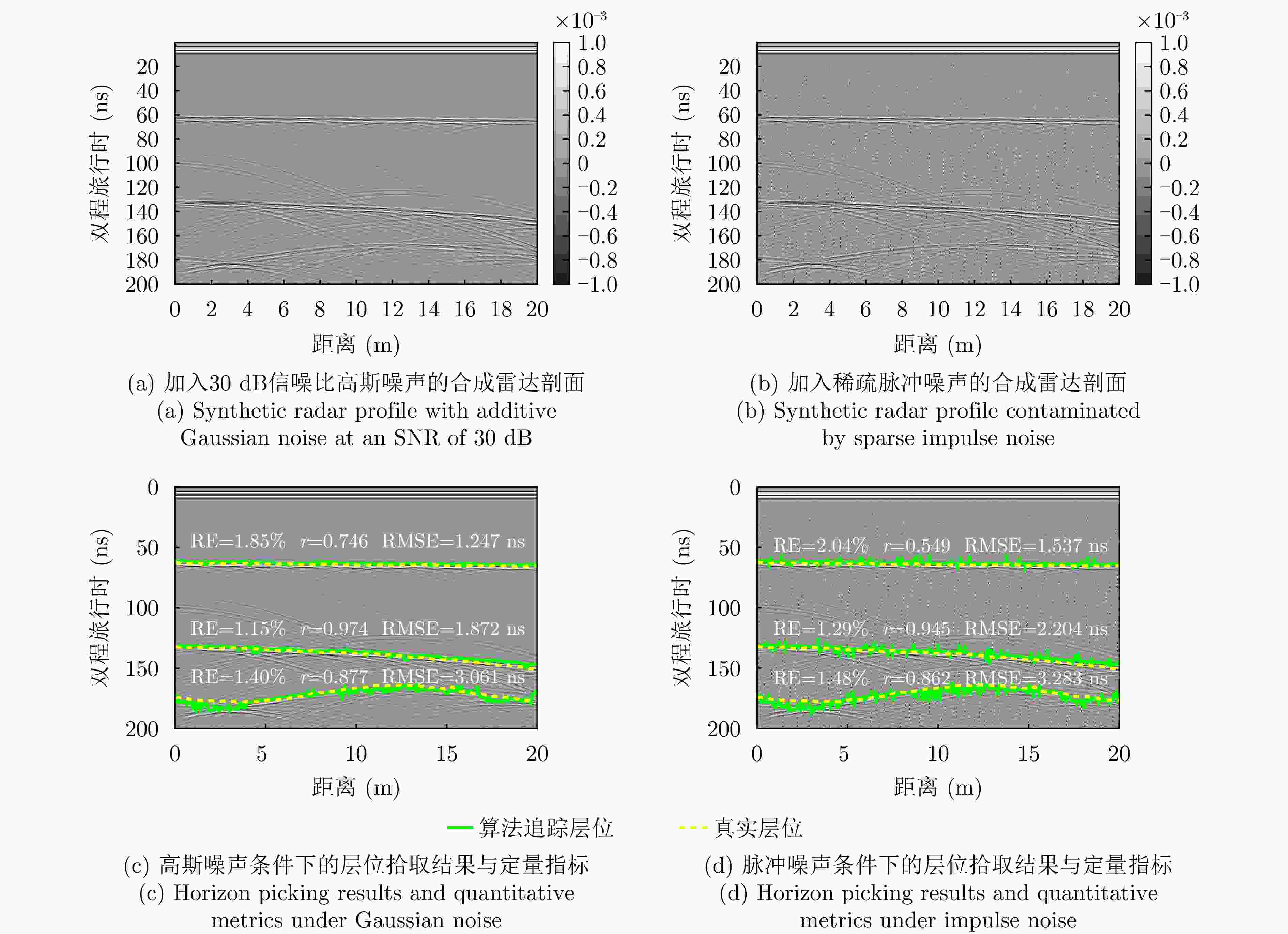
3 噪声扰动下层位拾取算法的鲁棒性评估
3. Robustness evaluation of horizon picking under noise perturbations
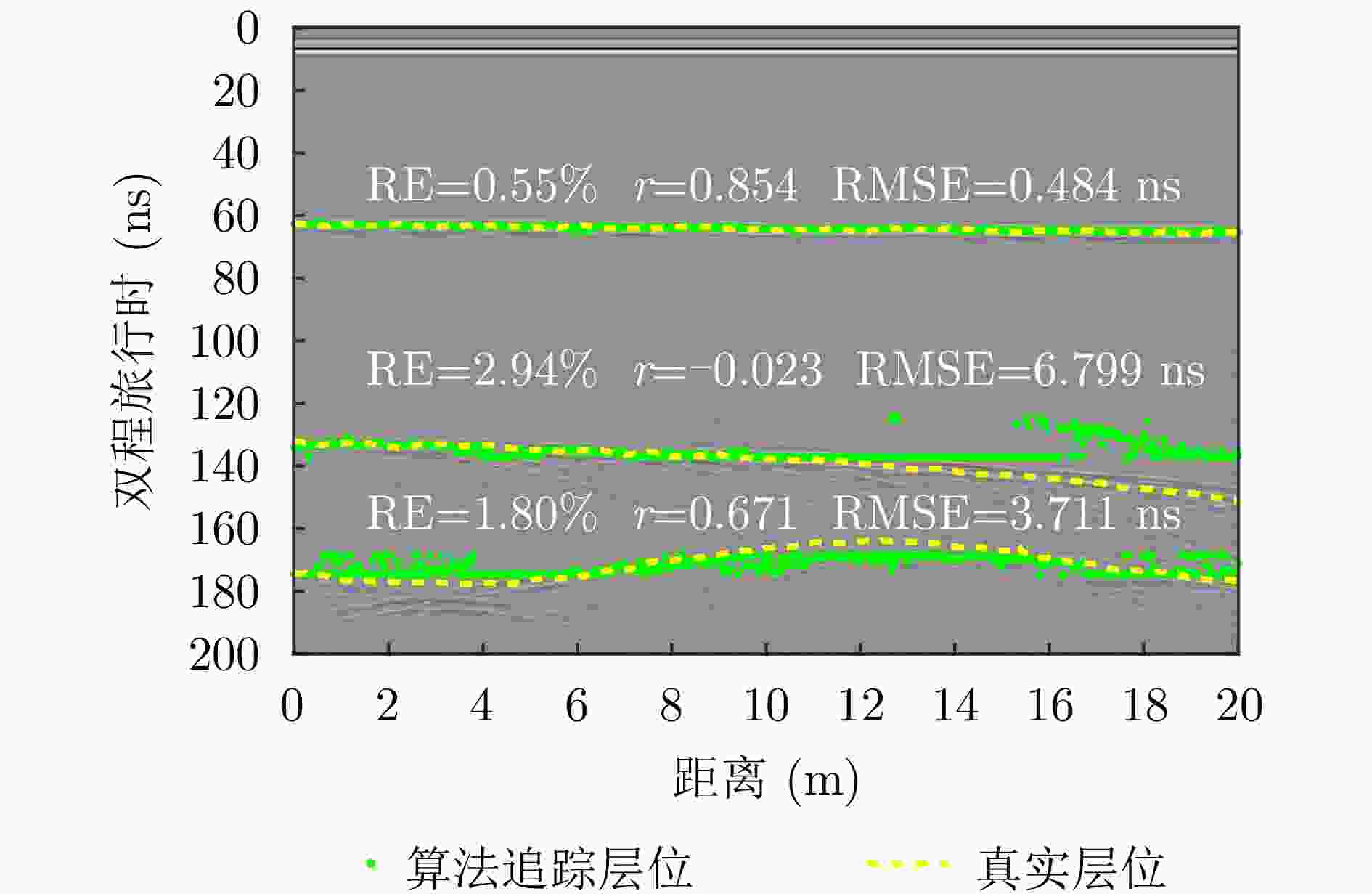
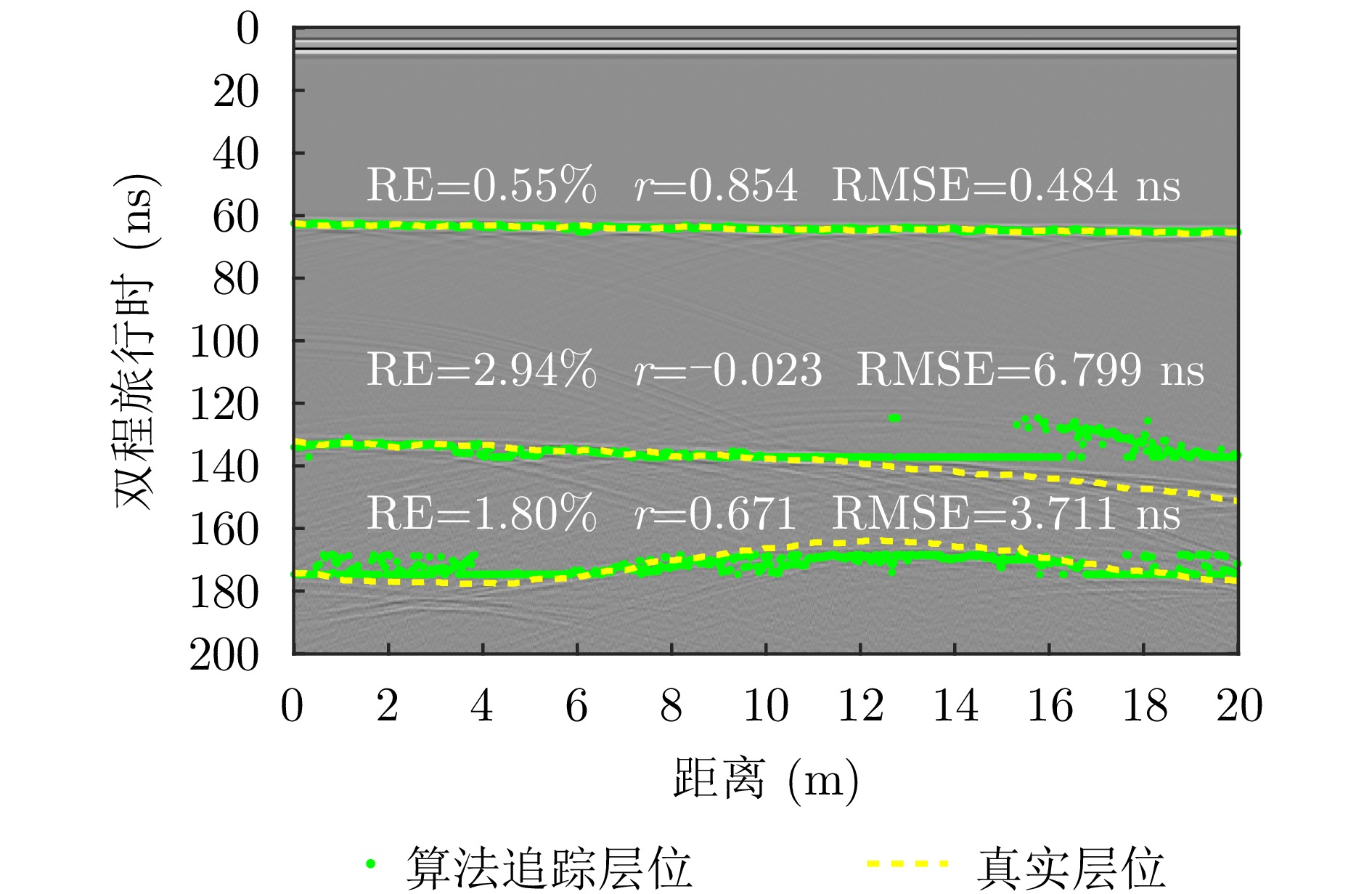
4 基于能量检测自动拾取算法的层位追踪结果
4. Horizon tracking results of the energy-based automatic picking algorithm
1 动态搜索中心层位追踪算法
1. Dynamic search center horizon tracking algorithm
输入:处理完成的雷达剖面矩阵,搜索半径$ {l} $,历史窗口长度
$ {n} $,权重$ {\lambda } $, ${\alpha } $输出:层位轨迹 1. 初始化首道层位位置 $ {{{{y}}_{{1}}}}_{\leftarrow }{\arg } {\max } {{E}}_{{1}}\left({t}\right) $ 2. for $ {j}={2} $ to $ {N} $ do 3. 提取第$ {j} $道信号$ {{s}}_{{j}}\left({t}\right) $,计算包络$ {{E}}_{{j}}\left({t}\right) $ //式(4),式(5) 4. 计算动态搜索中心$ {\bar{{y}}_{{j}}} $ //式(6) 5. 确定搜索窗口$ \left[{\max } \left({0},{\bar{{y}}_{{j}}}-{l}\right),{\min } \left({T},{\bar{{y}}_{{j}}}+{l}\right)\right] $ //确保搜索
窗口在雷达数据矩阵的范围内6. 检测局部极大值点集$ {\mathcal{C}}_{j}={c}_{m}|{E}_{j}\left({c}_{m}\right)\geq {E}_{j}\left({c}_{m}\pm 1\right) $ 7. if $ {\mathcal{C}}_{\rm{j}}={\varnothing } $ then 8. $ {{y}}_{{j}}\leftarrow {\overline{{y}}}_{{j}} $ //无候选点时继承预测值 9. else 10. for每个$ {{c}}_{{m}}\in {{C}}_{{j}} $ do 11. 计算$ {{S}}_{{s}}\left({{c}}_{{m}}\right) $, $ {{S}}_{{g}}\left({\boldsymbol{c}}_{{m}}\right) $, $ {{S}}_{{e}}\left({{c}}_{{m}}\right) $ 12. 计算综合得分$ {{S}}_{\text{total}}\left({{c}}_{{m}}\right) $ //式(7) 13. end for 14. $ {{y}}_{{j}}\leftarrow {{\mathrm{arg}}} {\max}\left({{c}}_{{m}}\right){{S}}_{\text{total}}\left({{c}}_{{m}}\right) $ 15. end if 16. 更新轨迹$ {Y}\leftarrow {Y}\cup {{y}}_{{j}} $ 17. end for  下载: 导出CSV
下载: 导出CSV
表 1 二维分层模型中各单元的物性参数
Table 1. The physical property parameters of each unit in the layered model
单元 介电常数 密度
(g/cm3)损耗角正切 平均电导率
(S/m)平均厚度(m) 下界面平均
双程时延(ns)1 1 0 0 0 0.6 0 2 2 1.05 0.0033 0.00018 6 64.17 3 3 1.67 0.0062 0.00046 6 139.01 4 4 2.11 0.0097 0.00087 3.4 171.50 5 5 2.45 0.0136 0.00139 3 \
下载: 导出CSV
表 2 第4复杂层位自动追踪的参数敏感性分析结果
Table 2. Results of parameter sensitivity analysis for automatic tracking of Layer 4
组合与对应结果 搜索半径 历史窗口 平滑因子 边缘权重与方向 双程平均时延(ns) 误差(%) 相关系数 均方根误差(ns) 1-图2 20 20 0 0, 0 175.01 2.26 0.84 4.7029 2-图3(a) 10 20 0 0, 0 172.00 1.87 0.63 3.7701 3-图3(b) 30 20 0 0, 0 175.31 2.63 0.76 5.5295 4-图3(c) 20 10 0 0, 0 177.86 3.77 0.79 7.8661 5-图3(d) 20 30 0 0, 0 174.96 2.23 0.84 4.6408 6-图3(e) 20 20 0.3 0, 0 174.73 2.05 0.86 4.2807 7-图3(f) 20 20 0 0.3, –1 172.97 1.55 0.85 3.4284
下载: 导出CSV
-
[1] LI Chunlai, SU Yan, PETTINELLI E, et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 lunar penetrating radar[J]. Science Advances, 2020, 6(9): eaay6898. doi: 10.1126/sciadv.aay6898. [2] LAI Jialong, XU Yi, ZHANG Xiaoping, et al. Structural analysis of lunar subsurface with Chang’E-3 lunar penetrating radar[J]. Planetary and Space Science, 2016, 120: 96–102. doi: 10.1016/j.pss.2015.10.014. [3] ZHANG Zongyu, DING Chunyu, SU Yan, et al. Subsoil structure at the Chang’E-6 landing site revealed by in-situ lunar regolith penetrating radar[J]. Communications Earth & Environment, 2025, 6(1): 640. doi: 10.1038/s43247-025-02631-4. [4] DING Chunyu, LI Chunlai, XIAO Zhiyong, et al. Layering structures in the porous material beneath the Chang’E-3 landing site[J]. Earth and Space Science, 2020, 7(10): e2019EA000862. doi: 10.1029/2019EA000862. [5] DING Chunyu, XIAO Zhiyong, SU Yan, et al. Compositional variations along the route of Chang’E-3 Yutu rover revealed by the lunar penetrating radar[J]. Progress in Earth and Planetary Science, 2020, 7(1): 32. doi: 10.1186/s40645-020-00340-4. [6] DING Chunyu, XIAO Zhiyong, and SU Yan. A potential subsurface cavity in the continuous ejecta deposits of the Ziwei crater discovered by the Chang’E-3 mission[J]. Earth, Planets and Space, 2021, 73(1): 53. doi: 10.1186/s40623-021-01359-7. [7] CARRIER III W D, OLHOEFT G R, and MENDELL W. Physical Properties of the Lunar Surface[M]. HEIKEN G, VANIMAN D, and FRENCH B M. Lunar Sourcebook: A User’s Guide to the Moon. Cambridge: Cambridge University Press, 1991: 475–594. [8] COLWELL J E, BATISTE S, HORÁNYI M, et al. Lunar surface: Dust dynamics and regolith mechanics[J]. Reviews of Geophysics, 2007, 45(2): RG2006. doi: 10.1029/2005RG000184. [9] MORGAN P, GROTT M, KNAPMEYER-ENDRUN B, et al. A pre-landing assessment of regolith properties at the InSight landing site[J]. Space Science Reviews, 2018, 214(6): 104. doi: 10.1007/s11214-018-0537-y. [10] RASERA J N, CILLIERS J J, LAMAMY J A, et al. The beneficiation of lunar regolith for space resource utilisation: A review[J]. Planetary and Space Science, 2020, 186: 104879. doi: 10.1016/j.pss.2020.104879. [11] FA Wenzhe. Simulation for ground penetrating radar (GPR) study of the subsurface structure of the Moon[J]. Journal of Applied Geophysics, 2013, 99: 98–108. doi: 10.1016/j.jappgeo.2013.08.002. [12] XU Jiangwan, DING Chunyu, SU Yan, et al. Lunar exploration based on ground-based radar: Current research progress and future prospects[J]. Remote Sensing, 2024, 16(18): 3484. doi: 10.3390/rs16183484. [13] ZHANG Ling, ZENG Zhaofa, LI Jing, et al. Simulation of the lunar regolith and lunar-penetrating radar data processing[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(2): 655–663. doi: 10.1109/JSTARS.2017.2786476. [14] DONG Zehua, FANG Guangyou, ZHAO Di, et al. Dielectric properties of lunar subsurface materials[J]. Geophysical Research Letters, 2020, 47(22): e2020GL089264. doi: 10.1029/2020GL089264. [15] JIA Yingzhuo, ZOU Yongliao, PING Jinsong, et al. The scientific objectives and payloads of Chang’E-4 mission[J]. Planetary and Space Science, 2018, 162: 207–215. doi: 10.1016/j.pss.2018.02.011. [16] LI Chunlai, LIU Jianjun, REN Xin, et al. The Chang’E 3 mission overview[J]. Space Science Reviews, 2015, 190(1): 85–101. doi: 10.1007/s11214-014-0134-7. [17] XIAO Long, QIAN Yuqi, WANG Qian, et al. The Chang’E-5 Mission[M]. LONGOBARDO A. Sample Return Missions: The Last Frontier of Solar System Exploration. Amsterdam: Elsevier, 2021: 195–206. doi: 10.1016/B978-0-12-818330-4.00009-4. [18] SU Yan, WANG Ruigang, DENG Xiangjin, et al. Hyperfine structure of regolith unveiled by Chang’E-5 lunar regolith penetrating radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5110414. doi: 10.1109/TGRS.2022.3148200. [19] SPUDIS P D, BUSSEY D B J, BALOGA S M, et al. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar[J]. Journal of Geophysical Research: Planets, 2013, 118(10): 2016–2029. doi: 10.1002/jgre.20156. [20] GOSWAMI J N and ANNADURAI M. Chandrayaan-1: India’s first planetary science mission to the Moon[J]. Current Science, 2009, 96(4): 486–491. doi: 10.2307/24105456. [21] KUMAR A, KOCHAR I M, PANDEY D K, et al. Dielectric constant estimation of lunar surface using Mini-RF and Chandrayaan-2 SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 4600608. doi: 10.1109/TGRS.2021.3103383. [22] LI Shaobo, ZHAO Jianhu, ZHANG Hongmei, et al. A novel horizon picking method on sub-bottom profiler sonar images[J]. Remote Sensing, 2020, 12(20): 3322. doi: 10.3390/rs12203322. [23] QIU Zhi, ZENG Junyuan, TANG Wenhui, et al. Research on real-time automatic picking of ground-penetrating radar image features by using machine learning[J]. Horticulturae, 2022, 8(12): 1116. doi: 10.3390/horticulturae8121116. [24] WU Chengliang, FENG Bo, SONG Xiaonan, et al. Automatic horizon picking using multiple seismic attributes and Markov decision process[J]. Remote Sensing, 2023, 15(3): 552. doi: 10.3390/rs15030552. [25] DOSSI M, FORTE E, and PIPAN M. Automated reflection picking and polarity assessment through attribute analysis: Theory and application to synthetic and real ground-penetrating radar data[J]. Geophysics, 2015, 80(5): H23–H35. doi: 10.1190/geo2015-0098.1. [26] LI Shaobo, ZHAO Jianhu, ZHANG Hongmei, et al. An integrated horizon picking method for obtaining the main and detailed reflectors on sub-bottom profiler sonar image[J]. Remote Sensing, 2021, 13(15): 2959. doi: 10.3390/rs13152959. [27] LI Shaobo, LI Tie, SUN Aiguo, et al. Automated amplitude and phase attribute-based horizon picking applied to 3-D sub-bottom data[J]. IEEE Journal of Oceanic Engineering, 2025, 50(3): 2355–2368. doi: 10.1109/JOE.2025.3550984. [28] LVOVSKY A I. Fresnel equations[J]. DRIGGERS R G. Encyclopedia of Optical Engineering. New York: Taylor & Francis, 2013, 27: 1–6. doi: 10.1081/E-EOE2-120047133. [29] KSCHISCHANG F R. The Hilbert transform[J]. University of Toronto, 2006, 83: 277.KSCHISCHANG F R. The Hilbert transform[J]. University of Toronto, 2006, 83: 277. [30] DING Chunyu, LI Jing, and HU Rong. Moon-based ground-penetrating radar observation of the latest volcanic activity at the Chang’E-4 landing site[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 4600410. doi: 10.1109/TGRS.2023.3277992. [31] NEUVO Y, DONG Chengyu, and MITRA S. Interpolated finite impulse response filters[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1984, 32(3): 563–570. doi: 10.1109/TASSP.1984.1164348. [32] HUBER E and HANS G. RGPR—an open-source package to process and visualize GPR data[C]. The 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 2018: 1–4. doi: 10.1109/ICGPR.2018.8441658. [33] BAIKOVITZ A, SODHI P, DILLE M, et al. Ground encoding: Learned factor graph-based models for localizing ground penetrating radar[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 2021: 5476–5483. doi: 10.1109/IROS51168.2021.9636764. [34] QIU Xiaohang, DING Chunyu, JIN Tian, et al. Quantitative analysis of subsurface dielectric properties by Chang’E-4 lunar penetrating radar over lunar days 24–31[J]. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: 4600313. doi: 10.1109/TGRS.2025.3547897. [35] FU Xiaohui, QIAO Le, ZHANG Jiang, et al. The subsurface structure and stratigraphy of the Chang’E-4 landing site: Orbital evidence from small craters on the Von Kármán crater floor[J]. Research in Astronomy and Astrophysics, 2020, 20(1): 008. doi: 10.1088/1674-4527/20/1/8. [36] SHI Ke, YUE Zongyu, DI Kaichang, et al. The gardening process of lunar regolith by small impact craters: A case study in Chang’E-4 landing area[J]. Icarus, 2022, 377: 114908. doi: 10.1016/j.icarus.2022.114908. [37] LAI Jialong, CUI Feifei, XU Yi, et al. Dielectric properties of lunar materials at the Chang’E-4 landing site[J]. Remote Sensing, 2021, 13(20): 4056. doi: 10.3390/rs13204056. [38] ZHANG Jinhai, ZHOU Bin, LIN Yangting, et al. Lunar regolith and substructure at Chang’E-4 landing site in South Pole-Aitken basin[J]. Nature Astronomy, 2021, 5(1): 25–30. doi: 10.1038/s41550-020-1197-x. [39] XIAO Zhiyong, DING Chunyu, XIE Minggang, et al. Ejecta from the Orientale basin at the Chang’E-4 landing site[J]. Geophysical Research Letters, 2021, 48(3): e2020GL090935. doi: 10.1029/2020GL090935. -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

