
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Data Acquisition for Detecting Low-observable Targets at Sea by Using the Holographic Staring Radar
-
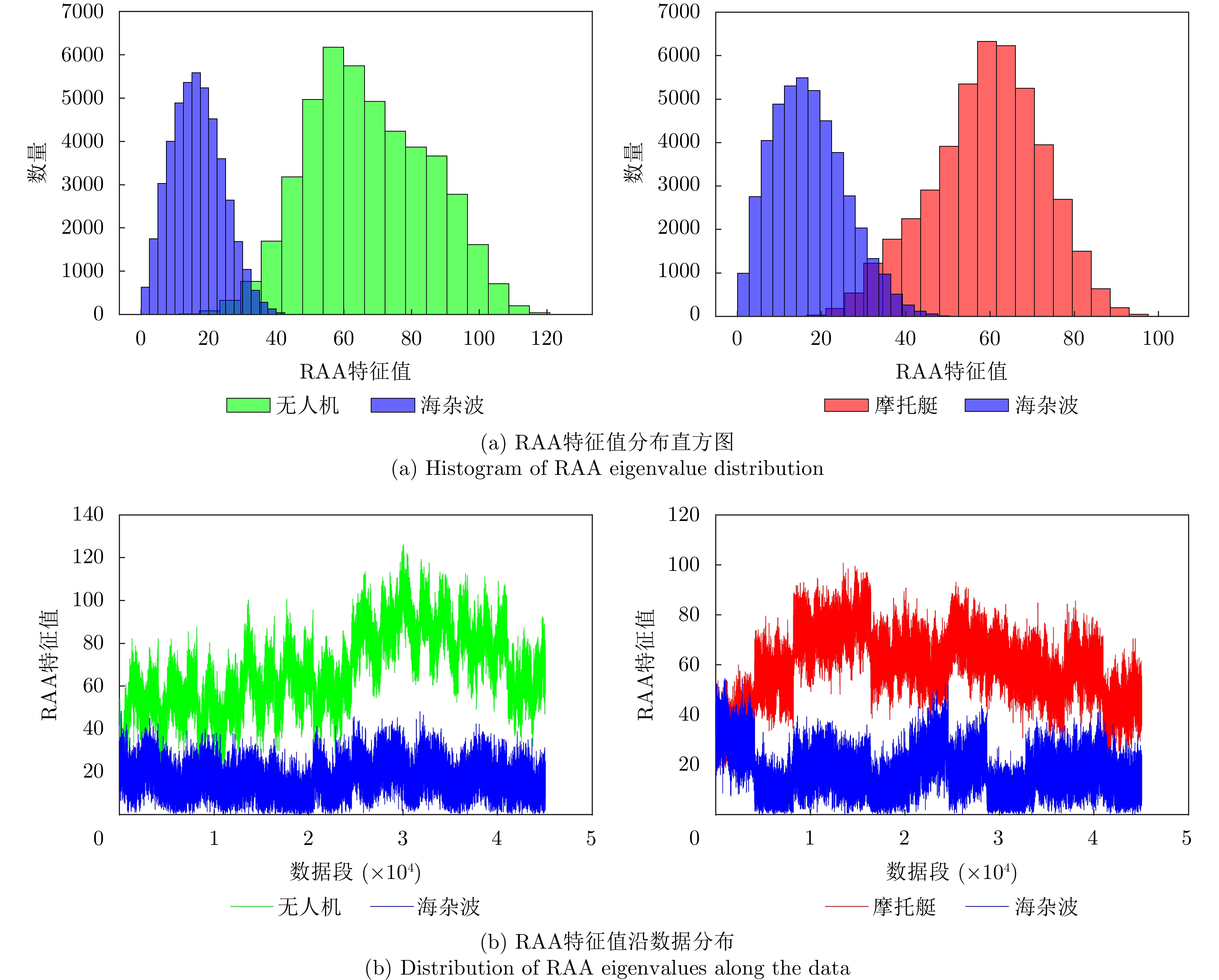
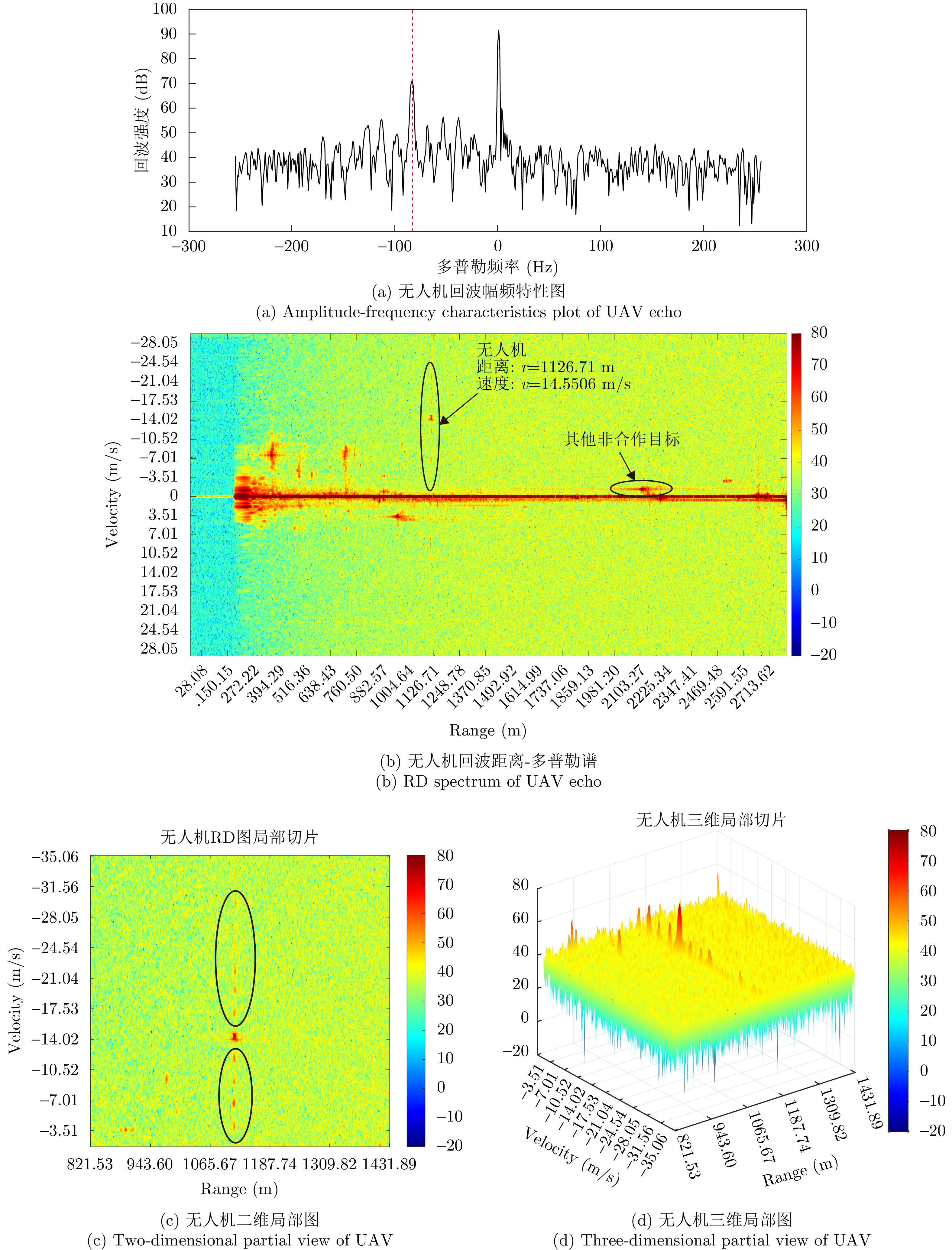
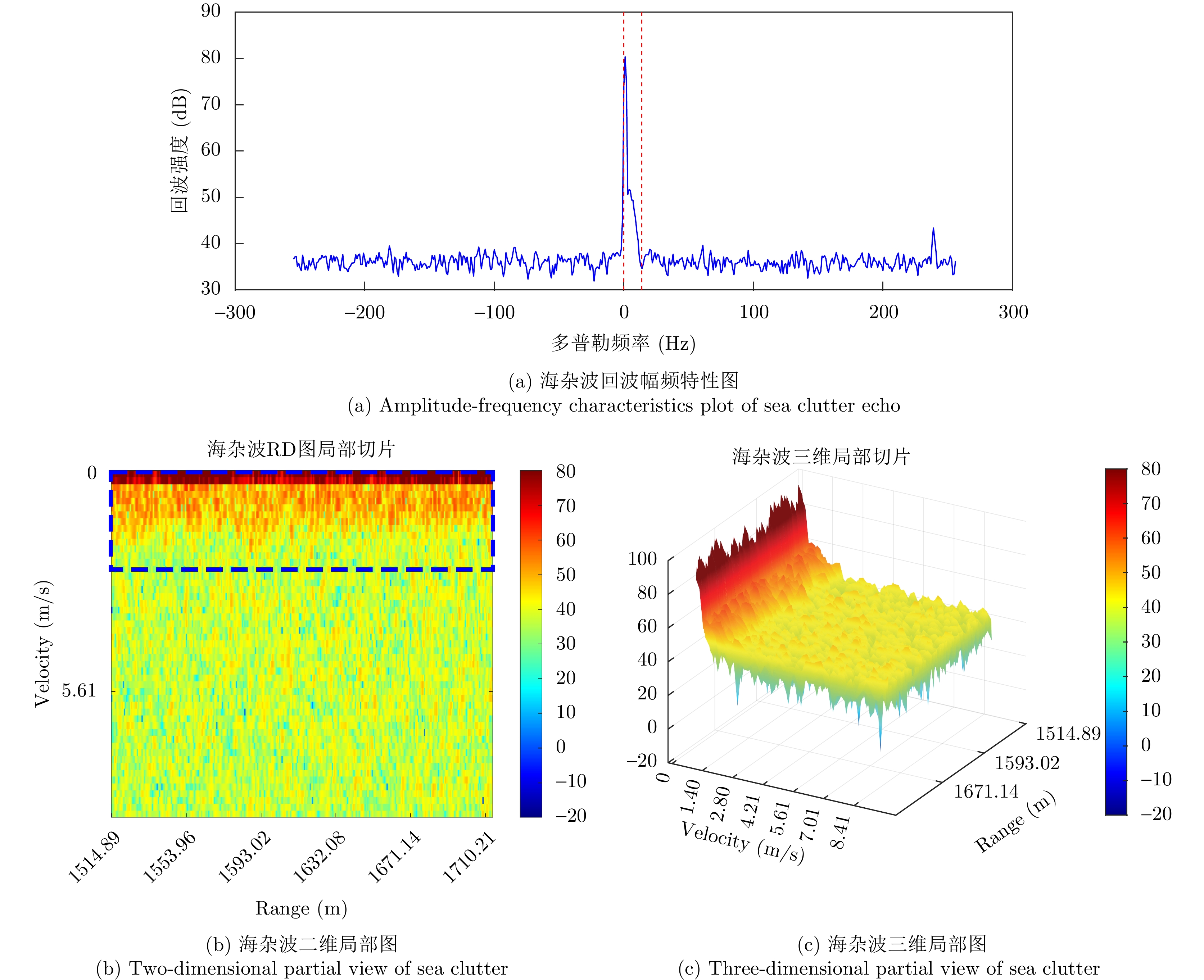
摘要: 海杂波背景下目标检测在很多方面均发挥着至关重要的作用,但复杂海洋环境中海杂波存在类目标尖峰与宽谱特性,导致海用雷达面临检测低慢小目标虚警率增高的严峻挑战。该文利用S波段高多普勒和高距离分辨体制(“双高”体制)全息凝视雷达开展对海探测试验,获取海面、海空低慢小目标与海杂波数据,并附有目标位置与轨迹真值以及风、浪相关数据,构建S波段全息凝视雷达海上低可观测目标数据集,并分析其时域特性、频域特性与时间-多普勒特性,分析结果为数据使用提供参考。后续将持续开展试验,拓展海洋试验环境(如海况、区域)及目标类型,以提升数据的多样性,为支撑海上低可观测目标新体制雷达系统能力提升与海上目标检测识别性能提升提供开放数据集。Abstract: Detecting targets despite sea clutter is crucial in military and civilian applications. In complex marine environments, sea clutter exhibits target-like spikes and inherently broad-spectrum characteristics, posing a significant challenge for marine radars in detecting Low-Slow-Small (LSS) targets and leading to high false alarm rates. In this study, an S-band holographic staring radar with high-Doppler and high-range-resolution capabilities (i.e., “dual-high” capability) was utilized in sea detection experiments. We obtained sea clutter data, LSS target data (over the sea surface and in the air), ground truth data on target positions and trajectories, as well as wind and wave data. Using these data, we constructed an S-band holographic staring radar dataset for low-observable targets at sea. The time-domain, frequency-domain, and time-Doppler characteristics of the dataset were analyzed, and the results served as a reference for data utilization. Future work will involve continuing experiments to expand the maritime experimental environment (e.g., sea state and region) and target types toward enhancing data diversity. This open dataset will support the enhancement of new radar systems for detecting low-observable targets at sea and improving maritime target detection and recognition performance.
-
Key words:
- Holographic staring radar /
- Sea detection /
- Target detection /
- Sea clutter /
- Dataset
-

图 9 光电跟踪器记录摩托艇试验
Figure 9. Electro-optical tracker recording of the motorboat experiments
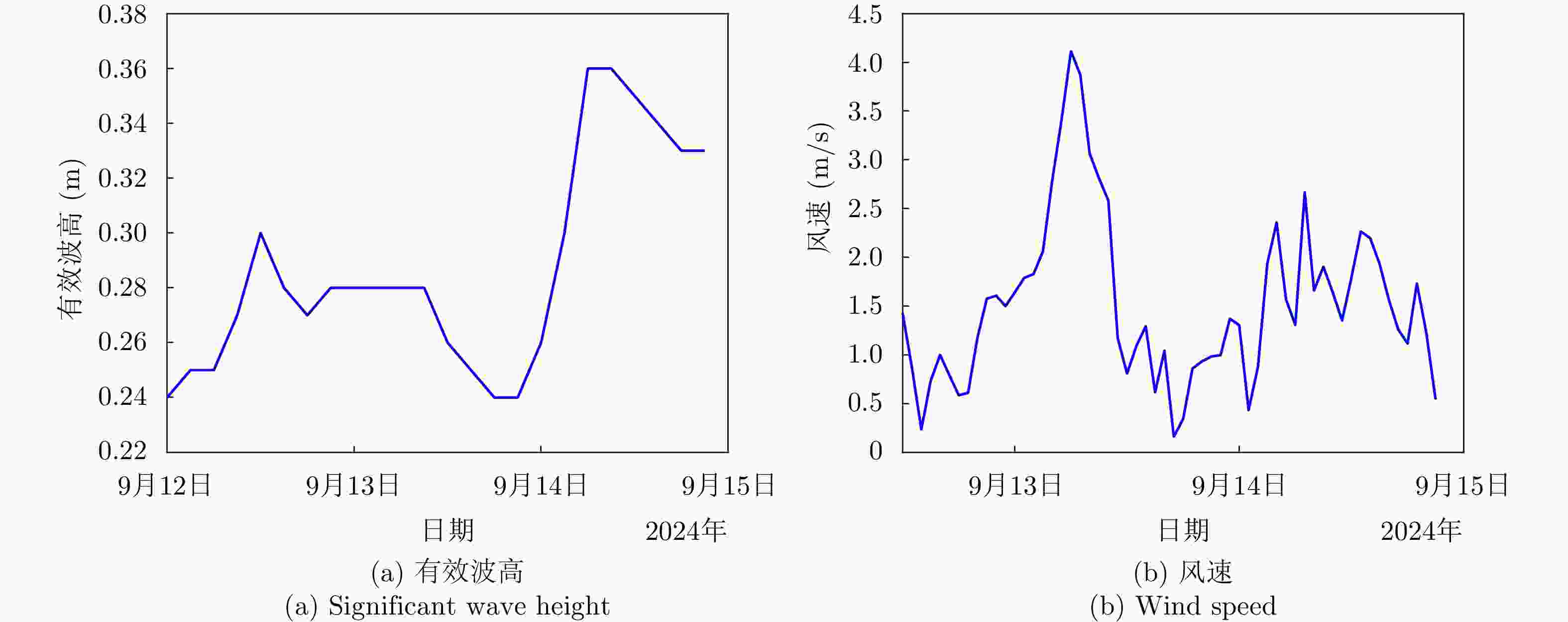
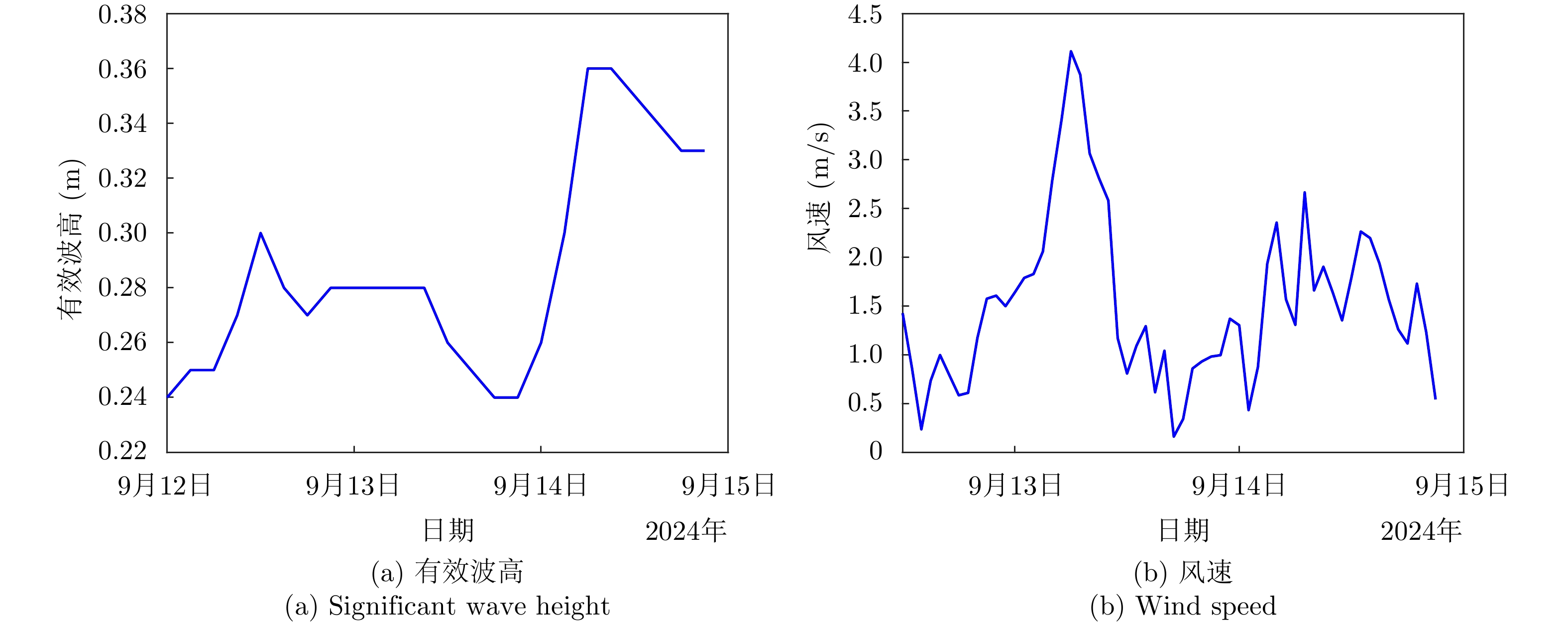
图 13 试验海域气象水文数据(NC数据)
Figure 13. Meteorological and hydrographic data of the experimental sea area (NC data)

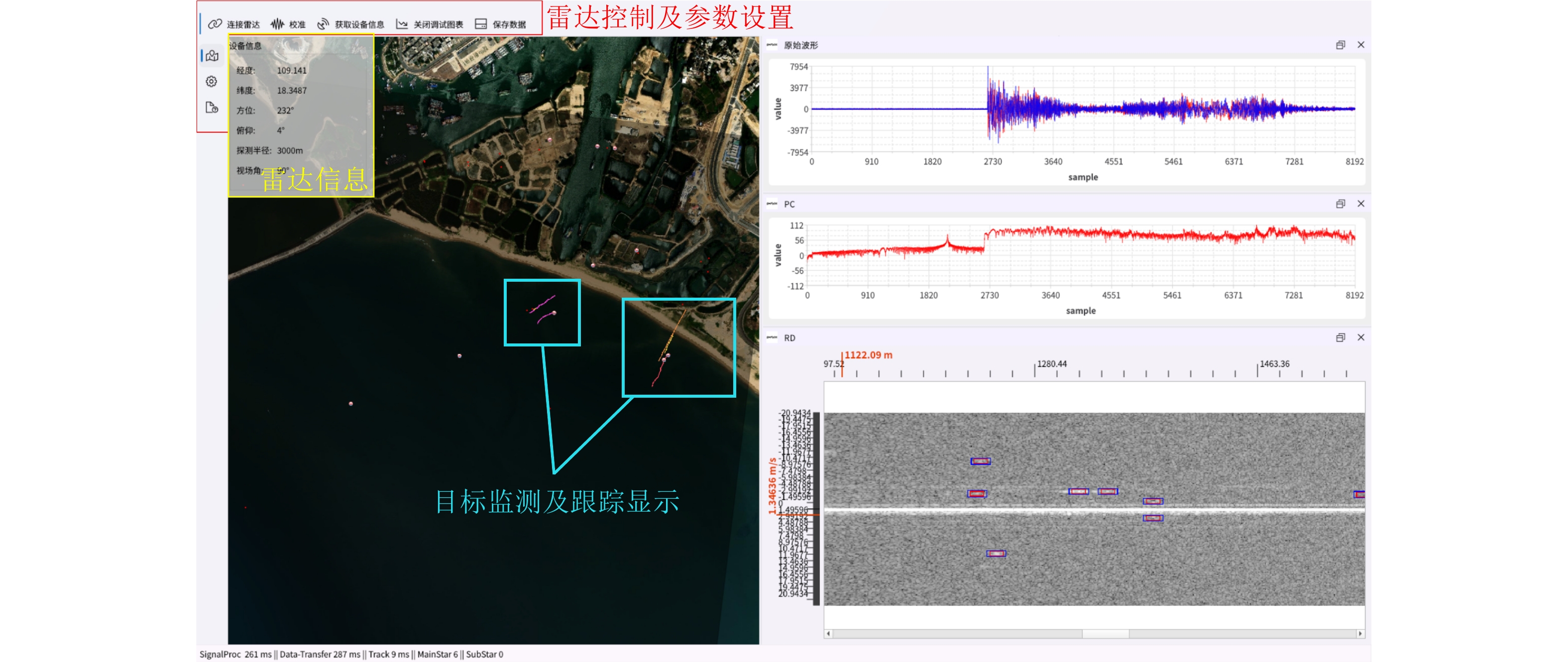
图 21 多体制海上低可观测目标数据集:全息凝视雷达海上低可观测目标数据集
Figure 21. Multi-system maritime low observable target dataset: The holographic staring radar maritime low observable target dataset
表 1 S波段全息凝视雷达参数
Table 1. Parameters of S-band holographic staring radar
参数 指标 体制 脉冲多普勒全数字全相参凝视雷达 波束扫描方式 方位俯仰全数字 工作频段 S 工作频率 2.8~3.2 GHz 典型波形 LFM, 0.25~8.00 μs 带宽 100 MHz 探测距离 ≥3 km 覆盖范围 60°×15° (方位角×俯仰角) 距离分辨率 1.5 m 多普勒分辨率 最小可达0.044 m/s 测速范围 0.5~60.0 m/s 测量精度
SNR≥20 dB测距≤1.5 m (R.M.S)
速度误差≤1.5 m/s (R.M.S)
方位≤2° (R.M.S)
俯仰≤1.5° (R.M.S)同时探测的目标数量 ≥200 批  下载: 导出CSV
下载: 导出CSV
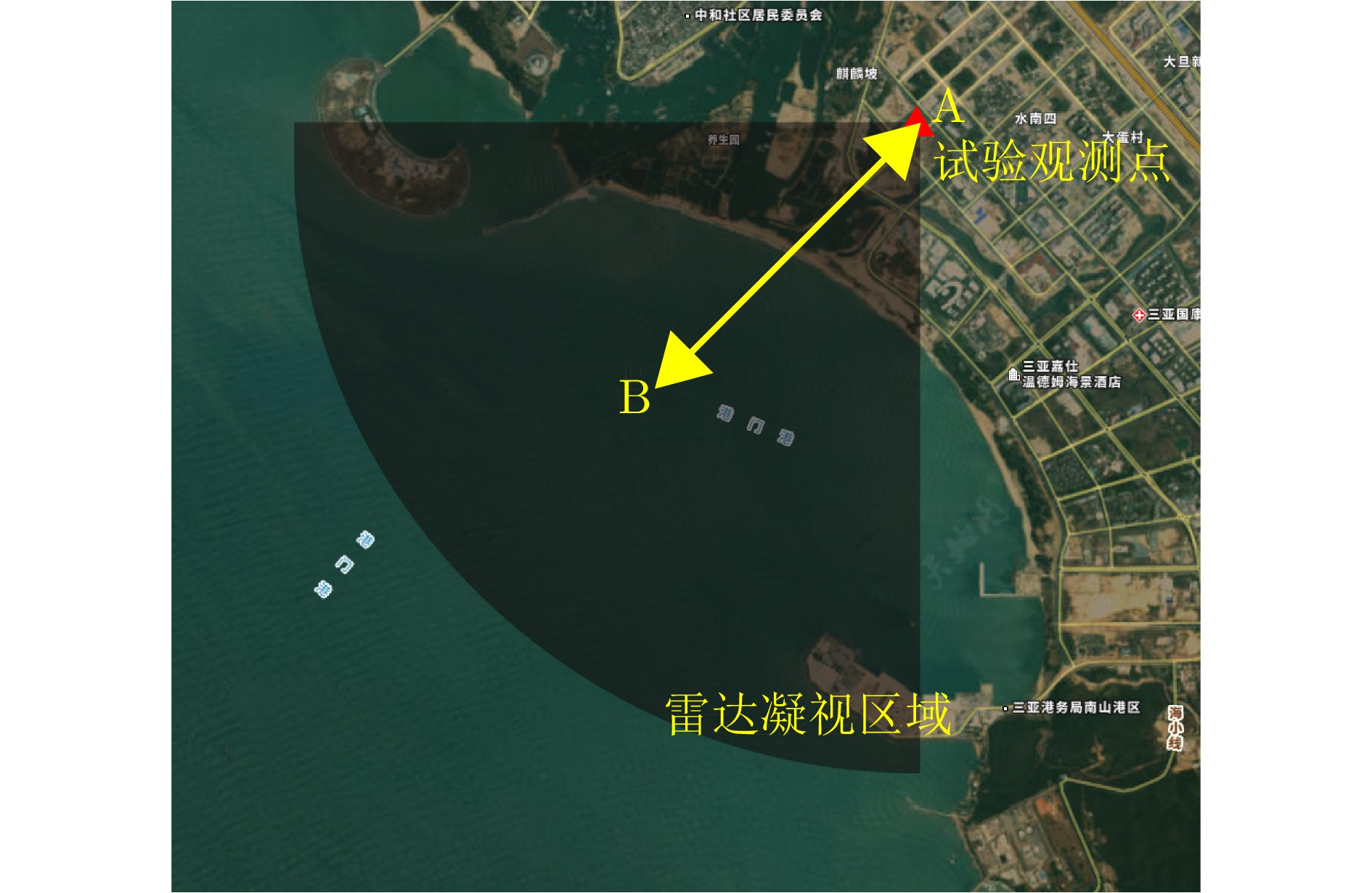
表 2 试验站点详细信息
Table 2. Pilot site details
平台信息 详细内容 几何信息 试验场地距离海边直线距离约800 m;
海拔范围为30 m;
雷达对外海视野范围约150°;
明显地海杂波数据的擦地角范围为0.6°~2.1°。典型目标支撑 中大型商船;
大量木制小型渔船和金属蒙皮中大型渔船;
小型游艇、摩托艇、小型帆船;
可下水小型无人船;
浮标;
可放飞多型固定翼与旋翼无人机。应用场景支撑 面向海杂波特性研究场景;
面向海陆复合杂波特性研究场景;
舰载雷达防空预警场景;
海面和航道监视场景;
岛屿岛礁防护场景;
海面搜救场景。
下载: 导出CSV
表 3 雷达回波数据列表
Table 3. Radar echo data list
目标类型 运动速度 数据组数 序号 采集时间 目标真值 海况等级 海空低可观测目标 3 m/s 1 01 2024-09-14-17-34-22-553 (往)
2024-09-14-17-36-42-918 (返)有 2级 6 m/s 1 02 2024-09-14-17-39-08-101 有 2级 9 m/s 1 03 2024-09-14-17-41-33-637 有 2级 12 m/s 1 04 2024-09-14-17-51-25-745 有 2级 15 m/s 3 05 2024-09-14-17-53-56-224 有 3级 06 2024-08-08-17-32-03-396 有 3级 07 2024-08-09-14-58-50-445 有 2级 海面低可观测目标 / 2 01 2024-09-12-16-38-46-177 无 3级 02 2024-09-13-15-45-10-070 无 3级
下载: 导出CSV
表 4 不同目标示例数据
Table 4. Sample data for multiple targets
名称 数据 脉冲积累 浪高(m) 浪向(°) 风速(m/s) 海况 真值 无人机 2024-09-14-17-34-22 (往)
2024-09-14-17-534096 0.33 156.02 1.12 二级 有 摩托艇 2024-09-12-16-38 4096 0.27 157.93 0.99 二级 无 海杂波 2024-09-12-16-38 4096 0.27 157.93 0.99 二级 有
下载: 导出CSV
-
[1] SKOLNIK M I. Radar Handbook[M]. 3rd ed. New York: The McGraw-Hill Companies Inc., 2008. [2] WARD K D and WATTS S. Use of sea clutter models in radar design and development[J]. IET Radar, Sonar & Navigation, 2010, 4(2): 146–157. doi: 10.1049/iet-rsn.2009.0132. [3] 陈小龙, 关键, 黄勇, 等. 雷达低可观测目标探测技术[J]. 科技导报, 2017, 35(11): 30–38. doi: 10.3981/j.issn.1000-7857.2017.11.004.CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radar low-observable target detection[J]. Science & Technology Review, 2017, 35(11): 30–38. doi: 10.3981/j.issn.1000-7857.2017.11.004. [4] GRECO M, STINCO P, and GINI F. Identification and analysis of sea radar clutter spikes[J]. IET Radar, Sonar & Navigation, 2010, 4(2): 239–250. doi: 10.1049/iet-rsn.2009.0088. [5] MELIEF H W, GREIDANUS H, VAN GENDEREN P, et al. Analysis of sea spikes in radar sea clutter data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(4): 985–993. doi: 10.1109/TGRS.2005.862497. [6] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089.LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089. [7] 赵永波, 刘宏伟. MIMO雷达技术综述[J]. 数据采集与处理, 2018, 33(3): 389–399. doi: 10.16337/j.1004-9037.2018.03.001.ZHAO Yongbo and LIU Hongwei. Overview on MIMO radar[J]. Journal of Data Acquisition and Processing, 2018, 33(3): 389–399. doi: 10.16337/j.1004-9037.2018.03.001. [8] 陈小龙, 黄勇, 关键, 等. MIMO雷达微弱目标长时积累技术综述[J]. 信号处理, 2020, 36(12): 1947–1964. doi: 10.16798/j.issn.1003-0530.2020.12.001.CHEN Xiaolong, HUANG Yong, GUAN Jian, et al. Review of long-time integration techniques for weak targets using MIMO radar[J]. Journal of Signal Processing, 2020, 36(12): 1947–1964. doi: 10.16798/j.issn.1003-0530.2020.12.001. [9] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084.XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084. [10] Copernicus Marine Service (CMEMS). Global ocean hourly sea surface wind and stress from scatterometer and model product[EB/OL]. https://data.marine.copernicus.eu/product/WIND_GLO_PHY_L4_NRT_012_004/services. doi: https://doi.org/10.48670/moi-00305. [11] Copernicus Marine Service (CMEMS). Global ocean waves reanalysis product[EB/OL]. https://data.marine.copernicus.eu/product/GLOBAL_MULTIYEAR_WAV_001_032/descript ion. doi: https://doi.org/10.48670/moi-00022. [12] WU Xijie, DING Hao, LIU Ningbo, et al. Priori information-based feature extraction method for small target detection in sea clutter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5115315. doi: 10.1109/TGRS.2022.3188046. [13] 丁昊, 朱晨光, 刘宁波, 等. 高海况条件下海面漂浮小目标特征提取与分析[J]. 海军航空大学学报, 2023, 38(4): 301–312. doi: 10.7682/j.issn.2097-1427.2023.04.001.DING Hao, ZHU Chenguang, LIU Ningbo, et al. Feature extraction and analysis of small floating targets in high sea conditions[J]. Journal of Naval Aviation University, 2023, 38(4): 301–312. doi: 10.7682/j.issn.2097-1427.2023.04.001. [14] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657. [15] 刘添豪, 尧泽昆, 陈曦, 等. 一种空基雷达高速微弱机动目标信号相参积累方法[J]. 电讯技术, 2023, 63(9): 1361–1367. doi: 10.20079/j.issn.1001-893x.220504002.LIU Tianhao, YAO Zekun, CHEN Xi, et al. A coherent integration method for signals of high-speed weak maneuvering target of air-borne radar[J]. Telecommunication Engineering, 2023, 63(9): 1361–1367. doi: 10.20079/j.issn.1001-893x.220504002. [16] ZHANG Shunsheng, ZHANG Wei, and WANG Yang. Multiple targets’ detection in terms of Keystone transform at the low SNR level[C]. 2008 International Conference on Information and Automation, Changsha, China, 2008: 1–4. doi: 10.1109/ICINFA.2008.4607957. [17] 李芳芳. 海浪浪花与船行波建模绘制技术研究与实现[D]. [硕士论文], 国防科学技术大学, 2014.LI Fangfang. Wave foam and ship waves modeling and rendering technology research and achievement[D]. [Master dissertation], National University of Defense Technology, 2014. [18] SORENSEN R M. Basic Wave Mechanics: For Coastal and Ocean Engineers[M]. New York: Wiley, 1993. [19] PLANT W J, KELLER W C, HESANY V, et al. Bound waves and Bragg scattering in a wind-wave tank[J]. Journal of Geophysical Research: Oceans, 1999, 104(C2): 3243–3263. doi: 10.1029/1998JC900061. [20] PLANT W J and FARQUHARSON G. Wave shadowing and modulation of microwave backscatter from the ocean[J]. Journal of Geophysical Research: Oceans, 2012, 117(C8): C08010. [21] 张龙刚. S波段多普勒雷达海浪提取关键技术研究[D]. [博士论文], 武汉大学, 2016.ZHANG Longgang. Ocean wave extracting technology using S-band Doppler radar[D]. [Ph.D. dissertation], Wuhan University, 2016. -












计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

