
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Sea-detecting Radar Experiment and Target Feature Data Acquisition for Multisource Observation Dataset of Maritime Targets
-
摘要: 海上目标检测识别技术发展需要大量高质量的海上目标多传感器实测数据。针对这一需求,“雷达对海探测数据共享计划(SDRDSP)”升级为“海上目标数据共享计划(MTDSP)”,利用HH极化雷达、VV极化雷达、光电设备、AIS设备开展海上船只目标多源观测试验,获取雷达中频/视频回波切片数据、可见光与红外图像数据、AIS静态与动态报文数据、气象水文数据,覆盖典型海况和多种船型,构建涵盖多种类型海上目标的多源观测数据集,完成同一目标多种模态数据的匹配和标注,并实现目标数据的自动入库管理、条件检索和批量导出,为海上目标特性数据自动获取、长期积累与使用奠定基础。在此基础上,基于实测数据对比分析了不同海况、姿态、极化条件下同一船只目标的时域/频域特征、不同类型船只目标的时域/频域特征,形成了目标特征变化的统计结论。Abstract: Maritime target detection and identification technology are developed using large-scale, high-quality multi-sensor measurement data. Therefore, the Sea Detection Radar Data Sharing Program (SDRDSP) was upgraded to the Maritime Target Data Sharing Program (MTDSP), integrating multiple observation modalities, such as HH-polarized radar, VV-polarized radar, electro-optical devices, and Automatic Identification System (AIS) equipment to conduct multisource observation experiments on maritime vessel targets. The program collects various data types, including radar intermediate frequency/video echo slice data, visible and infrared imagery, AIS static and dynamic messages, and meteorological and hydrological data, covering representative sea conditions and multiple vessel types. A comprehensive multisource observation dataset was constructed, enabling the matching and annotation of multimodal data for the same target. Moreover, an automated data management system was implemented to support data storage, conditional retrieval, and batch export, providing a solid foundation for the automated acquisition, long-term accumulation, and efficient use of maritime target characteristic data. Based on this system and measured data, the time/frequency domain features of the same and different vessel targets under different sea states, attitudes, polarization conditions are compared and analyzed, and the statistical conclusion of the change in target features is obtained.
-
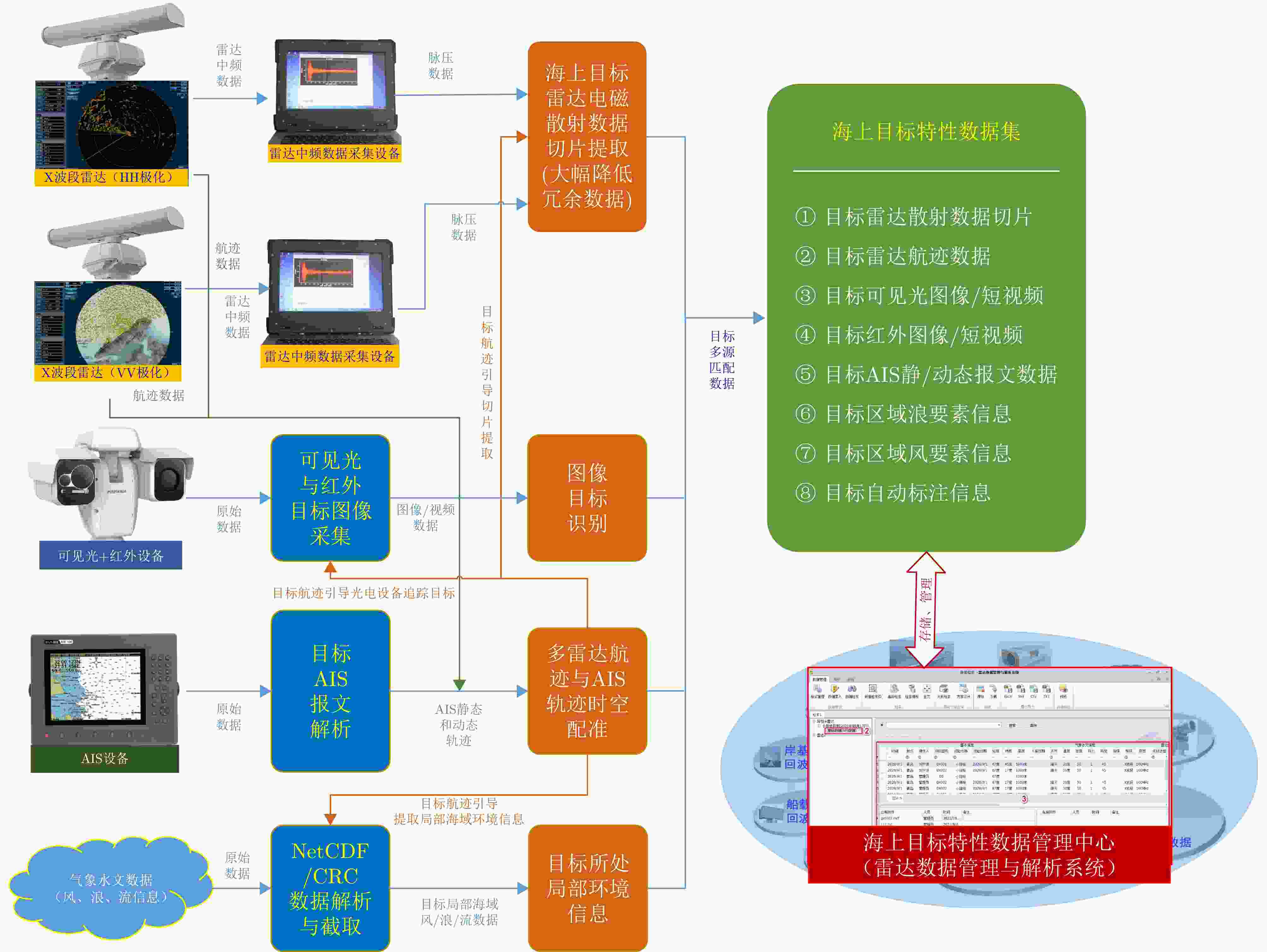
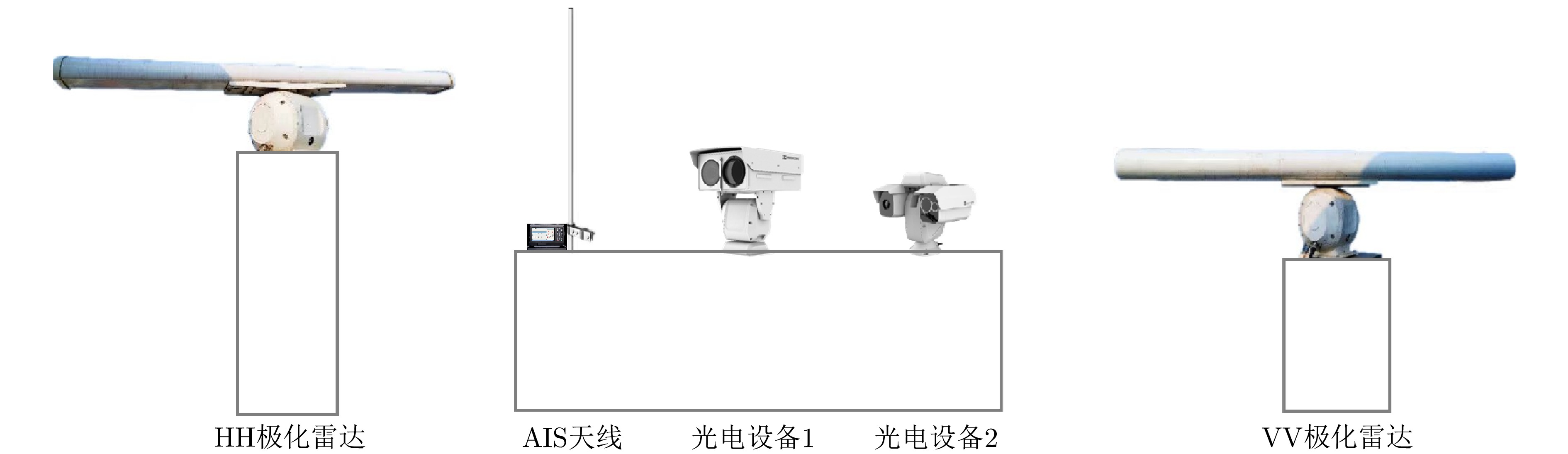
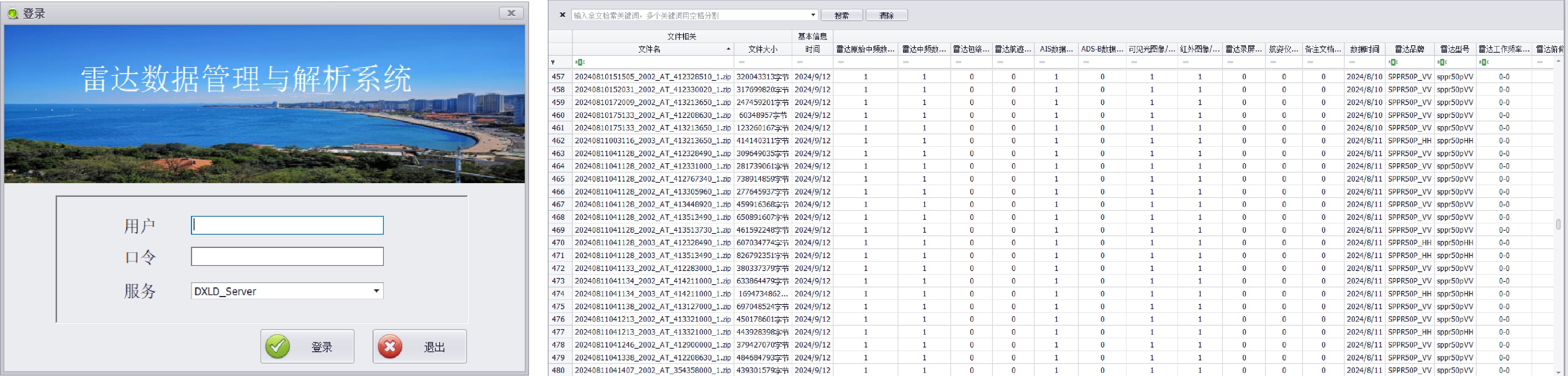
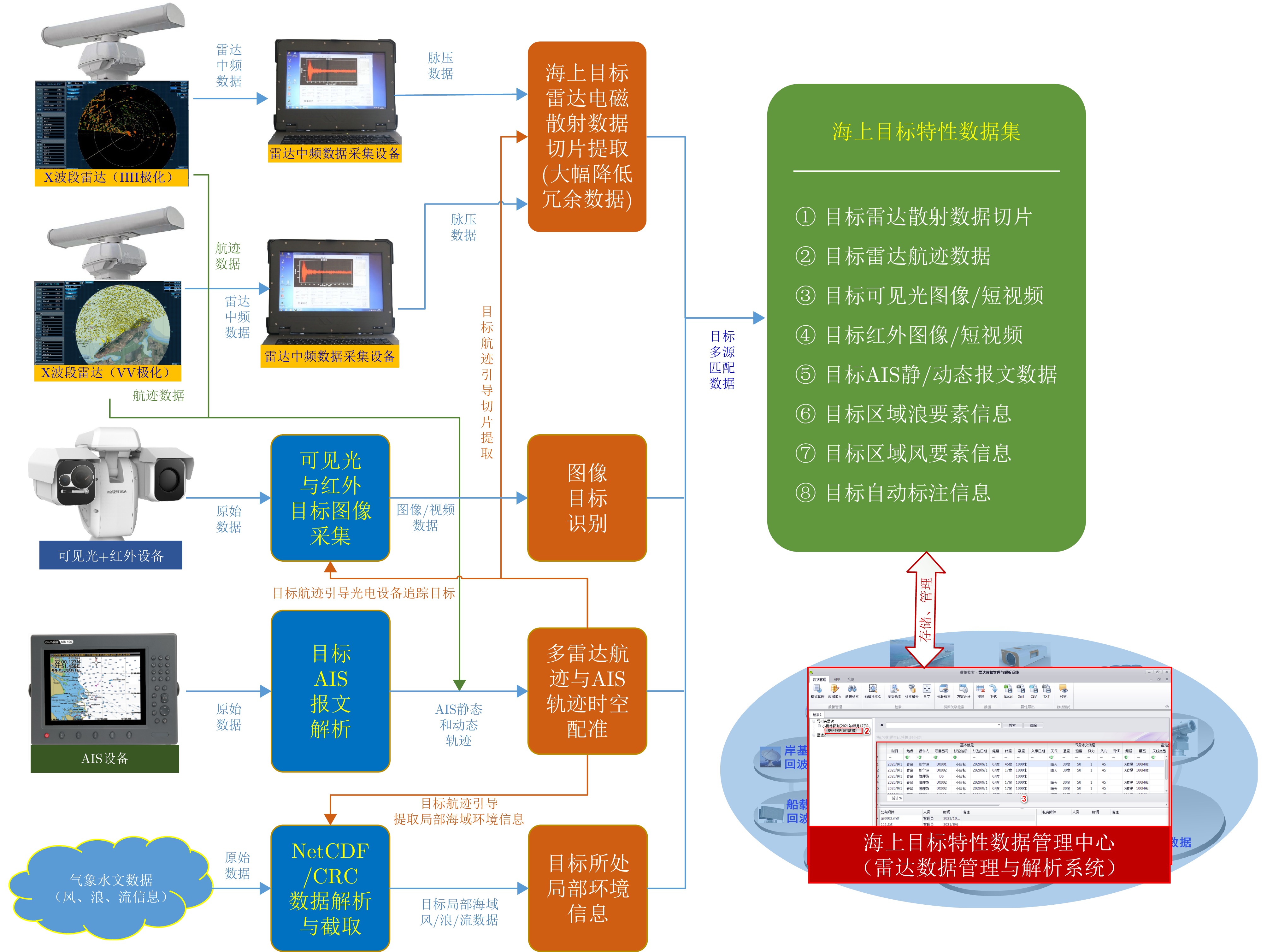
图 1 海上目标多源数据采集与标注系统
Figure 1. Maritime target multisource data acquisition and labeling system
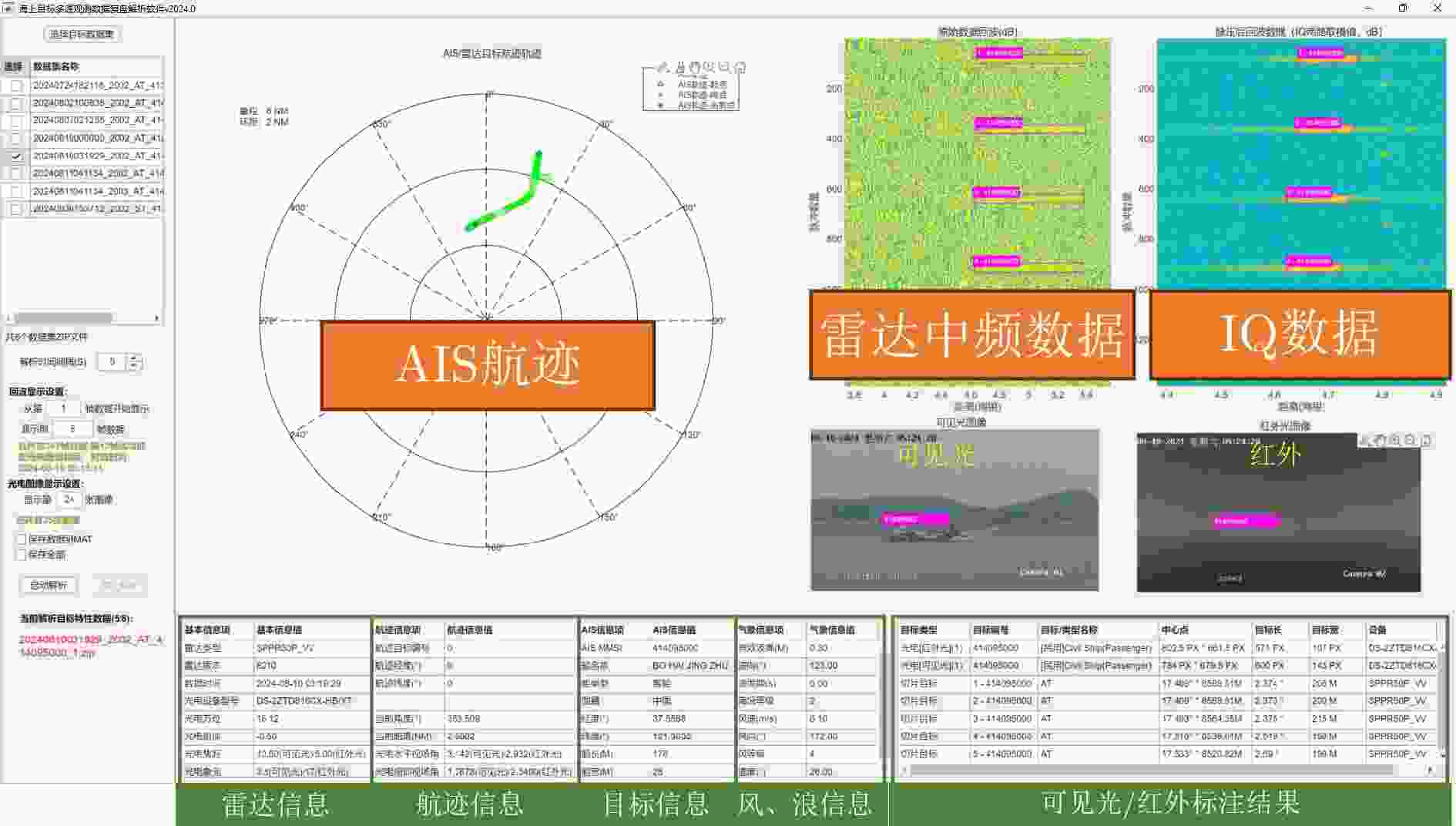
图 10
20240810031929 _2002_AT_414095000 _1数据复盘解析结果Figure 10.
20240810031929 _2002_AT_414095000 _1 data disk parsing result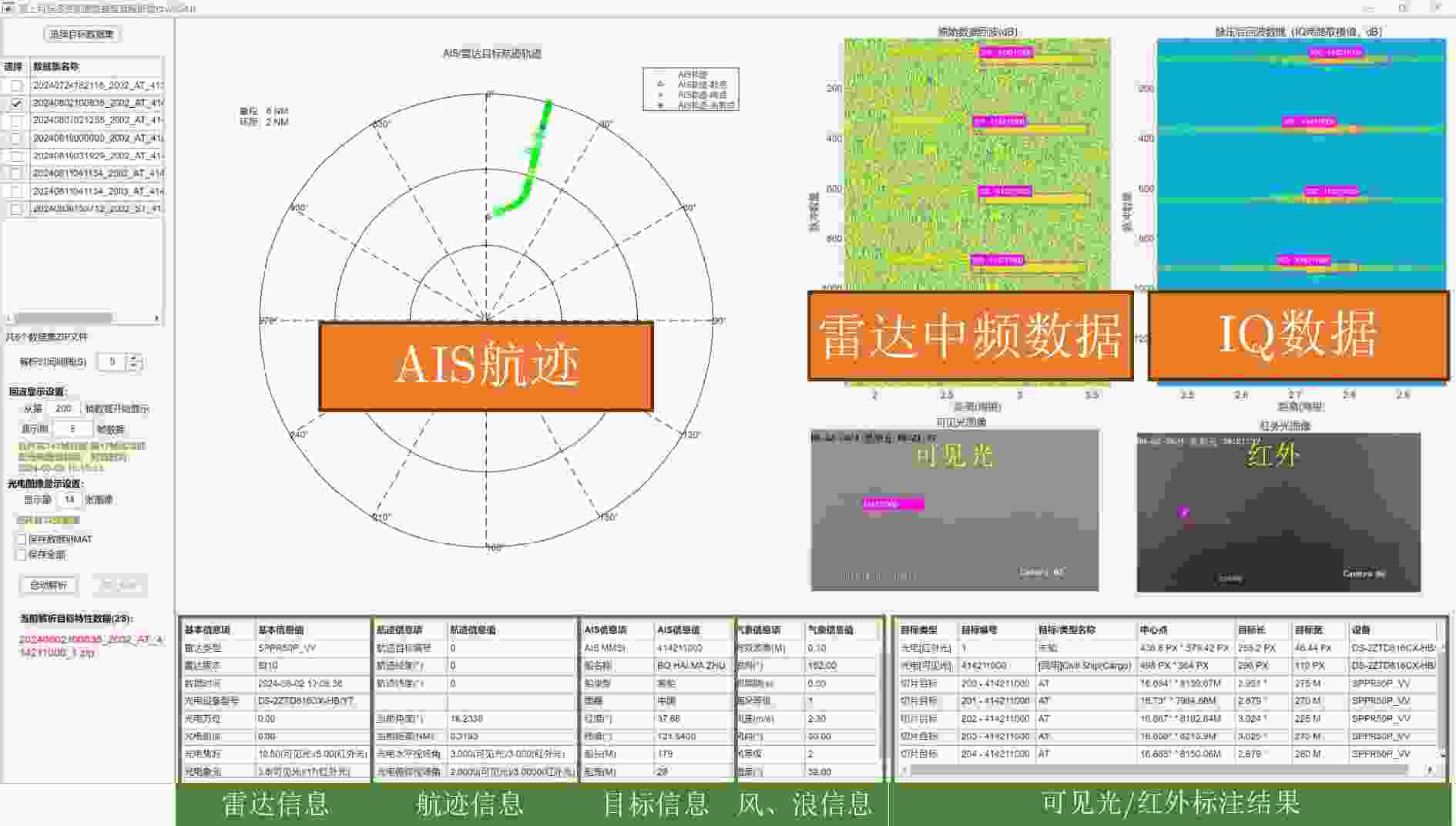
图 11
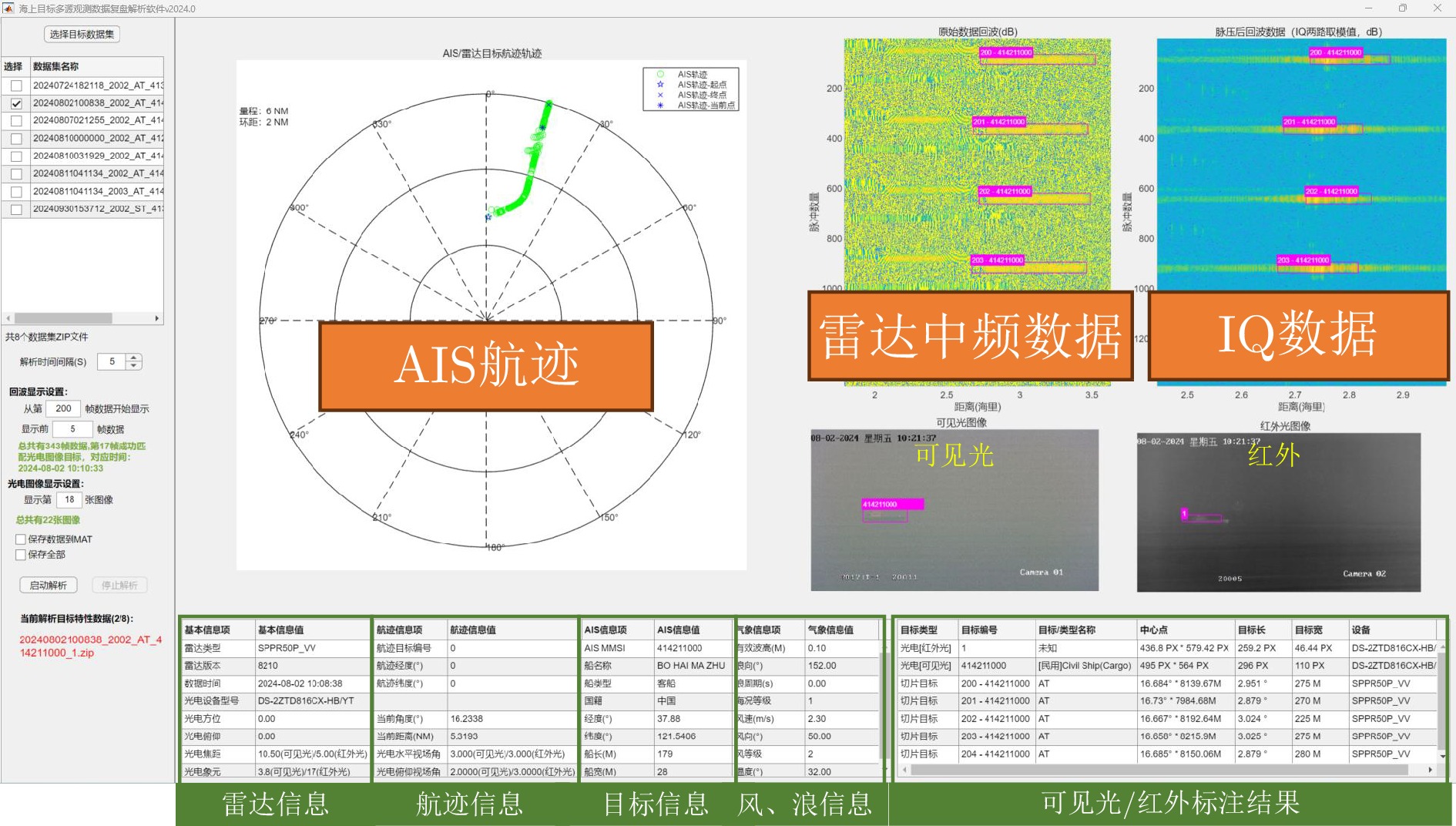
20240802100838 _2002_AT_414211000 _1数据复盘解析结果Figure 11.
20240802100838 _2002_AT_414211000 _1 data disk parsing result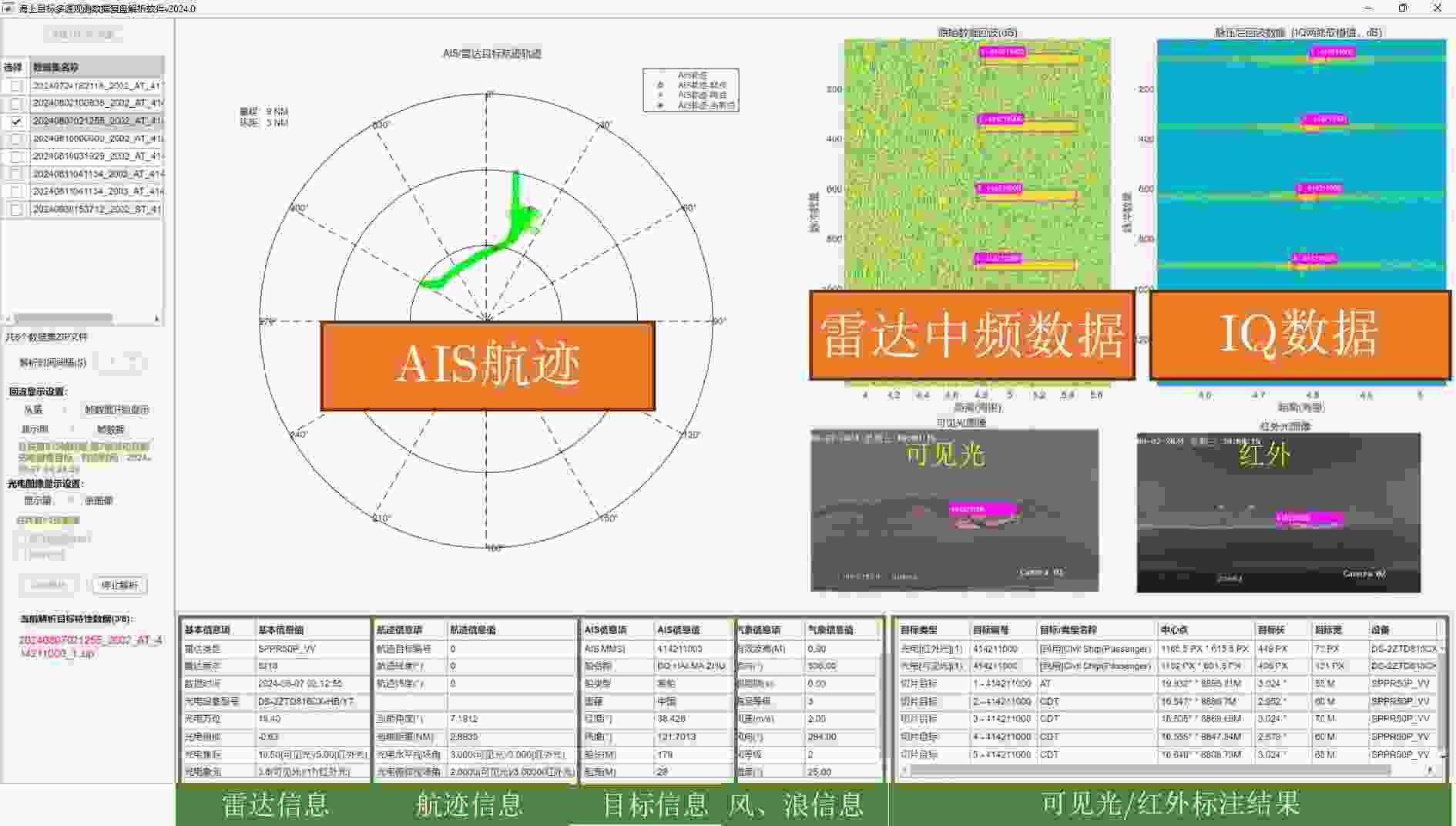
图 12
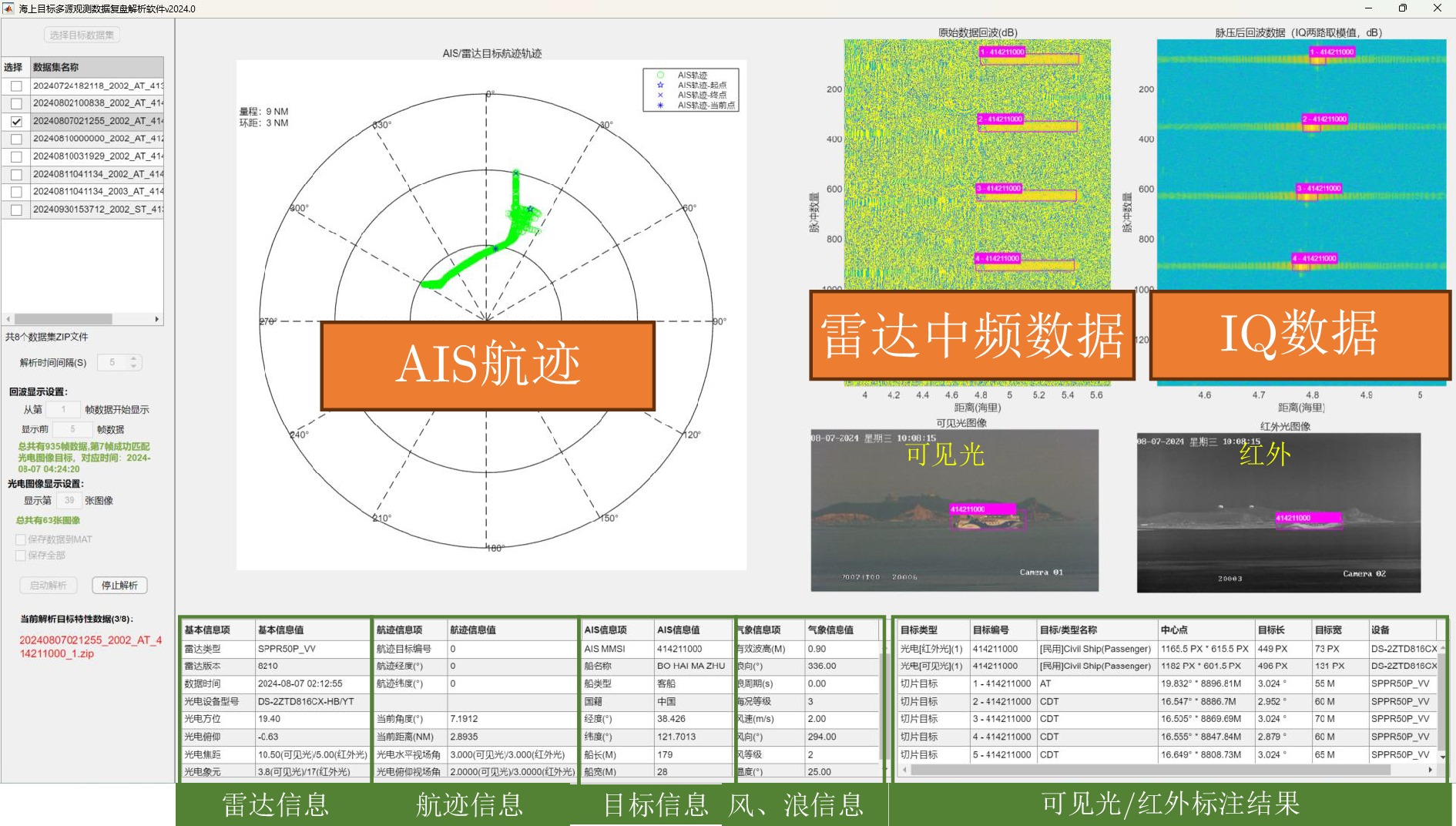
20240807021255 _2002_AT_414211000 _1数据复盘解析结果Figure 12.
20240807021255 _2002_AT_414211000 _1 data disk parsing result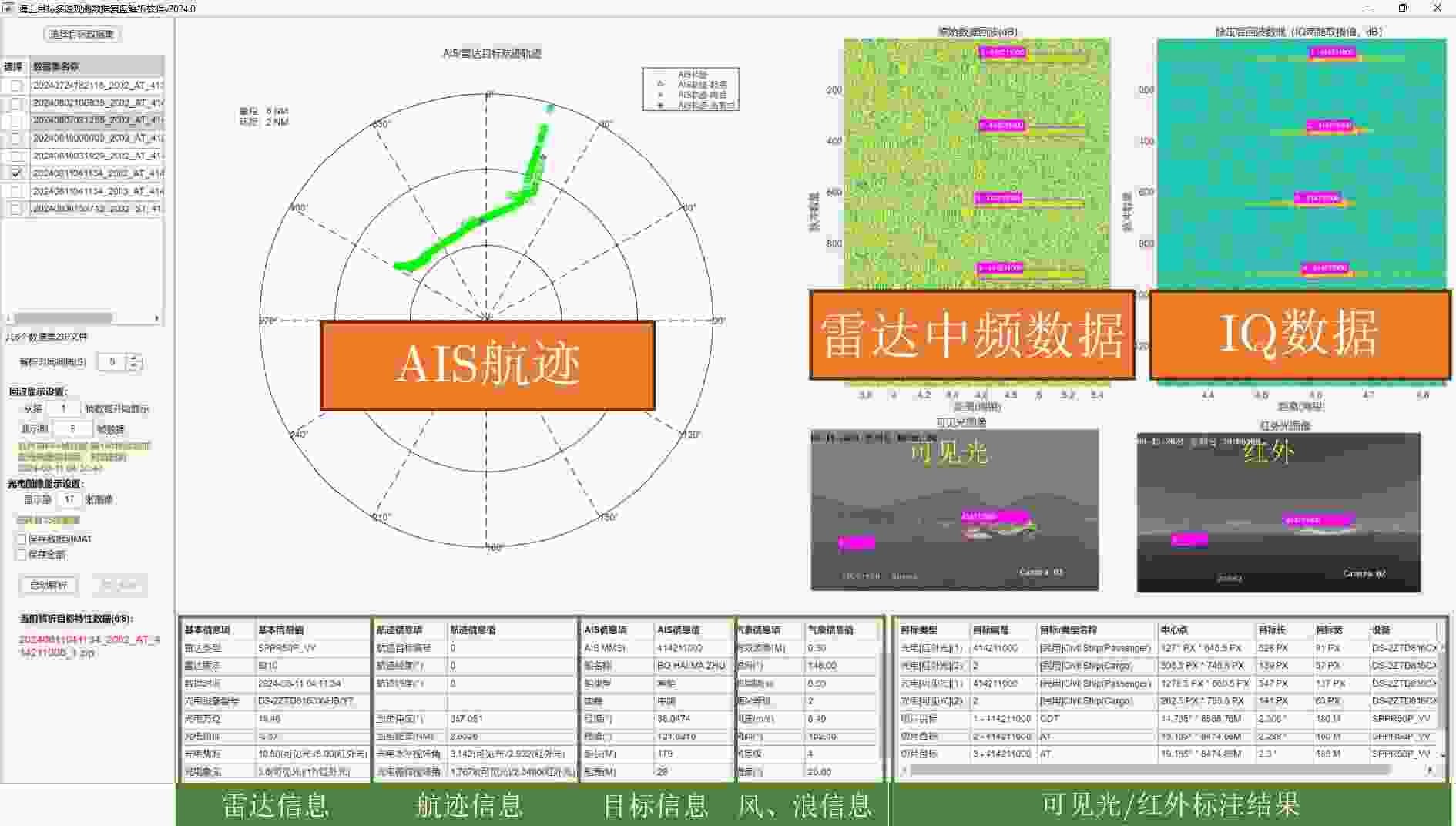
图 13
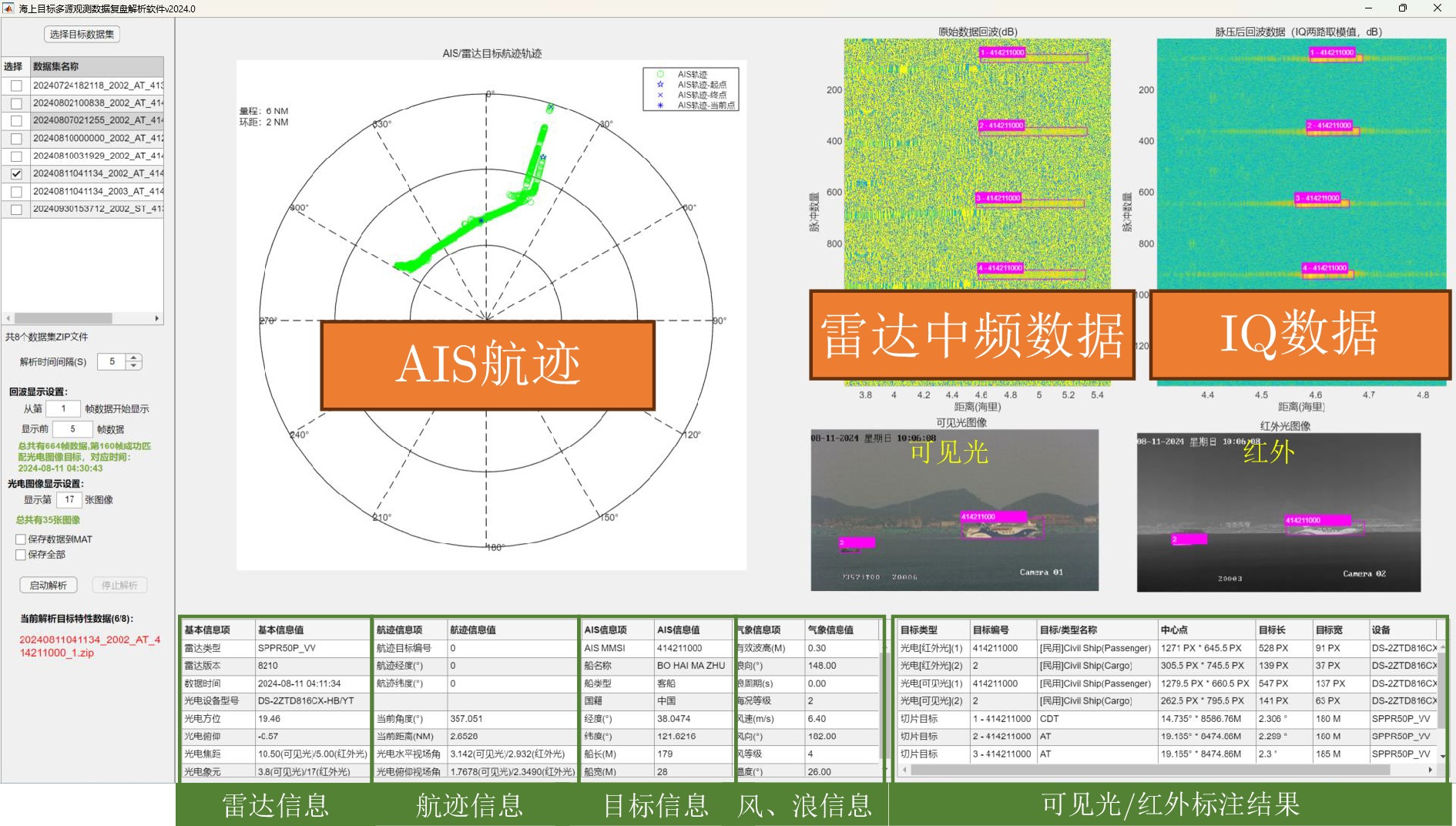
20240811041134 _2002_AT_414211000 _1数据复盘解析结果Figure 13.
20240811041134 _2002_AT_414211000 _1 data disk parsing result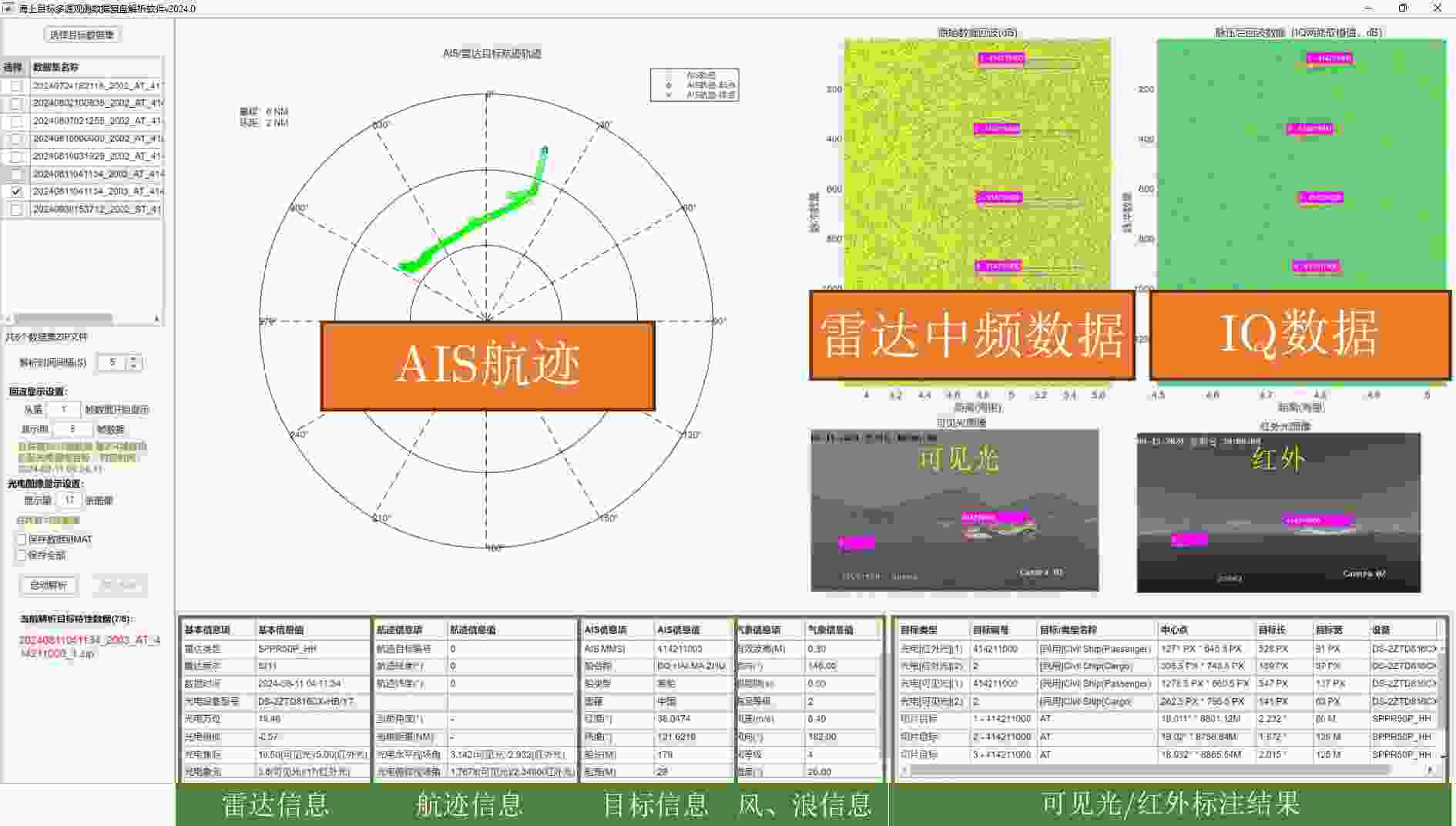
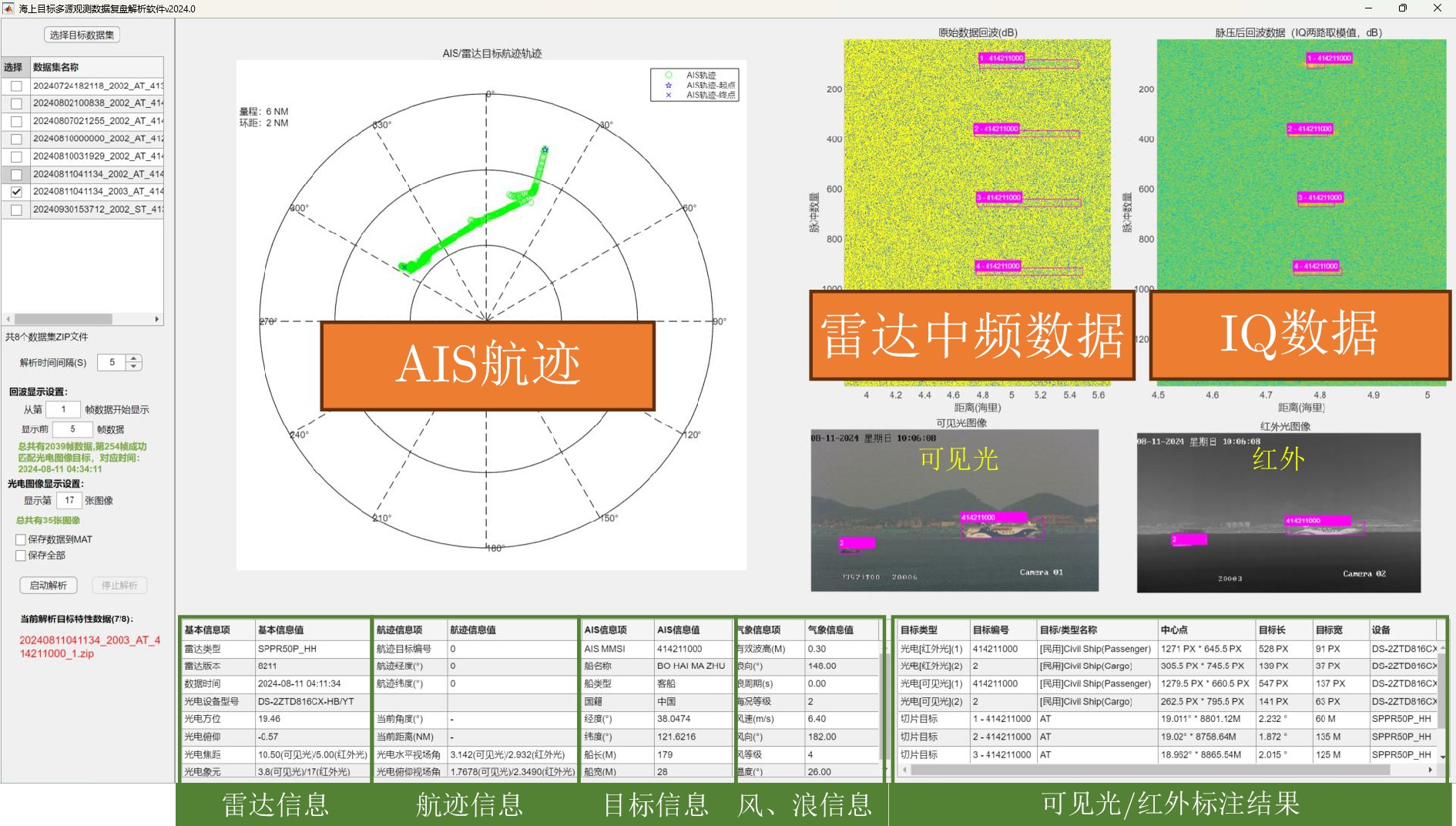
图 14
20240811041134 _2003_AT_414211000 _1数据复盘解析结果Figure 14.
20240811041134 _2003_AT_414211000 _1 data disk parsing result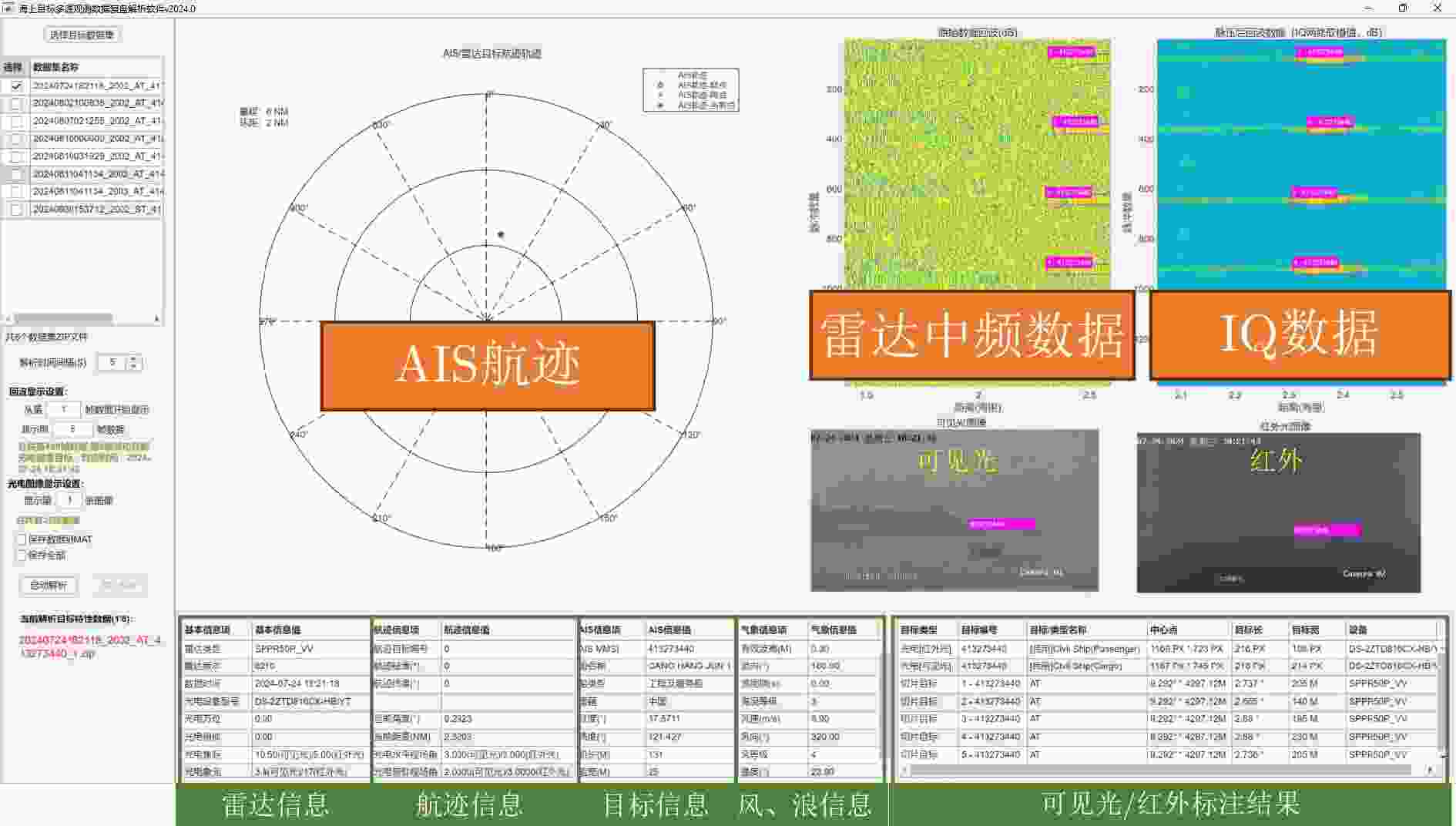
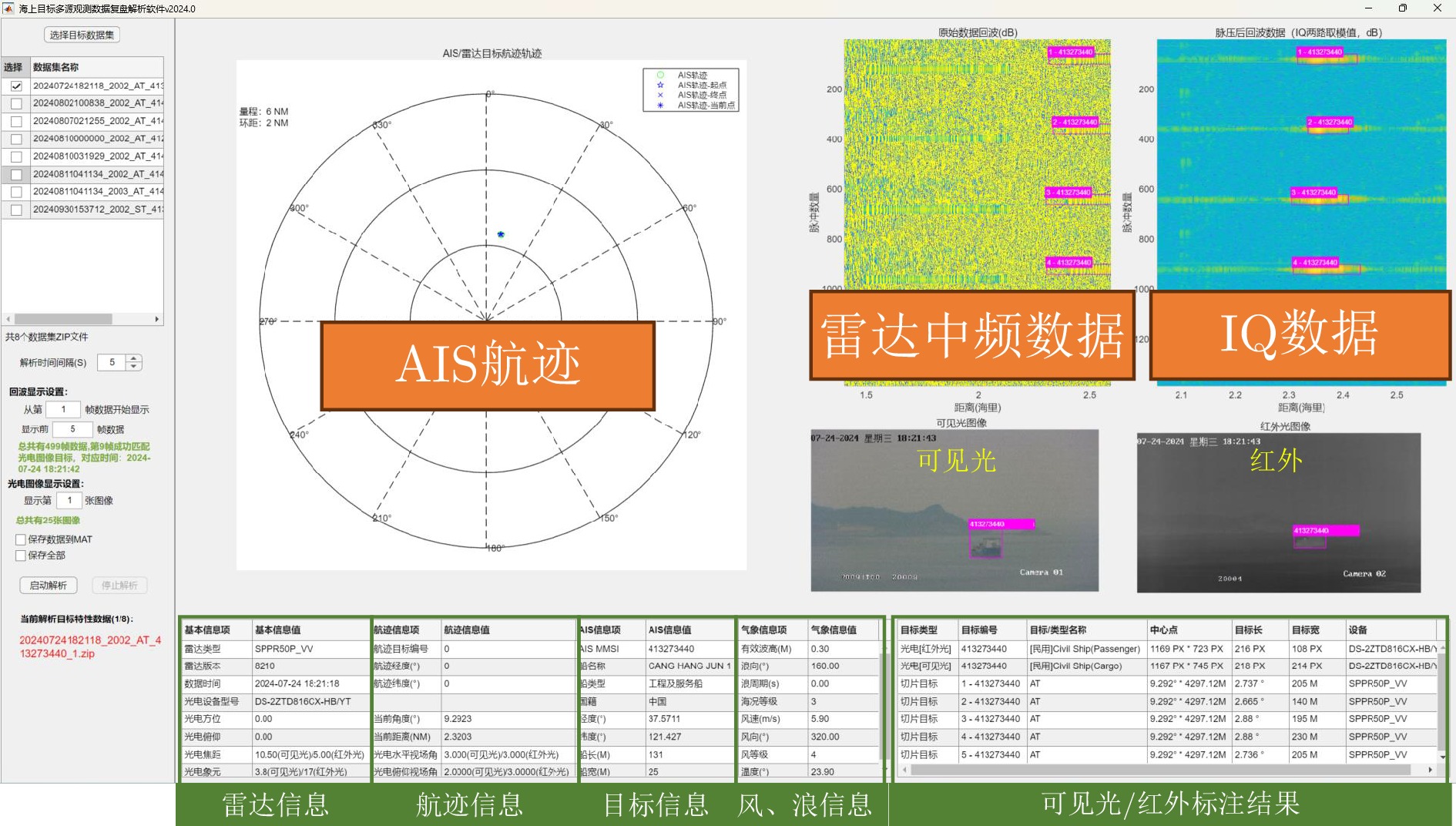
图 15
20240724182118 _2002_AT_413273440 _1数据复盘解析结果Figure 15.
20240724182118 _2002_AT_413273440 _1 data disk parsing result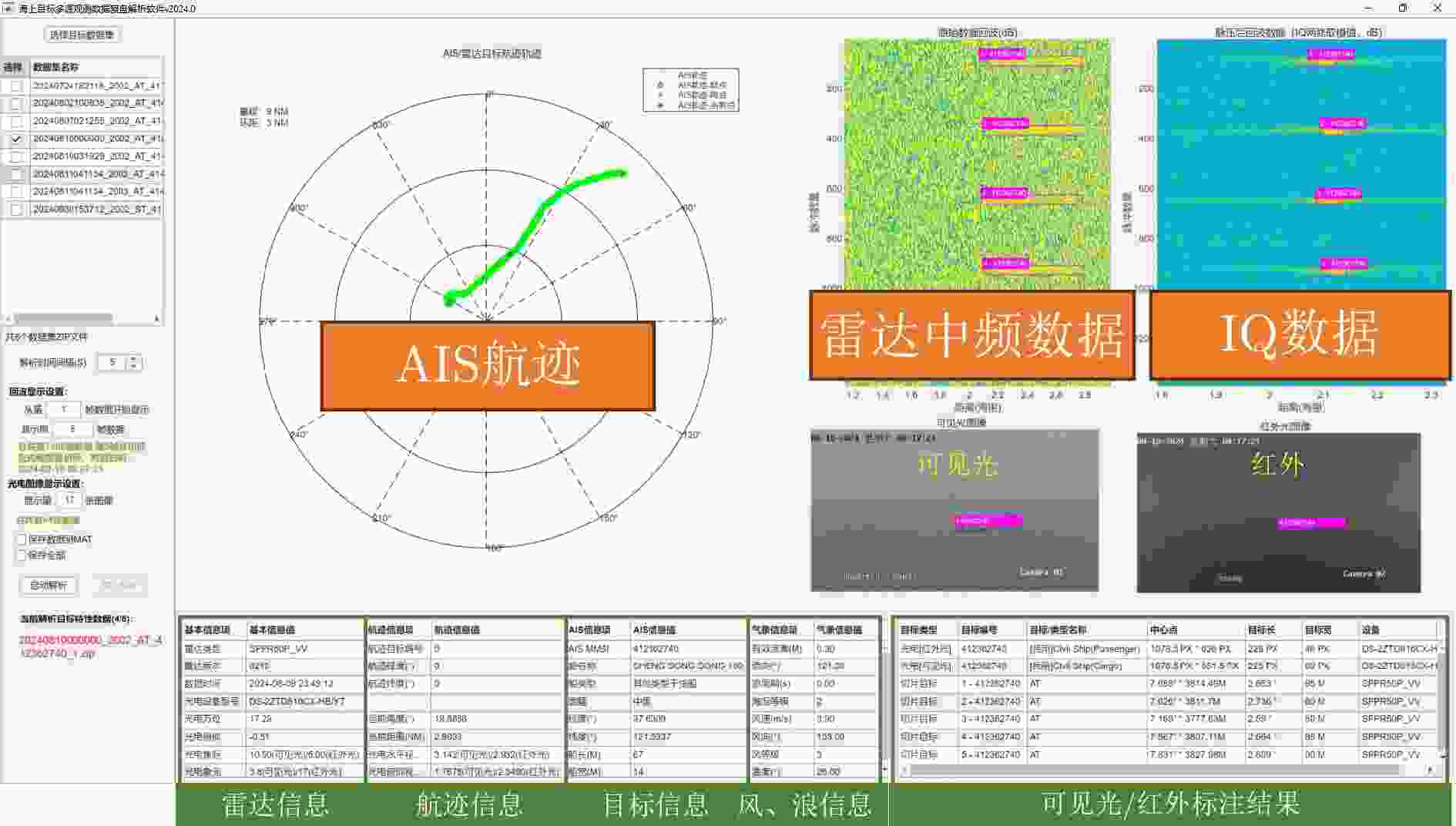
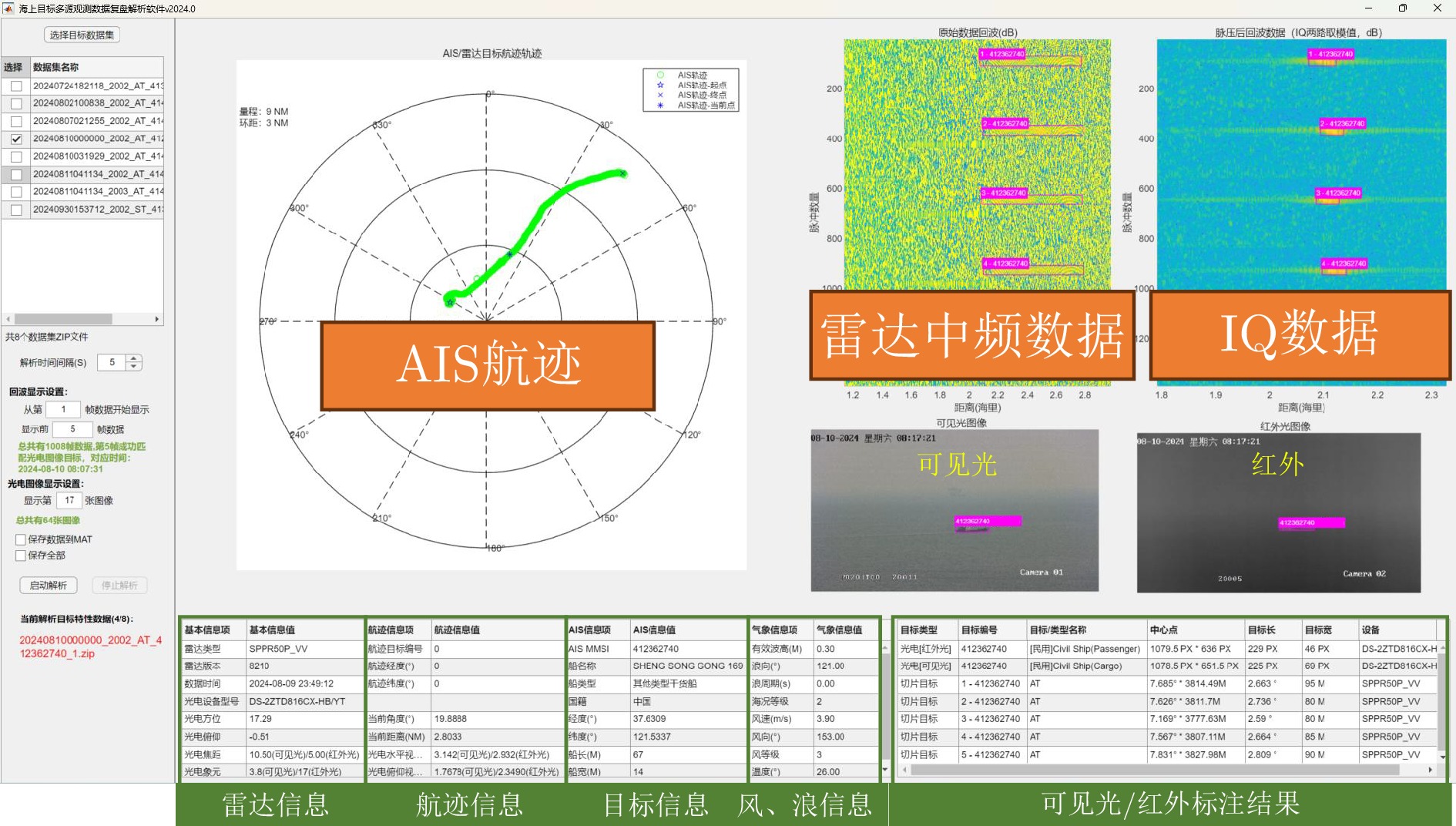
图 16
20240810000000 _2002_AT_412362740 _1数据复盘解析结果Figure 16.
20240810000000 _2002_AT_412362740 _1 data disk parsing result表 1 已共享的X波段固态全相参雷达对海探测数据
Table 1. Shared X-band solid-state fully coherent radar sea detection data
卷期 极化方式 数据量 场景介绍 2019年第1期 HH 3组 主要为扫描和凝视观测模式下的海杂波数据,目标为海面非合作目标。 2020年第1期 HH 2组 主要为凝视观测模式下的海杂波数据、海杂波+目标数据,目标为锚泊船只和航道浮标。 2020年第2期 HH 2组 为海面机动目标跟踪试验数据,目标为海面合作目标(小型快艇)。 2020年第3期 HH 1组 为雷达目标RCS定标试验数据,目标是RCS为0.25 m2不锈钢球,由渔船拖动或漂浮。 2021年第1期 HH 5组 为云雨气象条件下的雷达不同转速扫描试验数据,海面无合作目标。 2022年第1期 HH和VV 142组 主要为两部不同极化方式的雷达凝视观测模式下的海杂波+目标数据,目标为钢质航道浮标。  下载: 导出CSV
下载: 导出CSV
表 2 AIS设备主要参数
Table 2. Main parameters of AIS equipment
参数 数值 频率范围 156.025~162.025 MHz 输出功率 1 W/12.5 W AIS接收信道 2个(含A, B信道) 信道带宽 25 kHz 首次定位时间 <30 s (冷启动),<1 s (热启动) 水平位置精度 5 m (CEP50%,开阔地) 测速精度 0.1 m/s (50%@10 m/s) 工作温度 –15~+55°C
下载: 导出CSV
表 3 船只AIS静态报文示例
Table 3. Example of ship AIS static message
MMSI 船名称 船类型 国籍 经度(°) 纬度(°) 船长(m) 船宽(m) 413273440 CANG HANG JUN 1 工程及服务船 中国 37.5701 121.4279 131 25 414211000 BO HAI MA ZHU 客船 中国 37.5596 121.3810 179 28 412362740 SHENG SONG GONG 169 其他类型干货船 中国 37.5452 121.3901 67 14 413021330 BEI HAI JIU 119 搜救船 中国 37.5635 121.4287 100 15
下载: 导出CSV
表 4 不同运动状态船只AIS信息更新速率
Table 4. AIS information update rate of ships in different motion states
船舶运动状态 标称更新周期 实际更新周期 锚泊或靠泊且速度<3 kn 3 min 3~10 min 锚泊或靠泊且速度>3 kn 10 s 8~15 s 0~14 kn 10 s 8~15 s 0~14 kn且改变航向 $3\dfrac{1}{3} $ s 未测试 14~23 kn 6 s 4~10 s 14~23 kn且改变航向 2 s 未测试 大于23 kn 2 s 未测试
下载: 导出CSV
表 5 探测海域气象水文数据示例
Table 5. Example of meteorological and hydrological data from the sea area detected
日期 浪高(m) 浪向(°) 海况
等级风速 风向 风等级 最低温度(°C) 最高温度(°C) 天气 经度(°) 纬度(°) 2024/8/3 0.1 130 1 1.2 90 1 27 27 多云 121.449000 37.595000 2024/8/11 0.3 151 2 5.3 183 3 32 32 晴 121.449000 37.595000 2024/8/21 0.2 53 2 1.3 63 1 31 31 小雨 121.449000 37.595000 2024/9/20 1.4 1 4 9.1 28 5 18 18 小雨 121.449000 37.595000 2024/9/21 1.9 4 4 13.0 11 6 17 17 晴 121.449000 37.595000 2024/10/20 0.6 69 3 8.2 115 5 13 13 中雨 121.449000 37.595000 2024/11/16 0.8 233 3 8.3 315 5 6 6 阴 121.449000 37.595000 2025/1/8 1.4 346 4 11.2 339 6 –5 –5 小雪 121.449000 37.595000 2025/1/9 1.6 239 4 11.1 336 6 –6 –6 小雪 121.449000 37.595000 2025/1/26 0.2 124 2 4.1 271 3 –6 –6 暴雪 121.449000 37.595000
下载: 导出CSV
表 6 ZIP数据压缩文件协议
Table 6. ZIP data compression file protocol
数据类型 协议项 数据标志信息
(标志位1表示存在此数据,
0表示不存在此数据)雷达原始中频数据(解调脉压前)标志位 雷达中频数据(解调脉压后)标志位 雷达包络数据标志位 雷达航迹数据标志位 雷达航迹报文类型标志位 AIS数据标志位 ADS-B数据标志位 可见光图像/视频数据标志位 红外图像/视频数据标志位 雷达录屏数据标志位 气象水文(浪)数据标志位 气象水文(风)数据标志位 气象水文(温度)数据标志位 航姿仪数据标志位 备注文档(TXT)标志位 数据时间 数据时间 雷达设备信息 雷达品牌 雷达型号 雷达工作频率范围(GHz) 雷达俯仰波束宽度(°) 雷达方位波束宽度(°) 雷达极化方式 雷达脉冲重复频率(Hz) 雷达距离分辨率(m) 雷达发射增益(dB) 雷达STC设置 雷达天线工作方式 目标切片方位(相比于正北)范围(°) 目标切片距离范围(m) 雷达目标航迹信息 雷达目标航迹编号 雷达目标航迹经度 雷达目标航迹纬度 雷达目标速度 雷达目标对地航向(°) 目标AIS信息 船编号(AIS) 船名(AIS) 国籍(AIS) 船只类型(AIS) 船长(m)(AIS) 船宽(m)(AIS) 航行状态(AIS) 船只经度(AIS) 船只纬度(AIS) 船只时间(AIS,数据起始帧) 船只速度(AIS,数据起始帧) 船艏向(°)(AIS,数据起始帧) 对地航向(°)(AIS,数据起始帧) 光电数据信息 图像时间/视频起始对应的系统时间 可见光图像目标识别结果 红外图像目标识别结果 气象水文信息 有效浪高(m) 浪向(°) 海况等级 风速 风向(°) 风力等级 温度(°C) 天气 备用信息位 备用信息位
下载: 导出CSV
表 7 船只目标数据分类
Table 7. Target data classification
船体类型 船只类型 干货船 干散液散兼用船、散货船、其他类型干货船、
杂货船液货船 油船、油轮、石油化学品船、其他类型液货船 集装箱船和滚装船 集装箱船、滚装船 客船和轮船 客船、客轮 渔业船 捕捞船、渔船 工作和服务船 港口补给船、近海供应船、近海作业船、
拖船、引航船、工程及服务船执法和救援船 海警船、执法船、搜救船 娱乐和休闲船 帆船、娱乐船、游艇、快艇
下载: 导出CSV
表 8 数据集中部分目标数据列表
Table 8. List of partial target data in the data set
序号 目标数据名称 船只类型 1 20240810031929 _2002_AT_414095000 _1客船 2 20240802100838 _2002_AT_414211000 _1客船 3 20240807021255 _2002_AT_414211000 _1客船 4 20240811041134 _2002_AT_414211000 _1客船 5 20240811041134 _2003_AT_414211000 _1客船 6 20240724182118 _2002_AT_413273440 _1工程及服务船 7 20240810000000 _2002_AT_412362740 _1其他类型干货船
下载: 导出CSV
表 9 特征列表
Table 9. List of features
特征域 名称 计算方法与物理意义 时域 相对平均幅度RAA 待测单元与参考单元的平均比值,衡量检测单元与参考单元的幅度差异。 相对峰高RPH 待检测单元的脉冲回波峰值与相邻脉冲平均幅度的比值,反映目标与海杂波回波峰值在总信号的
能量占比及峰值起伏程度的差异。时域熵值二阶矩SOTE 待测单元信息熵值的方差,衡量目标和海杂波回波序列熵值的离散程度。 频域 相对多普勒峰高RDPH 待检测单元的多普勒峰值和参考单元的多普勒峰值均值的比值,
反映两类回波频率峰值能量占比、突变程度差异。相对多普勒向量熵RVE 待检测单元与参考单元频谱信息熵的比值,反映信号频谱的混乱程度。 频域熵值二阶矩SOFE 频域待检测单元频谱信息熵值的方差,反映两类序列频域熵值的离散程度。
下载: 导出CSV
-
[1] 李晨瑄, 胥辉旗, 钱坤, 等. 基于深度学习的舰船目标检测技术综述[J]. 兵器装备工程学报, 2021, 42(12): 57–63. doi: 10.11809/bqzbgcxb2021.12.008.LI Chenxuan, XU Huiqi, QIAN Kun, et al. Survey of ship detection technology based on deep learning[J]. Journal of Ordnance Equipment Engineering, 2021, 42(12): 57–63. doi: 10.11809/bqzbgcxb2021.12.008. [2] 黄泽贤, 吴凡路, 傅瑶, 等. 基于深度学习的遥感图像舰船目标检测算法综述[J]. 光学 精密工程, 2023, 31(15): 2295–2318. doi: 10.37188/OPE.20233115.2295.HUANG Zexian, WU Fanlu, FU Yao, et al. Review of deep learning-based algorithms for ship target detection from remote sensing images[J]. Optics and Precision Engineering, 2023, 31(15): 2295–2318. doi: 10.37188/OPE.20233115.2295. [3] WU Jinshan, LI Jiawen, LI Ronghui, et al. A fast maritime target identification algorithm for offshore ship detection[J]. Applied Sciences, 2022, 12(10): 4938. doi: 10.3390/app12104938. [4] 陈小龙, 饶桂林, 关键, 等. 被动雷达低慢小探测数据集(LSS-PR-1.0)及多域特征提取和分析方法[J]. 雷达学报(中英文), 2025, 14(2): 249–268. doi: 10.12000/JR24145.CHEN Xiaolong, RAO Guilin, GUAN Jian, et al. Passive radar low slow small detection dataset (LSS-PR-1.0) and multi-domain feature extraction and analysis methods[J]. Journal of Radars, 2025, 14(2): 249–268. doi: 10.12000/JR24145. [5] WANG Xiang, LIU Jingxian, LIU Xiangang, et al. Ship feature recognition methods for deep learning in complex marine environments[J]. Complex & Intelligent Systems, 2022, 8(5): 3881–3897. doi: 10.1007/s40747-022-00683-z. [6] WU Di, CAO Lihua, ZHOU Pengji, et al. Infrared small-target detection based on radiation characteristics with a multimodal feature fusion network[J]. Remote Sensing, 2022, 14(15): 3570. doi: 10.3390/rs14153570. [7] ROHEDA S, KRIM H, and RIGGAN B S. Robust multi-modal sensor fusion: An adversarial approach[J]. IEEE Sensors Journal, 2021, 21(2): 1885–1896. doi: 10.1109/JSEN.2020.3018698. [8] YU Meng, HAN Shaojie, WANG Tengfei, et al. An approach to accurate ship image recognition in a complex maritime transportation environment[J]. Journal of Marine Science and Engineering, 2022, 10(12): 1903. doi: 10.3390/jmse10121903. [9] VAN DER STAP N, VAN OPBROEK A, HUIZINGA W, et al. Maritime detection framework 2.0: A new approach of maritime target detection in electro-optical sensors[C]. The SPIE 10795, Electro-Optical and Infrared Systems: Technology and Applications XV, Berlin, Germany, 2018: 1079507. doi: 10.1117/12.2501424. [10] ZOU Junjie, YUAN Wei, and YU Menghong. Maritime target detection of intelligent ship based on faster R-CNN[C]. 2019 Chinese Automation Congress (CAC), Hangzhou, China, 2019: 4113–4117. doi: 10.1109/CAC48633.2019.8996260. [11] 关键, 刘宁波, 王国庆, 等. 雷达对海探测试验与目标特性数据获取——海上目标双极化多海况散射特性数据集[J]. 雷达学报, 2023, 12(2): 456–469. doi: 10.12000/JR23029.GUAN Jian, LIU Ningbo, WANG Guoqing, et al. Sea-detecting radar experiment and target feature data acquisition for dual polarization multistate scattering dataset of marine targets[J]. Journal of Radars, 2023, 12(2): 456–469. doi: 10.12000/JR23029. [12] 刘宁波, 丁昊, 黄勇, 等. X波段雷达对海探测试验与数据获取年度进展[J]. 雷达学报, 2021, 10(1): 173–182. doi: 10.12000/JR21011.LIU Ningbo, DING Hao, HUANG Yong, et al. Annual progress of the sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2021, 10(1): 173–182. doi: 10.12000/JR21011. [13] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089.LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089. [14] FARAHNAKIAN F and HEIKKONEN J. Deep learning based multi-modal fusion architectures for maritime vessel detection[J]. Remote Sensing, 2020, 12(16): 2509. doi: 10.3390/rs12162509. [15] LONG Jiawen, FANG Zhixiang, and WANG Lubin. SK-MMFMNet: A multi-dimensional fusion network of remote sensing images and EEG signals for multi-scale marine target recognition[J]. Information Fusion, 2024, 108: 102402. doi: 10.1016/j.inffus.2024.102402. [16] ZHU Xufang, HUANG Wenliang, and CHEN Zhongjie. Summarize of multi-sensor information fusion technology for USV colony[C]. 2022 International Conference on Cloud Computing, Big Data and Internet of Things (3CBIT), Wuhan, China, 2022: 149–154. doi: 10.1109/3CBIT57391.2022.00038. [17] QU Yufu, ZHANG Guirong, ZOU Zhaofan, et al. Active multimodal sensor system for target recognition and tracking[J]. Sensors, 2017, 17(7): 1518. doi: 10.3390/s17071518. [18] 于乐凯, 曹政, 孙艳丽, 等. 海上舰船目标可见光/红外图像匹配方法[J]. 海军航空大学学报, 2024, 39(6): 755–764, 772. doi: 10.7682/j.issn.2097-1427.2024.06.013.YU Lekai, CAO Zheng, SUN Yanli, et al. Visible and infrared images matching method for maritime ship targets[J]. Journal of Naval Aviation University, 2024, 39(6): 755–764, 772. doi: 10.7682/j.issn.2097-1427.2024.06.013. [19] JI Jingyu, ZHANG Yuhua, HU Yongjiang, et al. Fusion of infrared and visible images based on three-Scale decomposition and ResNet feature transfer[J]. Entropy, 2022, 24(10): 1356. doi: 10.3390/e24101356. [20] GENG Keke, ZOU Wei, YIN Guodong, et al. Low-observable targets detection for autonomous vehicles based on dual-modal sensor fusion with deep learning approach[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(9): 2270–2283. doi: 10.1177/0954407019859821. [21] OLTMANN J H and BOBER S. The shipborne automatic identification system (AIS)-its idea, its technology, and its applications in maritime and inland shipping[C]. European Symposium on Transport Telematics, Potsdam, Germany, 1999: 125–132. [22] SHI Xin, ZHAO Shuyi, and CHEN Zongwei. Research on key technologies and equipment composition of airborne equipment in automatic identification system[C]. Tenth International Conference on Mechanical Engineering, Materials, and Automation Technology (MMEAT 2024), Wuhan, China, 2024: 132614E. doi: 10.1117/12.3046617. [23] 刘东, 武裕鑫, 孙树政. 基于不同海浪谱船舶极限海况运动统计特征值预报分析[J]. 舰船科学技术, 2024, 46(9): 60–65. doi: 10.3404/j.issn.1672-7649.2024.09.010.LIU Dong, WU Yuxin, and SUN Shuzheng. Prediction analysis of statistical eigenvalues of ship motion based on different wave spectra under rough sea conditions[J]. Ship Science and Technology, 2024, 46(9): 60–65. doi: 10.3404/j.issn.1672-7649.2024.09.010. [24] 魏仪文, 郭立新, 殷红成. 海洋内波对海面电磁散射特性的影响分析[J]. 雷达学报, 2015, 4(3): 326–333. doi: 10.12000/JR15060.WEI Yiwen, GUO Lixin, and YIN Hongcheng. Analysis of the scattering characteristics of sea surface with the influence from internal wave[J]. Journal of Radars, 2015, 4(3): 326–333. doi: 10.12000/JR15060. [25] 王雪松. 雷达极化技术研究现状与展望[J]. 雷达学报, 2016, 5(2): 119–131. doi: 10.12000/JR16039.WANG Xuesong. Status and prospects of radar polarimetry techniques[J]. Journal of Radars, 2016, 5(2): 119–131. doi: 10.12000/JR16039. [26] 韩静雯, 杨勇, 连静, 等. 基于极化与距离像特征融合的雷达导引头角反射器鉴别方法[J]. 系统工程与电子技术, 2024, 46(11): 3658–3670. doi: 10.12305/j.issn.1001-506X.2024.11.08.HAN Jingwen, YANG Yong, LIAN Jing, et al. Identification method of corner reflector based on polarization and HRRP feature fusion for radar seeker[J]. Systems Engineering and Electronics, 2024, 46(11): 3658–3670. doi: 10.12305/j.issn.1001-506X.2024.11.08. [27] CHEN Zhongbiao, HE Yijun, and YANG Wankang. Study of ocean waves measured by collocated HH and VV polarized X-band marine radars[J]. International Journal of Antennas and Propagation, 2016, 2016(1): 8257930. doi: 10.1155/2016/8257930. [28] YANG Shiman, CAO Zheng, LIU Ningbo, et al. Maritime electro-optical image object matching based on improved YOLOv9[J]. Electronics, 2024, 13(14): 2774. doi: 10.3390/electronics13142774. [29] 田凯祥, 于晓涵, 王中训, 等. 基于实测数据的海杂波与海面小目标特征分析[J]. 海军航空大学学报, 2023, 38(4): 313–322. doi: 10.7682/j.issn.2097-1427.2023.04.002.TIAN Kaixiang, YU Xiaohan, WANG Zhongxun, et al. Analysis of sea clutter and small target characteristics based on measured data[J]. Journal of Naval Aviation University, 2023, 38(4): 313–322. doi: 10.7682/j.issn.2097-1427.2023.04.002. [30] 丁昊, 朱晨光, 刘宁波, 等. 高海况条件下海面漂浮小目标特征提取与分析[J]. 海军航空大学学报, 2023, 38(4): 301–312. doi: 10.7682/j.issn.2097-1427.2023.04.001.DING Hao, ZHU Chenguang, LIU Ningbo, et al. Feature extraction and analysis of small floating targets in high sea conditions[J]. Journal of Naval Aviation University, 2023, 38(4): 301–312. doi: 10.7682/j.issn.2097-1427.2023.04.001. [31] GAO Fei, KONG Lingzhe, LANG Rongling, et al. SAR target incremental recognition based on features with strong separability[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5202813. doi: 10.1109/TGRS.2024.3351636. [32] KONG Lingzhe, GAO Fei, HE Xiaoyu, et al. Few-shot class-incremental SAR target recognition via orthogonal distributed features[J]. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(1): 325–341. doi: 10.1109/TAES.2024.3443014. -










计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

